


狀態列#
介面頭部狀態列如圖所示。

機器人狀態指示燈:
機器人初始未上電狀態,指示燈為紅色;機器人上電未使能狀態,指示燈為橘色;機器人使能狀態,指示燈綠色。此指示燈的顏色與啟動介面中關節狀態指示燈顏色定義保持一致。
狀態顯示區:
該區域會顯示安全狀態、程式狀態、機器人狀態三類資訊。
安全狀態顯示字樣有:縮減模式、恢復模式、安全參數配置、安全板韌體升級、Stop0、Stop1、Stop2、安全板錯誤、機械手臂韌體升級;
程式狀態顯示字樣有:程式停止中、程式執行中、程式暫停、程式暫停中、任務執行中;
機器人狀態顯示字樣有:未上電、未使能、待機、韌體更新。
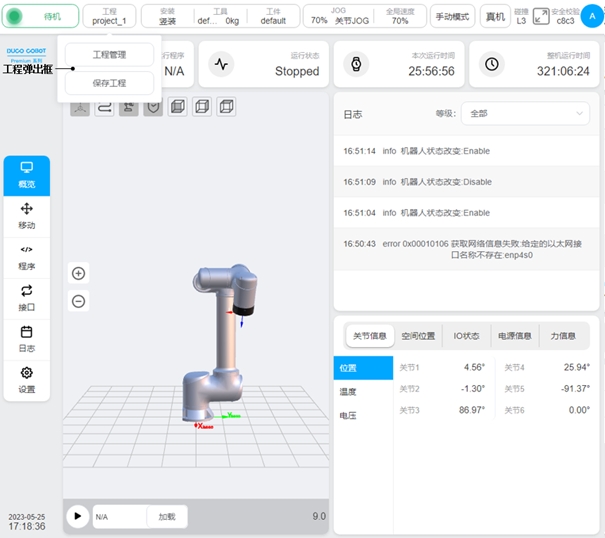
工程:
顯示目前工程名。點選“工程”,會顯示包含“工程管理”和“儲存工程”按鈕的彈出框,如圖所示。其中,工程管理部分,可以進行工程新建、匯入、匯出、復原、儲存到本機、備份到雲端、刪除、修改工程名稱等作業。
安裝:
顯示機器人目前安裝方向以及安裝位姿描述。按一下「安裝」顯示框,顯示機器人安裝方向和安裝位姿描述資訊彈出框,如圖所示。
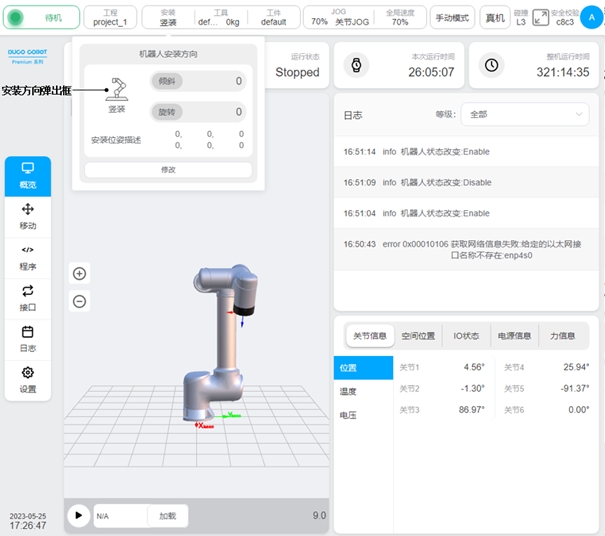
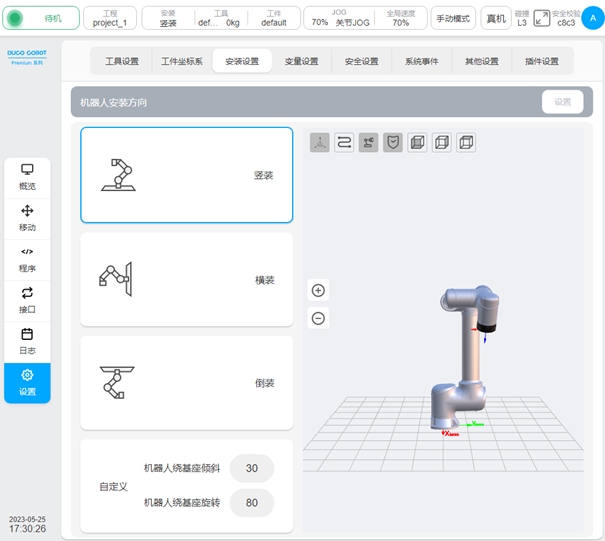
點選「修改」按鈕,會跳到設定介面里安裝設定子頁面,如圖所示。使用者可在該頁面設定機器人安裝方向操作。
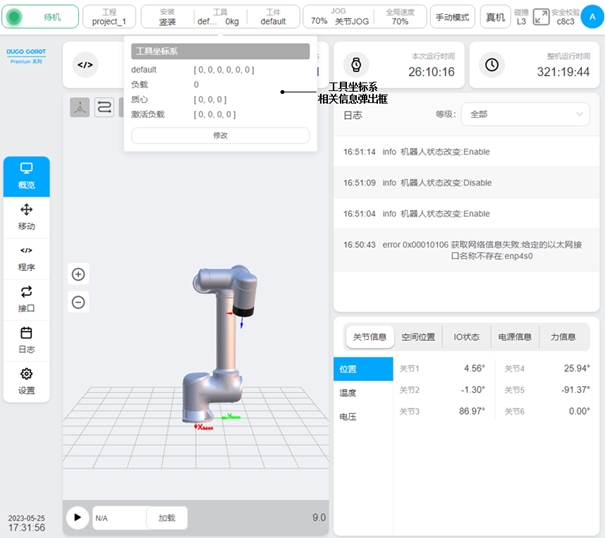
工具:
顯示機器人目前工具座標系名稱和負載品質。點選「工具」顯示框,顯示機器人工具座標系相關資訊的彈出框,如圖所示。點選「修改」按鈕,會進入設定介面裡工具設定子頁面,與上述跳到安裝設定介面類似。
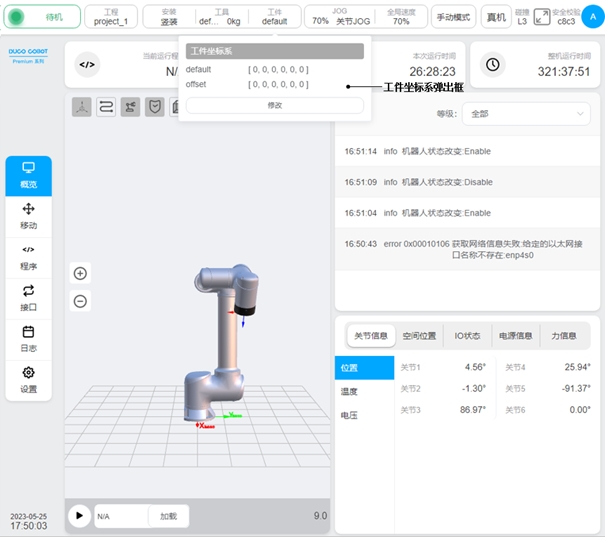
工件:
顯示機器人目前工件座標系名稱。點選「工件」顯示框,顯示機器人工件座標系資訊的彈出框,如圖所示。點選「修改」按鈕,會進入設定介面裡工件設定子頁面,與上述跳到安裝設定介面類似。
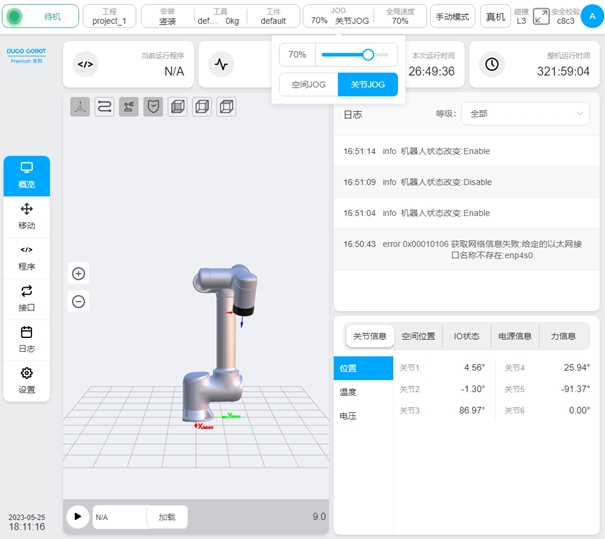
JOG速度/類型:
顯示機器人目前JOG速度的百分比。點選「JOG」顯示框,顯示JOG速度調節滑桿和JOG類型選擇鈕,可調節JOG速度或手動輸入以及對空間JOG或關節JOG進行切換。注意:僅影響本次開機時的機器人JOG速度,下次開機失效,若需要更改每次開機時的JOG速度,請在「設定」-「其他設定」-「啟動設定」設定預設JOG速度。
全域速度:
顯示機器人目前全域速度的百分比。按一下「速度」顯示框,顯示速度調整滑桿,可調整全域速度或手動輸入。注意:僅影響本次開機時的機器人全域速度,下次開機失效,若需要變更每次開機時的全域速度,請在「設定」-「其他設定」-「啟動設定」中設定預設全域速度。
操作模式:
顯示機器人操作模式,有手動模式和自動模式兩種。點選該顯示框,會顯示包含「手動模式」和 「自動模式」按鈕的彈出框,透過點選對應按鈕進行操作模式的切換。當使用者進行手動/自動模式切換時,使用者需要輸入目前登陸密碼,輸入正確密碼後,才可以進行模式的切換。啟用實體硬體模式切換訊號後,介面中的模式切換按鈕無效。
真機:
切換真機和仿真模式。仿真模式只能在機器人處於啟用待機且程式停止狀態下設定。當機器人因任何原因產生過斷使能行為後,機器人將自動切換回真機模式。
碰撞偵測:
碰撞偵測顯示目前的碰撞偵測設定狀態,以及安全等級。安全等級設定詳見第6.3.2章節。

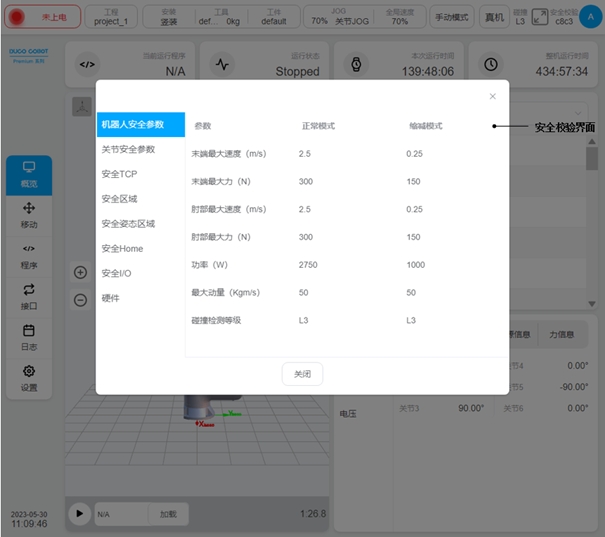
安全校驗碼:
顯示安全校驗碼。點選「安全校驗」區域,會跳出安全校驗介面,如圖所示。此介面顯示的是設定介面里安全設定子頁面下設定的安全配置參數。點選安全校驗介面下方「關閉」按鈕,或介面右上角叉號,可以關閉頁面。
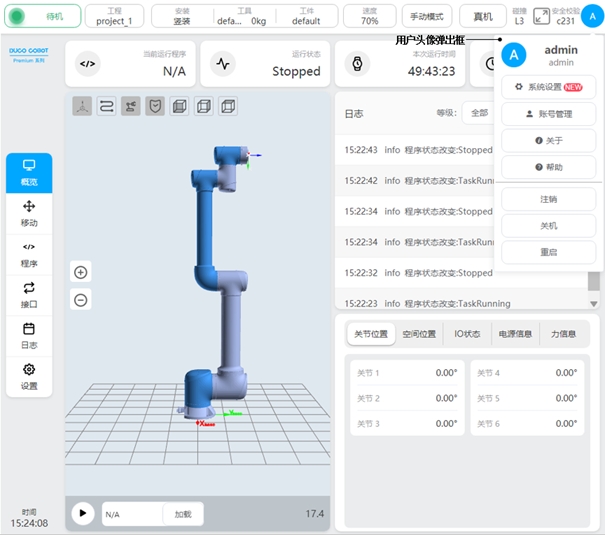
使用者頭像:
顯示登入使用者名稱首字母的大寫字母。點選使用者頭像,顯示如圖所示彈出框。其中,包含「變更密碼」(除admin權限以外使用者顯示)、「系統設定」、「帳號管理」(只有admin權限使用者顯示)、「關於」、「說明」、「登出」、「關機」和「重啟”按鈕。
點選「幫助」按鈕,將會出現「說明文件」浮窗,用於查詢錯誤代碼。