


ย้ายหน้า#
คลิกปุ่ม 'ย้าย' ในแถบนำทางเพื่อเข้าสู่หน้าย้ายดังแสดงในรูปภาพ
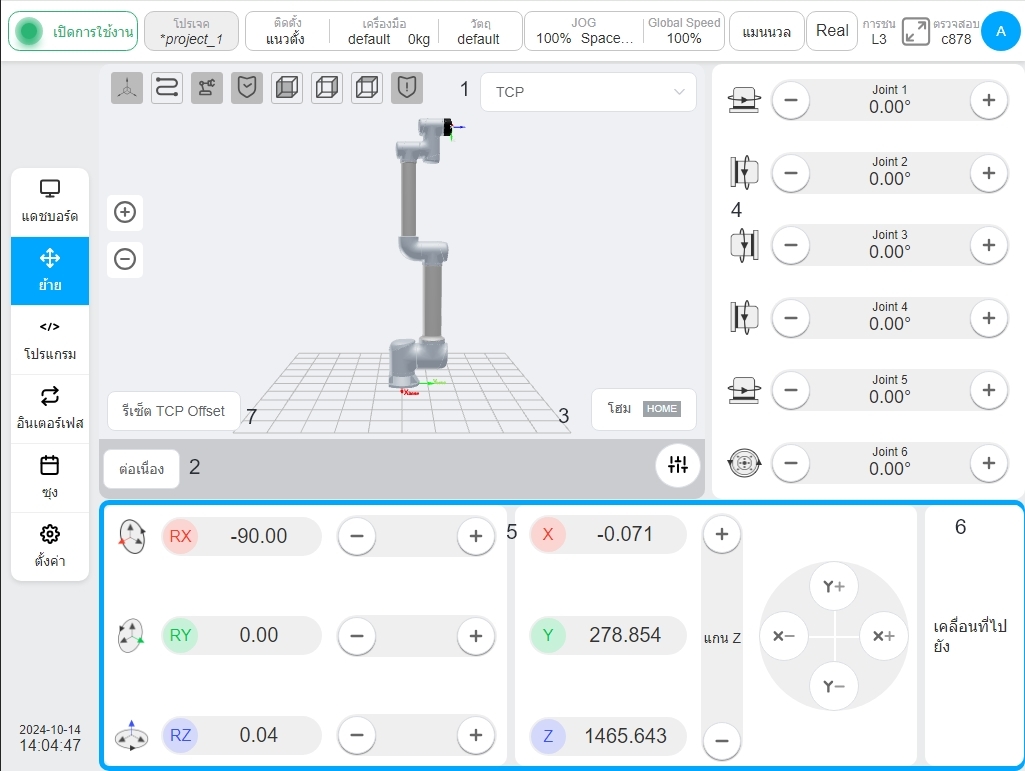
แบบจำลองจำลอง 3 มิติจะแสดงที่ด้านบนซ้ายของหน้า คลิก ① ตัวเลือก ผู้ใช้สามารถเลือกระบบพิกัดที่ใช้โดยหุ่นยนต์ปัจจุบันและระบบพิกัดอ้างอิงสำหรับการทำงานด้วยตนเองของหุ่นยนต์ โดยค่าเริ่มต้นจะใช้ระบบพิกัดโลก (เช่นเดียวกับระบบพิกัดฐานในระบบนี้) ซึ่งหมายความว่าฐานของหุ่นยนต์จะใช้เป็นจุดฐานของพิกัด นอกจากนี้ยังสามารถเลือกระบบพิกัดเครื่องมือและระบบพิกัดชิ้นงานได้อีกด้วย ระบบพิกัดเครื่องมือระบุว่าจุดสิ้นสุดของเครื่องมือสุดท้ายคือจุดฐานของพิกัดและระบบพิกัดชิ้นงานนั้นตั้งค่าได้อย่างอิสระโดยผู้ใช้ หลังจากสลับระบบพิกัดอ้างอิงแล้ว ข้อมูลทัศนคติตำแหน่งของหุ่นยนต์ในพิกัดคาร์ทีเซียนที่แสดงบนอินเทอร์เฟซจะเปลี่ยนแปลงไปตามนั้น
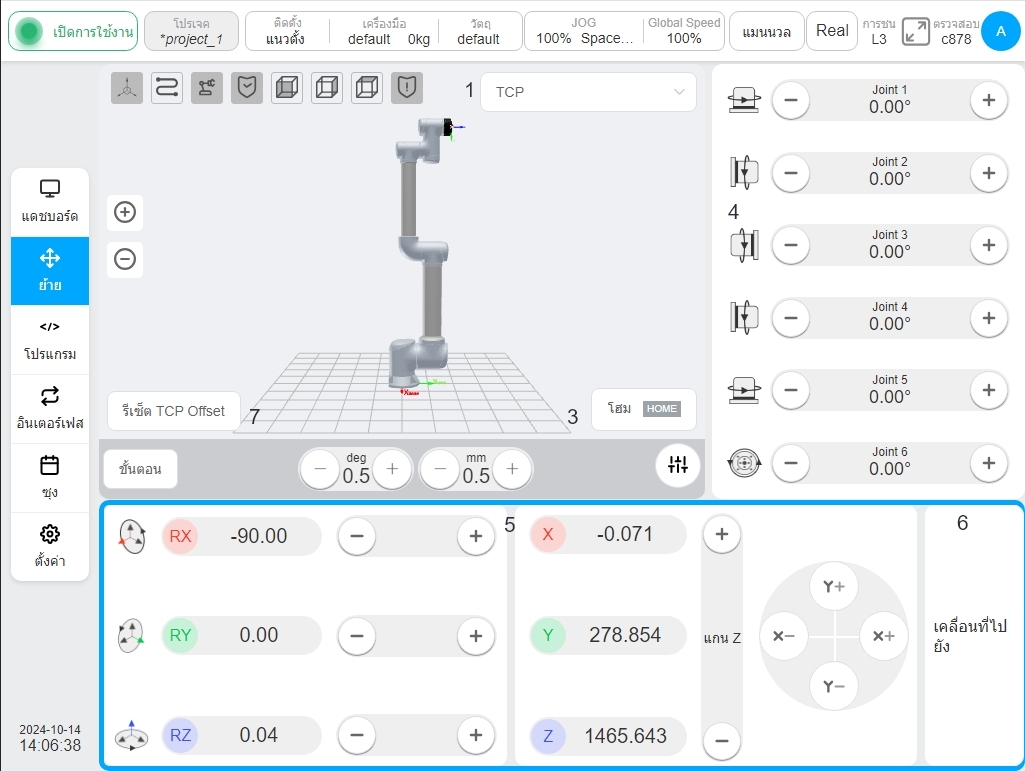
ไอคอน ② คือปุ่มที่ให้ผู้ใช้สลับโหมดในขณะที่โหมดที่แสดงบนปุ่มคือโหมดการเคลื่อนไหวที่เลือกในปัจจุบัน คลิกปุ่ม 'โหมดต่อเนื่อง' เพื่อสลับไปที่ 'โหมดก้าว' และอินเทอร์เฟซจะแสดงปุ่มปรับสำหรับมุมก้าวและระยะทางก้าวและกล่องแสดงข้อมูล ค่าเริ่มต้นของมุมก้าวและระยะทางก้าวสำหรับการเคลื่อนไหวที่ผู้ใช้กำหนดคือ 0.5 องศาและ 0.5 มม. การตั้งค่าขั้นต่ำที่อนุญาตคือ 0.1 องศาและ 0.1 มม. และการตั้งค่าสูงสุดที่อนุญาตคือ 5 องศาและ 5 มม. เพื่อปรับมุมก้าวและระยะทางก้าว
ไอคอน ③ คือปุ่ม 'กดค้างไว้เพื่อรีเซ็ต' เมื่อกดปุ่มนี้ค้างไว้ หุ่นยนต์จะเคลื่อนที่ไปยังจุด HOME ที่ตั้งไว้ การปล่อยปุ่มจะทำให้หยุดเคลื่อนที่ จุด HOME เริ่มต้นคือ 0° สำหรับข้อต่อแต่ละข้อ และหุ่นยนต์จะอยู่ในตำแหน่งตั้งตรง เมื่อหุ่นยนต์เคลื่อนที่ไปที่ปุ่ม 'HOME' ในพื้นหลังคำว่า 'Hold Down and Return' จะเปลี่ยนเป็นสีเขียว แสดงว่าหุ่นยนต์ได้ไปถึงตำแหน่ง HOME แล้ว ดังแสดงในรูป
พื้นที่ ④ คือพื้นที่ที่ข้อต่อของหุ่นยนต์ที่ควบคุมด้วยมือเคลื่อนที่ เมื่อผู้ใช้คลิกที่บริเวณใดก็ตามในพื้นที่นี้ พื้นที่ดังกล่าวจะแสดงขอบสีน้ำเงิน แสดงว่าขณะนี้กำลังควบคุมการเคลื่อนไหวของข้อต่อของหุ่นยนต์ด้วยตนเอง กดปุ่มลูกศรซ้ายหรือลูกศรขวาของข้อต่อค้างไว้เพื่อขยับข้อต่อไปข้างหน้าหรือข้างหลัง ปล่อยปุ่มเพื่อหยุดไม่ให้ข้อต่อเคลื่อนที่ ผู้ใช้ยังสามารถขยับข้อต่อได้โดยกดปุ่ม '+' และ '-' ค้างไว้ที่ด้านขวาของจี้สอน ซึ่งสอดคล้องกับข้อต่อ 1 ถึง 6 จากบนลงล่าง
พื้นที่ ⑤ คือพื้นที่ที่ปลายของหุ่นยนต์ที่ควบคุมด้วยมือเคลื่อนที่ในระบบพิกัดคาร์ทีเซียน เมื่อคลิกที่บริเวณใดบริเวณหนึ่ง พื้นที่ดังกล่าวจะแสดงขอบสีน้ำเงิน ซึ่งแสดงถึงการเคลื่อนที่ปัจจุบันของปลายของหุ่นยนต์ที่ควบคุมด้วยมือ การกดปุ่มแกน X, Y และ Z ค้างไว้จะเปลี่ยนตำแหน่งของหุ่นยนต์ในระบบพิกัดคาร์ทีเซียนโดยการกดปุ่ม RX, RY และ RZ ค้างไว้เพื่อเปลี่ยนท่าทางของหุ่นยนต์ในระบบพิกัดคาร์ทีเซียน และการปล่อยปุ่มที่เกี่ยวข้องจะหยุดการเคลื่อนที่ของหุ่นยนต์ ในทำนองเดียวกัน ผู้ใช้สามารถเปลี่ยนท่าทางตำแหน่งของหุ่นยนต์ได้โดยกดปุ่ม '+' และ '-' ทางด้านขวาของจี้สอน ปุ่มต่างๆ สอดคล้องกับทิศทางการเคลื่อนที่ทั้ง 6 ทิศทาง ได้แก่ X, Y, Z, RX, RY และ RZ ตามลำดับ จากบนลงล่าง
Caution
เมื่อใช้ปุ่มทางกายภาพของหุ่นยนต์ Jog บนแท่นสอน จำเป็นต้องยืนยันว่าการเคลื่อนที่ของพื้นที่ข้อต่อหรือการเคลื่อนที่ของพื้นที่คาร์ทีเซียนได้รับการควบคุมตามสถานะที่ใช้งานปัจจุบันหรือไม่ (ขอบสีน้ำเงิน)
ไอคอน ⑥ เป็นปุ่มสวิตช์สำหรับให้ผู้ใช้ป้อนมุมข้อต่อหรือค่าท่าทางด้วยตนเองและกดปุ่มค้างไว้เพื่อเคลื่อนย้ายหุ่นยนต์ เมื่อคลิกปุ่ม 'ย้ายไป' กล่องป้อนข้อมูลสำหรับป้อนมุมข้อต่อและค่าท่าทางจะแสดงในพื้นที่ ④ และพื้นที่ ⑤ ตามลำดับ และโมเดลหุ่นยนต์สีเทาของตำแหน่งจุดเป้าหมายจะแสดงในพื้นที่โมเดล 3 มิติ พื้นที่โมเดล 3 มิติจะแสดงโมเดลหุ่นยนต์สีเทาที่ตำแหน่งจุดเป้าหมาย ดังที่แสดงในรูปภาพ:
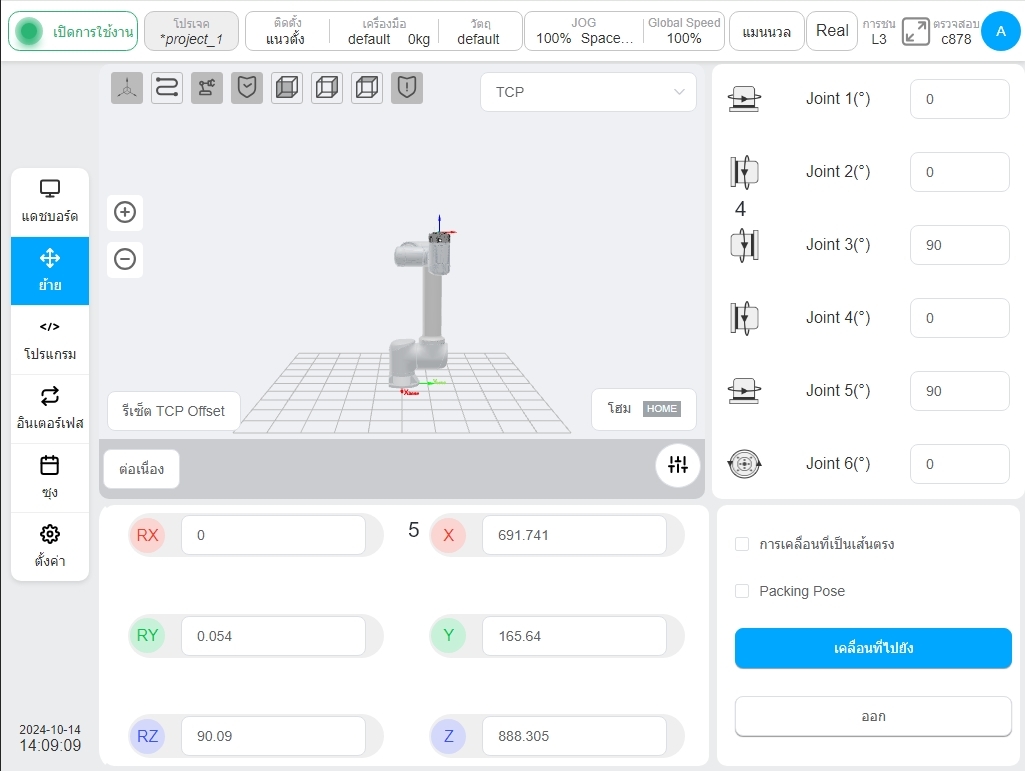
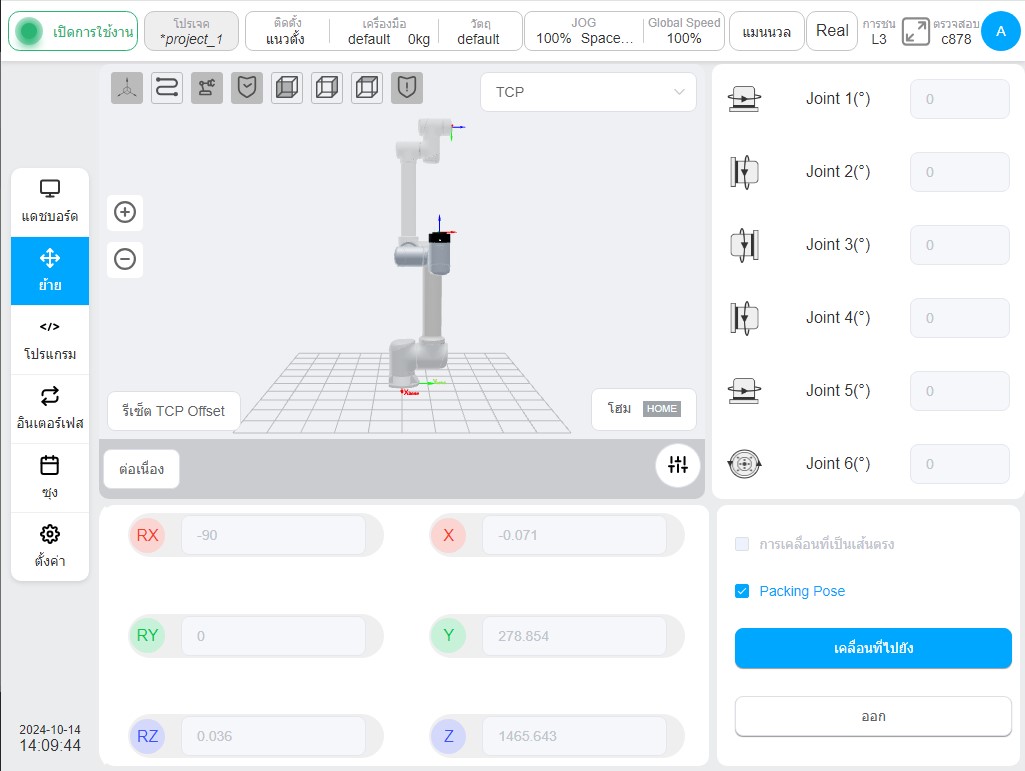
คลิกกล่องป้อนข้อมูลของมุมข้อต่อและค่าตำแหน่งเพื่อเปิดแป้นตัวเลขเสมือน หลังจากป้อนข้อมูลตำแหน่งเป้าหมายในแป้นตัวเลขเสมือนแล้ว ให้คลิกปุ่ม 'Esc' เพื่อปิดแป้นพิมพ์ตัวเลขเสมือน จากนั้นกดปุ่ม 'Move to' ค้างไว้ หุ่นยนต์จะเคลื่อนที่ไปยังตำแหน่งเป้าหมาย จากนั้นปล่อยปุ่มและหุ่นยนต์จะหยุดเคลื่อนที่ เมื่อเลือกช่องตัวเลือก 'Straight Move' หุ่นยนต์จะเคลื่อนที่ไปยังตำแหน่งเป้าหมายเป็นเส้นตรง มิฉะนั้น หุ่นยนต์จะเคลื่อนที่ไปยังตำแหน่งเป้าหมายในข้อต่อ เมื่อเลือกช่องตัวเลือก 'Packed Attitude' กล่องตัวเลือก 'Linear Move' จะถูกปิดใช้งาน กล่องใส่ค่ามุมข้อต่อและทัศนคติตำแหน่งคาร์ทีเซียนจะถูกปิดใช้งาน และกล่องตัวเลือก 'Linear Move' จะถูกปิดใช้งานสำหรับกล่องตัวเลือก 'Linear Move' ที่ถูกเลือกไว้ กล่องตัวเลือก 'Linear Move' จะถูกยกเลิกการเลือก และค่ามุมข้อต่อและทัศนคติตำแหน่งจะแสดงเป็นค่าคงที่ในทัศนคติการบรรจุ ซึ่งระบุว่าหุ่นยนต์จะเคลื่อนที่ไปยังตำแหน่งการบรรจุพร้อมกับข้อต่อ และการคลิกปุ่ม 'Exit' จะออกจากอินเทอร์เฟซของการป้อนตำแหน่งเป้าหมายด้วยตนเอง และกลับไปยังอินเทอร์เฟซการเคลื่อนที่เดิม ดังแสดงในรูป:
ไอคอน ⑦ คือปุ่ม 'รีเซ็ตค่าออฟเซ็ตเครื่องมือ' ซึ่งจะแสดงเฉพาะเมื่อเลือกระบบพิกัดอ้างอิงของหน้าที่เคลื่อนที่เป็นระบบพิกัดเครื่องมือ เมื่อผู้ใช้คลิกปุ่มนี้ ตำแหน่งในขณะคลิกจะใช้เป็นจุดเริ่มต้นอ้างอิง และตำแหน่งของหุ่นยนต์จะแสดงแบบเรียลไทม์ในพื้นที่ ⑤ ระหว่างการเคลื่อนที่ของหุ่นยนต์โดยอ้างอิงค่าออฟเซ็ตจากจุดเริ่มต้นอ้างอิงในขณะที่คลิกปุ่ม จุดเริ่มต้นอ้างอิงสำหรับคำนวณค่าออฟเซ็ต TCP จะไม่อัปเดตจนกว่าผู้ใช้คลิกปุ่ม 'รีเซ็ตค่าออฟเซ็ตเครื่องมือ' อีกครั้ง