ภาพรวมระบบ#
การจัดการโครงการ#
ระบบรองรับการจัดการหลายโครงการ โดยข้อมูลโครงการประกอบด้วยโปรแกรมหุ่นยนต์ ตัวแปรทั่วโลกของโครงการ การตั้งค่าโครงการ และข้อมูลอื่นๆ เมื่อระบบเริ่มโหลด ข้อมูลโครงการปัจจุบันจะถูกโหลดตามการตั้งค่าระบบ ข้อมูลโครงการอื่นๆ ไม่สามารถใช้ในโครงการปัจจุบันได้
Caution
ข้อมูลโครงการทั้งหมด เช่น การตั้งค่าในหน้าอินเทอร์เฟซ การตั้งค่าในหน้าการตั้งค่า ฯลฯ จำเป็นต้องบันทึกหลังจากตั้งค่าโครงการ เพื่อให้โหลดได้อย่างถูกต้องในการบูตครั้งต่อไป
การจัดการผู้ใช้#
ระบบรองรับการจัดการผู้ใช้หลายคน สิทธิ์ของผู้ใช้ถูกกำหนดเป็น: ผู้ปฏิบัติงาน โปรแกรมเมอร์ ผู้ดูแลระบบ และผู้ดูแลระบบ สิทธิ์เฉพาะมีรายละเอียดดังนี้:
ผู้ควบคุม
อนุญาตให้เลือกโครงการ โปรแกรมที่กำลังทำงาน โปรแกรมที่รันด้วยตนเอง ดูสถานะของหุ่นยนต์ ฯลฯ
โปรแกรมเมอร์
สิทธิ์การใช้งานของผู้ควบคุม
การเขียนโปรแกรมหุ่นยนต์ การกำหนดค่าโครงการ
ชื่อผู้ใช้เริ่มต้นคือค่าเริ่มต้น และรหัสผ่านเริ่มต้นคือ 123
ผู้ดูแลระบบ
สิทธิ์การใช้งานของผู้ควบคุม
การอัปเดตระบบ
ผู้ดูแลระบบ
สิทธิ์การใช้งานของผู้ดูแลระบบ
การจัดการผู้ใช้
ชื่อผู้ใช้คือผู้ดูแลระบบ และรหัสผ่านเริ่มต้นคือ 123
ภาพรวมหน้าผู้ใช้#
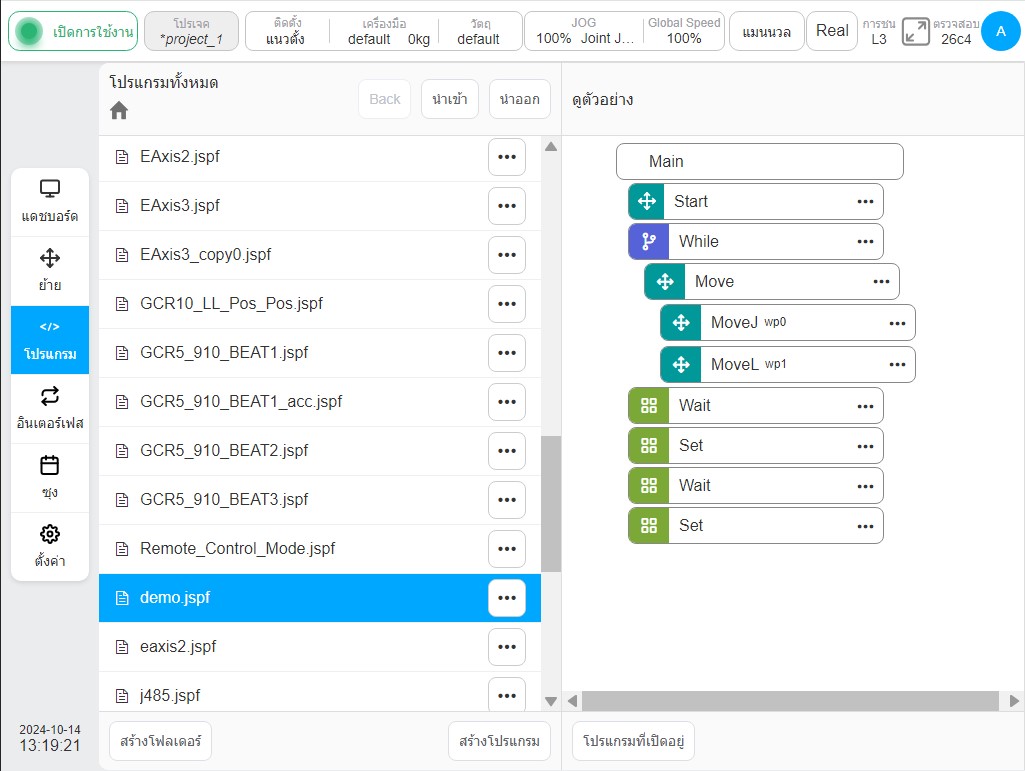
ดังที่แสดงในรูป อินเทอร์เฟซโดยรวมแบ่งออกเป็นสามส่วนหลักๆ ได้แก่ แถบสถานะส่วนหัว แถบนำทางด้านซ้าย และพื้นที่เนื้อหาทางด้านขวา พื้นที่เนื้อหานำเสนอเนื้อหา (หน้าย่อย) ที่แตกต่างกันตามการเลือกแถบนำทางด้านซ้ายที่แตกต่างกัน ด้านล่างแถบนำทางคือรายการปลั๊กอินและวันที่และเวลาของระบบ
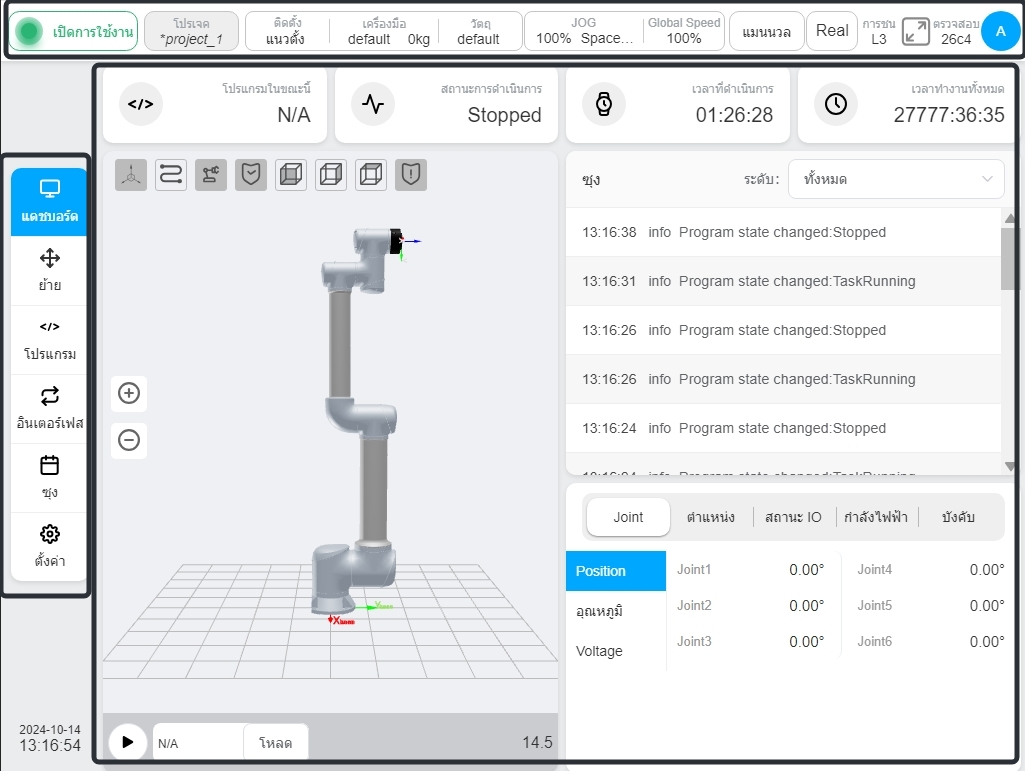
ข้อมูลหลักที่แสดงในแถบสถานะ ได้แก่ ไฟแสดงสถานะข้อต่อหุ่นยนต์ การแสดงสถานะ โปรเจ็กต์ปัจจุบัน ทิศทางการติดตั้งหุ่นยนต์ ข้อมูลเกี่ยวกับระบบพิกัดเครื่องมือปัจจุบันและระบบพิกัดชิ้นงาน เปอร์เซ็นต์ความเร็ว โหมดการทำงาน ข้อมูลการตั้งค่าการตรวจจับการชน รหัสตรวจสอบความปลอดภัย และข้อมูลผู้ใช้
แถบนำทางประกอบด้วยไอคอน 6 ไอคอน ได้แก่ แผงควบคุม ย้าย โปรแกรม อินเทอร์เฟซ บันทึก และการตั้งค่า การคลิกไอคอนของแถบนำทางเพื่อสลับเนื้อหาที่แสดงในพื้นที่เนื้อหา เนื้อหาหลักของแต่ละหน้าจะอธิบายดังนี้:
หน้าภาพรวมเป็นหน้ามุมมองการผลิตที่อนุญาตให้เลือกโปรแกรมที่จะรัน และแสดงข้อมูลพื้นฐาน เช่น สถานะของโปรแกรม เวลาการทำงานของระบบ บันทึกระบบ และตำแหน่งข้อต่อ
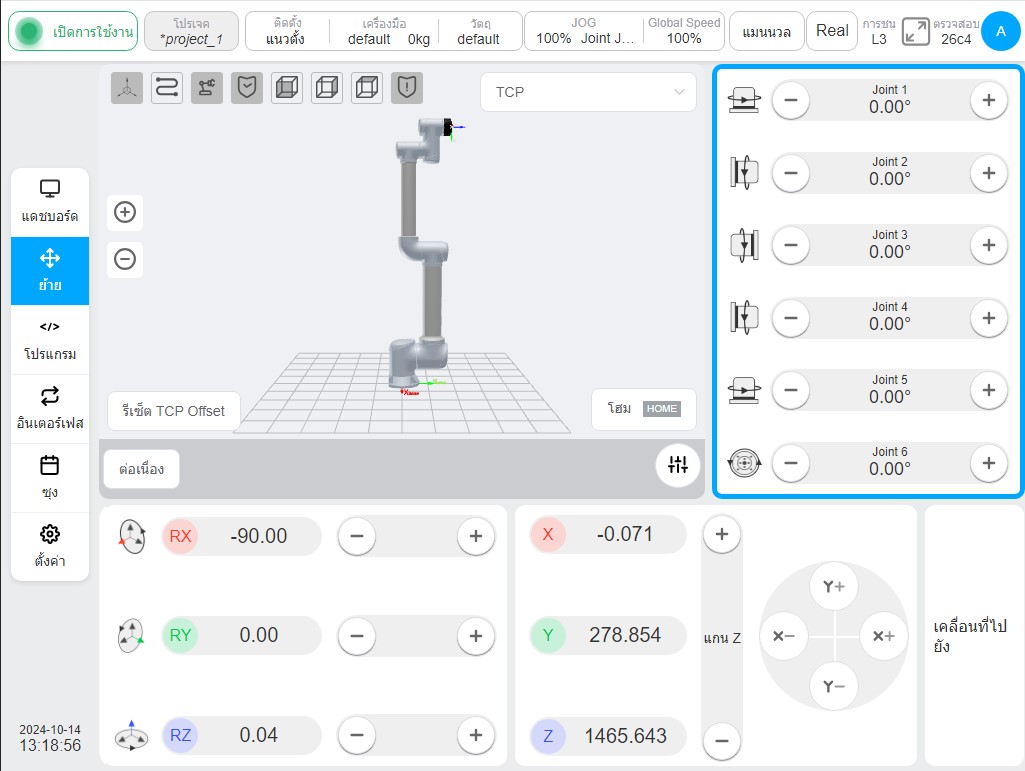
อินเทอร์เฟซการเคลื่อนย้ายช่วยให้ผู้ใช้ควบคุมหุ่นยนต์ด้วยตนเอง ตั้งค่าระบบพิกัด ตลอดจนโหมดการเคลื่อนที่ด้วยตนเอง
อินเทอร์เฟซโปรแกรมเป็นหน้าการเขียนโปรแกรมหลักของหุ่นยนต์ ซึ่งผู้ใช้สามารถจัดการไฟล์โปรแกรมในโครงการ ตลอดจนเขียนงานหุ่นยนต์ผ่านสภาพแวดล้อมการเขียนโปรแกรมกราฟิกที่ให้มา
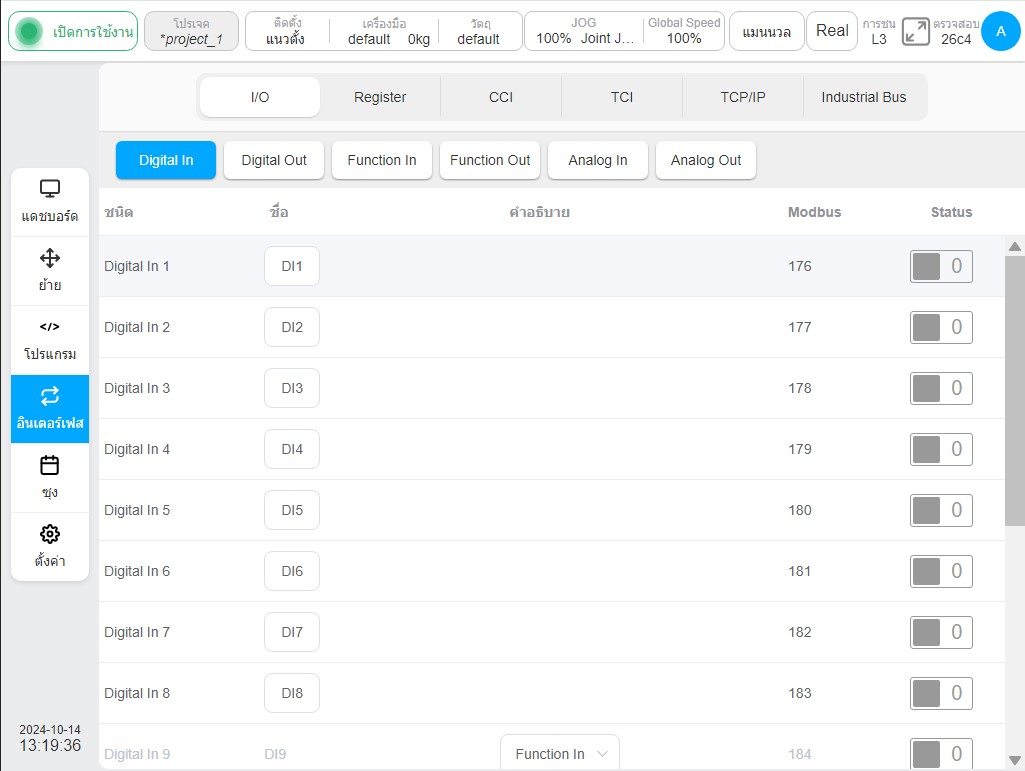
หน้าอินเทอร์เฟซช่วยให้ผู้ใช้กำหนดค่าอินเทอร์เฟซภายนอกทั้งหมดของหุ่นยนต์ รวมถึงอินพุตและเอาต์พุตดิจิทัล อินพุตและเอาต์พุตอนาล็อก อินเทอร์เฟซ TCP/IP และอินเทอร์เฟซฟิลด์บัสอุตสาหกรรมอื่นๆ
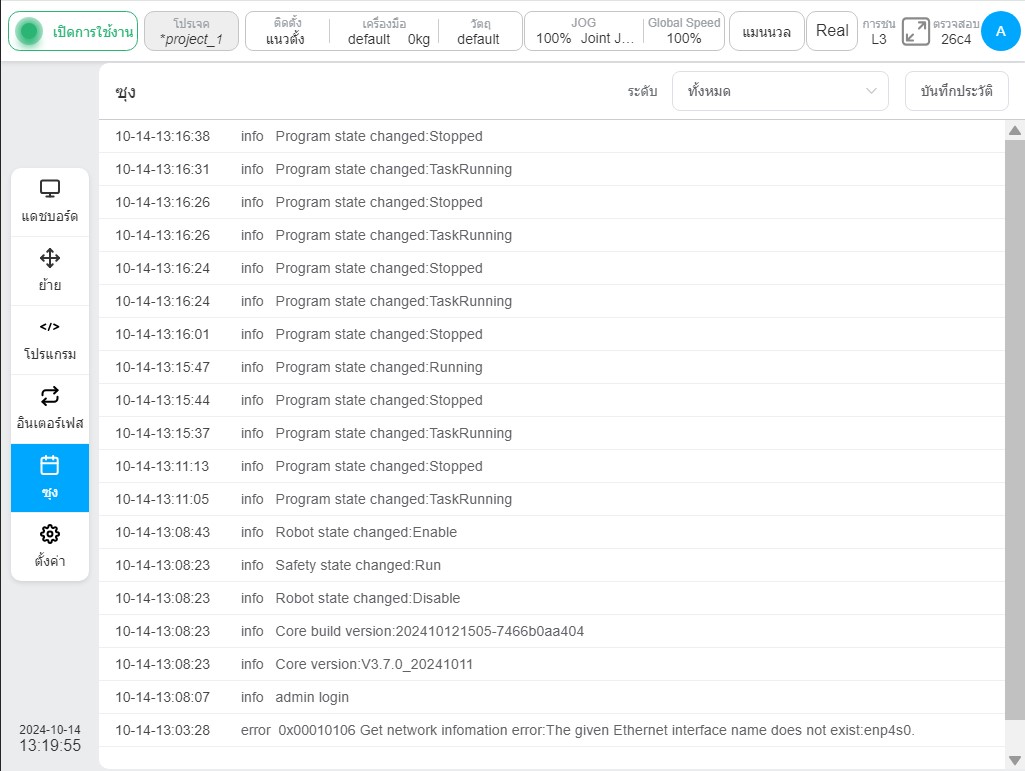
หน้าบันทึกจะแสดงข้อมูลบันทึกระบบตั้งแต่เริ่มต้นระบบนี้
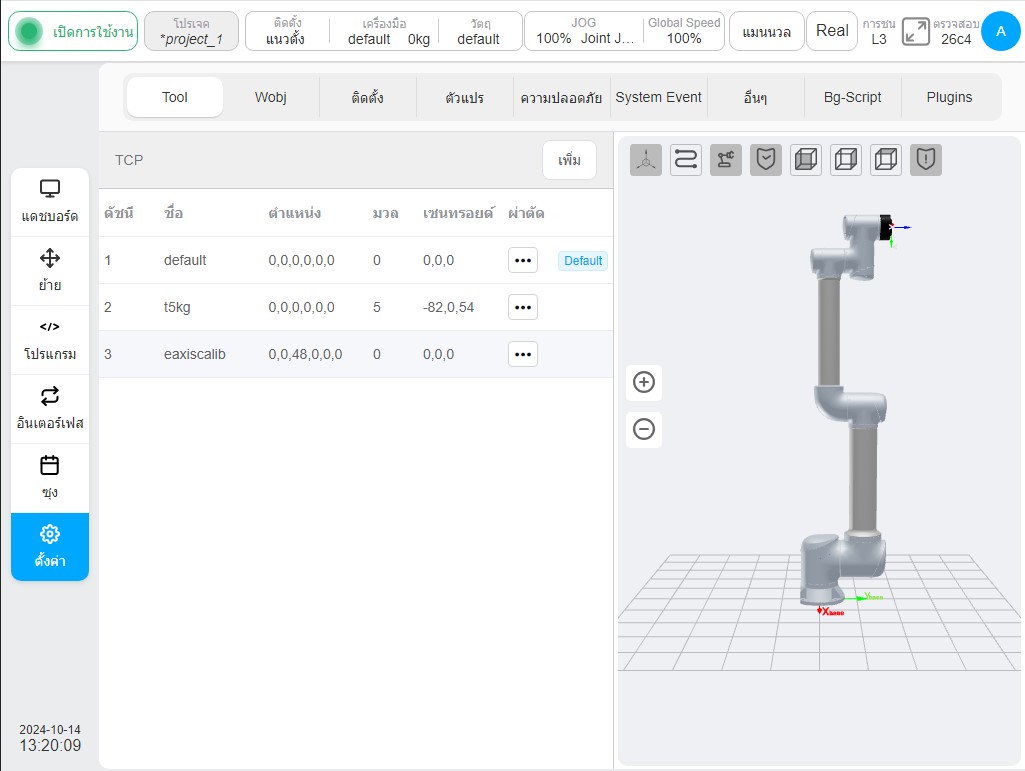
หน้าการตั้งค่าประกอบด้วยการตั้งค่าคอนฟิกูเรชันโครงการปัจจุบัน ซึ่งรวมถึงการตั้งค่าระบบพิกัด การตั้งค่าทิศทางการติดตั้ง และการตั้งค่าความปลอดภัย
การเชื่อมต่อหลายเทอร์มินัล#
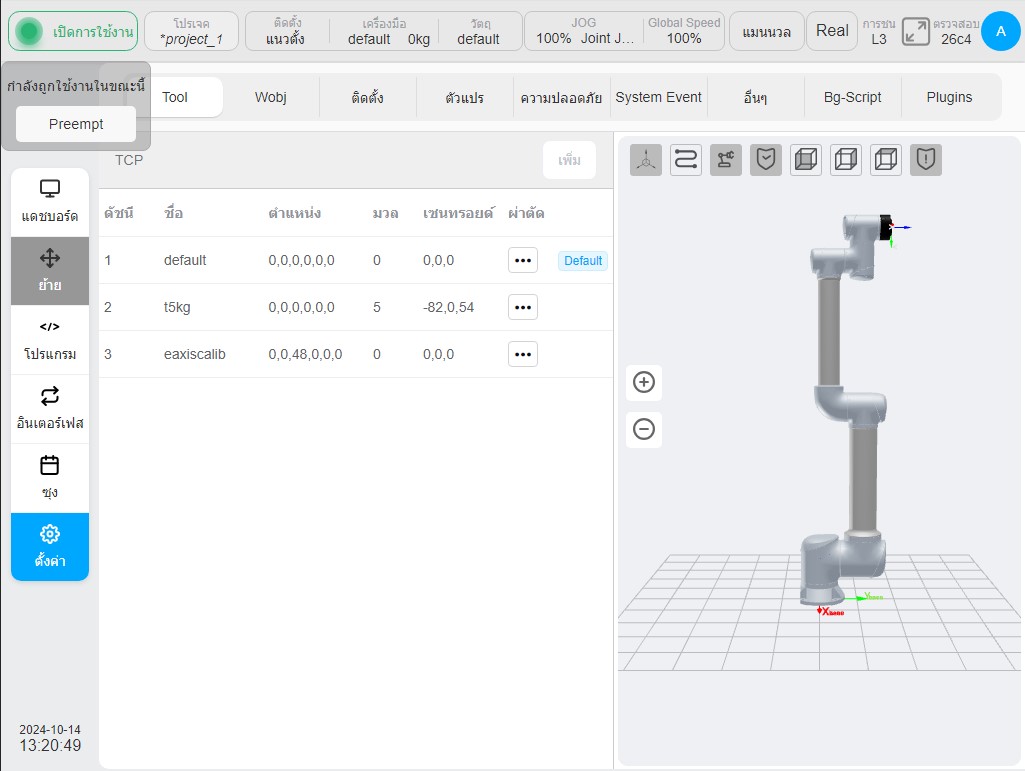
ระบบรองรับการเชื่อมต่อเทอร์มินัลหลายตัวพร้อมกัน แต่มีเพียงเทอร์มินัลเดียวเท่านั้นที่สามารถควบคุมได้ และสามารถทำงานต่างๆ ได้ทั้งหมด เช่น การทำงานของโปรแกรมและการกำหนดค่าระบบ เทอร์มินัลอื่นๆ มีสิทธิ์ในการดูเท่านั้น ซึ่งไม่สามารถเข้าถึงเพื่อเรียกใช้หุ่นยนต์หรือแก้ไขการตั้งค่าได้ เทอร์มินัลที่ไม่มีสิทธิ์ควบคุมจะแสดงดังต่อไปนี้:
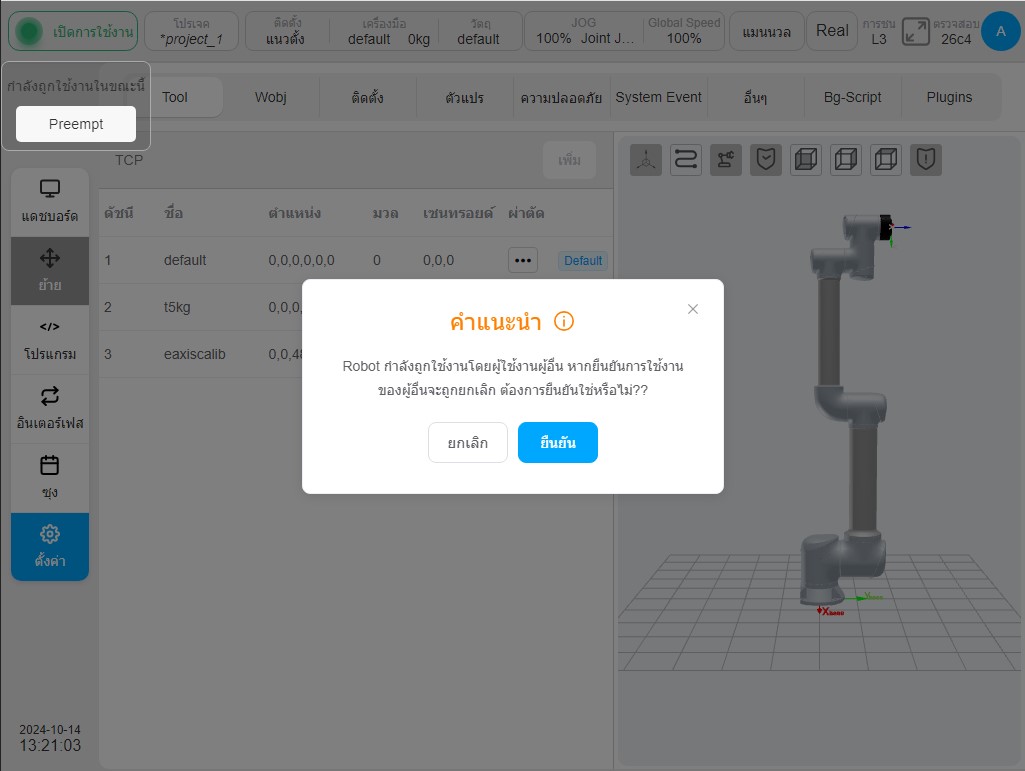
เมื่อเทอร์มินัลอื่นๆ ต้องการควบคุม ให้คลิกปุ่ม "รับการควบคุม" ที่มุมซ้ายบนเพื่อขออนุญาต กล่องโต้ตอบต่อไปนี้จะปรากฏขึ้น ให้คลิกปุ่ม "ตกลง" เพื่อรับการควบคุมระบบ จากนั้นการควบคุมเทอร์มินัลก่อนหน้าจะสูญหายไป
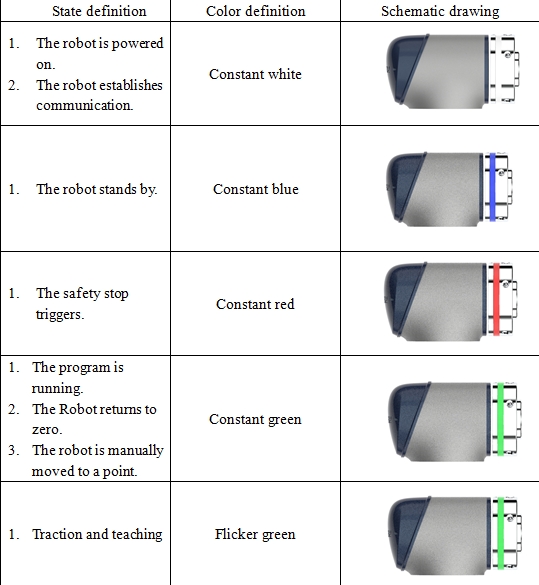
ไฟท้ายพร้อมไฟบอกสถานะ#