


ความปลอดภัย#
ภาพรวม#
เอกสารฉบับนี้จะแนะนำข้อมูลสำคัญที่เกี่ยวข้องกับเรื่องความปลอดภัยและการประเมินความเสี่ยงที่ควรใส่ใจเมื่อทำการติดตั้ง ใช้งาน และบำรุงรักษาหุ่นยนต์และส่วนประกอบต่างๆ ซึ่งผู้ใช้จะต้องอ่านและทำความเข้าใจก่อนเปิดเครื่องหุ่นยนต์เป็นครั้งแรก
ก่อนดำเนินการใดๆ โปรดตรวจสอบให้แน่ใจว่าคุณได้อ่านคำแนะนำการใช้งานทั้งหมดที่ให้มาพร้อมกับอุปกรณ์แล้ว โดยเฉพาะอย่างยิ่งอันตราย คำเตือน และข้อควรระวังที่อาจเป็นอันตรายต่อความปลอดภัยของร่างกายมนุษย์และอุปกรณ์ เพื่อลดโอกาสเกิดอุบัติเหตุ หากเอกสารนี้แตกต่างจากเอกสารที่ส่งมาพร้อมกับอุปกรณ์ เอกสารที่ส่งมาพร้อมกับอุปกรณ์จะถือเป็นโมฆะ
บุคลากรที่รับผิดชอบในการติดตั้งและบำรุงรักษาอุปกรณ์จะต้องเป็นผู้เชี่ยวชาญที่ผ่านการฝึกอบรมและเชี่ยวชาญวิธีการทำงานที่ถูกต้องและข้อควรระวังด้านความปลอดภัยทั้งหมด อนุญาตให้เฉพาะบุคลากรที่ผ่านการฝึกอบรมและมีคุณสมบัติเหมาะสมเท่านั้นที่จะทำการติดตั้งและบำรุงรักษาอุปกรณ์ได้
คำชี้แจงขอบเขตและความรับผิดชอบที่มีประสิทธิผล#
ข้อมูลนี้ไม่ได้ครอบคลุมถึงวิธีการออกแบบ ติดตั้ง และใช้งานระบบหุ่นยนต์ทั้งหมด รวมทั้งไม่ครอบคลุมถึงอุปกรณ์ต่อพ่วงทั้งหมดที่อาจส่งผลต่อความปลอดภัยของระบบทั้งหมด ระบบที่ออกแบบมาอย่างดีมีความจำเป็นในการปกป้องความปลอดภัยของบุคลากร และต้องได้รับการติดตั้งตามข้อกำหนดด้านความปลอดภัยที่กำหนดไว้ในมาตรฐานและระเบียบข้อบังคับของประเทศที่หุ่นยนต์จะถูกติดตั้ง
ผู้ติดตั้งหุ่นยนต์จะต้องรับผิดชอบในการตรวจสอบให้แน่ใจว่าระบบหุ่นยนต์เป็นไปตามกฎหมายและระเบียบข้อบังคับด้านความปลอดภัยที่บังคับใช้ในประเทศหรือภูมิภาคที่หุ่นยนต์ตั้งอยู่ และอุปกรณ์ความปลอดภัยที่จำเป็นในการปกป้องผู้ควบคุมระบบหุ่นยนต์ได้รับการออกแบบและติดตั้งอย่างถูกต้อง
รายละเอียดรวมถึงแต่ไม่จำกัดเพียง:
ตรวจสอบให้แน่ใจว่าระบบหุ่นยนต์เป็นไปตามข้อกำหนดพื้นฐานทั้งหมด;
ดำเนินการประเมินความเสี่ยงของระบบทั้งหมด;
ตรวจสอบให้แน่ใจว่าการออกแบบและการติดตั้งระบบทั้งหมดนั้นถูกต้อง
ทำการตั้งค่าความปลอดภัยที่เหมาะสมในซอฟต์แวร์และตรวจสอบให้แน่ใจว่าผู้ใช้จะไม่แก้ไขการตั้งค่าดังกล่าว
จัดทำคำแนะนำการใช้งานโดยละเอียด
ออกคำประกาศรับรองความสอดคล้อง
รวบรวมข้อมูลทั้งหมดในเอกสารทางเทคนิค
ติดฉลากระบบหุ่นยนต์ที่ติดตั้งด้วยโลโก้ของผู้ติดตั้งและข้อมูลติดต่อ
บริษัท DUCO Robots Co., Ltd. มุ่งมั่นที่จะให้ข้อมูลด้านความปลอดภัยที่เชื่อถือได้ และจะไม่รับผิดชอบ เว้นแต่ว่าบริษัท DUCO Robots Co., Ltd. จะจงใจหรือประมาทเลินเล่ออย่างร้ายแรงในการให้ข้อมูลด้านความปลอดภัยที่เชื่อถือได้ ควรชี้แจงให้ชัดเจนว่าแม้ว่าทุกอย่างจะดำเนินการตามการทำงานที่ปลอดภัย แต่ก็ไม่มีการรับประกันว่าระบบหุ่นยนต์จะไม่ก่อให้เกิดความเสียหายต่อบุคคลและทรัพย์สินของผู้ใช้
บริษัท DUCO Robots Co., Ltd. จะไม่รับผิดชอบต่อการสูญเสียของผู้ใช้ที่เกิดจากเหตุผลต่อไปนี้:
เหตุสุดวิสัย (เช่น ภัยธรรมชาติ ไฟไหม้ สงคราม เป็นต้น)
ความเสียหายตามธรรมชาติหรือการสึกหรอของระบบหุ่นยนต์
สภาพแวดล้อมการทำงานของไซต์ (เช่น แรงดันไฟฟ้า อุณหภูมิ ความชื้น ฯลฯ) หรือปัจจัยภายนอก (เช่น การรบกวนจากภายนอก ฯลฯ) ไม่สามารถตอบสนองความต้องการด้านสิ่งแวดล้อมสำหรับการทำงานปกติที่ได้รับการแจ้งได้
ระบบหุ่นยนต์ไม่ได้รับการติดตั้งอย่างถูกต้อง (รวมถึงไม่ได้ติดตั้งใหม่ให้ถูกต้องหลังจากย้าย)
เนื่องจากการใช้งานโดยตั้งใจหรือประมาทเลินเล่อโดยผู้ใช้หรือบุคคลที่สาม การใช้งานที่ไม่เหมาะสม (รวมถึงความล้มเหลวของผู้ใช้ในการใช้ตามคู่มือผู้ใช้ฉบับนี้และ/หรือข้อกำหนดอื่นๆ ของ DUCO Robots Co., Ltd.) หรือการก่อวินาศกรรม
เว้นแต่จะตกลงกันเป็นอย่างอื่น DUCO Robots Co., Ltd. จะไม่รับผิดชอบต่อการสูญเสียทางอ้อม พิเศษ หรือโดยบังเอิญที่เกิดจากการใช้ระบบหุ่นยนต์ รวมถึงแต่ไม่จำกัดเพียงการสูญเสียรายได้ การสูญเสียรายได้จริงหรือที่คาดหวัง การสูญเสียธุรกิจ การสูญเสียโอกาส การสูญเสียชื่อเสียง การสูญเสียข้อมูล ความเสียหายหรือการเปิดเผย
การประเมินความเสี่ยง#
การประเมินความเสี่ยงเป็นหนึ่งในงานที่สำคัญที่สุดที่ผู้บูรณาการจะต้องดำเนินการ ตัวหุ่นยนต์เองเป็นเครื่องจักรที่สร้างเสร็จเพียงบางส่วน และความปลอดภัยของการติดตั้งหุ่นยนต์ขึ้นอยู่กับวิธีการบูรณาการหุ่นยนต์ (เช่น เครื่องมือ สิ่งกีดขวาง และเครื่องจักรอื่นๆ)
ควรให้ผู้ผลิตรวมมาตรฐานระหว่างประเทศ ISO 12100, ISO 10218-2, และ ISO/TS 15066 (หรือมาตรฐานชาติที่เกี่ยวข้อง เช่น GB 15706, GB 11291.2, GB/T 36008 ในประเทศจีน) เพื่อดำเนินการประเมินความเสี่ยง ผู้บูรณาการที่ทำการประเมินความเสี่ยงควรพิจารณาขั้นตอนการทำงานทั้งหมดตลอดอายุการใช้งานของหุ่นยนต์ รวมถึงแต่ไม่จำกัดเพียง:
สอนหุ่นยนต์เมื่อพัฒนาการติดตั้งหุ่นยนต์
วินิจฉัยและบำรุงรักษาข้อผิดพลาด
การทำงานปกติของการติดตั้งหุ่นยนต์
การประเมินความเสี่ยงจะต้องดำเนินการก่อนเปิดเครื่องหุ่นยนต์เป็นครั้งแรก ส่วนหนึ่งของการประเมินความเสี่ยงที่ดำเนินการโดยผู้บูรณาการคือการระบุการตั้งค่าคอนฟิกูเรชันความปลอดภัยที่ถูกต้องและพิจารณาว่าจำเป็นต้องมีปุ่มหยุดฉุกเฉินเพิ่มเติมและมาตรการป้องกันอื่นๆ หรือไม่
ต่อไปนี้คือการระบุความเสี่ยงหลักที่ผู้บูรณาการต้องพิจารณา โปรดทราบว่าอาจมีอันตรายสำคัญอื่นๆ ที่เกี่ยวข้องกับอุปกรณ์หุ่นยนต์เฉพาะ
นิ้วถูกประกบระหว่างข้อต่อ 4 และข้อต่อ 5 ของหุ่นยนต์
ขอบคมและจุดคมบนเครื่องมือหรือตัวเชื่อมต่อเครื่องมือเจาะผิวหนัง
ขอบคมและจุดคมบนสิ่งกีดขวางใกล้กับวิถีของหุ่นยนต์เจาะผิวหนัง
ข้อเคล็ดหรือกระดูกหักเนื่องจากแรงกระแทกระหว่างโหลดของหุ่นยนต์และพื้นผิวแข็ง
ผลที่ตามมาของสลักเกลียวหลวมที่ใช้ยึดหุ่นยนต์หรือเครื่องมือไว้ในตำแหน่ง
สิ่งของหล่นออกจากเครื่องมือ (เช่น จากการยึดที่ไม่ถูกต้องหรือไฟฟ้าดับ)
ข้อผิดพลาดในการทำงานเนื่องจากปุ่มหยุดฉุกเฉินที่แตกต่างกันบนเครื่องจักรที่แตกต่างกัน
หากติดตั้งหุ่นยนต์ในแอปพลิเคชันหุ่นยนต์ที่ไม่ทำงานร่วมกันซึ่งไม่สามารถขจัดความเสี่ยงได้อย่างเหมาะสมโดยใช้คุณลักษณะด้านความปลอดภัยภายใน (เช่น การใช้เครื่องมือที่เป็นอันตราย) ผู้รวมระบบจะต้องติดตั้งการป้องกันเพิ่มเติมตามการประเมินความเสี่ยง (เช่น การใช้อุปกรณ์ป้องกันที่สามารถป้องกันผู้รวมระบบระหว่างการติดตั้งและการเขียนโปรแกรม) บริษัท DUCO Robots Co., Ltd. จะไม่รับผิดชอบต่อความเสียหายที่เกิดจากการไม่ติดตั้งอุปกรณ์ป้องกัน
การปฏิบัติงานด้านความปลอดภัย#
การหยุดฉุกเฉิน#
การหยุดฉุกเฉินเป็นเงื่อนไขที่มีความสำคัญเหนือการควบคุมหุ่นยนต์อื่นๆ ทั้งหมด และจะส่งผลให้หุ่นยนต์หยุดทำงานที่เป็นอันตรายทั้งหมด ตัดกระแสไฟของมอเตอร์ออกจากไดรฟ์ของหุ่นยนต์ และยังคงทำงานอยู่จนกว่าจะรีเซ็ต และสามารถคืนค่าได้ด้วยการทำงานด้วยมือเท่านั้น
สถานะการหยุดฉุกเฉินแสดงว่าระบบไฟฟ้าถูกตัดการเชื่อมต่อ และหุ่นยนต์ไม่สามารถเคลื่อนที่ได้ ผู้ใช้จะต้องดำเนินการย้อนกลับ นั่นคือ รีเซ็ตปุ่มหยุดฉุกเฉินและกดปุ่ม "เปิดเครื่อง" บนจี้สอนเพื่อกลับมาทำงานตามปกติ การหยุดฉุกเฉินไม่สามารถใช้เป็นมาตรการลดความเสี่ยงได้ แต่สามารถใช้เป็นอุปกรณ์ป้องกันรองได้
ห้ามใช้การหยุดฉุกเฉินสำหรับการหยุดโปรแกรมตามปกติ เนื่องจากอาจทำให้หุ่นยนต์สึกหรอโดยไม่จำเป็นเพิ่มเติม
ฟังก์ชันที่เกี่ยวข้องกับความปลอดภัย#
บทนำฟังก์ชันความปลอดภัย#
สำหรับการเชื่อมต่อหุ่นยนต์อื่นๆ และอุปกรณ์ป้องกันเพิ่มเติม หุ่นยนต์ซีรีส์ GCR จะติดตั้งคุณลักษณะความปลอดภัยภายในที่หลากหลาย อินเทอร์เฟซไฟฟ้าฉุกเฉิน I/O ความปลอดภัย ตลอดจนสัญญาณควบคุมแบบดิจิทัลและอนาล็อก
Caution
การใช้งานและการกำหนดค่าฟังก์ชันและอินเทอร์เฟซด้านความปลอดภัยจะต้องปฏิบัติตามขั้นตอนการประเมินความเสี่ยงสำหรับการใช้งานหุ่นยนต์แต่ละตัว
หากหุ่นยนต์ตรวจพบข้อบกพร่องหรือการละเมิดในระบบความปลอดภัย (เช่น หากสายไฟเส้นใดเส้นหนึ่งในวงจรหยุดฉุกเฉินถูกตัดหรือละเมิดขีดจำกัดความปลอดภัย) ระบบจะหยุดการทำงานตามหมวดหมู่ 0
ควรคำนึงถึงเวลาในการหยุดการทำงานเป็นส่วนหนึ่งของการประเมินความเสี่ยงในการใช้งาน
Warning
การใช้พารามิเตอร์การกำหนดค่าความปลอดภัยที่แตกต่างจากที่กำหนดโดยการประเมินความเสี่ยงอาจส่งผลให้เกิดอันตรายที่ไม่สามารถกำจัดได้อย่างสมเหตุสมผลหรือความเสี่ยงที่ลดลงไม่เพียงพอ
ตรวจสอบให้แน่ใจว่าได้เชื่อมต่อเครื่องมือและตัวจับอย่างเหมาะสม ดังนั้นหากไฟฟ้าดับ จะไม่มีอันตรายเกิดขึ้น
เอฟเฟกเตอร์ปลายท่อไม่ได้รับการปกป้องโดยระบบความปลอดภัย GCR เอฟเฟกเตอร์ปลายท่อและสายเชื่อมต่อไม่ได้รับการตรวจสอบ
หมวดหมู่การหยุดเพื่อความปลอดภัย#
หุ่นยนต์สามารถเปิดใช้งานหมวดหมู่การหยุด 3 หมวดหมู่ตาม IEC 60204-1 ขึ้นอยู่กับสถานการณ์ หมวดหมู่เหล่านี้ถูกกำหนดไว้ในตารางด้านล่าง
0(SS0)
ตัดพลังงานของหุ่นยนต์ทันที
1(SS1)
ลดความเร็วของข้อต่อแต่ละข้อลงเหลือ 0 ทันทีด้วยอัตราเร่งที่เร็วที่สุด ยกประตูล็อกขึ้นหลังจากข้อต่อหยุดนิ่ง และตัดแหล่งจ่ายไฟของหุ่นยนต์
2(SS2)
หุ่นยนต์จะชะลอความเร็วลงจนหยุดนิ่งในขณะที่รักษาวิถีการเคลื่อนที่ หลังจากหยุดนิ่ง ข้อต่อทั้งหมดจะยังคงอยู่ในสถานะเปิดใช้งาน และเบรกจะไม่เคลื่อนที่
การสลับระหว่างหมวดหมู่การหยุด:
เมื่อหยุดหมวดหมู่ 1 ตัวจับเวลาจะถูกเรียกใช้งานพร้อมกัน หากหุ่นยนต์ยังคงทำงานด้วยความเร็วที่ปลอดภัยที่กำหนดหลังจาก 500 มิลลิวินาที หุ่นยนต์จะเปลี่ยนเป็นการหยุดหมวดหมู่ 0
คุณสมบัติด้านความปลอดภัย#
ฟังก์ชันด้านความปลอดภัยของหุ่นยนต์ร่วมปฏิบัติงาน DUCO ที่แสดงไว้ในตารางด้านล่างนี้อยู่ในหุ่นยนต์และมีจุดประสงค์เพื่อควบคุมระบบหุ่นยนต์ นั่นคือ หุ่นยนต์และเครื่องมือ/อุปกรณ์ปลายแขนที่เชื่อมต่ออยู่ ฟังก์ชันด้านความปลอดภัยของหุ่นยนต์ใช้เพื่อลดความเสี่ยงต่อระบบหุ่นยนต์ตามที่กำหนดโดยการประเมินความเสี่ยง
การหยุดฉุกเฉิน (ES)
กำลังดำเนินการ SS1
การหยุดเพื่อป้องกัน
กำลังดำเนินการ SS2
การหยุดการทำงานอย่างปลอดภัย (SOS)
หลังจากดำเนินการ ss2 แล้ว การตรวจสอบ SOS จะถูกเรียกใช้งานเพื่อตรวจสอบการเบี่ยงเบนของตำแหน่งหุ่นยนต์ในปัจจุบัน และ SS0 จะถูกเรียกใช้งานหากถูกละเมิด
ตำแหน่งจำกัด Joint Safe (SLP)
ตามการตั้งค่าเกณฑ์ SS2 จะถูกเรียกใช้งานเมื่อตำแหน่งข้อต่อถึงเกณฑ์ หากขีดจำกัดของข้อต่อถูกเรียกใช้งาน ss0 จะถูกเรียกใช้งานโดยตรง
ความเร็วจำกัด Joint Safe (SLS)
ตามการตั้งค่าเกณฑ์ SS2 จะถูกเรียกใช้งานเมื่อความเร็วข้อต่อถึงเกณฑ์ หากขีดจำกัดความเร็วข้อต่อถูกเรียกใช้งาน ss0 จะถูกเรียกใช้งานโดยตรง
ขีดจำกัดตำแหน่ง TCP
สามารถตั้งค่าระนาบความปลอดภัยเพื่อจำกัดพื้นที่การทำงานของหุ่นยนต์ได้ ซึ่งจะถูกตั้งค่าตามค่าเกณฑ์ เมื่อถึงค่าเกณฑ์ SS2 จะถูกกระตุ้น หากระนาบความปลอดภัยถูกกระตุ้น ตัวควบคุมความปลอดภัยจะกระตุ้น ss0 โดยตรง อนุญาตให้มีระนาบความปลอดภัยสูงสุดหกระนาบและระบบพิกัด TCP สามระบบ
ขีดจำกัดความเร็ว TCP
ตามการตั้งค่าเกณฑ์ SS2 จะถูกกระตุ้นเมื่อถึงเกณฑ์ หากขีดจำกัดความเร็ว TCP ถูกกระตุ้น ตัวควบคุมความปลอดภัยจะกระตุ้น ss0 โดยตรง
ขีดจำกัดตำแหน่งข้อศอก
ตามการตั้งค่าเกณฑ์ SS2 จะถูกกระตุ้นเมื่อถึงเกณฑ์ หากข้อจำกัดตำแหน่งข้อศอกถูกกระตุ้น ตัวควบคุมความปลอดภัยจะกระตุ้น ss0 โดยตรง
ขีดจำกัดความเร็วข้อศอก
ตามการตั้งค่าเกณฑ์ SS2 จะถูกกระตุ้นเมื่อถึงเกณฑ์ หากขีดจำกัดความเร็วข้อศอกถูกกระตุ้น ตัวควบคุมความปลอดภัยจะกระตุ้น ss0 โดยตรง
ขีดจำกัดแรงต่อข้อต่อ
ตามการตั้งค่าเกณฑ์ SS2 จะถูกกระตุ้นเมื่อถึงเกณฑ์ หากขีดจำกัดแรงบิดต่อข้อต่อถูกกระตุ้น ตัวควบคุมความปลอดภัยจะกระตุ้น ss0 โดยตรง
ขีดจำกัดแรง TCP
ตามการตั้งค่าขีดจำกัด SS2 จะถูกเรียกใช้เมื่อถึงขีดจำกัด หากขีดจำกัดแรงสุดท้ายถูกเรียกใช้ ตัวควบคุมความปลอดภัยจะเรียกใช้ ss0 โดยตรง
ขีดจำกัดแรงข้อศอก
ตามการตั้งค่าขีดจำกัด SS2 จะถูกเรียกใช้เมื่อถึงขีดจำกัด หากขีดจำกัดแรงข้อศอกถูกเรียกใช้ ตัวควบคุมความปลอดภัยจะเรียกใช้ ss0 โดยตรง
ขีดจำกัดพลังงาน
ตามการตั้งค่าขีดจำกัด SS2 จะถูกเรียกใช้เมื่อถึงขีดจำกัด หากขีดจำกัดพลังงานถูกเรียกใช้ ตัวควบคุมความปลอดภัยจะเรียกใช้ ss0 โดยตรง
อินพุตสวิตช์โหมด
หากปิดใช้งานอินพุตทางกายภาพ คุณสามารถสลับผ่าน UI ได้ แต่ไม่สามารถสลับทั้งสองอย่างพร้อมกันได้ SS2 จะถูกเรียกใช้เมื่อเปลี่ยนโหมด หากหยุดสคริปต์ สคริปต์จะทำงานต่อไปได้
เปิดใช้งานอินพุตอุปกรณ์
คุณสามารถเลือกได้ว่าจะเปิดใช้งานอินพุตนี้หรือไม่ อินพุตนี้ใช้ได้เฉพาะในโหมดแมนนวลเท่านั้น ไม่ใช่โหมดอัตโนมัติ การละเมิดจะเรียกใช้ SS2
อินพุตการหยุดป้องกัน
หากพารามิเตอร์นี้ใช้ได้ในทุกโหมด SS2 จะถูกทริกเกอร์ หากอินพุตการรีเซ็ตการป้องกันความปลอดภัยไม่ได้เปิดใช้งาน อินพุตจะรีเซ็ตโดยอัตโนมัติหลังจากสัญญาณหายไป มิฉะนั้น อินพุตการรีเซ็ตจะต้องถูกทริกเกอร์ก่อนจึงจะทำการรีเซ็ตได้
อินพุตการรีเซ็ตการหยุดป้องกัน
คุณสามารถเลือกได้ว่าจะรีเซ็ตอินพุตสัญญาณหรือไม่ หากเปิดใช้งานการรีเซ็ตการป้องกันความปลอดภัย เมื่อการป้องกันความปลอดภัยที่ทริกเกอร์หยุดและสัญญาณทริกเกอร์หายไป จำเป็นต้องมีอินพุตสัญญาณช่องสัญญาณก่อนที่การเคลื่อนไหวจะดำเนินต่อไปได้ ขอบที่เพิ่มขึ้นนั้นถูกต้อง และต้องรักษาระดับสูงไว้เป็นเวลา 500 มิลลิวินาที
อินพุตการหยุดป้องกันอัตโนมัติ
พารามิเตอร์นี้ใช้ได้เฉพาะในโหมดอัตโนมัติเท่านั้น SS2 จะถูกทริกเกอร์ หลังจากสัญญาณหายไป โหมดปลอดภัยจะกลับสู่ปกติ
อินพุตการรีเซ็ตการหยุดป้องกันอัตโนมัติ
คล้ายกับอินพุตการรีเซ็ตการหยุดป้องกัน พารามิเตอร์นี้ใช้ได้เฉพาะกับการหยุดป้องกันที่ทริกเกอร์โดยอินพุตการหยุดป้องกันอัตโนมัติเท่านั้น
เอาต์พุตการหยุดฉุกเฉินของระบบ
สัญญาณนี้จะถูกส่งออกเมื่อระบบถูกกระตุ้นโดยเอาต์พุตการหยุดฉุกเฉินแบบป้องกันการหยุดเท่านั้น
เอาต์พุตการหยุดแบบป้องกัน
สัญญาณนี้จะถูกส่งออกเมื่ออินพุตการหยุดแบบป้องกันถูกกระตุ้น เอาต์พุตการหยุดแบบป้องกันอัตโนมัติ
การป้องกันโหมดอัตโนมัติหยุดส่งออก
สัญญาณนี้จะถูกส่งออกเมื่อการป้องกันหยุดในโหมดอัตโนมัติเท่านั้น
โหมดลดขนาด
โหมดลดขนาดจะถูกกระตุ้น และพารามิเตอร์ที่เกี่ยวข้องกับโหมดลดขนาดจะถูกใช้
เอาต์พุตโหมดลดขนาด
สามารถส่งออกสัญญาณได้ทั่วโลก
โหมดการกู้คืน
เมื่อเกินขีดจำกัดของข้อต่อหรือขีดจำกัด TCP คุณจะต้องรีสตาร์ทเพื่อเข้าสู่โหมดการกู้คืน โหมดการกู้คืนจะจำกัดความเร็วของข้อต่อไม่เกิน 30 องศา/วินาที และความเร็วสิ้นสุดไม่เกิน 250 มม./วินาที
อินเทอร์เฟซ IO ด้านความปลอดภัย#
อินเทอร์เฟซ IO ด้านความปลอดภัยเป็น SCram ภายนอกและอินเทอร์เฟซอินพุตและเอาต์พุตด้านความปลอดภัยที่จัดเตรียมโดยตู้ควบคุม ซึ่งรวมถึงอินพุตสัญญาณ SCram 1 ตัว (สัญญาณพาสซีฟ) เอาต์พุตข้อเสนอแนะ SCram 1 ตัว (สัญญาณแอ็คทีฟ) อินพุตการหยุดป้องกัน 1 ตัว (สัญญาณพาสซีฟ) อินพุตความปลอดภัยที่กำหนดค่าได้ 2 ตัว (สัญญาณพาสซีฟ) และเอาต์พุตความปลอดภัยที่กำหนดค่าได้ 2 ตัว (สัญญาณแอ็คทีฟ) ในจำนวนนี้ อินพุตสัญญาณสแครม อินพุตการหยุดป้องกัน และอินพุตความปลอดภัยที่กำหนดค่าได้นั้นมีผลที่ระดับสูงของอิเล็กทรอนิกส์ และระดับที่มีประสิทธิภาพคือ 11V-30VDC นอกจากนี้ เมื่อใช้เอาต์พุตความปลอดภัยที่กำหนดค่าได้และเอาต์พุตข้อเสนอแนะสแครม จะต้องเชื่อมต่อรีเลย์สำหรับการสลับ
อินพุตความปลอดภัยที่กำหนดค่าได้สามารถกำหนดค่าได้ดังนี้: อินพุตการรีเซ็ตการ์ด อินพุตการหยุดการ์ดโหมดอัตโนมัติ อินพุตการรีเซ็ตการ์ดโหมดอัตโนมัติ อินพุตโหมดลด เอาต์พุตความปลอดภัยที่กำหนดค่าได้สามารถกำหนดค่าได้ดังนี้: เอาต์พุตการรีเซ็ตการ์ด เอาต์พุตการหยุดการ์ดโหมดอัตโนมัติ เอาต์พุตโหมดลด คำจำกัดความของอินเทอร์เฟซมีดังนี้:
คำจำกัดความของอินเทอร์เฟซ I/O ด้านความปลอดภัย

การบาดเจ็บจากแคลมป์และความเสี่ยงจากการชน#
มีจุดบอดในฟังก์ชันตรวจจับการชนระหว่างการทำงานจริงของหุ่นยนต์ ดังนั้นผู้ใช้จะต้องใส่ใจกับความเสี่ยงของความล้มเหลวในการตรวจจับการชนหรือการบาดเจ็บจากแคลมป์ภายใต้เงื่อนไขการทำงานพิเศษ เงื่อนไขการทำงานทั่วไปสามประการอธิบายไว้ด้านล่าง
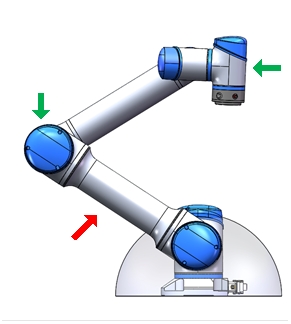
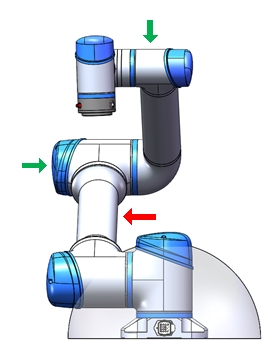
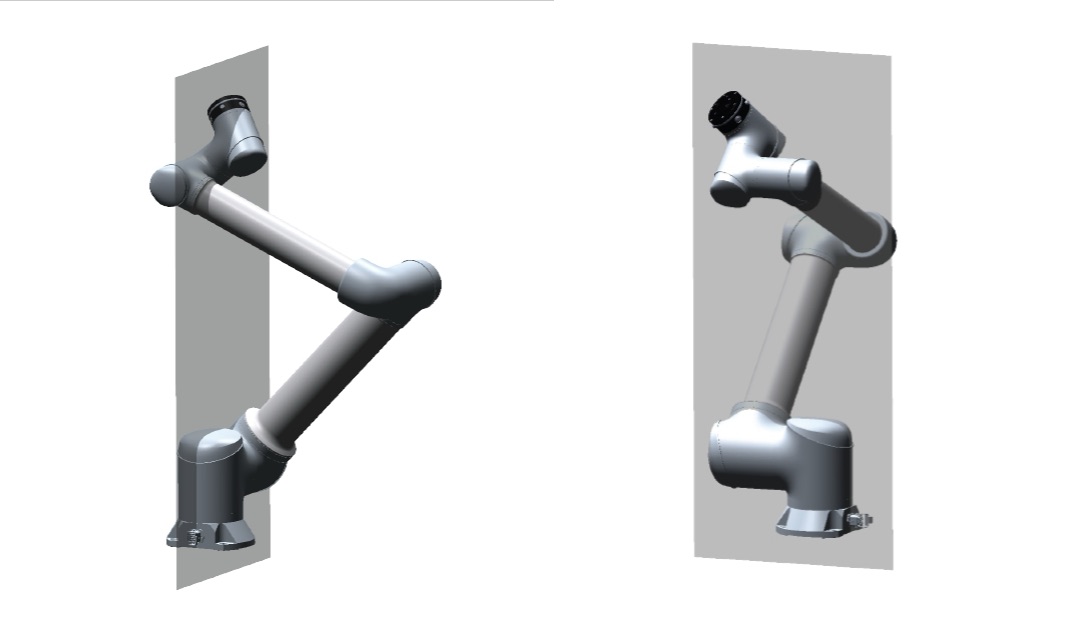
เงื่อนไขการทำงาน 1: เมื่อตำแหน่งปลายของหุ่นยนต์อยู่ห่างจากจุดศูนย์กลางฐานหุ่นยนต์มากกว่า 1,000 มม. หากหุ่นยนต์เคลื่อนที่ไปในทิศทางของลูกศรสีแดงดังแสดงในรูปที่ 2.6.1 และรูปที่ 2.6.2 หุ่นยนต์จะไวต่อแรงภายนอกในทิศทางของการเคลื่อนไหวน้อยลง และมีความเสี่ยงต่อการบาดเจ็บจากการหนีบมากขึ้น เมื่อหุ่นยนต์เคลื่อนที่ไปในทิศทางของลูกศรสีเขียวดังแสดงในรูปที่ 2.6.1 และรูปที่ 2.6.2 หากหุ่นยนต์ชนกับสภาพแวดล้อมภายนอก หุ่นยนต์จะไวต่อแรงภายนอกที่เกิดจากการชน
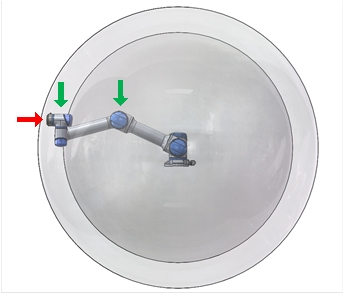
รูปที่ 2.6.1 มุมมองด้านหน้าของหุ่นยนต์ภายใต้สภาพการทำงาน
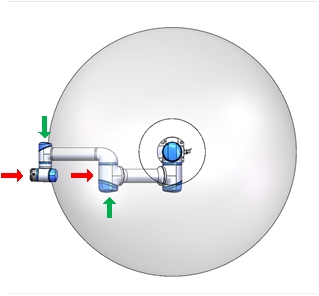
รูปที่ 2.6.2 มุมมองด้านบนของหุ่นยนต์ภายใต้สภาพการทำงาน
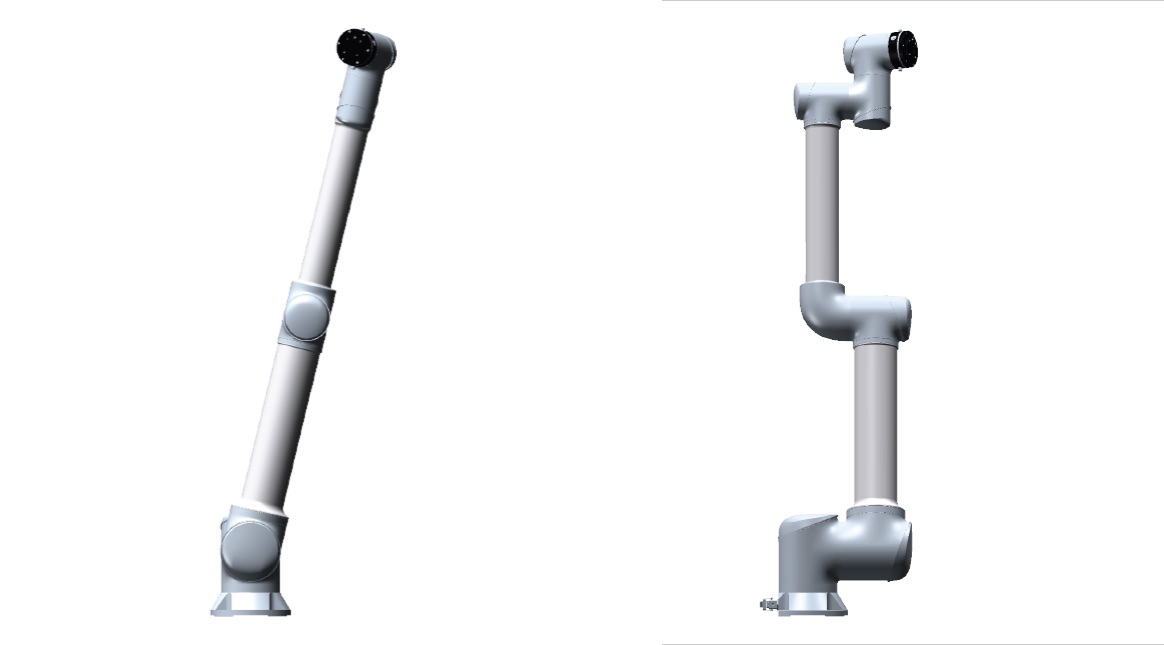
สภาพการทำงาน 2: โดยที่ทิศทาง Z ของฐานหุ่นยนต์เป็นจุดศูนย์กลางและรัศมีประมาณ 350 มม. หากจุดสัมผัสอยู่ภายในช่วงนี้และทิศทางของแรงสัมผัสตั้งฉากกับระนาบที่ก้านสูบของข้อต่อ 2 และข้อต่อ 3 ตั้งอยู่ ฟังก์ชันตรวจจับการชนจะตรวจจับการชนระหว่างหุ่นยนต์กับโลกภายนอกได้ยาก ลูกศรสีแดงในรูปที่ 2.6.3 และรูปที่ 2.6.4 แสดงไว้ ในขณะนี้ หากทิศทางของแรงสัมผัสระหว่างหุ่นยนต์กับโลกภายนอกสอดคล้องกับทิศทางของเครื่องหมายฐาน Z มากขึ้น หุ่นยนต์จะไวต่อแรงภายนอกที่เกิดจากการชนมากขึ้น ดังที่แสดงด้วยลูกศรสีเขียวในรูปที่ 2.6.3
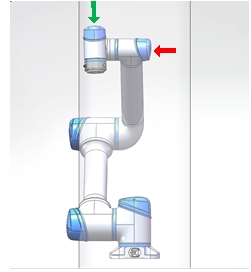
รูปที่ 2.6.3 มุมมองด้านหน้าของสภาพการทำงาน 2
รูปที่ 2.6.4 มุมมองด้านบนของสภาพการทำงาน 2
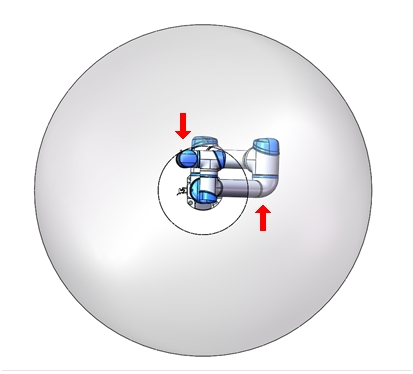
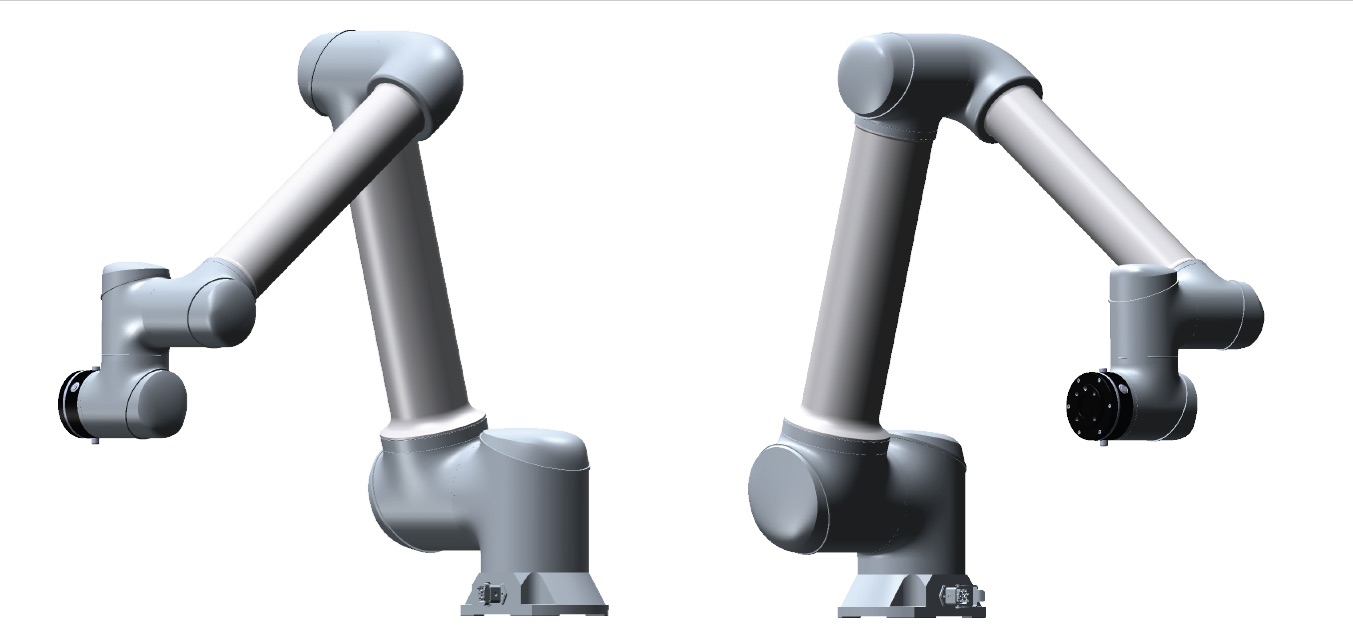
สภาพการทำงาน 3: ไม่ว่าหุ่นยนต์จะอยู่ในท่าทางหรือสถานะการเคลื่อนไหวใด เมื่อหุ่นยนต์ชนกับโลกภายนอก หากจุดชนอยู่ตรงกลางที่จุดกำเนิดของตำแหน่งฐานของหุ่นยนต์และรัศมีอยู่ที่ประมาณ 350 มม. หุ่นยนต์จะตรวจจับการชนประเภทนี้ได้ยาก และมีความเสี่ยงที่จะเกิดอันตรายจากการถูกกัดมากขึ้น ดังที่แสดงด้วยลูกศรสีแดงในรูปที่ 2.6.5 และรูปที่ 2.6.6 เมื่อจุดชนอยู่นอกช่วงและไม่ตรงตามเงื่อนไขจุดบอดในการตรวจจับการชนที่อธิบายไว้ในเงื่อนไขการทำงาน 1 และ 2 หุ่นยนต์จะตรวจจับการชนกับโลกภายนอกได้ง่ายขึ้น ดังที่แสดงด้วยลูกศรสีเขียวในรูปที่ 2.6.5 และรูปที่ 2.6.6
รูปที่ 2.6.5 มุมมองสามด้านของเงื่อนไขการทำงาน
รูปที่ 2.6.6 มุมมองสามด้านบวกของเงื่อนไขการทำงาน
สำหรับเงื่อนไขการทำงานทั้งหมดที่อธิบายไว้ข้างต้น หากหุ่นยนต์เคลื่อนที่ไปในทิศทางที่ไม่ไวต่อการตรวจจับการชนจากภายนอก ควรลดความเร็วในการวิ่งที่จุดนี้ให้มากที่สุด โดยคำนึงถึงความจำเป็นในการจำกัดแรงร่วมมือของหุ่นยนต์กับโลกภายนอก
เมื่อเกิดอุบัติเหตุจากการชนขึ้นโดยไม่ได้ตั้งใจ สามารถใช้ฟังก์ชันการปลดเบรกมือเพื่อบรรเทาความเสียหายที่เกิดจากอุบัติเหตุได้
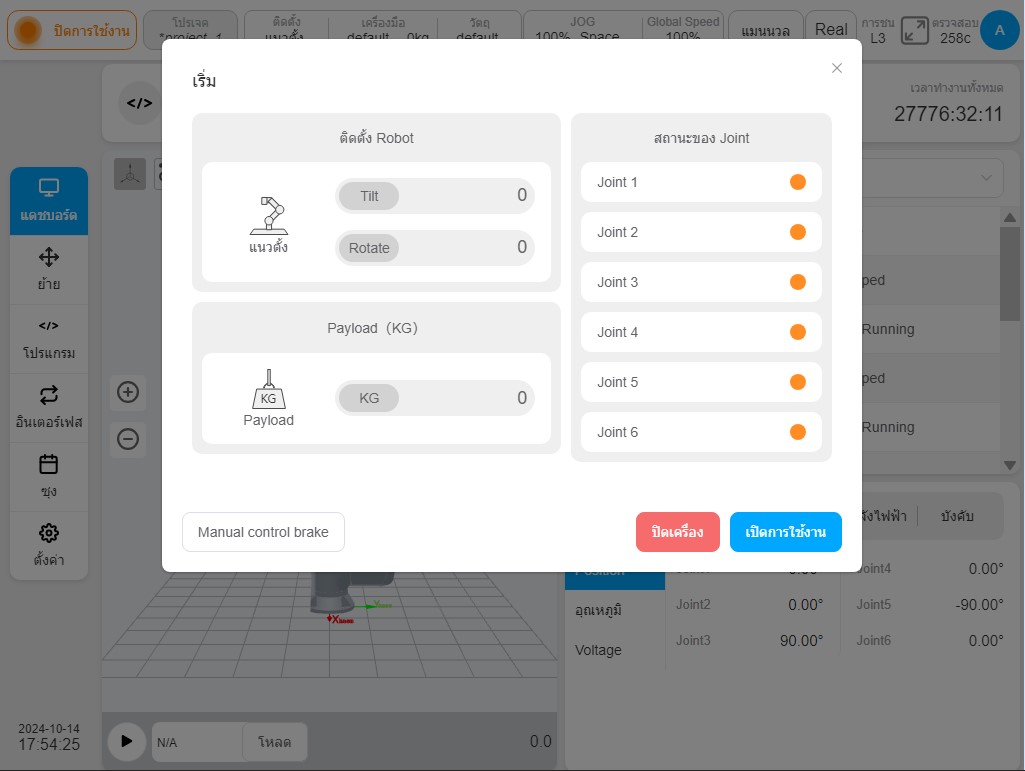
เมื่อหุ่นยนต์เปิดอยู่แต่ไม่ได้เปิดใช้งาน คุณสามารถเริ่ม "ฟังก์ชันเบรกปลดด้วยตนเอง" ที่มุมล่างซ้ายของอินเทอร์เฟซได้ หลังจากคลิกปุ่ม "เบรกปลดด้วยตนเอง" อินเทอร์เฟซจะสลับไปตามภาพด้านล่าง:
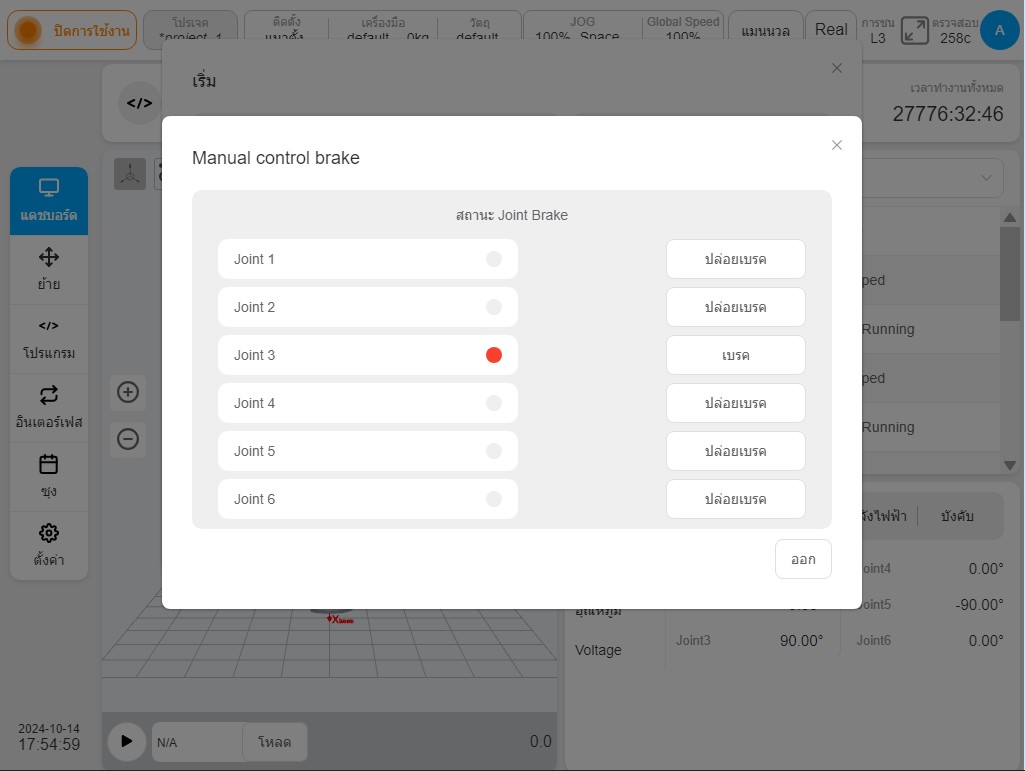
เมื่อคลิกปุ่ม "เบรกปลด" เบรกของข้อต่อที่เกี่ยวข้องจะถูกปลดออก ซึ่งจะทำให้ข้อต่อถูกขับเคลื่อนโดยไม่ต้องใช้พลังงาน ไฟแสดงสถานะสีแดงที่ด้านซ้ายของอินเทอร์เฟซใช้เพื่อระบุสถานะของเบรกยึด เมื่อคลิกปุ่ม "ปิดเบรก" เบรกของข้อต่อที่เกี่ยวข้องจะถูกปิดลง
ความเสี่ยงจากความเร็วเกินของหุ่นยนต์#
หุ่นยนต์จะชะลอความเร็วโดยอัตโนมัติเมื่อทำการวางแผนการเคลื่อนที่ (เส้นตรง ส่วนโค้ง ฯลฯ ยกเว้นการเคลื่อนไหวของข้อต่อ) ใกล้จุดเอกฐาน และควรหลีกเลี่ยงจุดเอกฐานหรือผ่านจุดเอกฐานด้วยการเคลื่อนไหวของข้อต่อเมื่อทำการสอน มีจุดเอกฐานของไหล่ จุดเอกฐานของข้อศอก และจุดเอกฐานของข้อมือสำหรับการกำหนดค่าซีรีส์ GCR
ภาวะไหล่เอียง#
เมื่อจุดศูนย์กลางของข้อต่อข้อมือ O6 ตั้งอยู่บนแกน J1 ของข้อต่อ 1 ภาวะไหล่เอียงจะเกิดขึ้นพร้อมกัน ทำให้ข้อต่อ 1 ไม่สามารถแก้ปัญหาได้ นอกจากนี้ ยังเกิดภาวะไหล่เอียงเมื่อ O6 อยู่ใกล้กับ J1 มาก ซึ่งการขยับปลายอาจทำให้ข้อต่อ 1 ทำงานมากเกินไป ดูรูปด้านล่างสำหรับท่าไหล่เอียงใกล้กับท่านี้
รูปที่ 2.7.1 ท่าอ้างอิงภาวะไหล่เอียง
ภาวะเอกฐานของข้อศอก#
เมื่อข้อต่อ 2 แกนข้อต่อ 3 และข้อต่อ 4 จะแสดงเป็น J2, J3 และ J4 อยู่ในระนาบเดียวกัน ส่งผลให้ไม่มีวิธีแก้ไขสำหรับข้อต่อ 2 กล่าวโดยง่าย เมื่อข้อต่อ 3 อยู่ในท่าเอกฐานใกล้ 0 องศา การขยับปลายอาจทำให้ข้อต่อ 2 ข้อต่อ 3 และข้อต่อ 4 ทำงานเกินกำลัง ดูรูปด้านล่างสำหรับท่าเอกฐานใกล้ข้อศอก:
รูปที่ 2.7.2 ท่าอ้างอิงภาวะเอกฐานของข้อศอก
ภาวะเอกฐานของข้อมือ#
เมื่อข้อต่อ 5 อยู่ที่ 0 องศา ทำให้ไม่สามารถแก้ข้อ 6 ได้ ส่งผลให้เกิดภาวะเอกฐานของข้อมือ เมื่อข้อต่อ 5 อยู่ใกล้กับ 0 องศา แสดงท่าทางเอกฐานใกล้ข้อมือ และการขยับปลายอาจทำให้ข้อต่อ 4 ข้อต่อ 5 และข้อต่อ 6 ทำงานเร็วเกินไป ดูรูปต่อไปนี้:
รูปที่ 2.7.3 ท่าอ้างอิงภาวะเอกฐานของข้อมือ
เมื่อหุ่นยนต์วิ่งไปยังหรือใกล้จุดเอกฐานตามรูปด้านบน การเคลื่อนที่ที่วางแผนไว้โดยอิงตามพิกัดคาร์ทีเซียนไม่สามารถแก้กลับได้สำหรับการเคลื่อนที่ของข้อต่อของแต่ละแกน และไม่สามารถดำเนินการวางแผนการเคลื่อนที่ได้อย่างถูกต้อง ดังนั้น จึงสามารถใช้คำสั่งการเคลื่อนที่ของโหนดหรือการเคลื่อนที่ของการเคลื่อนที่ของ j ได้
Caution
หลีกเลี่ยงการใช้คำสั่ง เช่น เส้นตรง ส่วนโค้ง และการย้ายปลายในทิศทางของ X, Y, Z, RX, RY และ RZ ใกล้จุดเอกฐาน หุ่นยนต์เสี่ยงต่อการหยุดนิ่ง
สำหรับเส้นทางที่มีความเสี่ยงเฉพาะ จะต้องประเมินให้ครบถ้วนก่อนดำเนินการ