


行動頁面#
點選導覽列中「移動」會進入移動頁面,如圖所示。
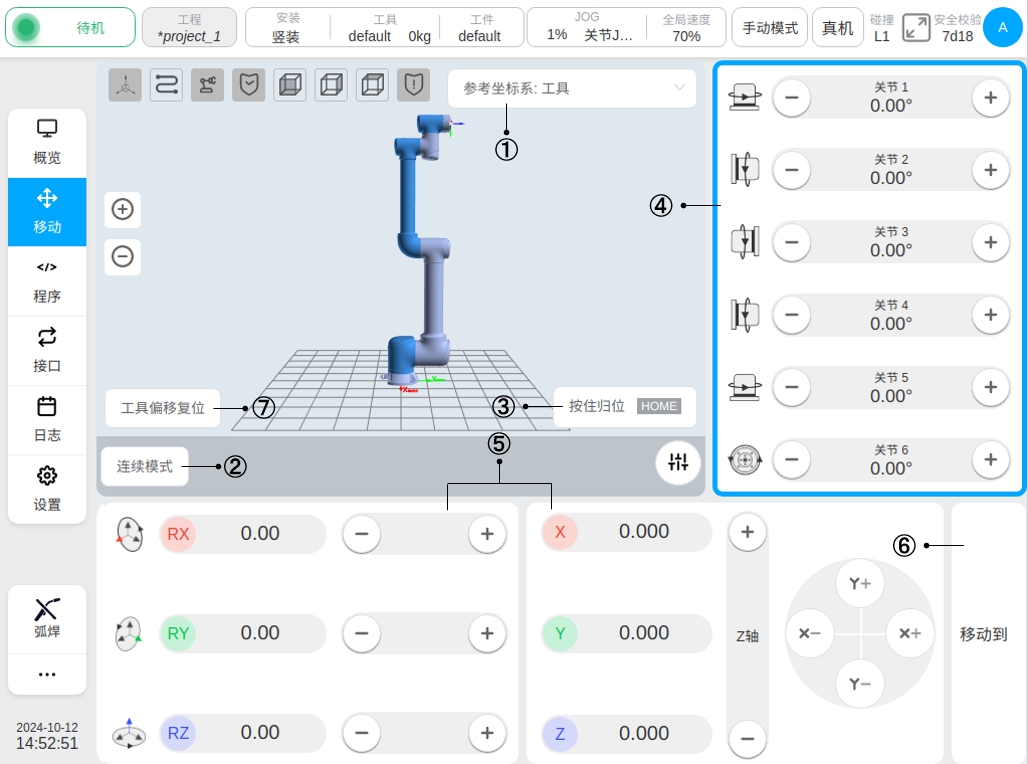
頁面左上方顯示3D模擬模型,點選圖示①選擇器,可選擇目前機器人使用的座標系和手動操作機器人的參考座標系,預設使用世界座標系(此系統中同基座座標系),表示以機器人底座為座標基點。亦可選擇工具座標系和工件座標系,工具座標系表示以末端工具的末端點為座標基點,工件座標係由使用者自由設定。切換參考座標系後,介面上顯示的機器人笛卡爾座標下的位置姿態資料會隨之改變。
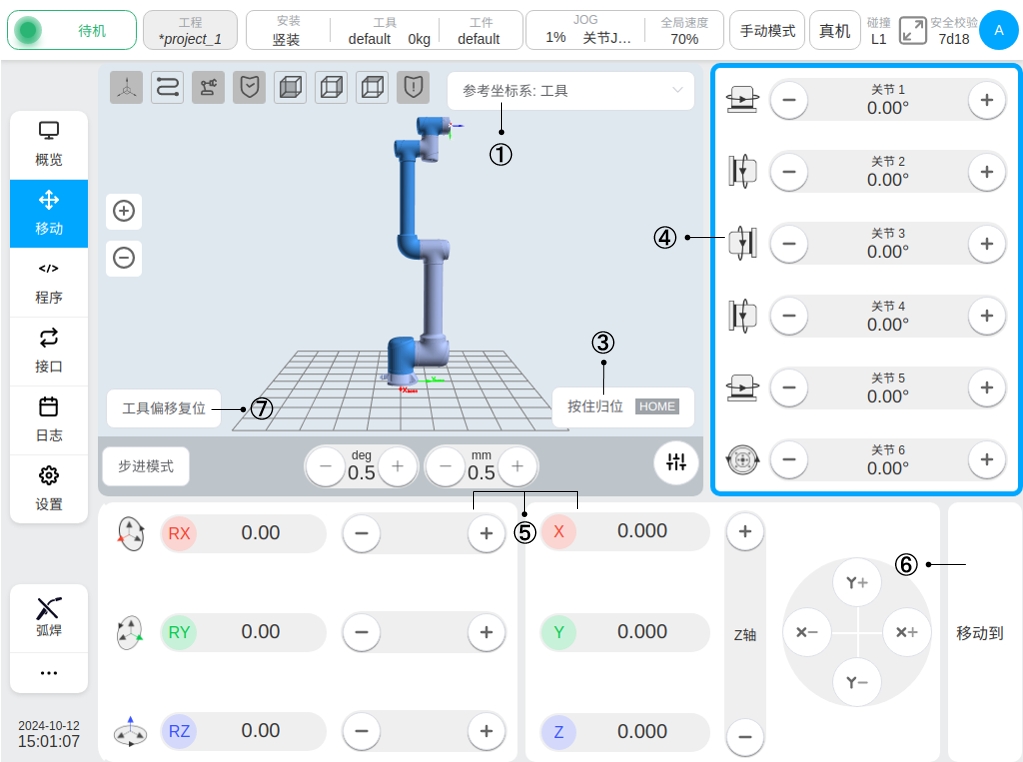
圖示②是使用者可進行模式切換的按鈕,按鈕顯示模式即為目前選擇的移動模式。點選“連續模式”按鈕,可切換至“步進模式”,且介面會顯示步進角度和步進距離的調節按鈕和資料顯示框。使用者自訂移動的步進角度和步進距離預設值為0.5deg和0.5mm,最小允許設定為0.1deg和0.1mm,最大允許設定為5deg和5mm。使用者可透過“-”“+”進行調整步進角度和步進距離。
圖示③是「按住歸位」按鈕,按住該按鈕機器人會移動到設定的HOME點,放開按鈕會停止移動。預設HOME點是每個關節角度值均為0°,機器人呈直立狀態。當機器人移動至「按住歸位」按鈕裡「HOME」字樣背景顯示為綠色,表示機器人已達到HOME位置,如圖所示。
區域④是手動操作機器人關節移動的區域,當單擊該區域任意地方,區域會顯示藍色邊框,代表當前手動操作機器人關節移動。按住某個關節的左邊箭頭或右邊箭頭按鈕可移動該關節向正方向或反方向移動,放開按鈕機器人關節會停止移動。使用者也可以按住示教器上右側“+”“-”按鈕移動關節,按鈕從上到下分別對應關節1~6。
區域⑤是手動操作機器人末端在笛卡爾座標系下移動的區域,同樣當單擊該區域任意地方,區域會顯示藍色邊框,代表當前手動操作機器人末端移動。按住X、Y、Z軸方向按鈕改變機器人在笛卡爾座標系下位置,按住RX、RY、RZ方向按鈕改變機器人在笛卡爾座標系下的姿態,鬆開對應按鈕機器人會停止移動。同樣,使用者可透過按住示教器上右側「+」「-」按鈕改變機器人的位置姿態,按鈕從上到下分別對應X、Y、Z、RX、RY、RZ六個移動方向。

圖示⑥是使用者進行手動輸入關節角度或位姿值和按住按鈕操作機器人移動兩種方式的切換按鈕,點選「移動到」按鈕,區域④和區域⑤會分別顯示輸入關節角度和位姿值的輸入框,且3D模型區會顯示一個目標點位置的灰透機器人模型。如圖所示:
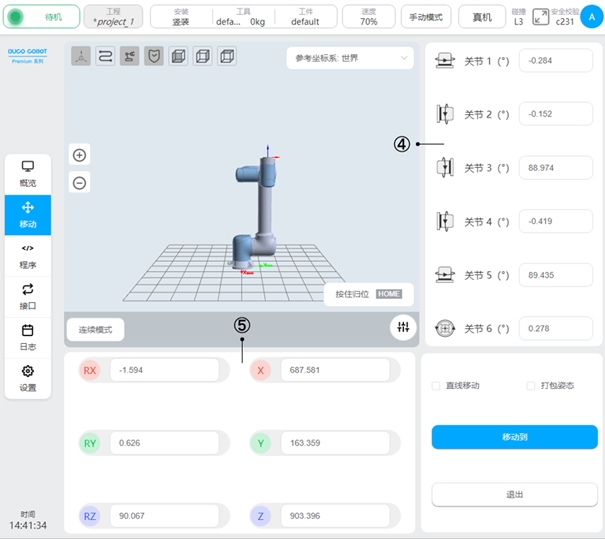
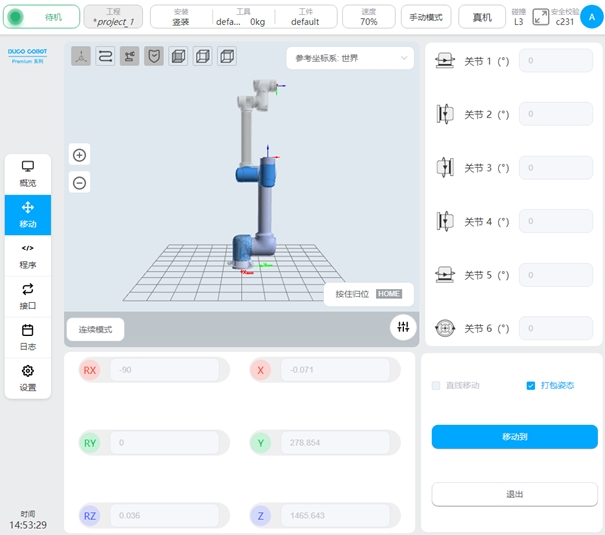
點選關節角度和位姿值的輸入框,彈出虛擬數字鍵盤,在虛擬數字鍵盤輸入目標位置資料後,點選「Esc」鍵關閉虛擬數字鍵盤。然後,按住「移動到」按鈕,機器人會移動到目標位置,放開該按鈕機器人會停止移動。當勾選「直線移動」單選框,表示機器人是以直線移動到目標位置;否則,表示機器人以關節移動到目標位置。當勾選「打包姿態」單選框時,「直線移動」單選框會被禁用勾選,關節角度和笛卡爾位置姿態輸入框分別被禁用輸入,對於已勾選的「直線移動」單選框會被取消勾選,關節角度和位置姿態值會顯示打包姿態時固定值,表示機器人會以關節移動到打包位置,單擊“退出”按鈕,會退出手動輸入目標位置的界面,回到原來的移動介面。如圖所示:
圖示⑦是「工具偏移重設」按鈕,只有當選擇移動頁面參考座標系為工具座標系時,才會顯示該按鈕。當使用者點擊該按鈕時,會以點擊時刻的位置為參考起始點,在操作機器人運動時會在區域⑤即時顯示機器人位置參考點擊該按鈕時的參考起始點的偏移量。直到使用者再次點選「工具偏移重設」按鈕才會更新TCP偏移量的計算參考起始點。