การตั้งค่าความปลอดภัย#
ส่วนนี้จะอธิบายวิธีดูการกำหนดค่าความปลอดภัยและเปลี่ยนการกำหนดค่าความปลอดภัยของแอปพลิเคชัน ปัจจุบันมีตัวควบคุมความปลอดภัยอยู่ 2 ประเภท ได้แก่ DucoSafetyV1.0 สำหรับตู้ควบคุม DC30 DucoSafetyV2.0 ปรับเปลี่ยนให้เหมาะกับตู้ควบคุม DC00 / DC15S/ DC30D
DucoSafety V1.0#
ดูการกำหนดค่าความปลอดภัย#
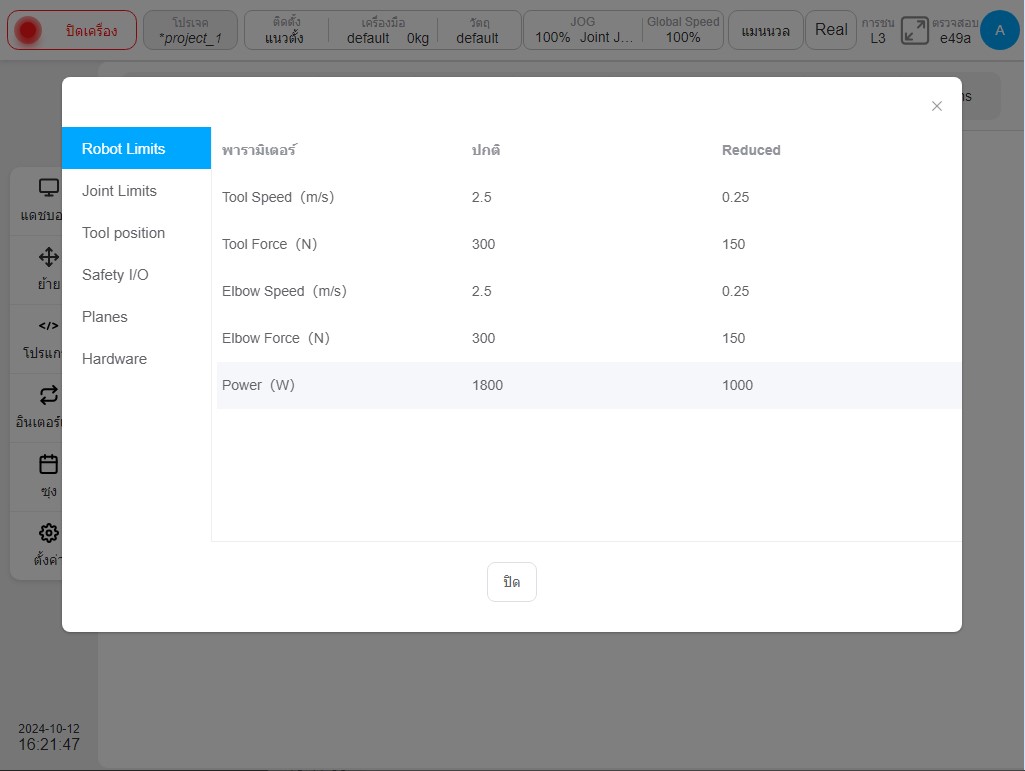
คลิกปุ่ม 'การตรวจสอบความปลอดภัย' บนแถบสถานะ กล่องโต้ตอบต่อไปนี้จะปรากฏขึ้นเพื่อดูพารามิเตอร์การกำหนดค่าความปลอดภัยที่เปิดใช้งานอยู่ในปัจจุบัน
ผู้ใช้ยังสามารถดูพารามิเตอร์การกำหนดค่าความปลอดภัยได้ในหน้าการตั้งค่าความปลอดภัย
การเปลี่ยนการตั้งค่าความปลอดภัย#
คุณต้องใช้รหัสผ่านเพื่อปลดล็อคบัญชีก่อนทำการเปลี่ยนแปลงการตั้งค่าความปลอดภัย เข้าสู่หน้าการตั้งค่า -- การตั้งค่าความปลอดภัย คลิกปุ่ม 'ปลดล็อค' ที่ด้านล่างซ้ายเพื่อปลดล็อคหุ่นยนต์เมื่อปิดเครื่องเท่านั้น ป้อนรหัสผ่าน (รหัสผ่านเข้าสู่ระบบของผู้ใช้ปัจจุบัน) จากนั้นเข้าสู่โหมดการกำหนดค่าพารามิเตอร์ความปลอดภัยหลังจากผ่านการตรวจสอบ พื้นที่สถานะบนแถบสถานะจะแสดงเป็นการตั้งค่าพารามิเตอร์ความปลอดภัย
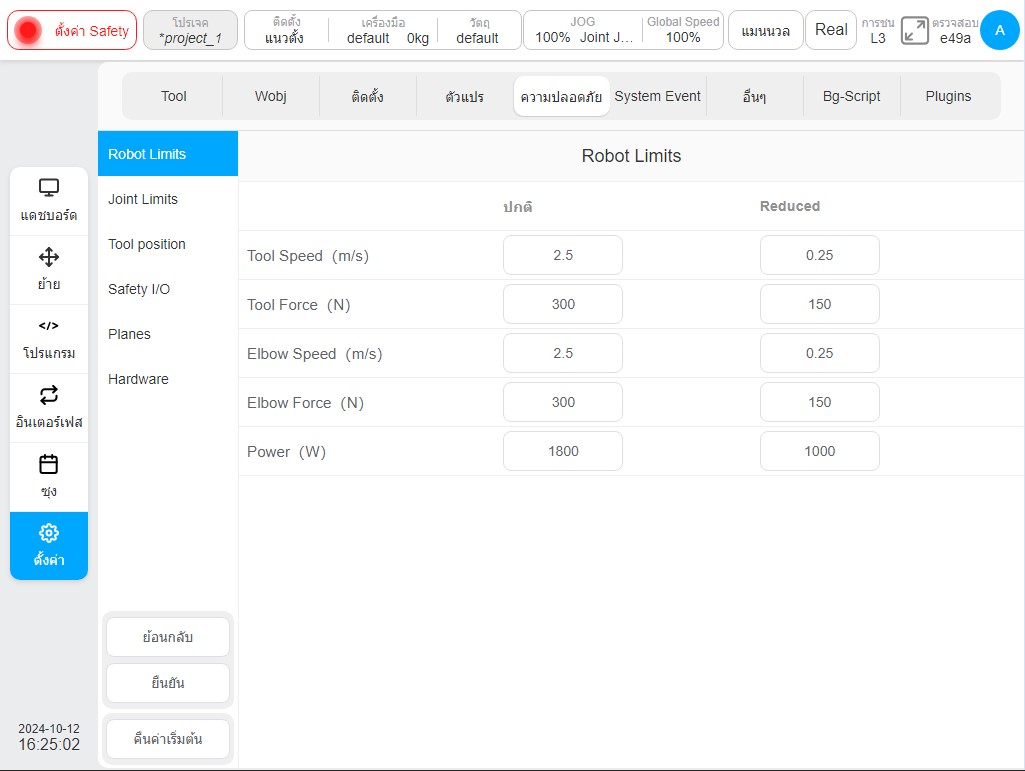
เมื่อคุณเปลี่ยนแปลงการตั้งค่า การแก้ไขจะถูกเน้นด้วยสีเหลือง การเปลี่ยนแปลงทั้งหมดที่เกิดขึ้นจะมีผลเมื่อคลิกปุ่ม 'ใช้การตั้งค่า' เท่านั้น การคลิกปุ่ม 'คืนค่าการตั้งค่าเริ่มต้น' เพื่อคืนค่าพารามิเตอร์ความปลอดภัยทั้งหมดเป็นการตั้งค่าเริ่มต้น หลังจากคลิกปุ่ม 'ใช้การตั้งค่า' กล่องพร้อมท์จะปรากฏขึ้นดังที่แสดงในรูปภาพ
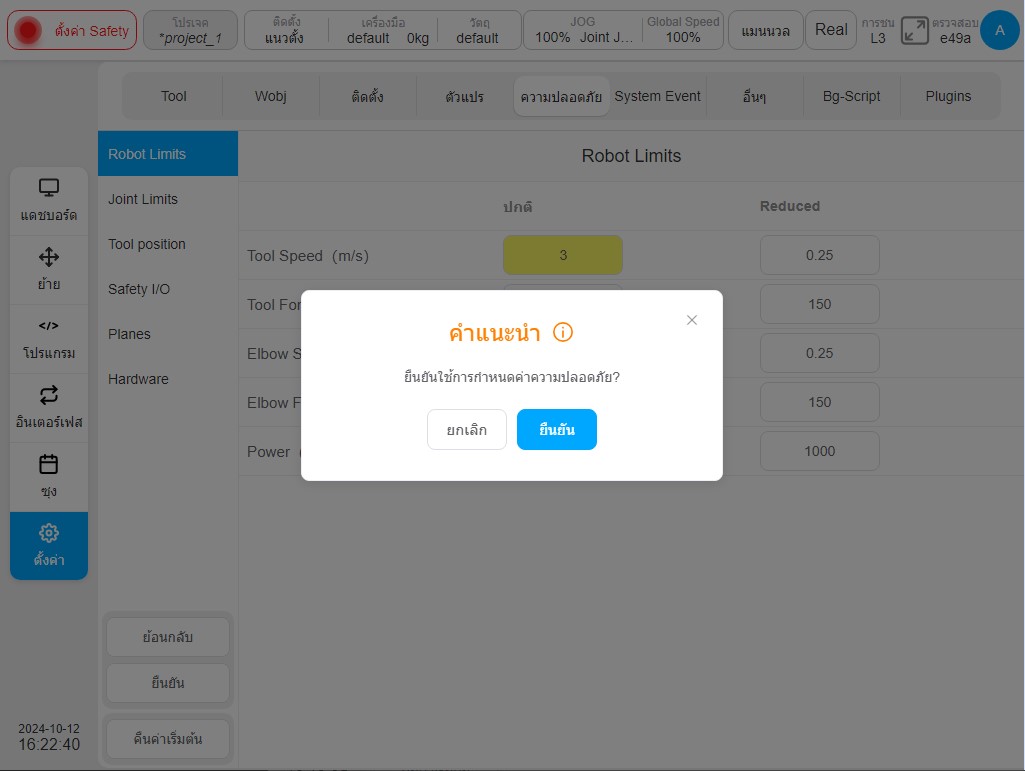
หลังจากคลิกปุ่ม 'ยืนยัน' จะมีกล่องพร้อมท์สำหรับการโหลดพารามิเตอร์ความปลอดภัยปรากฏขึ้นดังที่แสดงในรูปภาพ
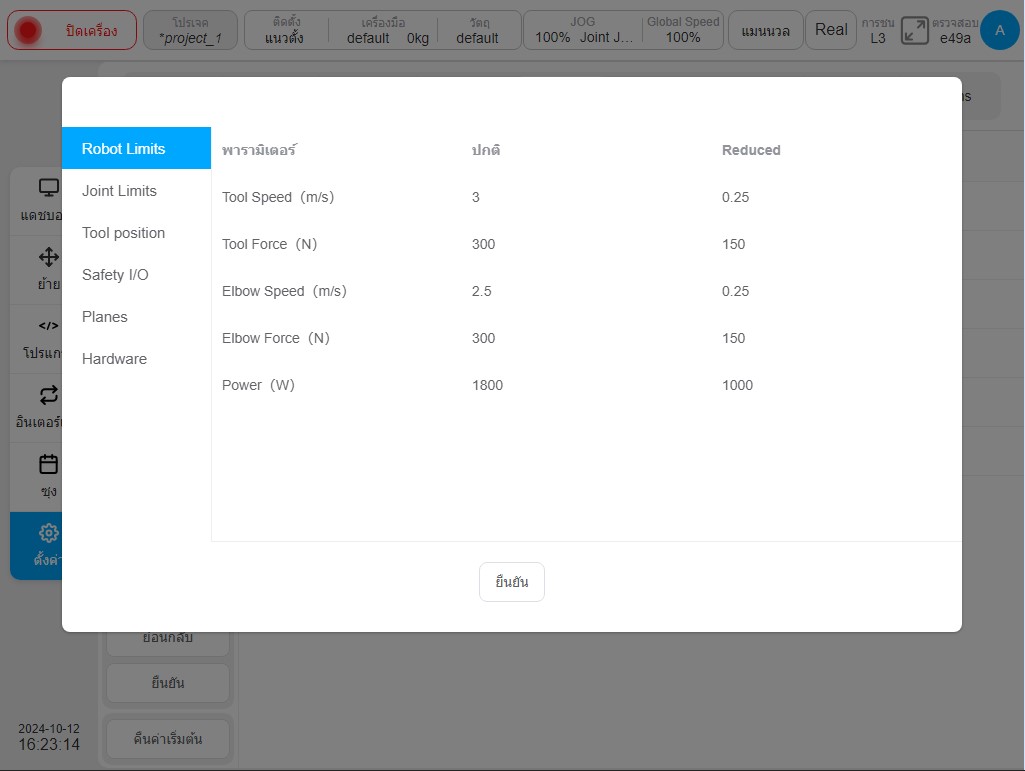
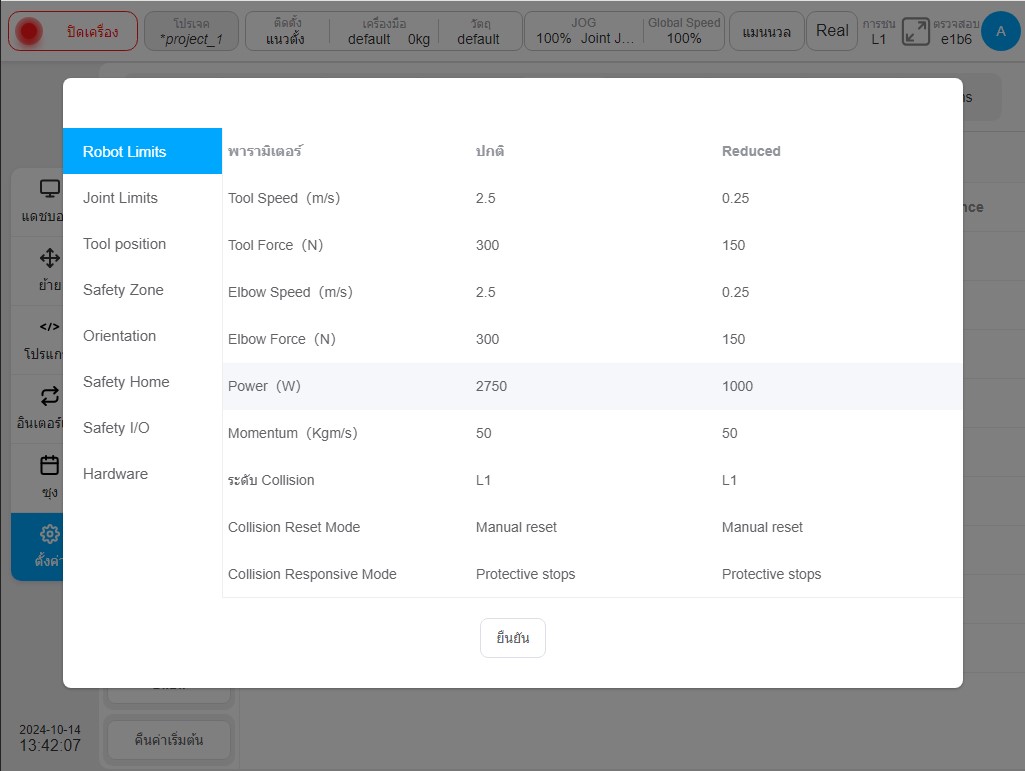
หลังจากกำหนดค่าพารามิเตอร์ความปลอดภัยแล้ว ระบบจะแสดงพารามิเตอร์ความปลอดภัยที่กำหนดค่าไว้ในกล่องโต้ตอบเพื่อตรวจสอบ ตามตัวอย่างที่แสดงในรูปภาพต่อไปนี้ เมื่อตรวจสอบทุกอย่างแล้ว ให้คลิกปุ่ม 'ตกลง' เพื่อตั้งค่าพารามิเตอร์ความปลอดภัย เมื่อกำหนดค่าสำเร็จ การตรวจสอบความปลอดภัยเหนือแถบสถานะจะเปลี่ยนไป
คำอธิบายพารามิเตอร์ด้านความปลอดภัย#
ส่วนนี้จะอธิบายพารามิเตอร์การกำหนดค่าด้านความปลอดภัยของหุ่นยนต์
โหมดปลอดภัย#
โหมดปกติ:โหมดปลอดภัยจะเปิดใช้งานตามค่าเริ่มต้น
โหมดลดขนาด:โหมดนี้สามารถเปิดใช้งานได้โดยใช้อินพุต IO เพื่อความปลอดภัย
โหมดการกู้คืน:เมื่อพารามิเตอร์การเคลื่อนไหวจริงของหุ่นยนต์เกินขีดจำกัดความปลอดภัย ส่งผลให้หุ่นยนต์หยุด โหมดการกู้คืนจะเปิดใช้งาน และผู้ใช้สามารถเคลื่อนย้ายหุ่นยนต์ภายในขีดจำกัดความปลอดภัยได้
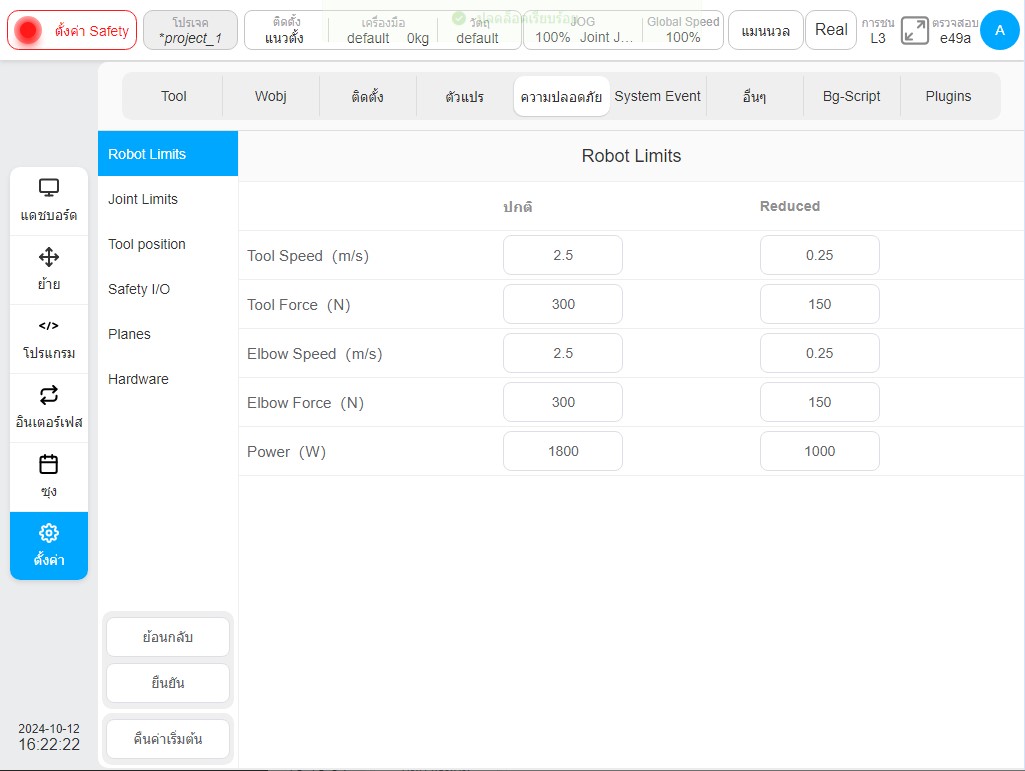
พารามิเตอร์ความปลอดภัยของหุ่นยนต์#
พารามิเตอร์ของหุ่นยนต์ใช้เพื่อจำกัดการเคลื่อนไหวทั่วไปของหุ่นยนต์ ผู้ใช้สามารถกำหนดค่าพารามิเตอร์ได้ในโหมดปกติและโหมดลดลง
Maximum End Speed จำกัดความเร็วสูงสุดที่ปลายหุ่นยนต์
Maximum Force at the End จำกัดแรงสูงสุดที่ใช้ภายนอกที่ปลายหุ่นยนต์
Maximum Elbow Speed จำกัดความเร็วสูงสุดของข้อศอกของหุ่นยนต์
Maximum Elbow Force จำกัดแรงภายนอกสูงสุดที่ใช้โดยข้อศอกของหุ่นยนต์
Power จำกัดปริมาณงานเชิงกลสูงสุดของหุ่นยนต์ที่กระทำต่อภายนอก
พารามิเตอร์ความปลอดภัยของข้อต่อ#
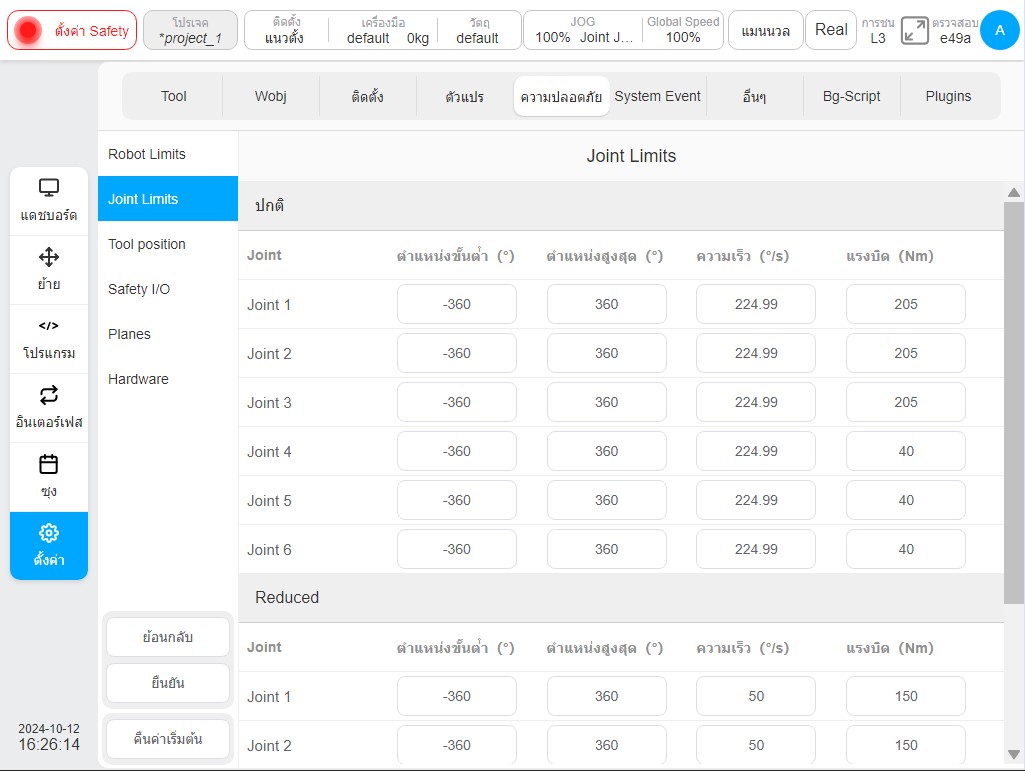
พารามิเตอร์จำกัดข้อต่อใช้เพื่อจำกัดช่วงตำแหน่ง ความเร็วสูงสุด และแรงบิดสูงสุดของข้อต่อแต่ละข้อของหุ่นยนต์ คุณสามารถกำหนดค่าพารามิเตอร์ในโหมดปกติและโหมดลดขนาดได้
ช่วงตำแหน่ง:กำหนดตำแหน่งต่ำสุดและสูงสุดของข้อต่อแต่ละข้อ
ความเร็วสูงสุด:กำหนดความเร็วเชิงมุมสูงสุดของข้อต่อแต่ละข้อ
แรงบิดสูงสุด:กำหนดแรงบิดสูงสุดของข้อต่อแต่ละข้อ
ระบบความปลอดภัย TCP#
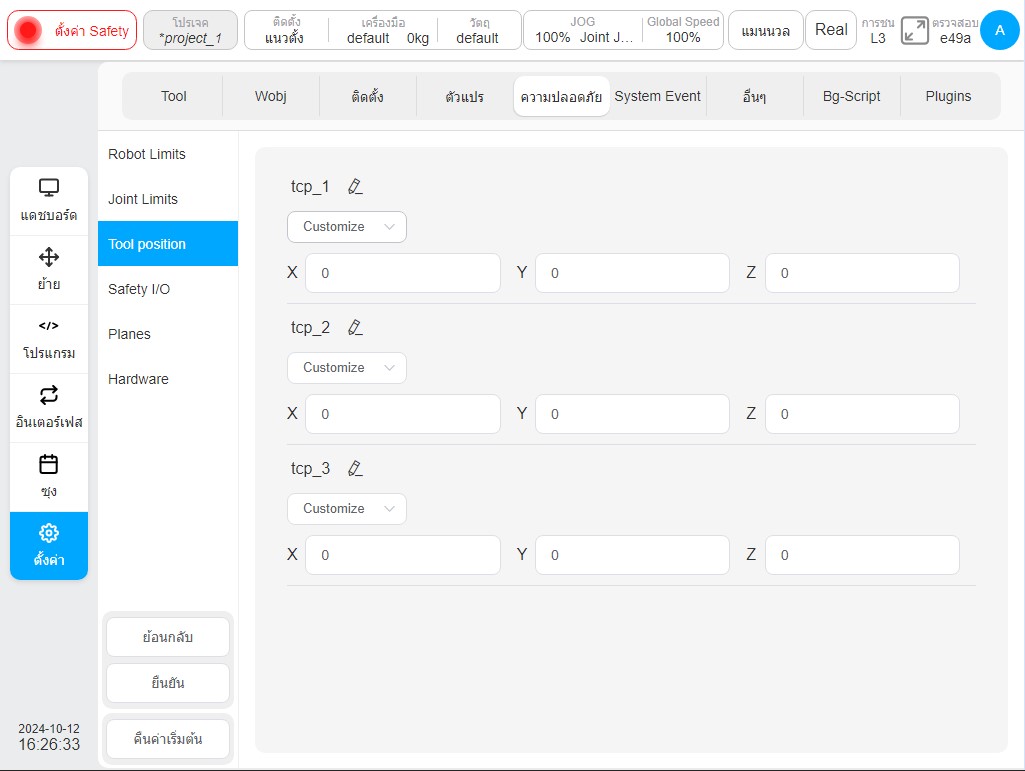
ระบบความปลอดภัยสามารถกำหนดค่าออฟเซ็ต TCP ได้สามชุด เมื่อกำหนดค่าแล้ว หุ่นยนต์จะใช้ระบบนี้เพื่อติดตามความเร็วและตรวจสอบตำแหน่ง ตำแหน่งหรือความเร็ว TCP ใดๆ ที่เกินค่าที่กำหนดจะถือว่าเป็นการละเมิดความปลอดภัย
การตรวจสอบความเร็วคือความเร็วสูงสุดของเครื่องมือใน "พารามิเตอร์ความปลอดภัยของหุ่นยนต์" การตรวจสอบตำแหน่งเรียกอีกอย่างว่า "ขอบเขตเสมือน" ในกล่องดร็อปดาวน์ คุณสามารถเลือก TCP ที่มีอยู่หรือกำหนดค่า XYZ โดยตรงได้ เมื่อคุณเลือก TCP ที่มีอยู่และเปลี่ยนค่าในช่องป้อนข้อมูล X, Y และ Z ชื่อ TCP ในเมนูดร็อปดาวน์จะกลายเป็น "กำหนดเอง" ซึ่งระบุ TCP ที่กำหนดขึ้นใหม่
การแก้ไขการตั้งค่า TCP จะไม่ส่งผลต่อพารามิเตอร์ความปลอดภัยที่กำหนดค่าไว้
IO ด้านความปลอดภัย#
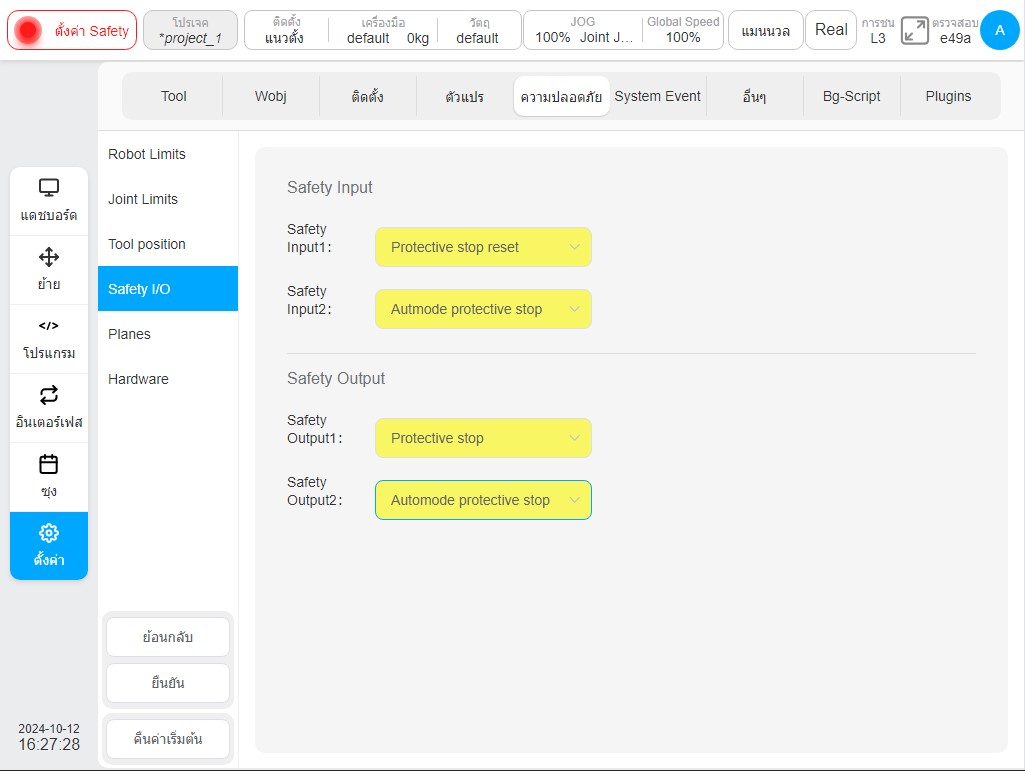
โมดูล I/O ด้านความปลอดภัยประกอบด้วยพอร์ตอินพุตด้านความปลอดภัยที่กำหนดค่าได้ 2 พอร์ตและพอร์ตเอาท์พุตด้านความปลอดภัยที่กำหนดค่าได้ 2 พอร์ต
คุณสมบัติอินพุตด้านความปลอดภัย ได้แก่:
อินพุตการรีเซ็ตการป้องกัน: เมื่อการป้องกันหยุดลง พอร์ตจะถูกกระตุ้นและหุ่นยนต์จะกลับสู่สถานะปกติ
อินพุตการหยุดป้องกันโหมดอัตโนมัติ: หลังจากกำหนดค่า เมื่อหุ่นยนต์กระตุ้นพอร์ตในโหมดอัตโนมัติ หุ่นยนต์จะหยุดป้องกัน
อินพุตการรีเซ็ตการป้องกันโหมดอัตโนมัติ: เมื่อการป้องกันโหมดอัตโนมัติหยุดลง พอร์ตจะถูกกระตุ้นและหุ่นยนต์จะกลับสู่สถานะปกติ
อินพุตโหมดลดลง: หลังจากกำหนดค่า พอร์ตนี้จะถูกกระตุ้นและหุ่นยนต์จะเปลี่ยนเป็นโหมดลดลง หุ่นยนต์จะช้าลงเพื่อให้ค่าพารามิเตอร์ที่จำกัดตรงตามค่าพารามิเตอร์ด้านความปลอดภัยในโหมดลดลง
คุณสมบัติเอาต์พุตด้านความปลอดภัย ได้แก่:
เอาต์พุต Guard Stop: พอร์ตนี้จะถูกกระตุ้นเมื่อหุ่นยนต์อยู่ในสถานะหยุดป้องกัน
เอาต์พุต Guard Stop ในโหมดอัตโนมัติ: พอร์ตนี้จะถูกกระตุ้นเมื่อหุ่นยนต์อยู่ในสถานะหยุดป้องกันโหมดอัตโนมัติ
เอาต์พุตโหมดลดขนาด: พอร์ตนี้จะถูกกระตุ้นเมื่อหุ่นยนต์อยู่ในโหมดลดขนาด
ขอบเขตเสมือน#
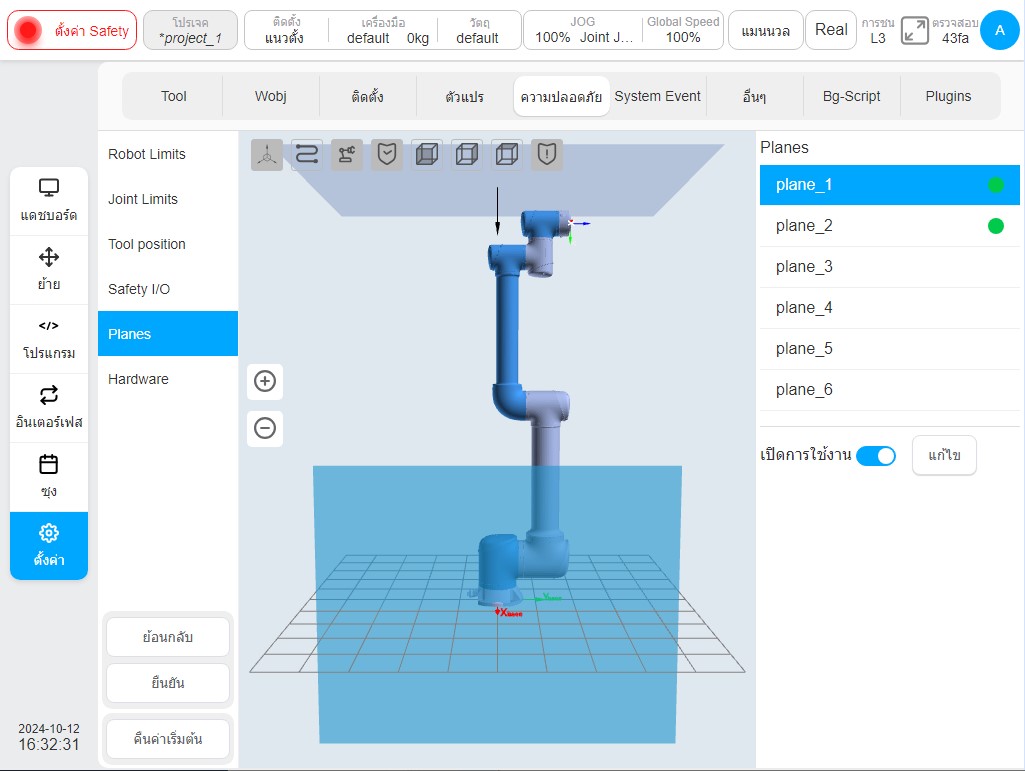
ขอบเขตเสมือนสามารถใช้เพื่อจำกัดพื้นที่ทำงานของหุ่นยนต์ได้ สามารถกำหนดขอบเขตเสมือนได้ 6 ขอบเขตเพื่อจำกัดเครื่องมือและข้อศอกของหุ่นยนต์ เมื่อเครื่องมือและข้อศอกของหุ่นยนต์สัมผัสขอบเขตเสมือน หุ่นยนต์จะหยุดโดยมีการป้องกัน
ตัวบ่งชี้สีเขียวทางด้านขวาของอินเทอร์เฟซระบุว่าระนาบถูกเปิดใช้งาน ในขณะที่จอแสดงผล 3 มิติสามารถแสดงตำแหน่งของขอบเขตเสมือนที่เปิดใช้งานและพื้นที่ที่มีประสิทธิผลของขอบเขตเสมือน เมื่อเลือกระนาบ ระนาบที่ตรงกันจะถูกเน้นบนจอแสดงผล 3 มิติ
ขอบเขตเสมือนถูกกำหนดในลักษณะต่อไปนี้:
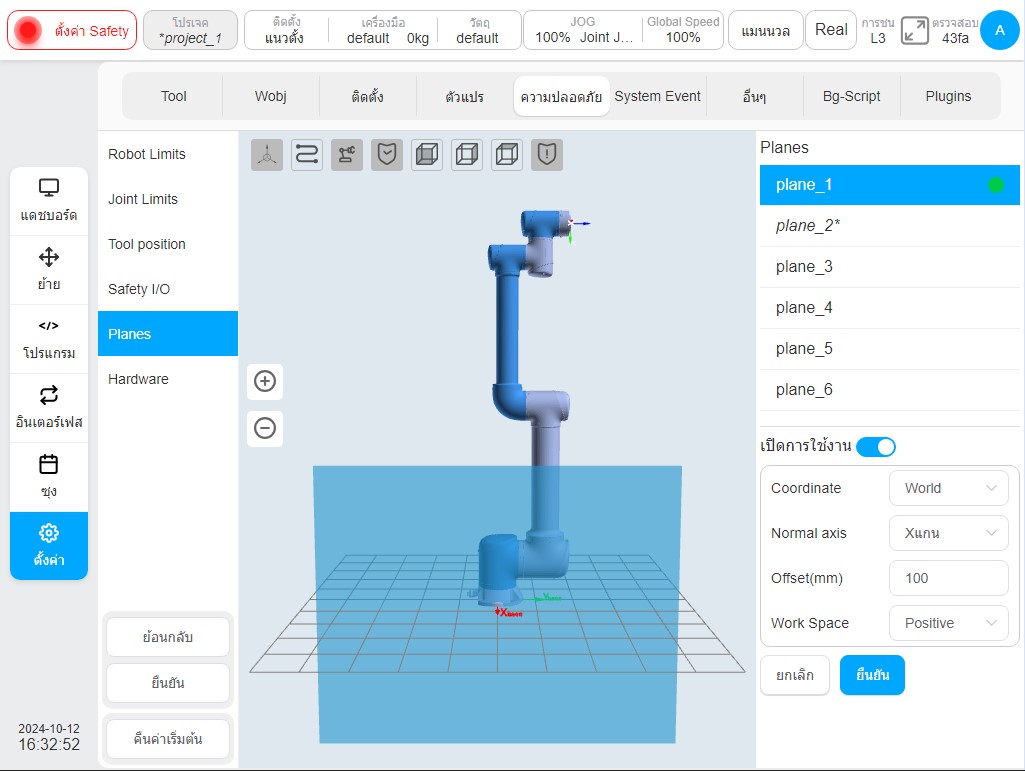
เลือกระบบพิกัดอ้างอิง ซึ่งอาจเป็นระบบพิกัดโลก ระบบพิกัดฐาน หรือระบบพิกัดชิ้นงานที่กำหนดไว้ในการตั้งค่า เลือกแกนใดแกนหนึ่ง (X, Y, Z) ของระบบพิกัดอ้างอิงเป็นแกนปกติของระนาบเสมือน และตั้งค่าระยะออฟเซ็ตตามแกน ค่าบวกของระยะออฟเซ็ตแสดงถึงระยะออฟเซ็ตบวกตามแกนพิกัด และค่าลบแสดงถึงระยะออฟเซ็ตลบตามแกนพิกัด ด้วยวิธีนี้ ระนาบจะถูกกำหนด จากนั้นพื้นที่กิจกรรมที่มีประสิทธิภาพของแขนหุ่นยนต์จะถูกเลือกให้ด้านนั้นของระนาบ ตัวอย่างเช่น หากเลือกระบบพิกัดอ้างอิงเป็นระบบพิกัดฐาน แกน Z จะถูกเลือกเป็นแกนปกติ และตั้งค่าระยะออฟเซ็ตเป็น 600 มม. จากนั้นระนาบเสมือนจะถูกสร้างขึ้นโดยเลื่อนระนาบ XoY ของระบบพิกัดฐานไปยังแกน Z ในทิศทางบวก 600 มม.
รูปต่อไปนี้แสดงการโต้ตอบที่เกี่ยวข้อง เลือกระนาบ คลิกปุ่ม 'เปิดใช้งาน' และ 'แก้ไข' เลือกระบบพิกัดอ้างอิง แกนปกติ ป้อนระยะออฟเซ็ต เลือกพื้นที่ที่มีประสิทธิภาพ คลิกปุ่ม 'ตกลง' เพื่อกำหนดขอบเขตเสมือน ลูกศรที่แสดงบนระนาบเสมือนระบุพื้นที่ใช้งานของหุ่นยนต์
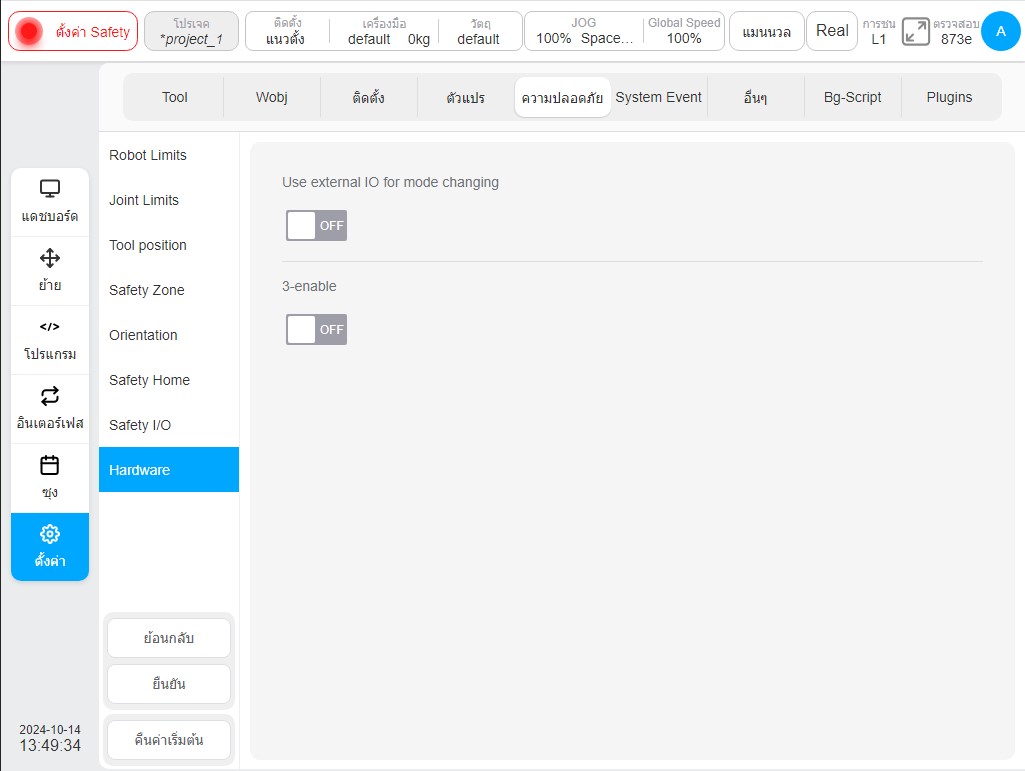
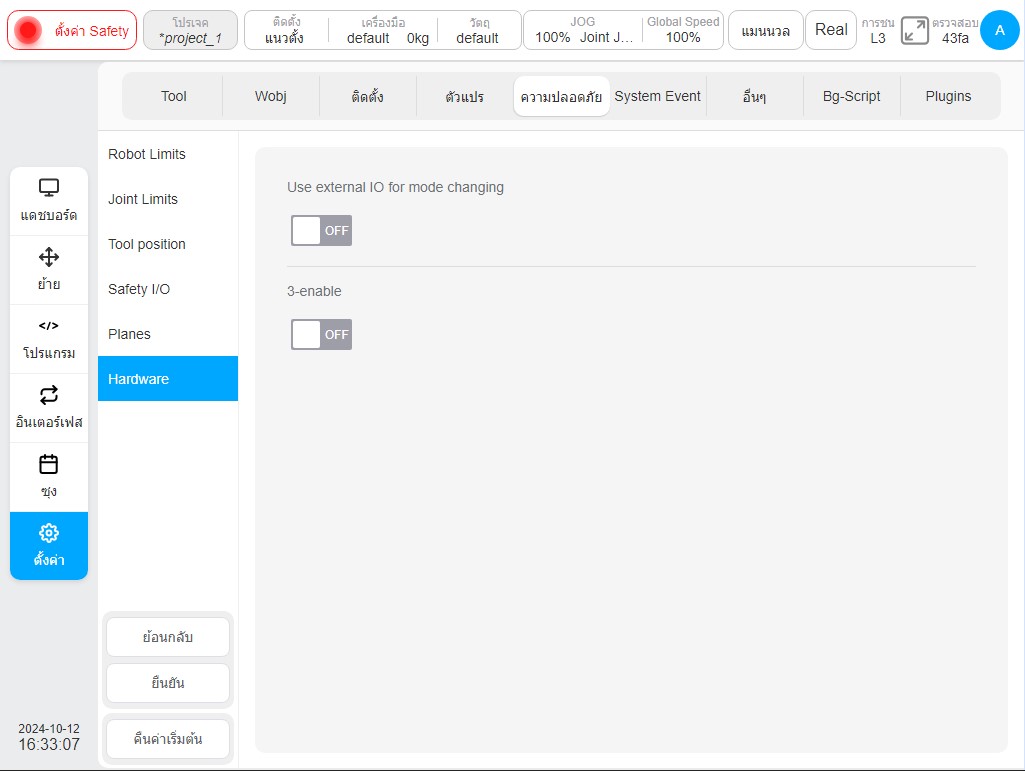
ฮาร์ดแวร์#
รวมถึงการเปิดใช้งาน IO ภายนอกสำหรับการสลับโหมดและอินพุตการเปิดใช้งานสามตำแหน่ง
เปิดใช้งาน IO ภายนอกสำหรับการสลับโหมด: เมื่อเปิดใช้งานรายการนี้ การสลับโหมดด้วยตนเองสามารถทำได้ผ่าน IO ภายนอก ฟังก์ชันการสลับโหมดบนแถบสถานะของอินเทอร์เฟซไม่ถูกต้อง
อินพุตการเปิดใช้งานสามตำแหน่ง: เมื่อเปิดใช้งานรายการนี้ ในระหว่างที่หุ่นยนต์อยู่ในโหมดด้วยตนเอง หุ่นยนต์สามารถเคลื่อนที่ได้เฉพาะเมื่อสวิตช์สามตำแหน่งบนจี้สอนอยู่ในตำแหน่งกลาง เมื่อสวิตช์สามตำแหน่งอยู่ในตำแหน่งที่ไม่ใช่ตำแหน่งกลางในเวลาใดก็ตามระหว่างการเคลื่อนไหวของหุ่นยนต์ ฟังก์ชันหยุดของหุ่นยนต์จะทำงาน
DucoSafety V2.0#
ดูการกำหนดค่าความปลอดภัย#
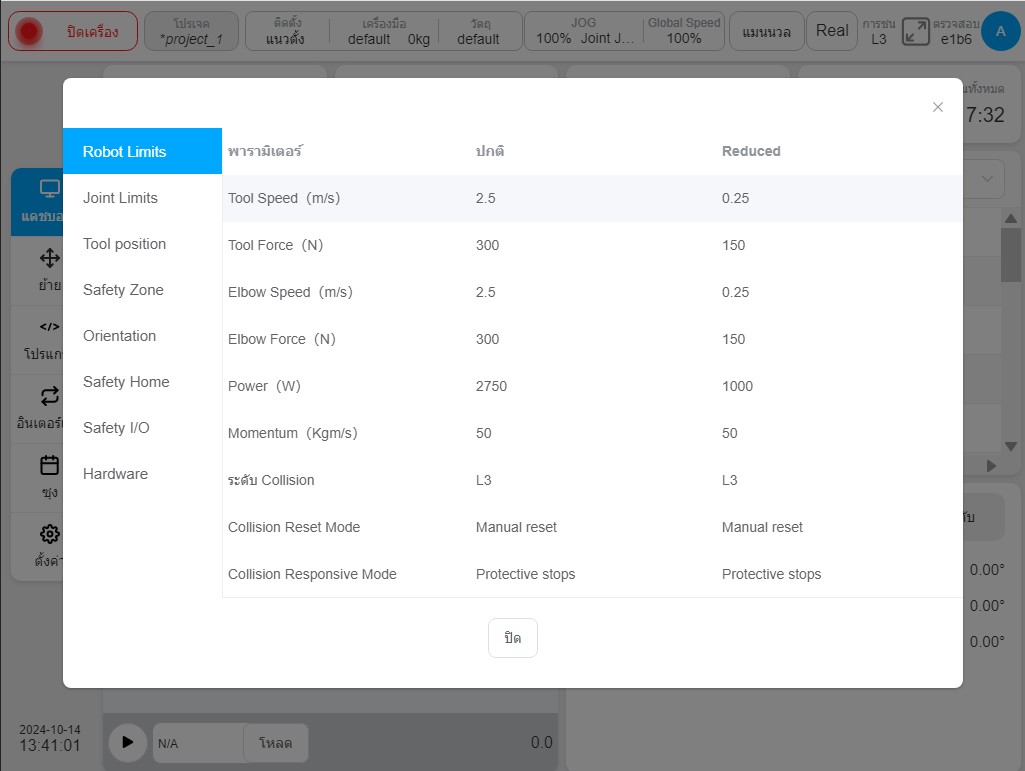
คลิกปุ่ม 'การตรวจสอบความปลอดภัย' บนแถบสถานะ กล่องโต้ตอบต่อไปนี้จะปรากฏขึ้นเพื่อดูพารามิเตอร์การกำหนดค่าความปลอดภัยที่เปิดใช้งานอยู่ในปัจจุบัน
ผู้ใช้ยังสามารถดูพารามิเตอร์การกำหนดค่าความปลอดภัยได้ในหน้าการตั้งค่า - การตั้งค่าความปลอดภัย
การเปลี่ยนแปลงการกำหนดค่าความปลอดภัย#
ก่อนที่จะเปลี่ยนแปลงการกำหนดค่าความปลอดภัย ผู้ใช้ต้องใช้รหัสผ่านเพื่อปลดล็อกหุ่นยนต์ เข้าสู่หน้า 'การตั้งค่า' - 'การกำหนดค่าความปลอดภัย' คลิกปุ่ม 'ปลดล็อก' ที่ด้านล่างซ้าย ปลดล็อกได้เฉพาะในกรณีที่ไฟฟ้าดับเท่านั้น ป้อนรหัสผ่าน (รหัสผ่านการเข้าสู่ระบบของผู้ใช้ที่เข้าสู่ระบบในปัจจุบัน) จากนั้นเข้าสู่โหมดกำหนดค่าพารามิเตอร์ความปลอดภัยหลังจากผ่านการตรวจสอบแล้ว ในขณะนี้ พื้นที่แสดงสถานะบนแถบสถานะจะแสดง 'การกำหนดค่าพารามิเตอร์ความปลอดภัย'
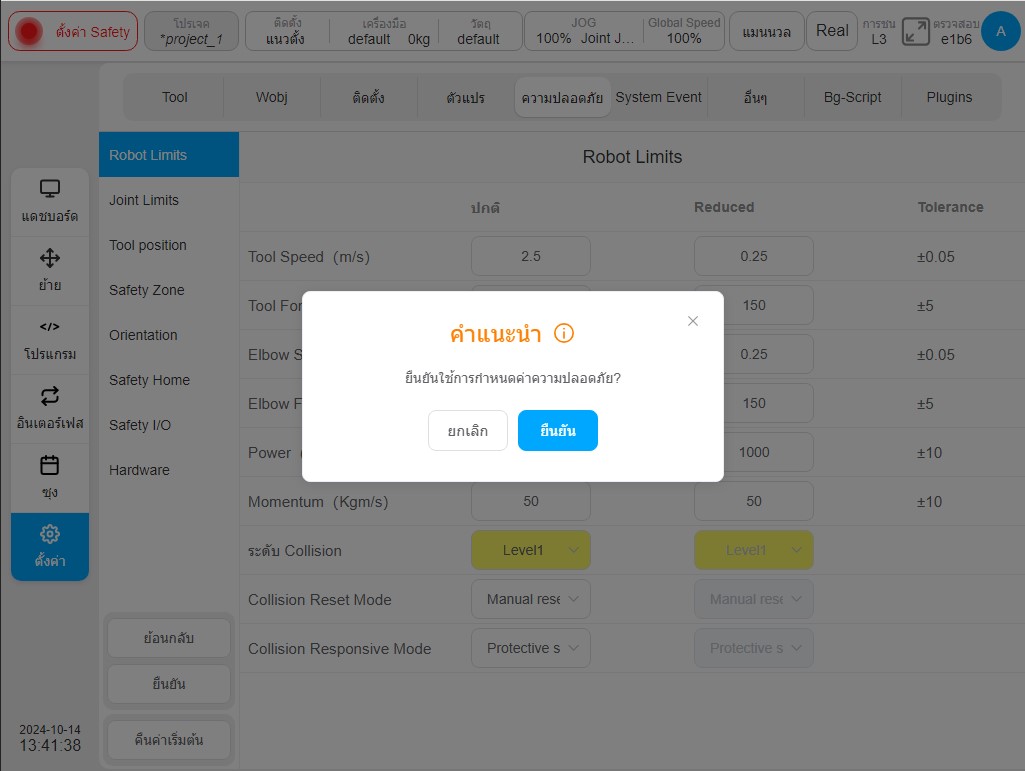
หลังจากคลิกปุ่ม 'ยืนยัน' กล่องพร้อมท์สำหรับการโหลดพารามิเตอร์ความปลอดภัยจะปรากฏขึ้น ดังที่แสดงในรูปภาพ
หลังจากกำหนดค่าพารามิเตอร์ความปลอดภัยแล้ว ระบบจะแสดงพารามิเตอร์ความปลอดภัยที่กำหนดค่าไว้ในกล่องโต้ตอบเพื่อให้คุณตรวจสอบ ตรวจสอบและยืนยันรูปภาพต่อไปนี้ คลิกปุ่ม "ตกลง" เพื่อตั้งค่าพารามิเตอร์ความปลอดภัย หลังจากกำหนดค่าสำเร็จ การตรวจสอบความปลอดภัยเหนือแถบสถานะจะเปลี่ยนแปลง
คำอธิบายพารามิเตอร์ด้านความปลอดภัย#
ส่วนนี้จะอธิบายพารามิเตอร์การกำหนดค่าด้านความปลอดภัยของหุ่นยนต์
โหมดปลอดภัย#
โหมดปกติ:โหมดปลอดภัยจะเปิดใช้งานตามค่าเริ่มต้น
โหมดลดขนาด:โหมดนี้สามารถเปิดใช้งานได้โดยใช้อินพุต IO เพื่อความปลอดภัย
โหมดการกู้คืน:เมื่อพารามิเตอร์การเคลื่อนไหวจริงของหุ่นยนต์เกินขีดจำกัดความปลอดภัย ส่งผลให้หุ่นยนต์หยุด โหมดการกู้คืนจะเปิดใช้งาน และผู้ใช้สามารถเคลื่อนย้ายหุ่นยนต์ภายในขีดจำกัดความปลอดภัยได้
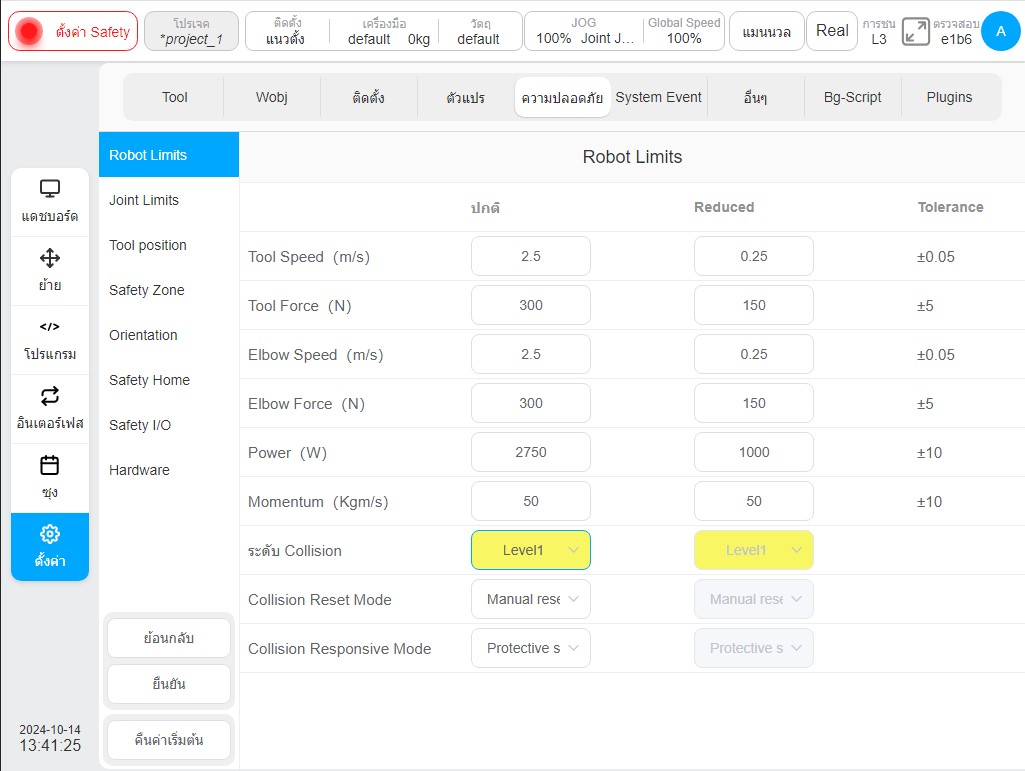
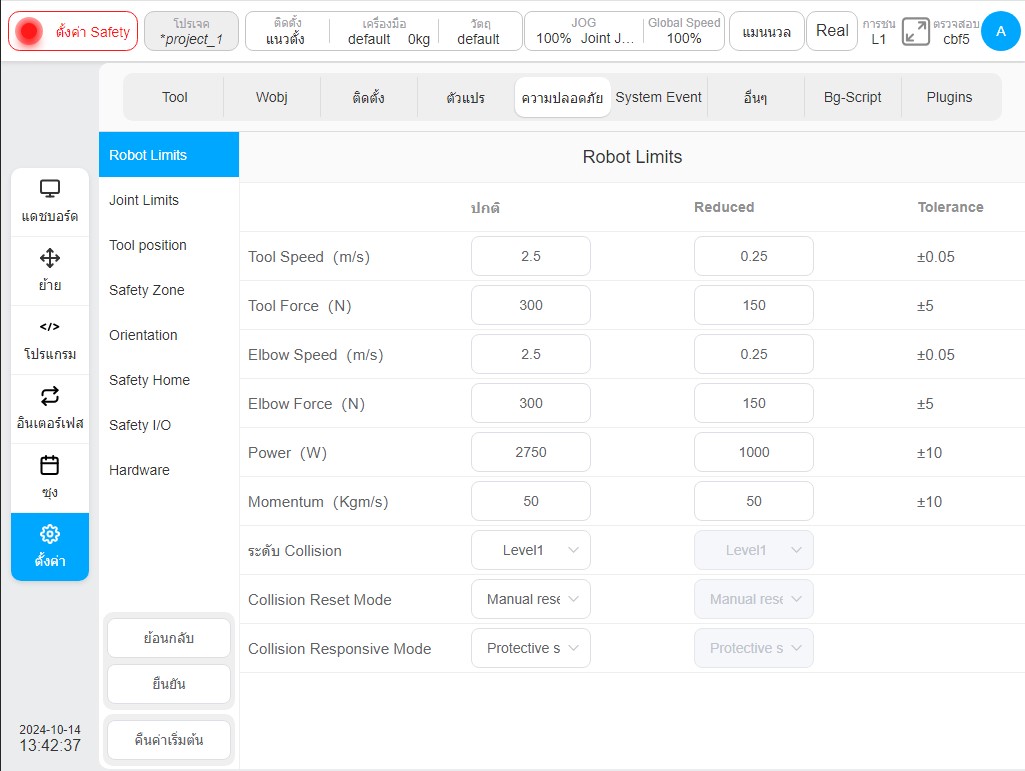
พารามิเตอร์ความปลอดภัยของหุ่นยนต์#
พารามิเตอร์ของหุ่นยนต์ใช้เพื่อจำกัดการเคลื่อนไหวทั่วไปของหุ่นยนต์ ผู้ใช้สามารถกำหนดค่าพารามิเตอร์ในโหมดปกติและโหมดลดได้
Maximum End Speed จำกัดความเร็วสูงสุดของปลายหุ่นยนต์
Maximum End Force จำกัดแรงสูงสุดที่ใช้ภายนอกที่ปลายหุ่นยนต์
Maximum Elbow Speed จำกัดความเร็วสูงสุดของข้อศอกของหุ่นยนต์
Maximum Elbow Force จำกัดแรงภายนอกสูงสุดที่ใช้โดยข้อศอกของหุ่นยนต์
Power จำกัดงานเชิงกลสูงสุดที่ทำโดยหุ่นยนต์จากภายนอก และภาระของหุ่นยนต์ถือเป็นส่วนหนึ่งของตัวหุ่นยนต์
Maximum Momentum จำกัดโมเมนตัมสูงสุดของเอาต์พุตของหุ่นยนต์ และภาระของหุ่นยนต์ถือเป็นส่วนหนึ่งของตัวหุ่นยนต์
ระดับการตรวจจับการชน ความไวของหุ่นยนต์ในการตรวจจับการชนกับโลกภายนอก ยิ่งระดับสูง ความไวก็จะยิ่งสูง
โหมดรีเซ็ตการชน วิธีการรีเซ็ตหุ่นยนต์หลังการชน
โหมดตอบสนองการชน วิธีการตอบสนองหุ่นยนต์หลังการชน
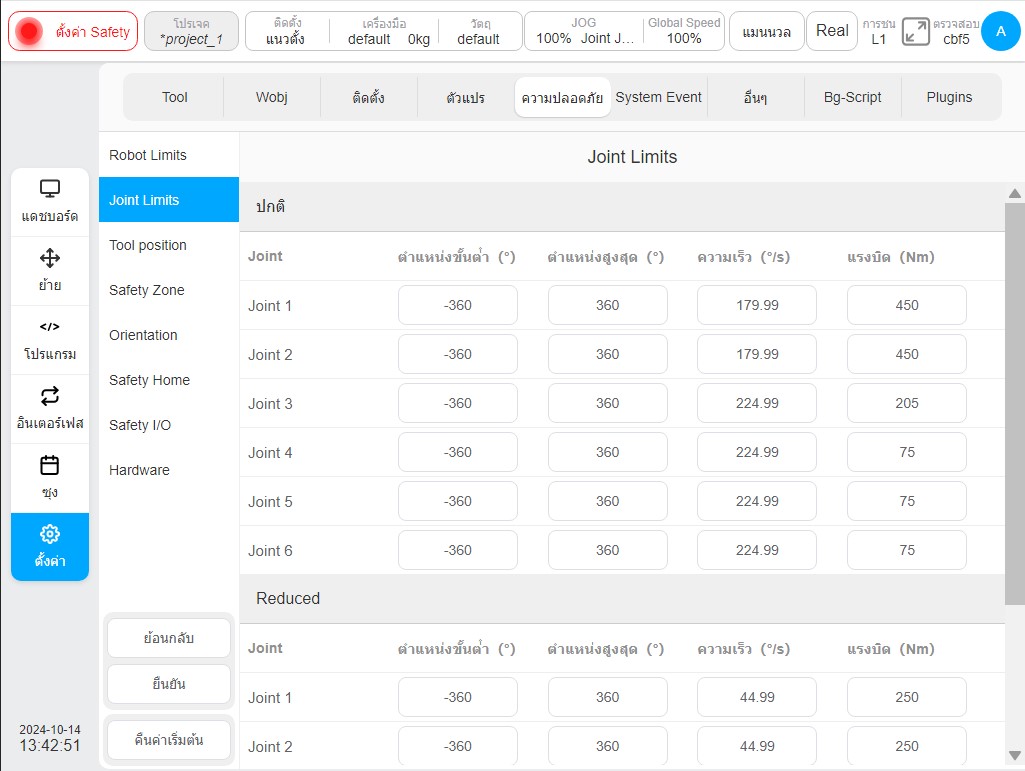
พารามิเตอร์ความปลอดภัยของข้อต่อ#
พารามิเตอร์จำกัดข้อต่อใช้เพื่อจำกัดช่วงตำแหน่ง ความเร็วสูงสุด และแรงบิดสูงสุดของข้อต่อแต่ละข้อของหุ่นยนต์ ผู้ใช้สามารถกำหนดค่าพารามิเตอร์ได้ทั้งในโหมดปกติและโหมดลดขนาด
ช่วงตำแหน่ง:กำหนดตำแหน่งต่ำสุดและสูงสุดของข้อต่อแต่ละข้อ
ความเร็วสูงสุด:กำหนดความเร็วเชิงมุมสูงสุดของข้อต่อแต่ละข้อ
แรงบิดสูงสุด:กำหนดแรงบิดสูงสุดของข้อต่อแต่ละข้อ
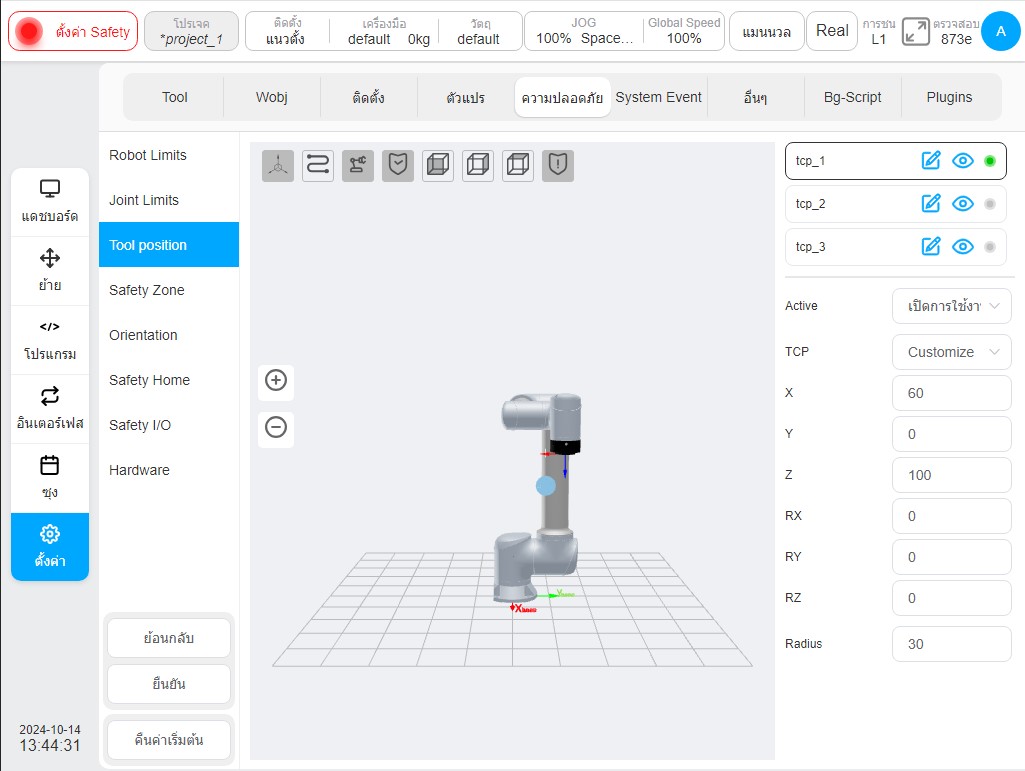
TCP ด้านความปลอดภัยและเครื่องมือ#
ระบบความปลอดภัยสามารถกำหนดค่าออฟเซ็ต TCP ได้สามชุด ซึ่งเมื่อกำหนดค่าแล้ว หุ่นยนต์จะใช้ในการติดตามความเร็วและการติดตามตำแหน่ง ตำแหน่งและความเร็ว TCP ใดๆ ที่เกินค่าการตั้งค่าความปลอดภัยจะทำให้เกิดการละเมิดความปลอดภัย
การติดตามความเร็วคือความเร็วเชิงเส้นสูงสุดของศูนย์ TCP ด้านความปลอดภัยของหุ่นยนต์ในอวกาศใน 'พารามิเตอร์ความปลอดภัยของหุ่นยนต์' ในขณะที่การติดตามตำแหน่งเรียกอีกอย่างว่า 'พื้นที่ปลอดภัย' สามารถตั้งค่า TCP ด้านความปลอดภัยได้สามชุดในขณะที่มีสองวิธีในการกำหนด TCP โดยเลือกระบบพิกัดเครื่องมือที่กำหนดไว้ในตัวแปรทั่วไปหรือปรับแต่งค่าของระบบพิกัดอินพุต เมื่อใช้ระบบพิกัดเครื่องมือที่กำหนดไว้ล่วงหน้า ระบบพิกัดเครื่องมือจะถูกเลือกและค่าของระบบพิกัดเครื่องมือจะแสดงในกล่องอินพุต X, Y, Z หากแก้ไขค่า X, Y, Z ระบบพิกัดจะถูกปรับแต่ง หากค่าของระบบพิกัดที่สอดคล้องกันในตัวแปรทั่วโลกถูกปรับเปลี่ยนและไม่ตรงกับค่าของระบบพิกัดที่ใช้ในการตั้งค่าความปลอดภัยปัจจุบัน ไอคอนแจ้งเตือน '!' จะปรากฏขึ้น เมื่อเลือก 'ข้อมูลอินพุตที่กำหนดเอง' ค่าของ X, Y, Z, Rx, Ry, Rz และรัศมีลูกบอลของซองจดหมายจะถูกแก้ไขโดยตรง
TCP ความปลอดภัยแต่ละรายการสามารถตั้งค่าให้ปิดใช้งาน เปิดใช้งานตลอดเวลา เปิดใช้งานโหมดอัตโนมัติ การกำหนดค่าการรวมความปลอดภัย 1 การกำหนดค่าการรวมความปลอดภัย 2 โดยรวมมีเงื่อนไขการเปิดใช้งานที่แตกต่างกันห้าแบบ เมื่อปิดใช้งาน TCP ทั้งสามรายการ ระบบควบคุมความปลอดภัยจะตั้งค่าเริ่มต้นเป็นระบบพิกัดแบบมีปีกที่มีรัศมีลูกบอล 50 มม. สถานะการกำหนดค่า TCP จะแสดงในรายการการกำหนดค่า TCP หากปิดใช้งาน TCP บางตัว สถานะที่เกี่ยวข้องจะแสดงเป็นสีเทา TCP ความปลอดภัยที่กำหนดค่าสามารถแสดงระบบพิกัดและทรงกลมซองจดหมายในพื้นที่แสดงผล 3 มิติ และสามารถส่งชื่อ TCP ที่เกี่ยวข้องด้วย  ไอคอนจะแสดงและซ่อนอยู่ คลิกถัดจากชื่อ TCP
ไอคอนจะแสดงและซ่อนอยู่ คลิกถัดจากชื่อ TCP  เพื่อเปลี่ยนชื่อ TCP เริ่มต้น TCP ความปลอดภัยที่ไม่ได้ปิดใช้งานจะแสดง
เพื่อเปลี่ยนชื่อ TCP เริ่มต้น TCP ความปลอดภัยที่ไม่ได้ปิดใช้งานจะแสดง  มิฉะนั้นจะแสดง
มิฉะนั้นจะแสดง 
โซนความปลอดภัย#
ประเภทของคำจำกัดความของโซนความปลอดภัย ได้แก่ ระนาบ สี่เหลี่ยม และทรงกระบอก ผู้ใช้สามารถตั้งค่าโซนพื้นที่อิสระได้สูงสุด 6 โซน คลิกไอคอน ถัดจากชื่อโซนความปลอดภัยเพื่อแสดงหรือซ่อนโซนความปลอดภัยที่กำหนดค่าไว้ในโซนแสดงผล 3 มิติ และสามารถคลิกไอคอน ถัดจากชื่อโซนความปลอดภัย (เช่น ชื่อเริ่มต้น zone_1) เพื่อเปลี่ยนชื่อ จะปรากฏขึ้นหากโซนความปลอดภัยไม่ได้ถูกปิดใช้งาน มิฉะนั้น จะปรากฏขึ้น
การกำหนดค่าการเปิดใช้งานโซนความปลอดภัย ได้แก่ ปิดใช้งาน เปิดใช้งานเสมอ โหมดอัตโนมัติเปิดใช้งาน การกำหนดค่ากลุ่มความปลอดภัย 1 และการกำหนดค่ากลุ่มความปลอดภัย 2
การตอบสนองขอบเขตของโซนความปลอดภัยหมายถึงการตอบสนองของหุ่นยนต์ที่เข้าสู่โซนความปลอดภัยจากภายนอกและเคลื่อนตัวเกินขอบเขตจากภายใน มีโหมดการตอบสนองสองโหมด ได้แก่ จำกัดการเคลื่อนที่เกินขอบเขตและกระตุ้นโหมดลดขนาดเมื่อเข้าสู่โซน เมื่อขีดจำกัดการเลือกเกินขอบเขต จะมีการอธิบายการตอบสนองของหุ่นยนต์ที่เคลื่อนที่เกินขอบเขต เมื่อเลือกโหมดลดทริกเกอร์ จะมีการอธิบายการตอบสนองของหุ่นยนต์ที่เข้าสู่โซนจากภายนอก และโหมดปกติจะกลับคืนมาเมื่อหุ่นยนต์ออกจากโซน
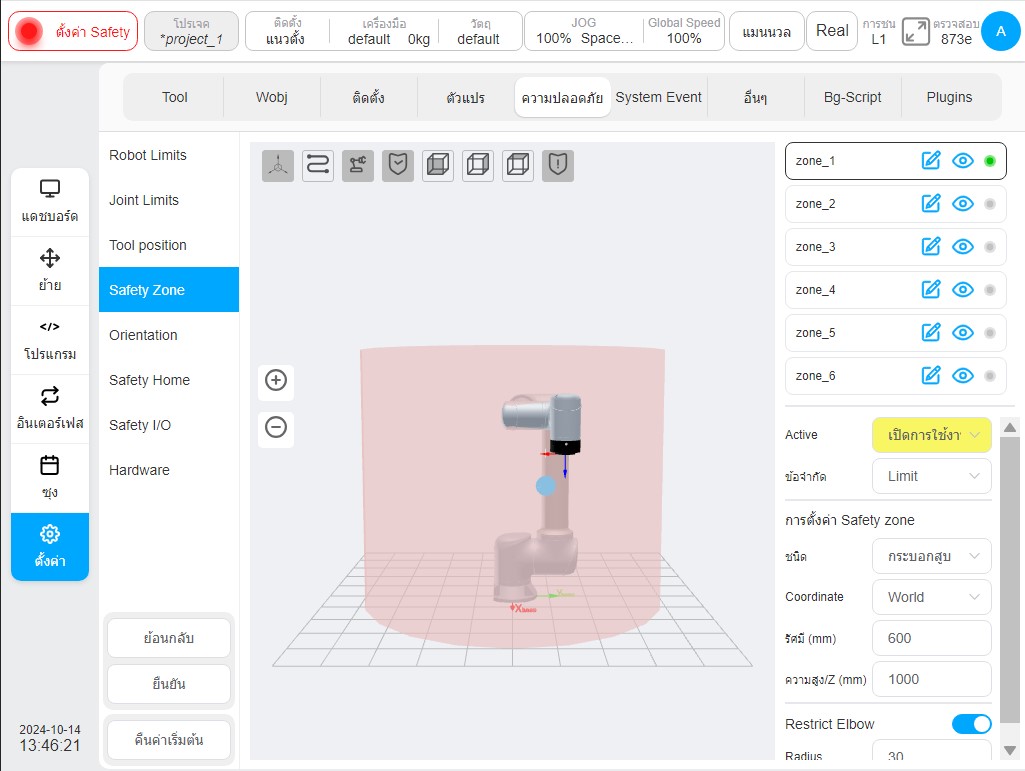
โซนอวกาศสามารถตั้งค่าให้รวมขีดจำกัดข้อศอก โดยกำหนดช่วงอวกาศของข้อศอกในรูปแบบรัศมีทรงกลม
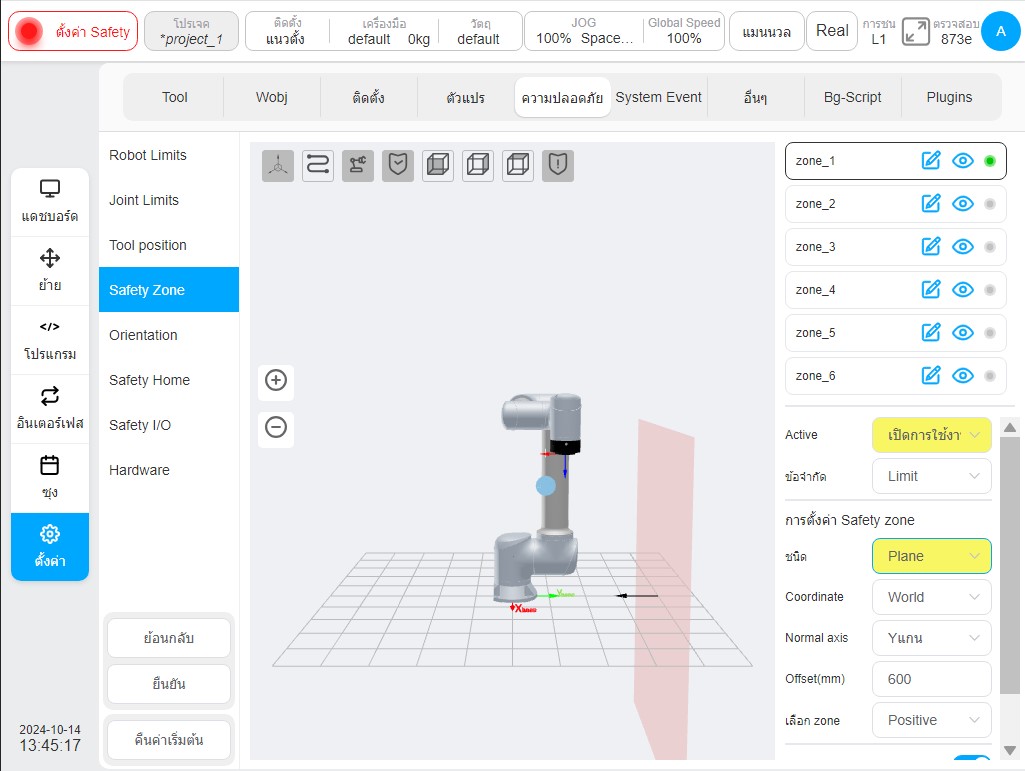
เมื่อประเภทโซนการกำหนดค่าเป็นระนาบ การอ้างอิงของโซนระนาบจะขึ้นอยู่กับระบบพิกัดโลก/ฐาน/ชุดระบบพิกัดชิ้นงาน และระนาบจะถูกกำหนดโดยการตั้งค่าออฟเซ็ตปกติและปกติของระนาบ การตั้งค่าระนาบสามารถตั้งค่าให้มีผลได้โดยเลือกภูมิภาค และทิศทางที่สอดคล้องกันจะแสดงผ่านลูกศรสีดำในโซน 3 มิติ
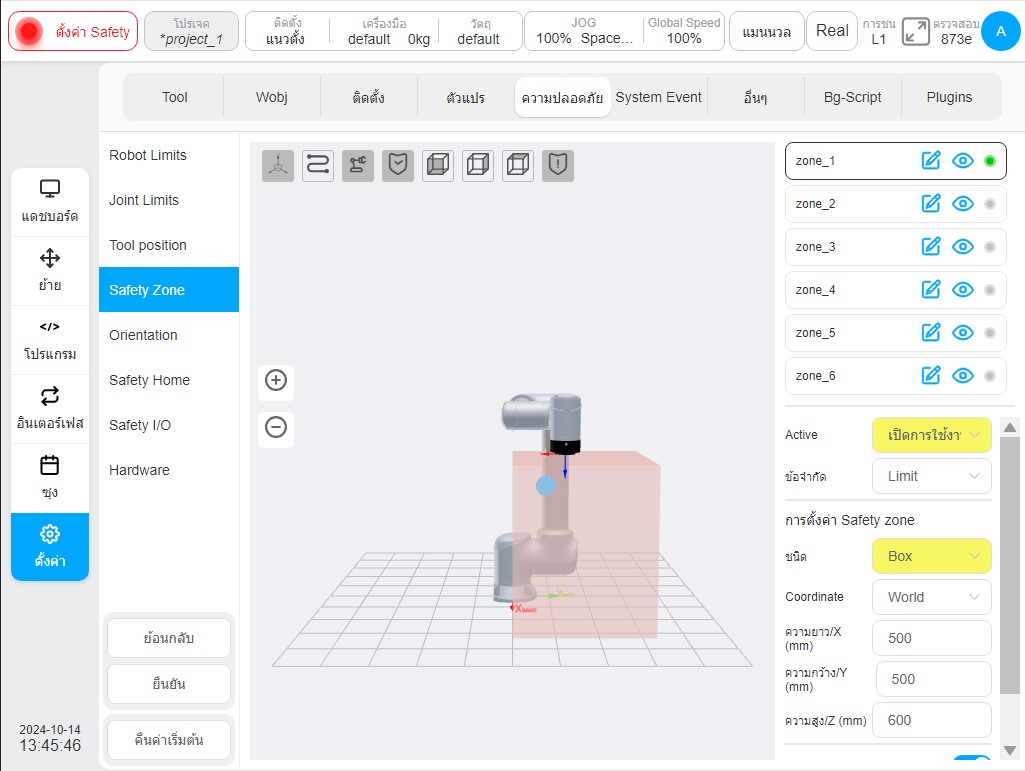
เมื่อประเภทโซนการกำหนดค่าเป็นลูกบาศก์อวกาศ พื้นฐานการตั้งค่าของโซนลูกบาศก์จะอิงตามระบบพิกัดโลก/ฐาน/ชุดระบบพิกัดชิ้นงาน และระบบพิกัดชิ้นงานจะใช้เป็นจุดมุมของลูกบาศก์ โดยมีทิศทางแกนพิกัดสามแกนสอดคล้องกับความยาว (X), ความกว้าง (Y) และความสูง (Z) ตามลำดับ ความยาว ความกว้าง และความสูงจะอยู่ในช่วง -3000 มม. ถึง 3000 มม.
เมื่อประเภทโซนการกำหนดค่าเป็นทรงกระบอกอวกาศ การอ้างอิงการตั้งค่าจะอิงตามระบบพิกัดโลก/ฐาน/ชุดระบบพิกัดชิ้นงาน โดยระบบพิกัดชิ้นงานเป็นจุดศูนย์กลางของระนาบวงกลม ทิศทาง Z จะชี้ไปที่ทิศทางความสูง และสามารถตั้งค่ารัศมีและความสูงได้ รัศมีจะอยู่ในช่วงตั้งแต่ 0 ถึง 3000 มม. และความสูงจะอยู่ในช่วงตั้งแต่ -3000 มม. ถึง 3000 มม.
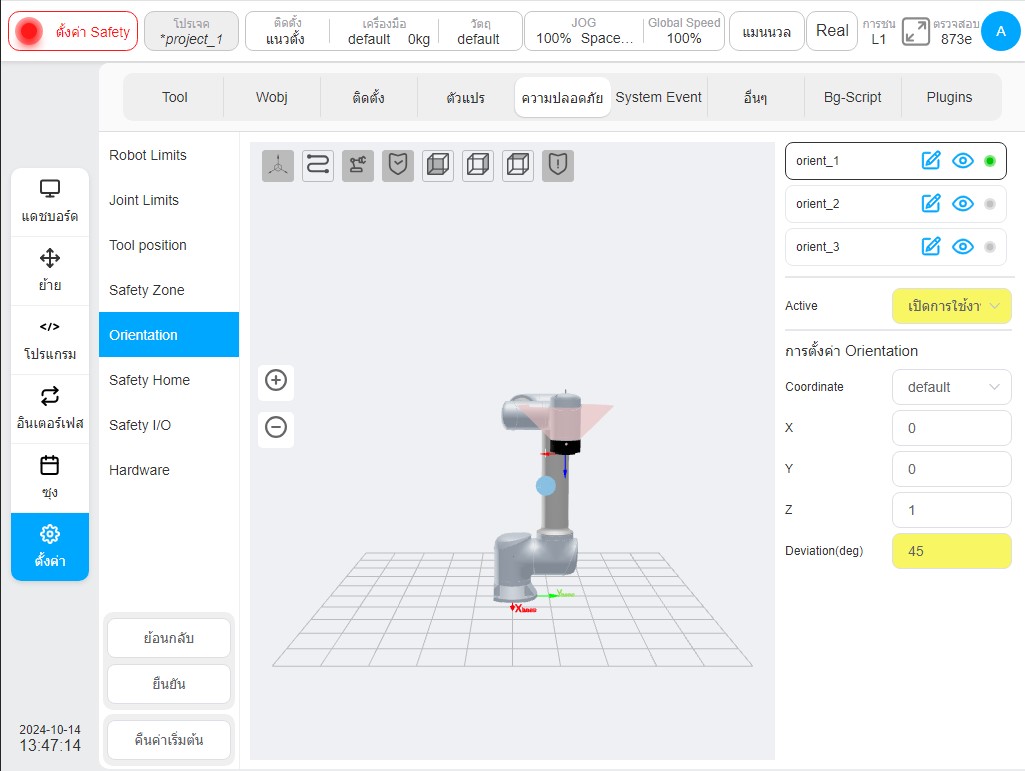
โซนท่าทางปลอดภัย#
การตั้งค่าโซนท่าทางปลอดภัย โซนท่าทางหมายถึงการสร้างมุมกรวยรอบเวกเตอร์ทิศทางในระบบพิกัดฐานของหุ่นยนต์ การจำกัดท่าทางจำกัดเฉพาะแกน Z ของ TCP ของหุ่นยนต์ให้เข้ากับโซนท่าทาง ผู้ใช้สามารถตั้งค่าโซนท่าทางได้สูงสุด 3 โซน โซนท่าทางเดียวสามารถแสดงหรือซ่อนได้โดยคลิกไอคอน ถัดจากชื่อทางด้านขวาของโซนท่าทาง ซึ่งตั้งค่าเป็นค่าเริ่มต้นให้แสดง ไอคอน หลังชื่อสามารถคลิกเพื่อแก้ไขชื่อโซนท่าทาง จะแสดงขึ้นหากไม่ได้ปิดใช้งานโซนท่าทาง มิฉะนั้น จะถูกปิดใช้งาน
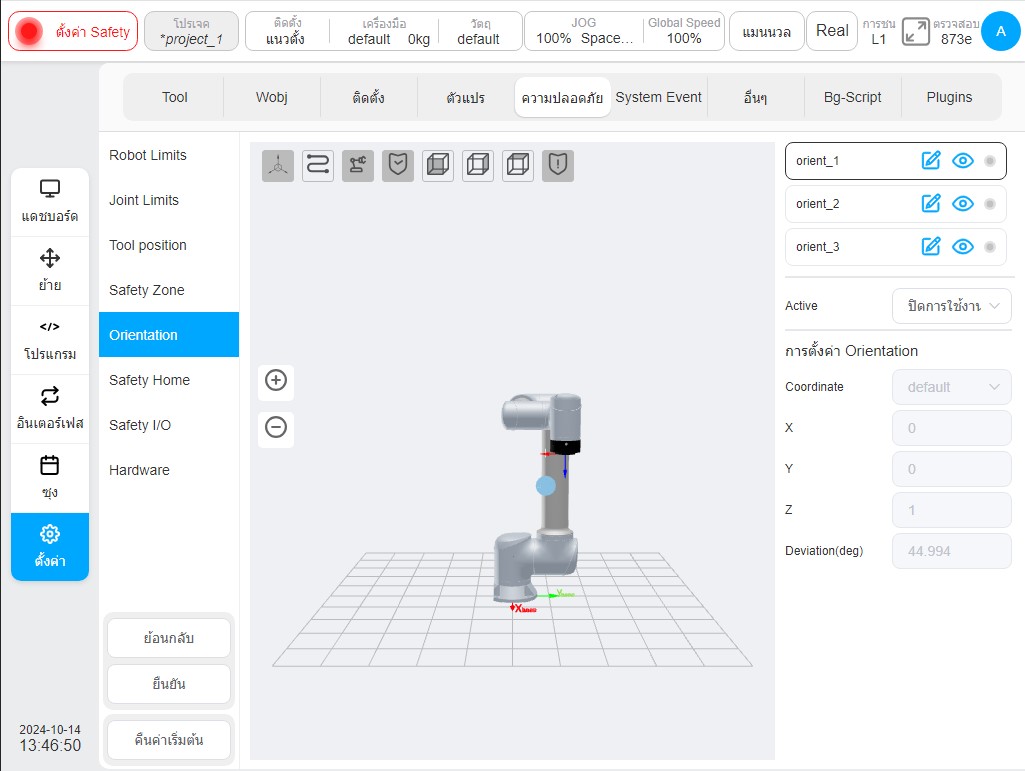
โซนท่าทางปลอดภัยสามารถเปิดใช้งานได้ 5 โหมด ได้แก่ ปิดใช้งาน เปิดใช้งานเสมอ โหมดอัตโนมัติเปิดใช้งาน การกำหนดค่ากลุ่มความปลอดภัย 1 และการกำหนดค่ากลุ่มความปลอดภัย 2 โซนท่าทางปลอดภัยแตกต่างจากโซนความปลอดภัยตรงที่จำกัดเฉพาะทิศทางแกน Z ของ TCP และมีโหมดตอบสนองเพียงโหมดเดียวที่ทริกเกอร์การหยุดป้องกันหลังจากเกินโซน
มีสามวิธีในการกำหนดระบบพิกัดอ้างอิงสำหรับโซนท่าทางปลอดภัย: กำหนดเอง จับท่าทาง TCP ปัจจุบันและกำหนดผ่านระบบพิกัดชิ้นงานที่กำหนดไว้ล่วงหน้า เมื่อเลือกกำหนดเอง ให้แก้ไขค่าเวกเตอร์ทิศทาง X, Y, Z ด้วยตนเอง ซึ่งอธิบายค่าในระบบพิกัดฐานของหุ่นยนต์ เมื่อเลือกท่าทาง TCP ปัจจุบัน ทิศทางแกน z ของ TCP ปัจจุบันจะถูกใช้เป็นทิศทางอ้างอิงของโซนท่าทาง และทิศทางจะถูกแปลงเป็นระบบพิกัดฐานของหุ่นยนต์เพื่ออธิบายทิศทางเวกเตอร์ X, ทิศทางเวกเตอร์ Y, ทิศทางเวกเตอร์ Z หากแก้ไขค่าด้วยตนเอง ค่าดังกล่าวจะกลายเป็นโหมดกำหนดเอง เมื่อกำหนดโดยระบบพิกัดชิ้นงาน ทิศทางแกน Z ของระบบพิกัดชิ้นงานจะถูกนำมาใช้เป็นทิศทางอ้างอิงของโซนท่าทางและแปลงเป็นระบบพิกัดฐานของหุ่นยนต์ ค่าจะเปลี่ยนไปเป็นโหมดกำหนดเองหลังจากปรับเปลี่ยนด้วยตนเอง
หากทิศทางของระบบพิกัดชิ้นงานมีการเปลี่ยนแปลงจากภายนอก ไอคอนเตือน จะปรากฏขึ้นที่ระบบพิกัดอ้างอิง มุมเบี่ยงเบนของโซนจะอยู่ระหว่าง 5 ถึง 180 องศา ตัวอย่างเช่น:
ความปลอดภัยที่บ้าน#
สำหรับการตั้งค่า 'ความปลอดภัยที่บ้าน' การตรวจสอบ 'ความปลอดภัยที่บ้าน' จะซิงโครไนซ์การตั้งค่าตำแหน่งที่บ้านในหน้าการตั้งค่า 'อื่นๆ' หากตำแหน่งในการตั้งค่า 'ความปลอดภัยที่บ้าน' แตกต่างจากตำแหน่งที่บ้านในการตั้งค่า 'อื่นๆ' ไอคอนเตือน จะปรากฏขึ้นภายใต้การตั้งค่า 'ซิงโครไนซ์ที่บ้าน' หากการตั้งค่าไม่ได้รับการซิงโครไนซ์ ตำแหน่งที่บ้านของระบบจะอยู่ภายใต้การตั้งค่าความปลอดภัย การตั้งค่าของตัวควบคุมความปลอดภัยจะมีผลเหนือกว่าสำหรับจุดที่บ้าน 'กดที่บ้าน' บนอินเทอร์เฟซมือถือและเอาต์พุตของสัญญาณที่บ้านจากพอร์ตอื่นๆ (เช่น พอร์ต 2001) ของหุ่นยนต์ จุดที่บ้านในหน้าการตั้งค่า 'อื่นๆ' ใช้เป็นบันทึกเท่านั้นและไม่ทำหน้าที่เป็นพื้นฐานในการตัดสินจุดที่บ้าน สามารถตั้งค่าเกณฑ์การตรวจสอบของจุดที่บ้านได้ และค่าจะอยู่ระหว่าง 1 ถึง 5°
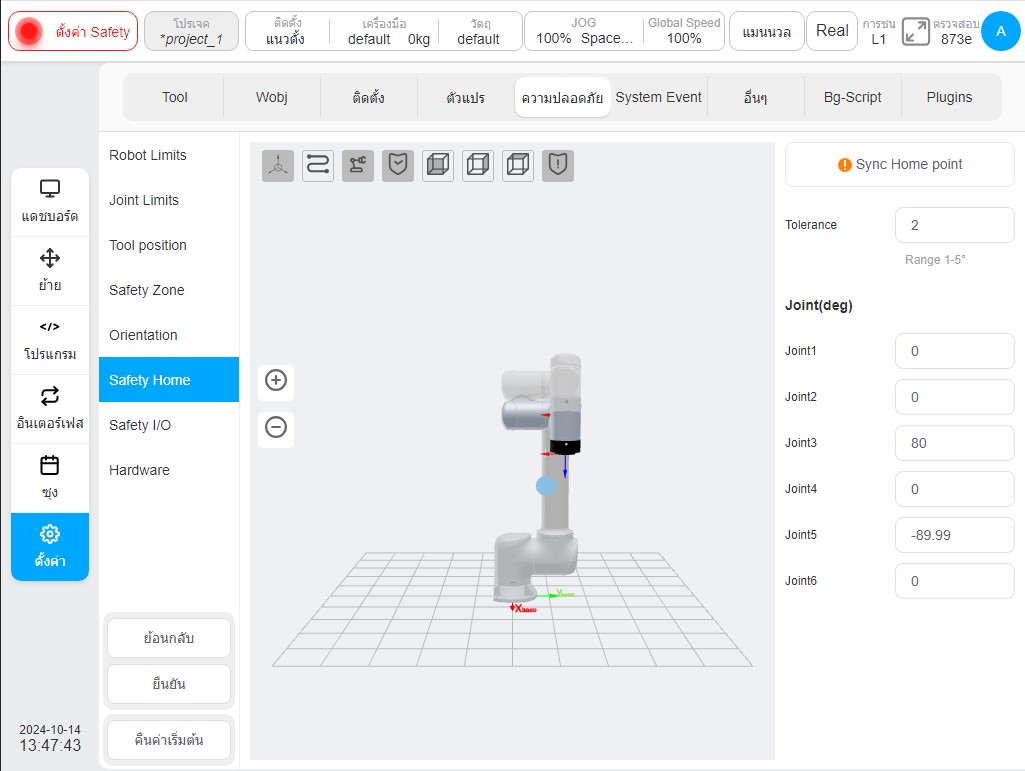
เมื่อเลือกตำแหน่งโฮมซิงโครไนซ์ มุมข้อต่อของตำแหน่งโฮมจะแสดงขึ้น และโมเดลหุ่นยนต์ในพื้นที่แสดงโมเดล 3 มิติจะรีเฟรชไปยังตำแหน่งที่สอดคล้องกัน
เมื่อตั้งค่าตำแหน่งโฮมที่ปลอดภัยและกำหนดค่าเอาต์พุตตำแหน่งโฮมใน I/O ที่ปลอดภัยแล้ว (ดูส่วนที่ 6.2.3.8) มุมข้อต่อทั้งหมดของหุ่นยนต์จะอยู่ในช่วงตำแหน่งโฮมที่ตั้งค่าไว้ (ค่าเซ็ตพอยต์-เกณฑ์ ค่าเซ็ตพอยต์ + เกณฑ์) และความเร็วจะใกล้เคียงกับ 0°/s (เพื่อกรองการหมดเวลาของตัวเข้ารหัสตามปกติ) ความเร็วข้อต่อที่ระบบตั้งค่าไว้ล่วงหน้าจะน้อยกว่า 2°/s และคงอยู่เป็นเวลา 500 มิลลิวินาที (ระบบกำหนดไว้ล่วงหน้าและไม่สามารถกำหนดค่าได้) เนื่องจากสัญญาณมาถึงตำแหน่งโฮมเอาต์พุตภายนอกของเอาต์พุตความปลอดภัย
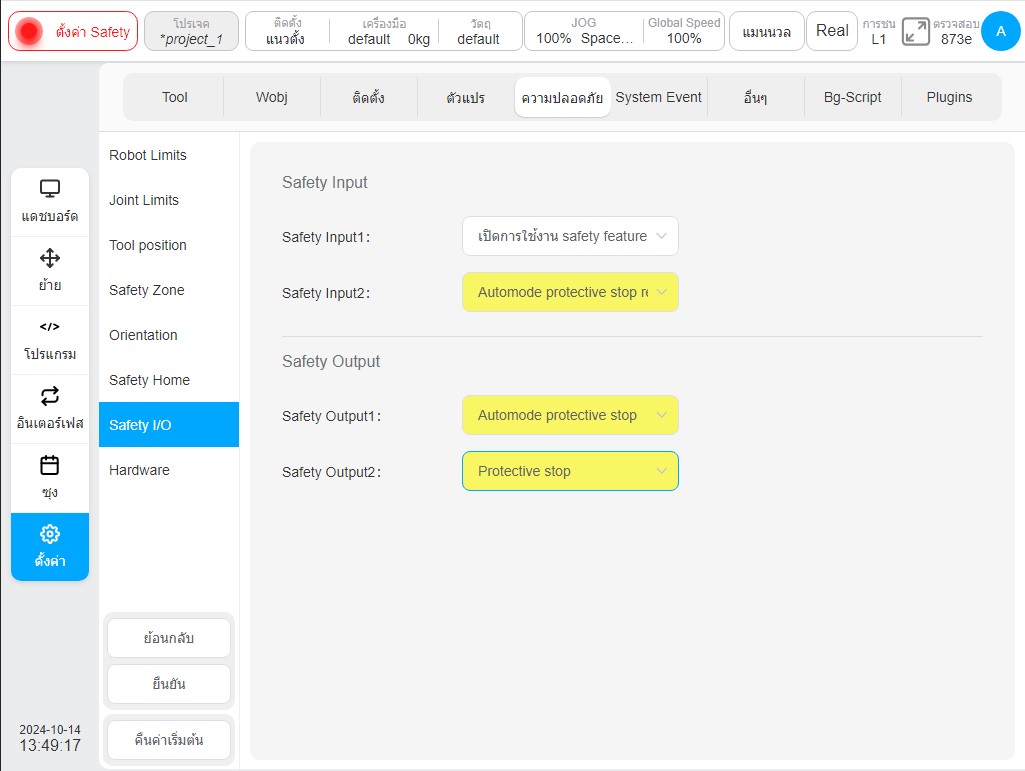
IO ด้านความปลอดภัย#
โมดูล I/O ด้านความปลอดภัยประกอบด้วยพอร์ตอินพุตด้านความปลอดภัยที่กำหนดค่าได้ 2 พอร์ตและพอร์ตเอาท์พุตด้านความปลอดภัยที่กำหนดค่าได้ 2 พอร์ต
คุณสมบัติอินพุตด้านความปลอดภัย ได้แก่:
อินพุตการรีเซ็ตการป้องกัน: เมื่อเกิดการหยุดป้องกัน พอร์ตจะถูกกระตุ้นและหุ่นยนต์จะกลับสู่สถานะปกติ
อินพุตการหยุดป้องกันโหมดอัตโนมัติ: หลังจากกำหนดค่า เมื่อหุ่นยนต์กระตุ้นพอร์ตในโหมดอัตโนมัติ หุ่นยนต์จะหยุดป้องกัน
อินพุตการรีเซ็ตการป้องกันโหมดอัตโนมัติ: เมื่อเกิดการหยุดป้องกันโหมดอัตโนมัติ พอร์ตจะถูกกระตุ้นและหุ่นยนต์จะกลับสู่สถานะปกติ
อินพุตโหมดลด: หลังจากกำหนดค่า พอร์ตนี้จะถูกกระตุ้นและหุ่นยนต์จะเปลี่ยนเป็นโหมดลดความเร็ว หุ่นยนต์จะชะลอความเร็วลงเพื่อให้ถึงขีดจำกัดพารามิเตอร์ด้านความปลอดภัยในโหมดลดความเร็ว
การกำหนดค่าความปลอดภัยแบบผสมผสาน 1/2: เมื่อพอร์ตการกำหนดค่าความปลอดภัยแบบผสมผสาน 1 หรือการกำหนดค่าความปลอดภัยแบบผสมผสาน 2 ถูกกระตุ้น คุณสมบัติความปลอดภัยทั้งหมดที่กำหนดค่าในการกำหนดค่าความปลอดภัยแบบผสมผสาน 1 หรือการกำหนดค่าความปลอดภัยแบบผสมผสาน 2 รวมถึงเครื่องมือความปลอดภัย โซนความปลอดภัย และพื้นที่ท่าทางความปลอดภัย จะถูกกระตุ้นและตรวจสอบ
คุณสมบัติเอาต์พุตความปลอดภัย ได้แก่:
เอาต์พุตการหยุดป้องกัน: พอร์ตนี้จะถูกกระตุ้นเมื่อหุ่นยนต์อยู่ในสถานะหยุดป้องกัน
เอาต์พุตการหยุดป้องกันโหมดอัตโนมัติ: พอร์ตนี้จะถูกกระตุ้นเมื่อหุ่นยนต์อยู่ในสถานะหยุดป้องกันโหมดอัตโนมัติ
เอาต์พุตโหมดลด: พอร์ตนี้จะถูกกระตุ้นเมื่อหุ่นยนต์อยู่ในโหมดลด
ตำแหน่ง HOME: พอร์ตนี้จะถูกกระตุ้นเมื่อหุ่นยนต์อยู่ใกล้ตำแหน่งโฮมที่ปลอดภัย
ฮาร์ดแวร์#
รวมถึง IO ภายนอกที่เปิดใช้งานสำหรับการสลับโหมดและอินพุตเปิดใช้งานสามตำแหน่ง
เปิดใช้งาน IO ภายนอกสำหรับการสลับโหมด:หากเปิดใช้งานรายการนี้ การสลับโหมดด้วยตนเองสามารถทำได้ผ่าน IO ภายนอก ฟังก์ชันการสลับโหมดบนแถบสถานะของอินเทอร์เฟซไม่ถูกต้อง
อินพุตเปิดใช้งานสามตำแหน่ง:เมื่อเปิดใช้งานสิ่งนี้ หากหุ่นยนต์อยู่ในโหมดด้วยตนเอง หุ่นยนต์จะเคลื่อนที่ได้ก็ต่อเมื่อสวิตช์สามตำแหน่งบนจี้สอนอยู่ในตำแหน่งกลาง เมื่อสวิตช์สามตำแหน่งอยู่ในตำแหน่งที่ไม่ใช่ตำแหน่งกลางในเวลาใดก็ตามระหว่างการเคลื่อนไหวของหุ่นยนต์ หุ่นยนต์จะหยุดชั่วคราว