หน้าอินเทอร์เฟซ#
การคลิกปุ่ม 'อินเทอร์เฟซ' ในแถบนำทางจะเริ่มต้นที่หน้าย่อย I/O ภายใต้หน้าอินเทอร์เฟซ มีหน้าย่อย 6 หน้าภายใต้หน้าอินเทอร์เฟซ ได้แก่ I/O, Register, CCI, TCI, TCP/IP และ Industrial Bus ตามรุ่นตู้ควบคุม มีหน้าสองประเภทดังแสดงในรูปภาพ:
เหมาะสำหรับตู้ควบคุม DC30D
เหมาะสำหรับตู้ควบคุม DC00 / DC15S-J9 / DC30D-J9
ส่วนบนของหน้า (1) คือแท็บหน้าย่อยของหน้าอินเทอร์เฟซ และส่วนล่าง (2) คือพื้นที่แสดงผลของหน้าย่อยที่เกี่ยวข้อง เมื่อผู้ใช้เลือกตัวเลือกหน้าย่อยอื่น พื้นที่ ② จะสอดคล้องกับเนื้อหาการแสดงผลที่สลับไปยังตัวเลือกนี้
IO#
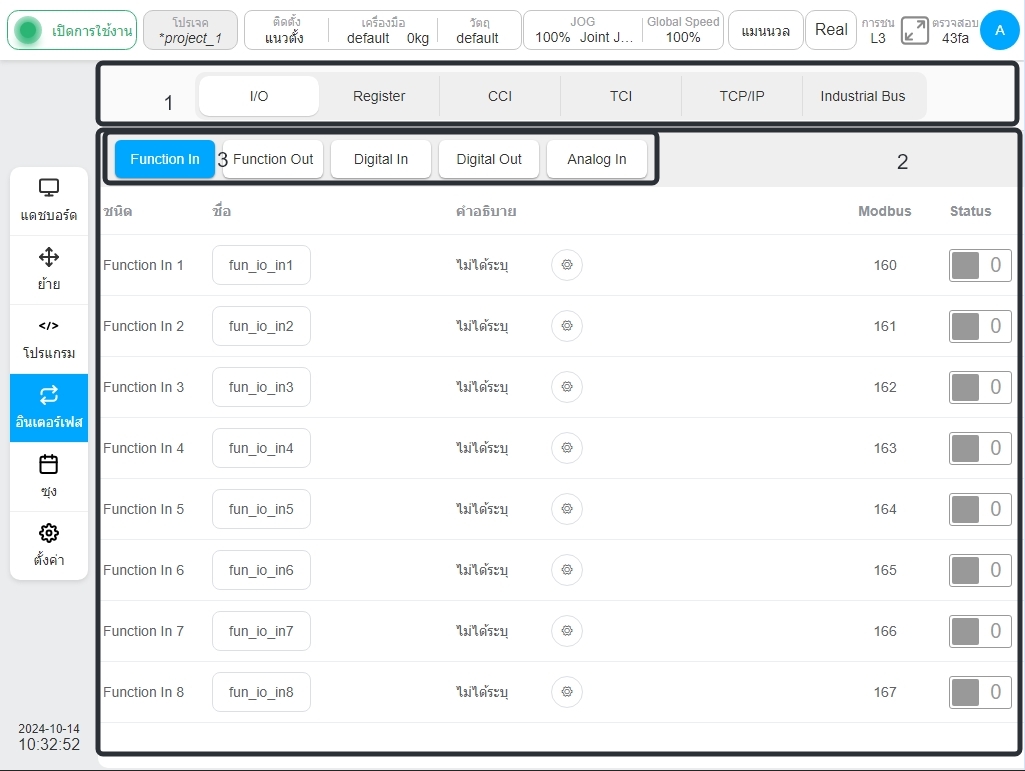
พื้นที่ ② ในภาพแสดงเนื้อหาที่สอดคล้องกันของแท็บต่างๆ ของหน้าย่อย I/O ด้านบนคือพื้นที่แสดงผลของหน้าย่อย I/O ③ คือป้ายกำกับที่สร้างขึ้นภายใต้หน้าย่อย I/O สำหรับอินพุตและเอาต์พุตต่างๆ
สำหรับตู้ควบคุม DC30D มีอินพุตฟังก์ชัน เอาต์พุตฟังก์ชัน อินพุตทั่วไป เอาต์พุตทั่วไป และอินพุตอะนาล็อก 5 ประเภทในหน้าย่อย I/O คลิกแถบป้ายกำกับต่างๆ เพื่อสลับและแสดงข้อมูลสถานะอินพุตหรือเอาต์พุต 5 ประเภท
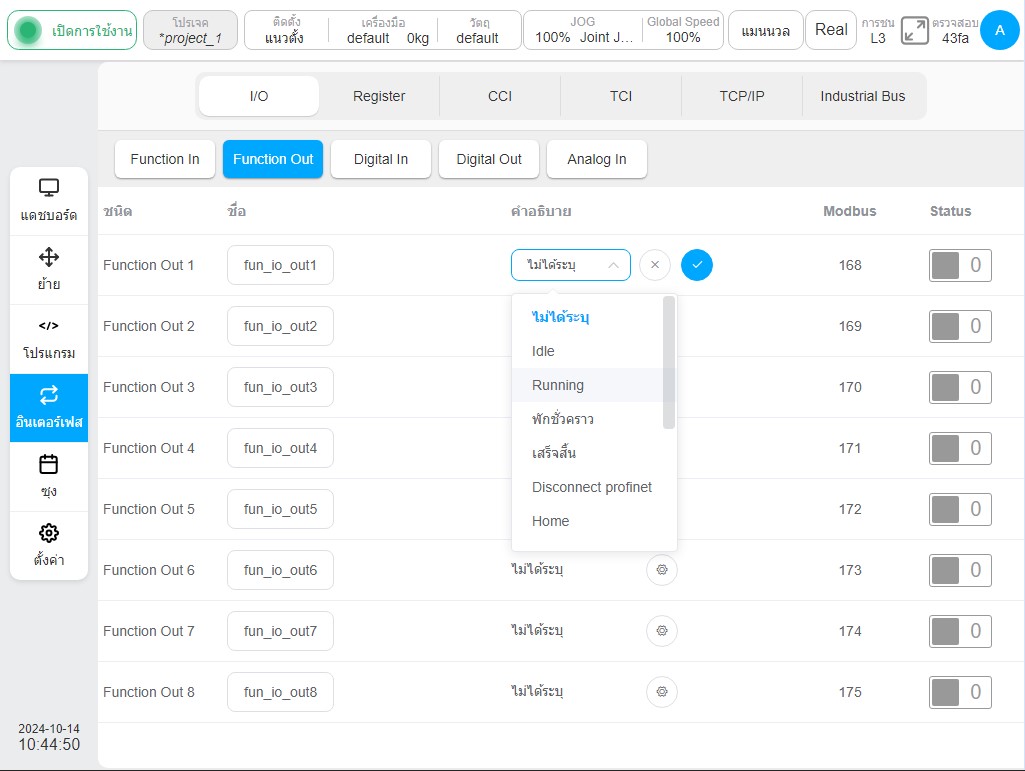
อินเทอร์เฟซอินพุตฟังก์ชันสามารถตรวจสอบสถานะและข้อมูลพื้นฐานของอินพุตดิจิทัล 8 ทางที่สามารถตั้งค่าฟังก์ชันบางอย่างในตู้ควบคุมได้ คลิกฟังก์ชันเพื่อป้อนชื่อ แป้นพิมพ์เสมือนทั่วไปจะปรากฏขึ้น ผู้ใช้สามารถปรับเปลี่ยนชื่อเริ่มต้นของฟังก์ชันได้ หลังจากป้อนชื่อเริ่มต้นสำหรับฟังก์ชันการปรับเปลี่ยนแล้ว ไอคอน ① ที่แสดงในรูปจะแสดงที่ด้านขวาของกล่องแสดงชื่อ คลิกไอคอนเพื่อคืนค่าชื่ออินพุตฟังก์ชันเป็นชื่อเริ่มต้นที่สอดคล้องกัน
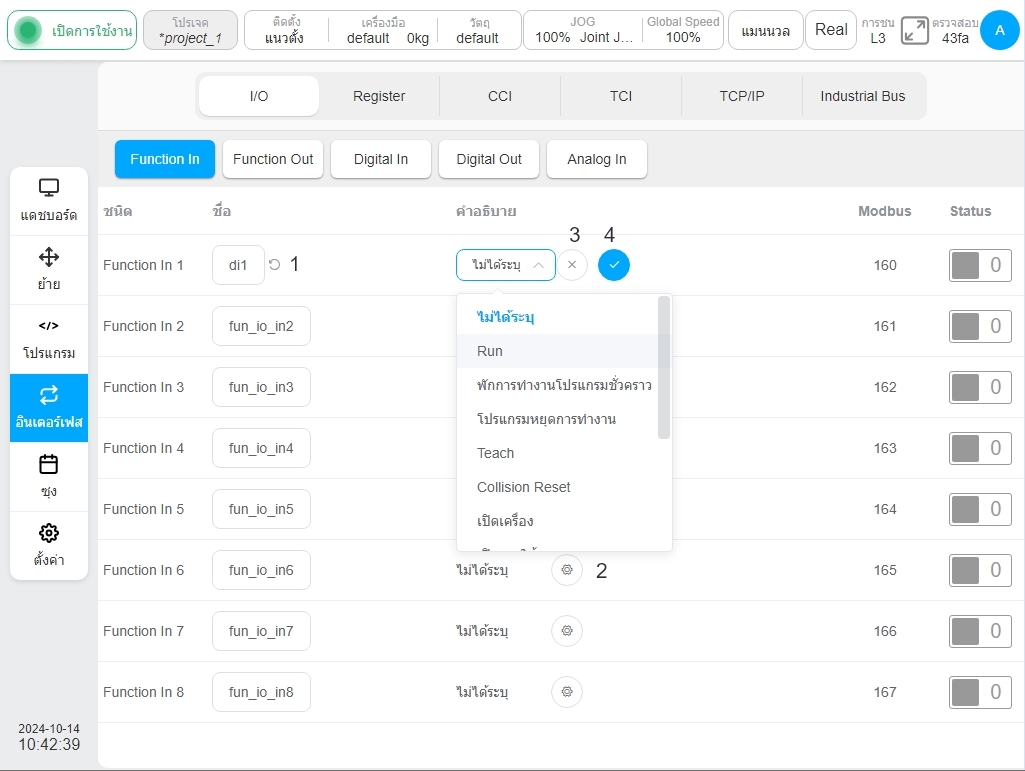
คลิกไอคอนอินพุตฟังก์ชันที่เกี่ยวข้อง ② ในรูป ตัวเลือกการตั้งค่าฟังก์ชัน ไอคอน ③ และไอคอน ④ จะปรากฏขึ้น และผู้ใช้สามารถเลือกการตั้งค่าฟังก์ชันของอินพุตฟังก์ชันได้ เลือกฟังก์ชันในกล่องดรอปดาวน์ตัวเลือกฟังก์ชันการแสดงผล และป้อนรายการฟังก์ชันที่คุณต้องการตั้งค่า คลิกไอคอน ④ เพื่อกําหนดรายการฟังก์ชันที่เลือก คุณยังสามารถยกเลิกการเลือกคุณสมบัติที่เลือกได้โดยคลิกไอคอน ③ เมื่อสัญญาณอินพุตฟังก์ชันถูกทริกเกอร์ ฟังก์ชันที่ตั้งไว้จะเปิดใช้งาน ปัจจุบัน อินพุตฟังก์ชันรองรับฟังก์ชันต่อไปนี้: วิ่ง , พักการทำงานโปรแกรมชั่วคราว, โปรแกรมหยุดการทำงาน, สอน, ตั้งค่าการชนใหม่, เปิดเครื่อง, เปิดการใช้งาน, ปิดการใช้งาน, ปิดเครื่อง, ปิดการทำงาน, บันทึกท่า, บ้าน, ยกเลิกการเคลื่อนไหว
Note
วิ่ง, พักการทำงานโปรแกรมชั่วคราว, โปรแกรมหยุดการทำงาน, ยกเลิกการเคลื่อนไหว ถูกกระตุ้นโดยสัญญาณทริกเกอร์ขอบที่เพิ่มขึ้น
Note
คําสั่งยกเลิกการย้ายจะใช้ผลเฉพาะกับงานย้ายที่กําลังดําเนินการโดยหุ่นยนต์เมื่อสัญญาณคําสั่งถูกทริกเกอร์ หากโปรแกรมกําลังทํางาน สคริปต์ต่อไปนี้จะทํางานอย่างต่อเนื่อง
อินเทอร์เฟซเอาต์พุตฟังก์ชันสามารถตรวจสอบสถานะและข้อมูลพื้นฐานของเอาต์พุตดิจิตอล 8 ทางที่สามารถตั้งค่าฟังก์ชันบางอย่างในตู้ควบคุมดังแสดงในรูป เช่นเดียวกับอินเทอร์เฟซอินพุตฟังก์ชัน คุณสามารถแก้ไขชื่อที่สอดคล้องกันของเอาต์พุตฟังก์ชันและเลือกการตั้งค่าฟังก์ชันของเอาต์พุตฟังก์ชันได้ ในกล่องดรอปดาวน์ตัวเลือกการตั้งค่าฟังก์ชัน ให้เลือกปริมาณสถานะของระบบที่กําหนดไว้ล่วงหน้าที่ผูกไว้กับเอาต์พุตของฟังก์ชัน หลังจากคลิกไอคอน 'ตกลง' เอาต์พุตฟังก์ชันจะแสดงสถานะของปริมาณสถานะระบบที่ตั้งไว้ ปัจจุบัน เอาต์พุตฟังก์ชันรองรับสถานะการผูก: ว่างเปล่า, กำลังทำงาน, พักชั่วคราว, เสร็จสิ้น, ถอดการเชื่อมต่อโพรฟิเน็ต, บ้าน, การชน, โหมด Auto, ปิดเครื่อง, ปิดการใช้งาน, หุ่นยนต์เคลื่อนที่, ตัดการเชื่อมต่ออีเทอร์เน็ต, พลังงานหุ่นยนต์, การจัดการ, ยกเลิกการเคลื่อนไหว.
Note
สัญญาณ ยกเลิกการเคลื่อนไหว จะเป็นจริงก็ต่อเมื่อหุ่นยนต์กําลังทํางานย้ายอยู่ และงานเคลื่อนไหวถูกยกเลิกโดยคําสั่งยกเลิกงานย้ายจากอินพุต IO ฟังก์ชัน อินพุตการลงทะเบียนฟังก์ชัน หรืออินเทอร์เฟซอื่นๆ สัญญาณ Move Task Aborted สามารถรีเซ็ตได้ผ่านการรีเซ็ตอินพุต IO ของฟังก์ชันหรืออินพุตการลงทะเบียนฟังก์ชัน ซึ่งกําหนดค่าเป็นแหล่งที่มาของคําสั่งยกเลิกการย้ายงาน และเอาต์พุต IO ของฟังก์ชันจะถูกรีเซ็ตต่ําในเวลาเดียวกัน
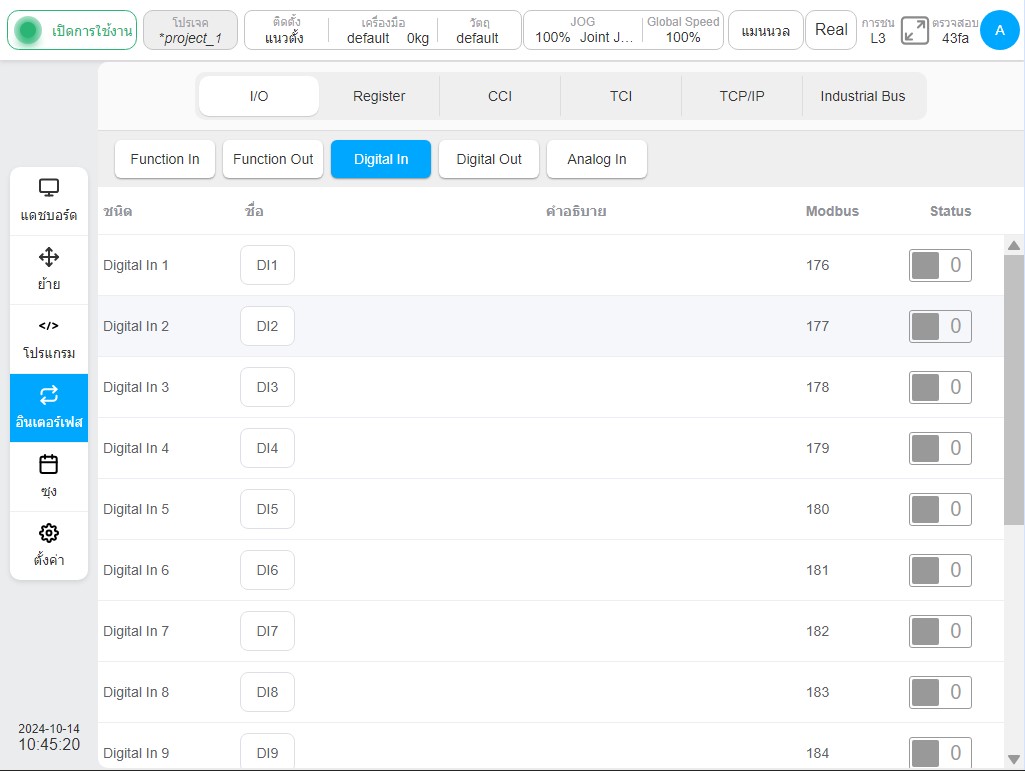
อินเทอร์เฟซอินพุตทั่วไปสามารถตรวจสอบสถานะและข้อมูลพื้นฐานของอินพุตดิจิทัล 16 ทางทั่วไปในตู้ควบคุม ดังที่แสดงในรูปภาพ ต่างจากอินเทอร์เฟซอินพุตฟังก์ชันและเอาต์พุตฟังก์ชัน สามารถแก้ไขได้เฉพาะชื่อที่สอดคล้องกันและการคืนค่าสัญญาณอินพุตที่แก้ไข และไม่สามารถตั้งค่าฟังก์ชันเฉพาะได้
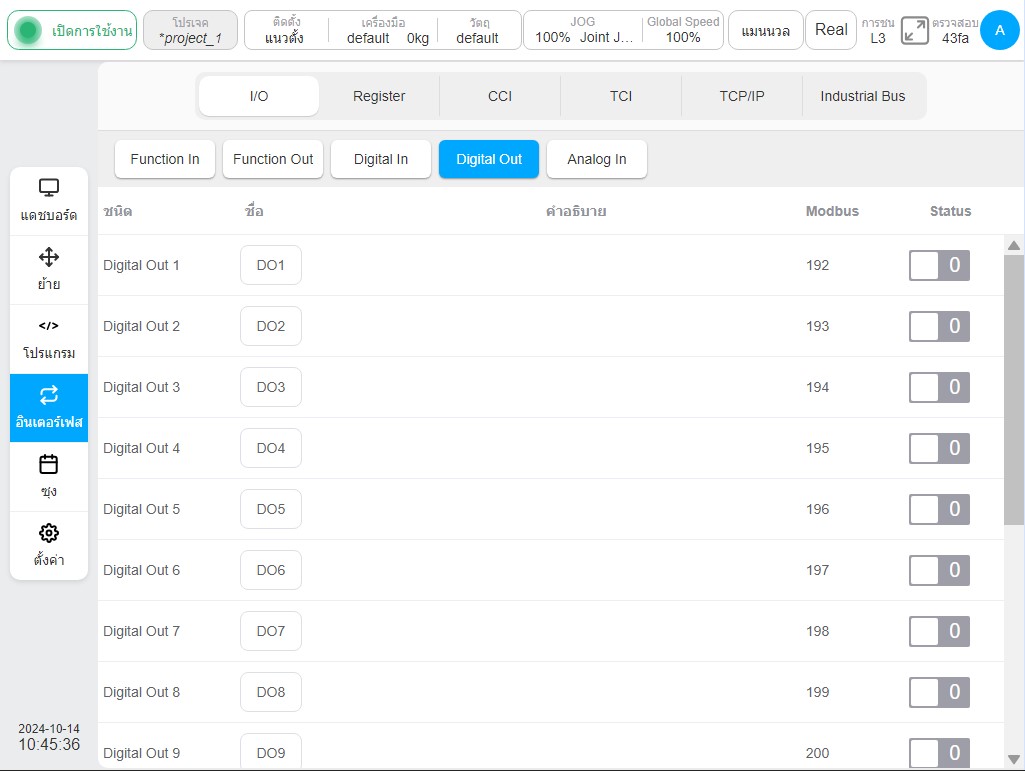
อินเทอร์เฟซเอาต์พุตทั่วไปสามารถตรวจสอบสถานะและข้อมูลพื้นฐานของเอาต์พุตดิจิทัล 16 ช่องสัญญาณทั่วไปในตู้ควบคุมได้ ดังที่แสดงในรูปภาพ อินเทอร์เฟซสามารถแก้ไขชื่อที่สอดคล้องกันและคืนค่าสัญญาณเอาต์พุตได้หลังจากแก้ไขเท่านั้น และไม่สามารถตั้งค่าฟังก์ชันเฉพาะได้
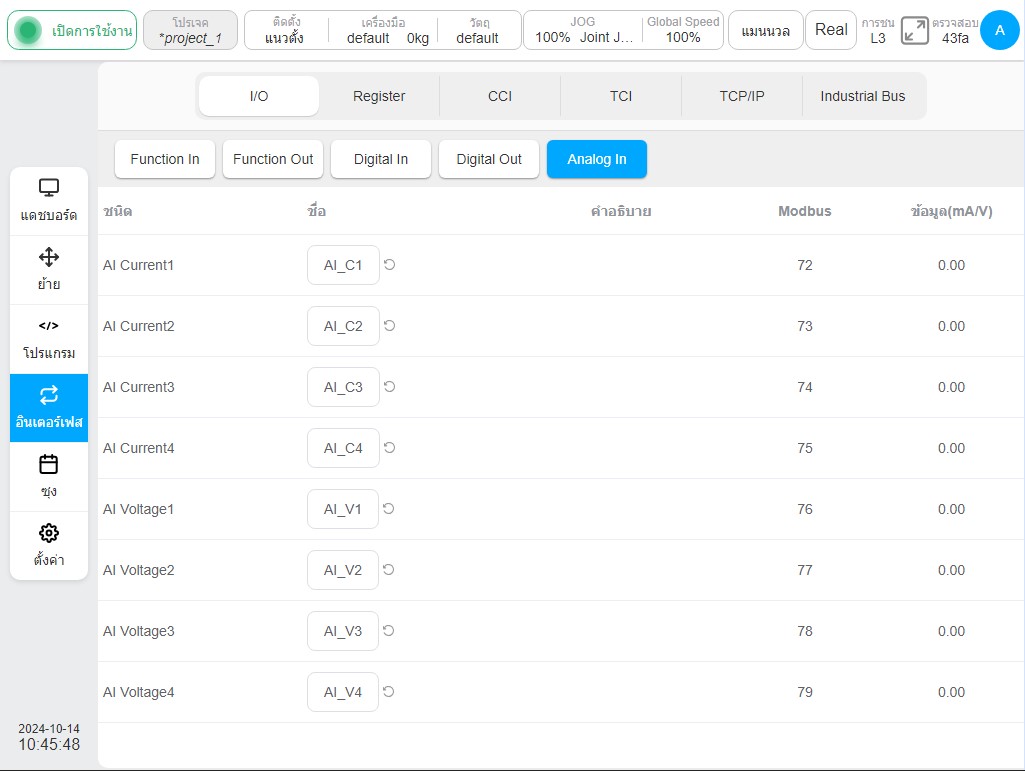
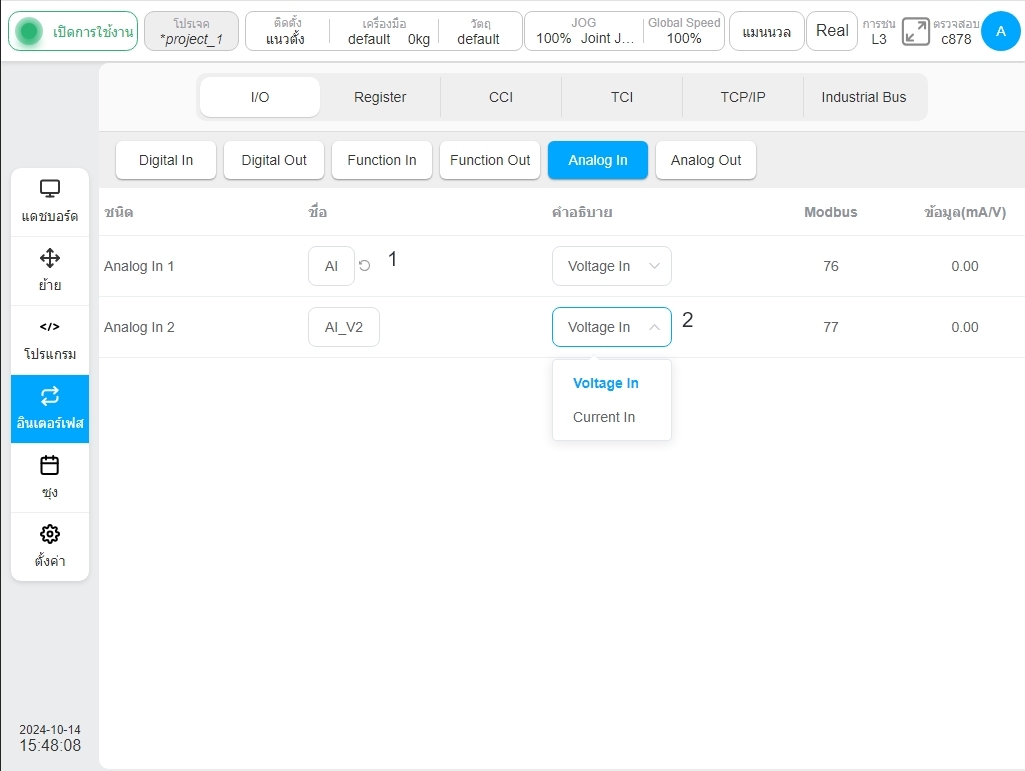
อินเทอร์เฟซแอนะล็อกสามารถตรวจสอบสัญญาณอินพุตกระแสแอนะล็อก 4 สัญญาณและสัญญาณอินพุตแรงดันไฟฟ้าแอนะล็อก 4 สัญญาณ ดังที่แสดงในรูปภาพ ในทำนองเดียวกัน ให้คลิกกล่องแสดงชื่อสัญญาณอินพุตแอนะล็อกเพื่อแก้ไขชื่อสัญญาณ การทำงานจะคล้ายกับ I/O ฟังก์ชันและ I/O ทั่วไปที่อธิบายไว้ข้างต้น และจะไม่ทำซ้ำที่นี่
สำหรับตู้ควบคุม DC00 / DC15S-J9 / DC30D-J9 มีอินพุตทั่วไป เอาต์พุตทั่วไป อินพุตฟังก์ชัน เอาต์พุตฟังก์ชัน อินพุตอะนาล็อก และเอาต์พุตอะนาล็อก 6 ประเภทในหน้าย่อย I/O คลิกแถบป้ายกำกับที่แตกต่างกันเพื่อสลับและแสดงข้อมูลสถานะอินพุตหรือเอาต์พุต 6 ประเภท
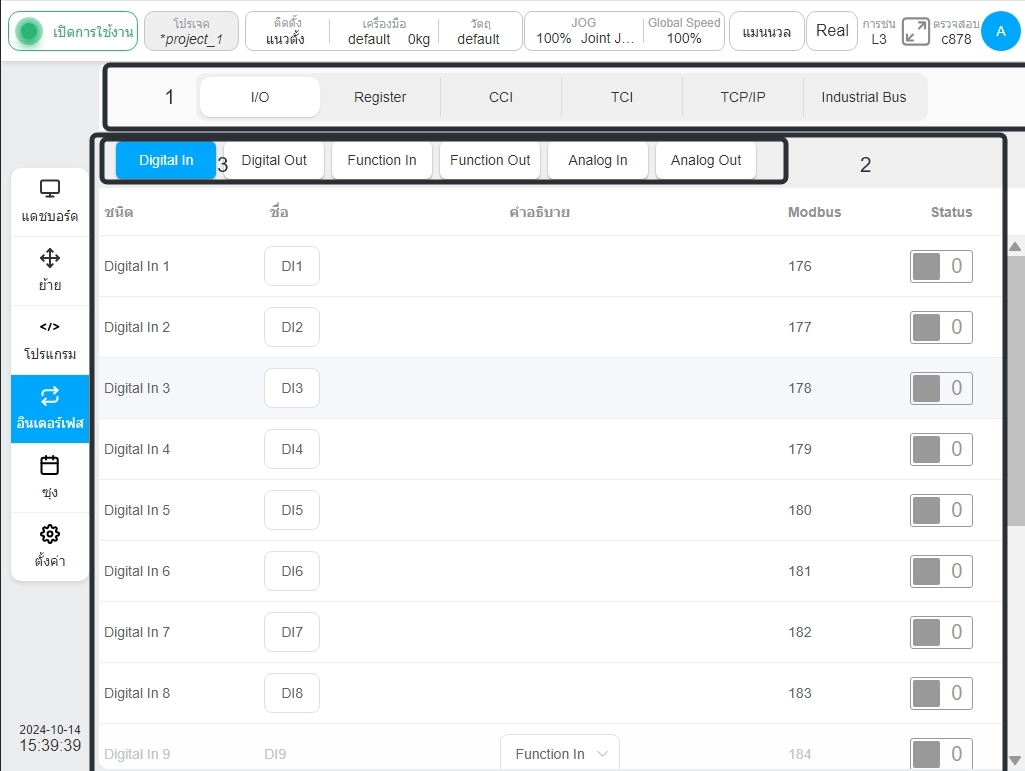
อินเทอร์เฟซอินพุตทั่วไปสามารถตรวจสอบสถานะและข้อมูลพื้นฐานของอินพุตดิจิทัล 16 ทางทั่วไปในตู้ควบคุมได้ ดังที่แสดงในรูปภาพ อินพุตดิจิทัล 8 ประเภท DI9 ถึง DI16 สามารถกำหนดค่าเป็นอินพุตฟังก์ชันหรืออินพุตทั่วไปในคอลัมน์คำอธิบาย ① ของหน้าได้
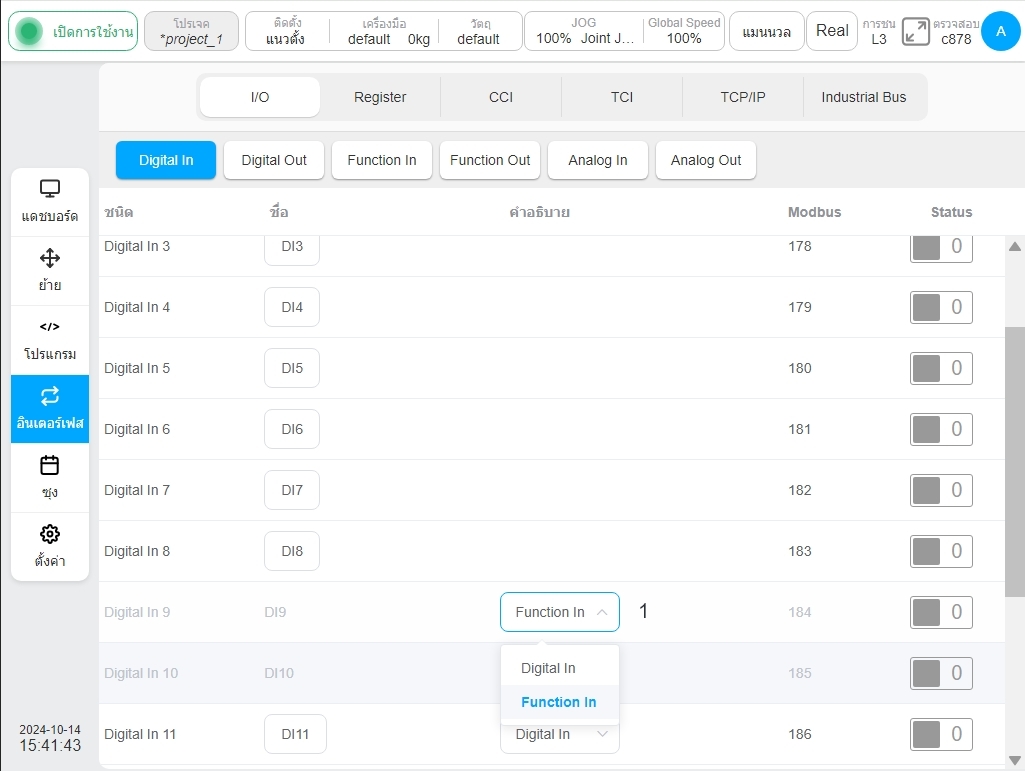
หากผู้ใช้เลือกอินพุตหลักแต่ละหลักเป็นอินพุตฟังก์ชัน สถานะอินพุตหลักจะถูกปิดใช้งานในหน้าอินพุตทั่วไป I/O และสถานะหลักที่กำหนดค่าเป็นอินพุตฟังก์ชันจะแสดงในหน้าย่อยอินพุตฟังก์ชัน ตัวอย่างเช่น หาก DI9 และ DI10 ถูกกำหนดค่าให้เป็นอินพุตฟังก์ชัน หน้าแท็บอินพุตฟังก์ชันภายใต้หน้าย่อย I/O จะแสดงในรูปต่อไปนี้
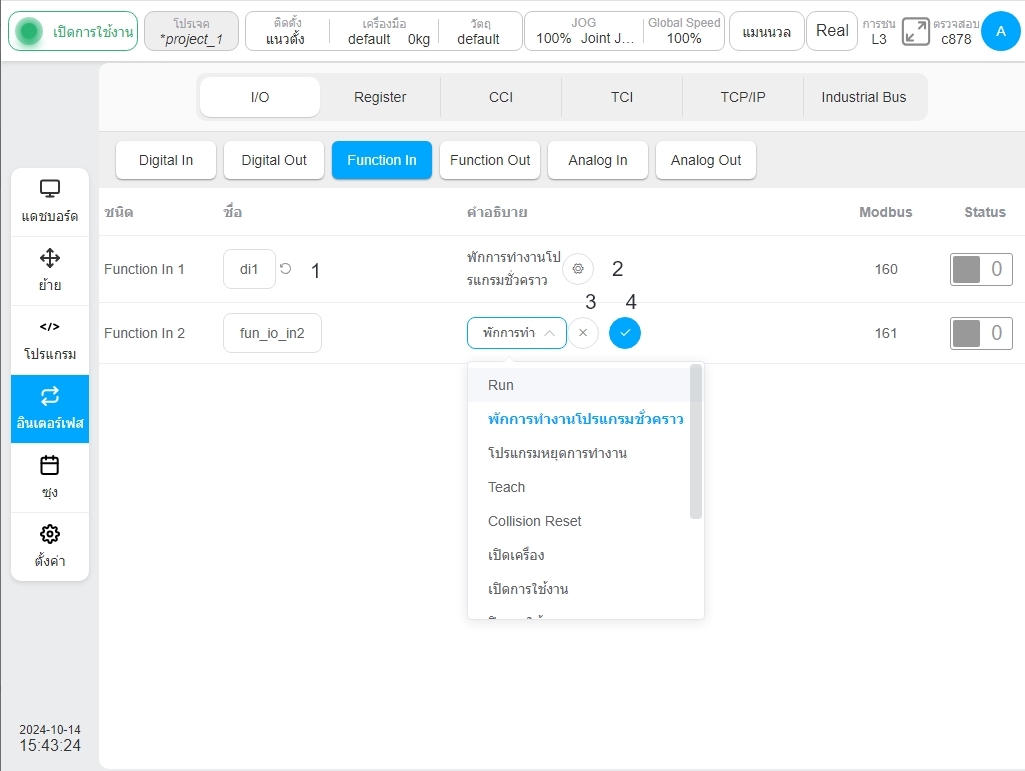
ในทำนองเดียวกัน การคลิกชื่ออินพุตฟังก์ชันจะแสดงแป้นพิมพ์เสมือนปกติ และผู้ใช้สามารถแก้ไขชื่อเริ่มต้นของอินพุตฟังก์ชันได้ หลังจากที่คุณป้อนชื่อเริ่มต้นสำหรับฟังก์ชันที่แก้ไขแล้ว ไอคอน ① ในรูปด้านบนจะแสดงขึ้นทางด้านขวาของกล่องแสดงชื่อ คลิกไอคอนเพื่อคืนค่าชื่ออินพุตฟังก์ชันเป็นชื่อเริ่มต้นที่สอดคล้องกัน
คลิกไอคอนอินพุตฟังก์ชัน ② ที่สอดคล้องกันในรูป ตัวเลือกการตั้งค่าฟังก์ชัน ไอคอน ③ และไอคอน ④ จะปรากฏขึ้น และคุณสามารถเลือกการตั้งค่าฟังก์ชันของอินพุตฟังก์ชันได้ เลือกฟังก์ชันในกล่องดร็อปดาวน์ตัวเลือกฟังก์ชันการแสดงผล และป้อนรายการฟังก์ชันที่คุณต้องการตั้งค่า คลิกไอคอน ④ เพื่อระบุรายการฟังก์ชันที่เลือก ผู้ใช้ยังสามารถยกเลิกการเลือกคุณลักษณะที่เลือกได้โดยคลิกไอคอน ③ เมื่อสัญญาณอินพุตฟังก์ชันถูกทริกเกอร์ ฟังก์ชันที่ตั้งค่าไว้จะเปิดใช้งาน อินพุตฟังก์ชันปัจจุบันรองรับฟังก์ชันต่อไปนี้: ว่าง, กำลังทำงาน, หยุดชั่วคราว, เสร็จสิ้น, ตัดการเชื่อมต่อโปรฟิเน็ต, โฮม, การชน, โหมดอัตโนมัติ, ปิดเครื่อง, ปิดใช้งาน, หุ่นยนต์เคลื่อนที่, ตัดการเชื่อมต่ออีเทอร์เน็ต, พลังงานหุ่นยนต์
Note
การรัน, หยุดชั่วคราว, หยุด จะถูกเรียกใช้โดยสัญญาณทริกเกอร์ขอบที่เพิ่มขึ้น
อินเทอร์เฟซเอาต์พุตสากลสามารถตรวจสอบสถานะและข้อมูลพื้นฐานของเอาต์พุตดิจิทัล 16 ช่องสัญญาณทั่วไปในตู้ควบคุมได้ ดังที่แสดงในรูปภาพ ประเภทอินพุตดิจิทัล DO9-DO16 สามารถกำหนดค่าเป็นอินพุตฟังก์ชันหรืออินพุตทั่วไปในคอลัมน์คำอธิบาย ① ของหน้า
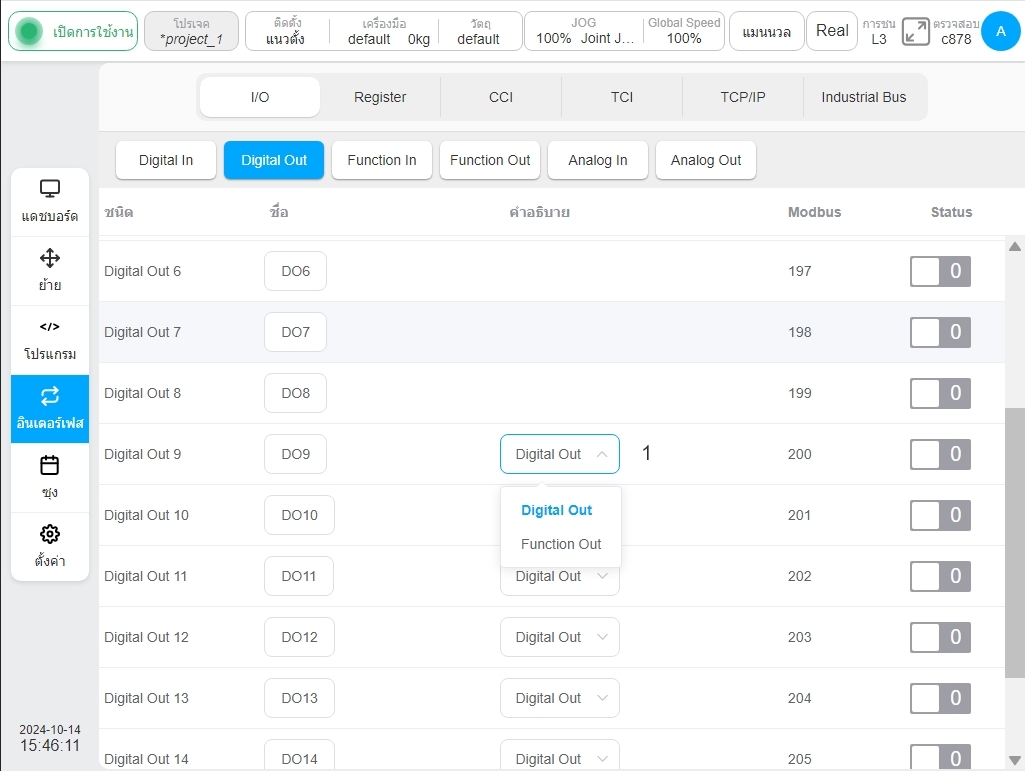
ในทำนองเดียวกัน หากเลือกเอาต์พุตดิจิทัลทั่วไปแต่ละรายการเป็นเอาต์พุตฟังก์ชัน เอาต์พุตดิจิทัลของเส้นทางนี้จะแสดงเป็นปิดใช้งานในหน้าเอาต์พุตทั่วไป I/O และสถานะดิจิทัลของแต่ละเส้นทางที่กำหนดค่าเป็นเอาต์พุตฟังก์ชันจะแสดงบนหน้าแท็บย่อยเอาต์พุตฟังก์ชัน ตัวอย่างเช่น DO9, DO10, DO11 และ DO12 จะถูกกำหนดค่าเป็นเอาต์พุตฟังก์ชัน รูปต่อไปนี้แสดงหน้าแท็บเอาต์พุตฟังก์ชันของหน้าย่อย I/O
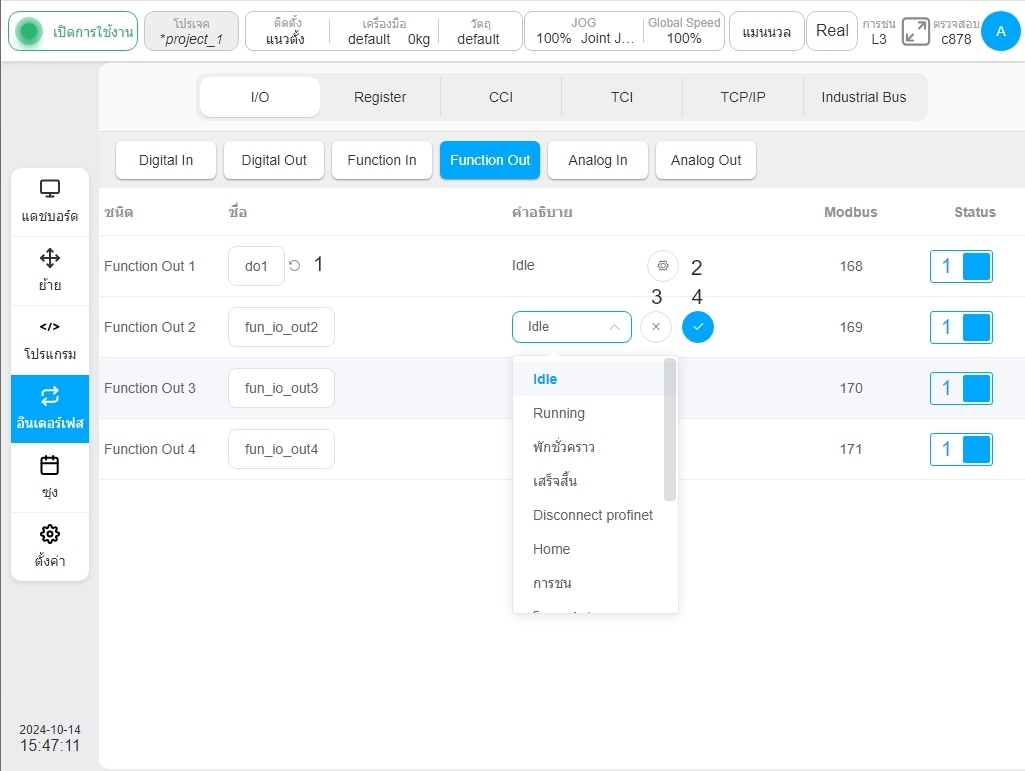
ในลักษณะเดียวกับแท็บอินพุตฟังก์ชัน ให้คลิกชื่อเอาต์พุตฟังก์ชัน แล้วแป้นพิมพ์เสมือนทั่วไปจะปรากฏขึ้น ผู้ใช้สามารถแก้ไขชื่อเริ่มต้นของเอาต์พุตฟังก์ชันได้ หลังจากเปลี่ยนชื่อเอาต์พุตฟังก์ชันเริ่มต้นแล้ว ไอคอน ① ในรูปด้านบนจะแสดงขึ้นที่ด้านขวาของกล่องแสดงชื่อ คลิกไอคอนเพื่อคืนค่าชื่อเอาต์พุตฟังก์ชันเป็นชื่อเริ่มต้น
คลิกไอคอนเอาต์พุตฟังก์ชัน ② ที่สอดคล้องกันในรูป ตัวเลือกการตั้งค่าฟังก์ชัน ไอคอน ③ และไอคอน ④ จะปรากฏขึ้น และสามารถเลือกการตั้งค่าฟังก์ชันของเอาต์พุตฟังก์ชันได้ ในกล่องดร็อปดาวน์ตัวเลือกฟังก์ชันการแสดงผล ให้เลือกไอเท็มฟังก์ชันที่เอาต์พุตฟังก์ชันต้องการตั้งค่า คลิกไอคอน ④ เพื่อระบุไอเท็มฟังก์ชันที่เลือก นอกจากนี้ ผู้ใช้ยังสามารถยกเลิกการเลือกฟีเจอร์ที่เลือกได้โดยคลิกไอคอน ③ เมื่อสัญญาณเอาต์พุตฟังก์ชันถูกทริกเกอร์ ฟังก์ชันที่ตั้งค่าไว้จะเริ่มทำงาน ในปัจจุบัน เอาต์พุตฟังก์ชันรองรับฟังก์ชันต่อไปนี้: สถานะว่าง สถานะการทำงานของโปรแกรม สถานะหยุดชั่วคราว โปรแกรมสิ้นสุด การตัดการเชื่อมต่อแบบโปรฟิเน็ต ตำแหน่งโฮม การชน โหมดอัตโนมัติ ไม่เปิดเครื่อง ไม่เปิดใช้งาน การเคลื่อนไหวของหุ่นยนต์ การตัดการเชื่อมต่ออีเทอร์เน็ต/ไอพี สถานะพลังงานของหุ่นยนต์ 48V
อินเทอร์เฟซอินพุตแอนะล็อกสามารถตรวจสอบสัญญาณอินพุตแอนะล็อก 2 สัญญาณ ดังที่แสดงในรูปภาพ ในทำนองเดียวกัน ให้คลิกที่กล่องแสดงชื่อสัญญาณอินพุตแอนะล็อกเพื่อแก้ไขชื่อสัญญาณ หลังจากแก้ไขชื่อเริ่มต้นของอินพุตแอนะล็อกแล้ว ไอคอน ① ในภาพจะปรากฏที่ด้านขวาของกล่องแสดงชื่อ คลิกไอคอนเพื่อคืนค่าชื่ออินพุตแอนะล็อกเป็นชื่อเริ่มต้นที่สอดคล้องกัน และสามารถอธิบายสัญญาณอินพุตแอนะล็อกได้ในไอคอน ② คอลัมน์คำอธิบาย เพื่อเลือกอินพุตแรงดันไฟหรืออินพุตกระแสไฟ
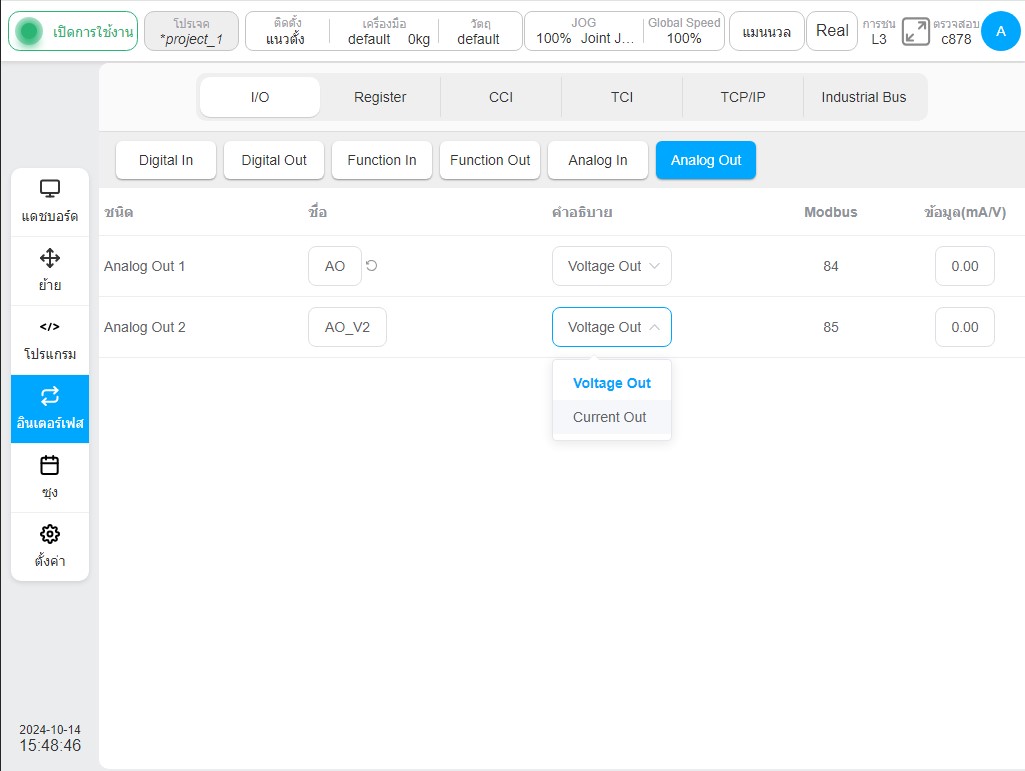
อินเทอร์เฟซเอาต์พุตแอนะล็อกสามารถตรวจสอบสัญญาณเอาต์พุตแอนะล็อก 2 สัญญาณ ดังที่แสดงในรูปภาพ ในทำนองเดียวกัน ให้คลิกที่กล่องแสดงชื่อสัญญาณอินพุตแอนะล็อกเพื่อแก้ไขชื่อสัญญาณ การทำงานจะคล้ายกับอินพุตแอนะล็อกที่อธิบายไว้ข้างต้นและจะไม่ทำซ้ำที่นี่ และสัญญาณเอาท์พุตแอนะล็อกสามารถอธิบายได้ในการเลือกการกำหนดค่าคอลัมน์คำอธิบาย ผู้ใช้สามารถเลือกเอาท์พุตแรงดันไฟหรือเอาท์พุตกระแสไฟได้
ลงทะเบียน#
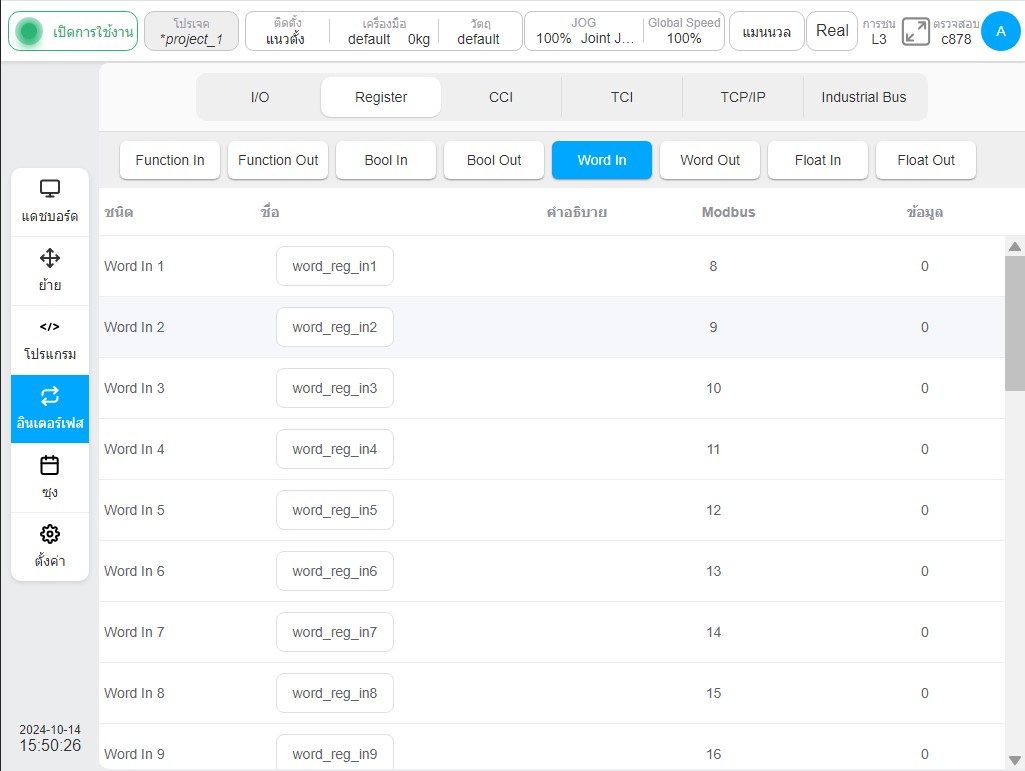
หน้าย่อยลงทะเบียนนั้นคล้ายกับหน้าย่อย I/O ส่วนบนของหน้านั้นมีป้ายกำกับสำหรับอินพุตและเอาต์พุตประเภทต่างๆ ซึ่งได้แก่ อินพุตฟังก์ชัน เอาต์พุตฟังก์ชัน อินพุตบูลีน เอาต์พุตบูลีน อินพุตเวิร์ด เอาต์พุตเวิร์ด อินพุตลอยตัว และเอาต์พุตลอยตัว รวมทั้งหมด 8 ประเภท คลิกที่แท็บต่างๆ เพื่อสลับการแสดงข้อมูลอินพุตหรือเอาต์พุตทั้ง 8 ประเภท
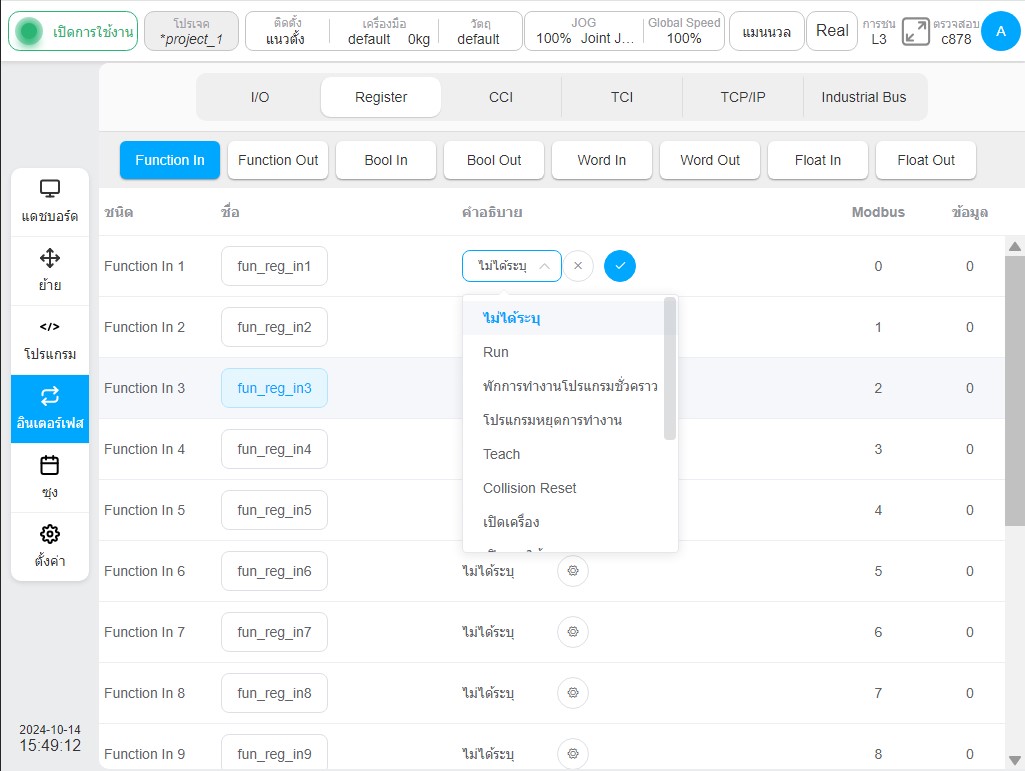
อินเทอร์เฟซอินพุตฟังก์ชันลงทะเบียนสามารถตรวจสอบข้อมูลสถานะของรีจิสเตอร์อินพุตฟังก์ชัน 16 ตัวภายในหุ่นยนต์ได้ ดังที่แสดงในรูปภาพ เช่นเดียวกับอินพุตฟังก์ชันของหน้าย่อย I/O ชื่ออินพุตฟังก์ชันสามารถปรับเปลี่ยนและเรียกคืนได้หลังจากปรับเปลี่ยน และสามารถตั้งค่ารายการฟังก์ชันเฉพาะสำหรับสัญญาณลงทะเบียนประเภทนี้ได้ รายการฟังก์ชันที่รองรับอินพุตฟังก์ชันลงทะเบียนในปัจจุบันนั้นเหมือนกับฟังก์ชันสนับสนุนอินพุตฟังก์ชันในหน้าย่อย I/O ข้างต้น
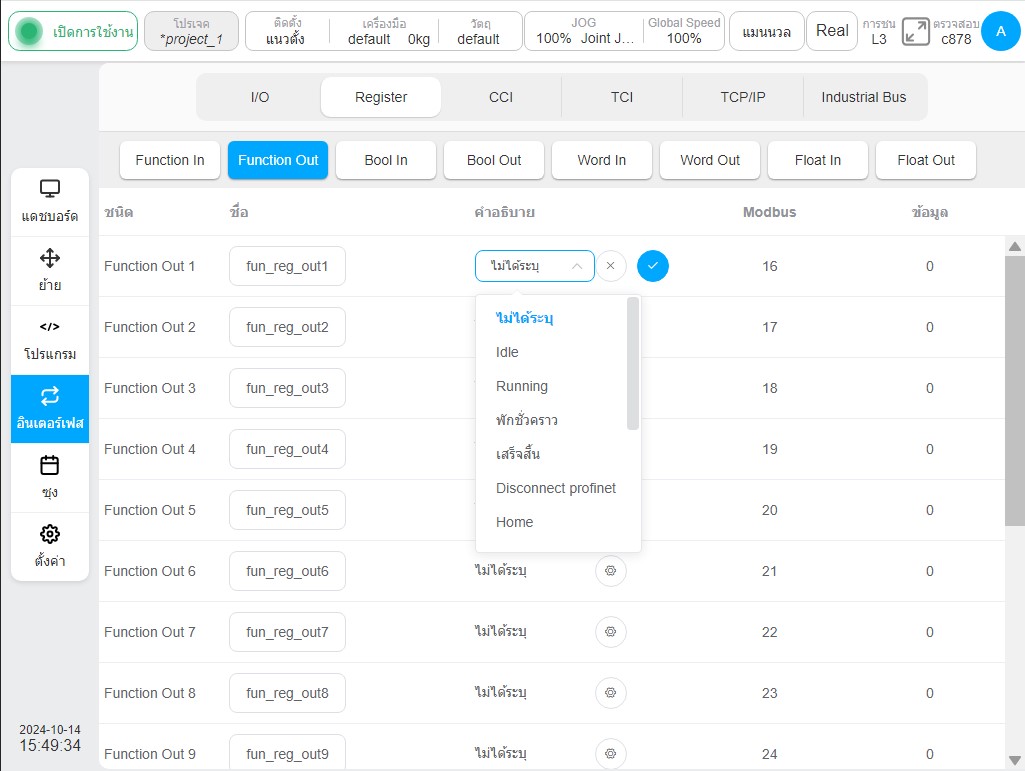
อินเทอร์เฟซเอาต์พุตฟังก์ชันรีจิสเตอร์สามารถตรวจสอบข้อมูลสถานะของรีจิสเตอร์เอาต์พุตฟังก์ชัน 16 ตัวภายในหุ่นยนต์ได้ ดังที่แสดงในรูปภาพ เช่นเดียวกับเอาต์พุตฟังก์ชันของซับเพจ I/O ชื่อเอาต์พุตฟังก์ชันสามารถปรับเปลี่ยนและเรียกคืนได้หลังจากปรับเปลี่ยน และสัญญาณรีจิสเตอร์คลาสสามารถผูกกับปริมาณสถานะที่กำหนดไว้ล่วงหน้าของระบบได้ ปัจจุบัน สถานะการผูกที่รองรับโดยเอาต์พุตของฟังก์ชันการลงทะเบียน ได้แก่ ว่างเปล่า, กำลังทำงาน, พักชั่วคราว, เสร็จสิ้น, ถอดการเชื่อมต่อโพรฟิเน็ต, บ้าน, การชน, โหมด Auto, ปิดเครื่อง, ปิดการใช้งาน, หุ่นยนต์เคลื่อนที่, ตัดการเชื่อมต่ออีเทอร์เน็ต, พลังงานหุ่นยนต์, การจัดการ, ยกเลิกการเคลื่อนไหว.
Note
สัญญาณ ยกเลิกการเคลื่อนไหว จะเป็นจริงก็ต่อเมื่อหุ่นยนต์กําลังทํางานย้ายอยู่ และงานเคลื่อนไหวถูกยกเลิกโดยคําสั่งยกเลิกงานย้ายจากอินพุต IO ฟังก์ชัน อินพุตการลงทะเบียนฟังก์ชัน หรืออินเทอร์เฟซอื่นๆ สัญญาณ ยกเลิกการเคลื่อนไหว สามารถรีเซ็ตได้ผ่านการรีเซ็ตอินพุต IO ของฟังก์ชันหรืออินพุตการลงทะเบียนฟังก์ชัน ซึ่งกําหนดค่าเป็นแหล่งที่มาของคําสั่งยกเลิกการย้ายงาน และเอาต์พุตการลงทะเบียนฟังก์ชันจะถูกรีเซ็ตต่ําในเวลาเดียวกัน
อินเทอร์เฟซอินพุตบูลีนของรีจิสเตอร์ แสดงข้อมูลสถานะของรีจิสเตอร์อินพุตบูลีน 64 ตัว อินเทอร์เฟซสามารถปรับเปลี่ยนและเรียกคืนชื่อรีจิสเตอร์หลังจากปรับเปลี่ยน และไม่สามารถตั้งค่ารายการฟังก์ชันเฉพาะได้
อินเทอร์เฟซเอาต์พุตบูลีนของรีจิสเตอร์ แสดงข้อมูลสถานะของรีจิสเตอร์เอาต์พุตบูลีน 64 ตัว ในทำนองเดียวกัน อินเทอร์เฟซสามารถแก้ไขและกู้คืนชื่อรีจิสเตอร์ได้หลังจากแก้ไขเท่านั้น และไม่สามารถตั้งค่ารายการฟังก์ชันเฉพาะได้
อินเทอร์เฟซอินพุตคำของรีจิสเตอร์และอินเทอร์เฟซอินพุตลอยตัวแสดงข้อมูลสถานะรีจิสเตอร์อินพุตชนิด 32 ไบต์และอินพุตจุดลอยตัว 32 ตามลำดับ อินเทอร์เฟซเหล่านี้สามารถแก้ไขชื่อรีจิสเตอร์และแก้ไขการกู้คืนเท่านั้น ไม่มีฟังก์ชันเฉพาะในการตั้งค่า และไม่สามารถใช้งานกล่องแสดงข้อมูลคอลัมน์ข้อมูลได้
อินเทอร์เฟซเอาต์พุตคำของรีจิสเตอร์และอินเทอร์เฟซเอาต์พุตลอยตัวแสดงข้อมูลสถานะของรีจิสเตอร์เอาต์พุตชนิด 32 ไบต์และรีจิสเตอร์เอาต์พุตชนิดจุดลอยตัว 32 ตามลำดับ คล้ายกับอินเทอร์เฟซเอาต์พุตของรีจิสเตอร์บูลีน อินเทอร์เฟซเหล่านี้สามารถแก้ไขชื่อรีจิสเตอร์และกู้คืนได้หลังจากแก้ไข และยังสามารถใช้งานกล่องแสดงข้อมูลคอลัมน์ข้อมูลได้อีกด้วย
CCI#
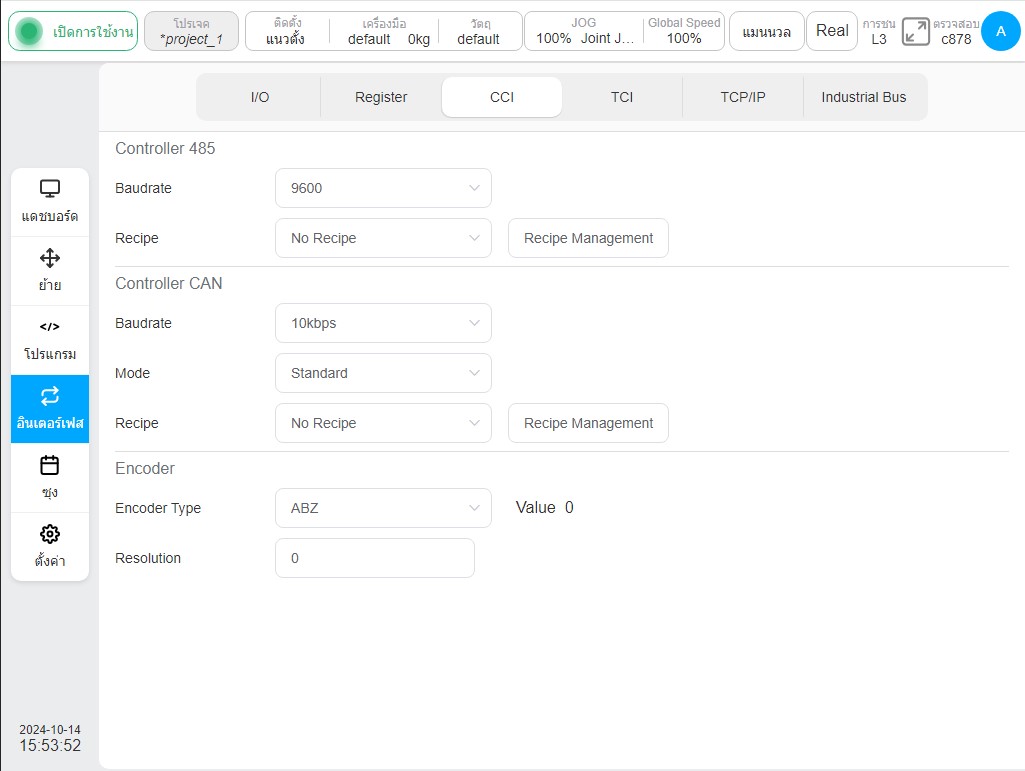
หน้าย่อย CCI มีไว้สำหรับกำหนดค่าพอร์ต 485 พอร์ต CAN และอินเทอร์เฟซตัวเข้ารหัสของตู้ควบคุม โดยหลักแล้วจะใช้เพื่อตั้งค่าบอดเรทและการกำหนดค่าโหมด สูตร และตั้งค่าประเภทตัวเข้ารหัสของพอร์ต 485 และพอร์ต CAN ของตู้ควบคุม ดังแสดงในรูปภาพ
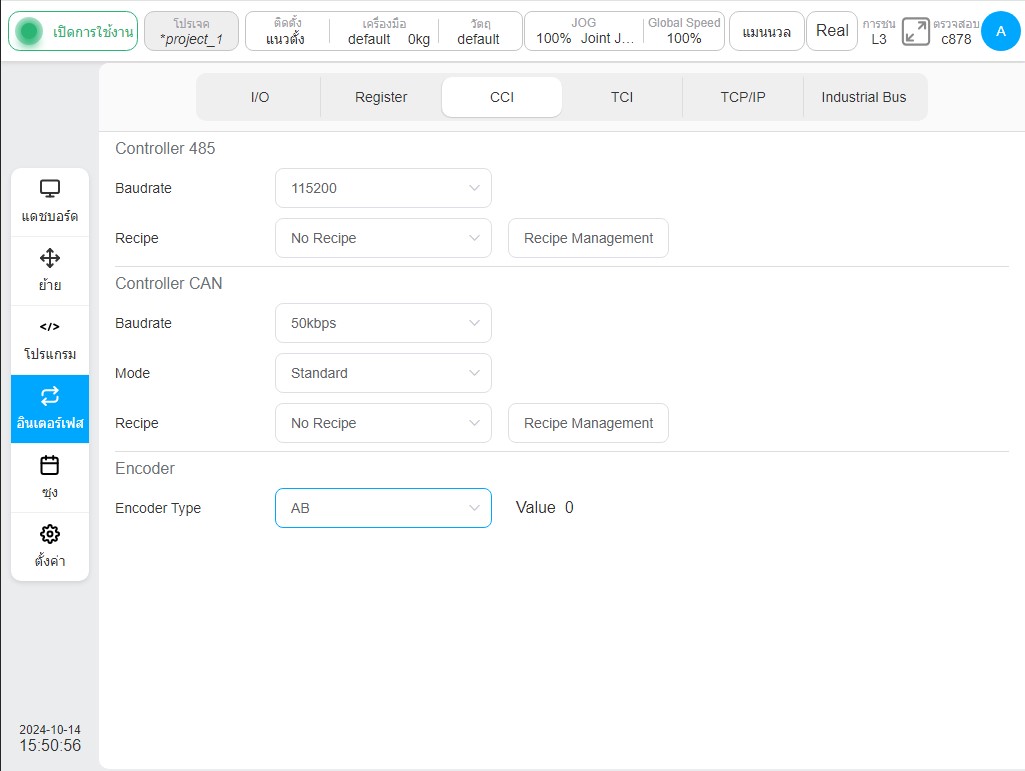
บอดเรทสำหรับพอร์ต 485 ของตู้ควบคุมสามารถเลือกได้จากรายการดร็อปดาวน์ตัวเลือกบอดเรท พอร์ต 485 รองรับบอดเรท 9600, 19200, 38400, 57600 และ 115200 เลือกไฟล์สูตรสำหรับพอร์ตในกล่องดร็อปดาวน์ตัวเลือกสูตร
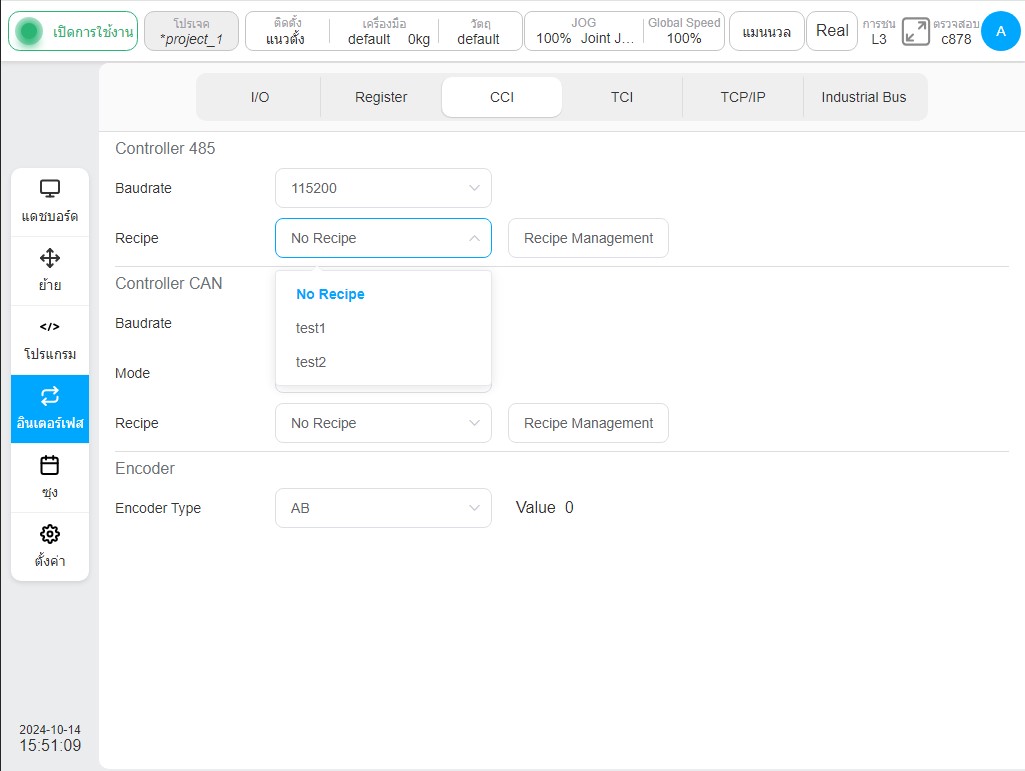
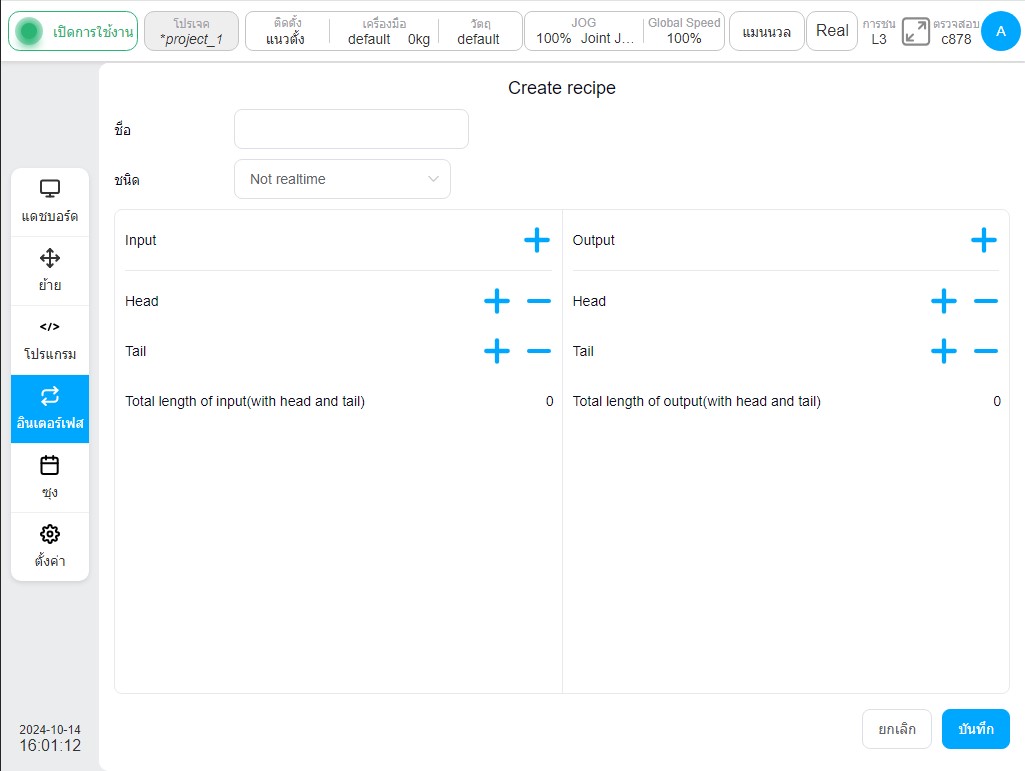
ดังแสดงในรูปภาพด้านบน กล่องดร็อปดาวน์จะแสดงชื่อไฟล์สูตรที่ผู้ใช้กำหนด คลิกปุ่ม 'การจัดการสูตร' แล้วกล่องรายการการจัดการสูตรจะปรากฏขึ้น อินเทอร์เฟซจะแสดงไฟล์สูตรที่มีอยู่ในโครงการปัจจุบัน ผู้ใช้สามารถเพิ่ม ลบ และแก้ไขสูตรได้
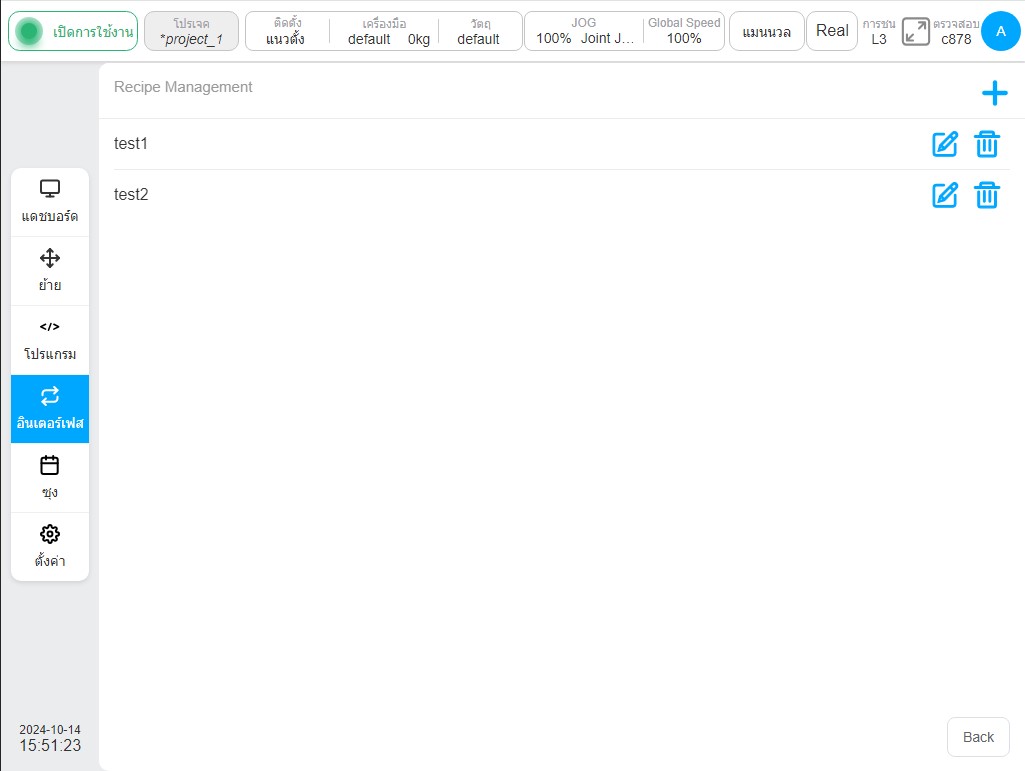
คลิกไฟล์สูตรใดๆ ในรายการสูตร กล่องป๊อปอัปที่มีปุ่ม 'แก้ไข' และ 'ลบ' จะปรากฏขึ้นทางด้านขวา ผู้ใช้สามารถแก้ไขหรือลบไฟล์สูตรที่มีอยู่ได้
บอดเรทและการตั้งค่าสูตรของพอร์ต CAN ของตู้ควบคุมนั้นคล้ายกับของพอร์ต 485 และจะไม่กล่าวถึงที่นี่ บอดเรทของพอร์ต CAN คือ 10kbps, 20kbps, 50kbps, 100kbps, 125kbps, 250kbps, 500kbps และ 1000kbps การกำหนดค่า CAN มีสองโหมด: เฟรมมาตรฐานและเฟรมขยาย
การกำหนดค่าตัวเข้ารหัสตู้ควบคุมมี 2 แบบ คือ AB และ ABZ จำนวนพัลส์ตัวเข้ารหัสที่ระบบปัจจุบันบันทึกจะแสดงอยู่ทางด้านขวาของตัวเข้ารหัส หากตั้งค่าประเภทตัวเข้ารหัสเป็น ABZ ผู้ใช้จะต้องตั้งค่าจำนวนเส้นตัวเข้ารหัสด้วย ค่าเริ่มต้นคือ 0
TCI#
หน้าย่อย TCI แสดงข้อมูล IO ของบอร์ดปลายทาง ข้อมูลเกี่ยวกับอินเทอร์เฟซที่นำกลับมาใช้ใหม่ได้ บอร์ดปลายทางมีอินพุตเครื่องมือ 2 ช่องและเอาต์พุตเครื่องมือ 2 ช่อง ซึ่งเหมือนกับสัญญาณอินพุต/เอาต์พุตเอนกประสงค์ในหน้าย่อย I/O อินเทอร์เฟซนี้ช่วยให้ผู้ใช้สามารถแก้ไขชื่ออินพุตเครื่องมือและเอาต์พุตเครื่องมือ และเรียกคืนชื่อเริ่มต้นหลังจากแก้ไข ผู้ใช้สามารถกำหนดค่าโหมดเอาต์พุตเครื่องมือ และโหมดการกำหนดค่าเอาต์พุตเครื่องมือ 2 ช่องจะถูกบังคับให้รวมกัน นั่นคือ กำหนดค่าโหมดเอาต์พุตเครื่องมือใดๆ เป็นโหมด PNP หรือโหมด NPN และโหมดเอาต์พุตเครื่องมืออื่นๆ จะถูกเปลี่ยนแปลงตามนั้น ผู้ใช้ยังสามารถตั้งค่าสถานะเอาต์พุตเครื่องมือได้ โดย 0 หมายถึงอิเล็กทรอนิกส์ระดับต่ำ และ 1 หมายถึงอิเล็กทรอนิกส์ระดับสูง ดังที่แสดงในรูปภาพ
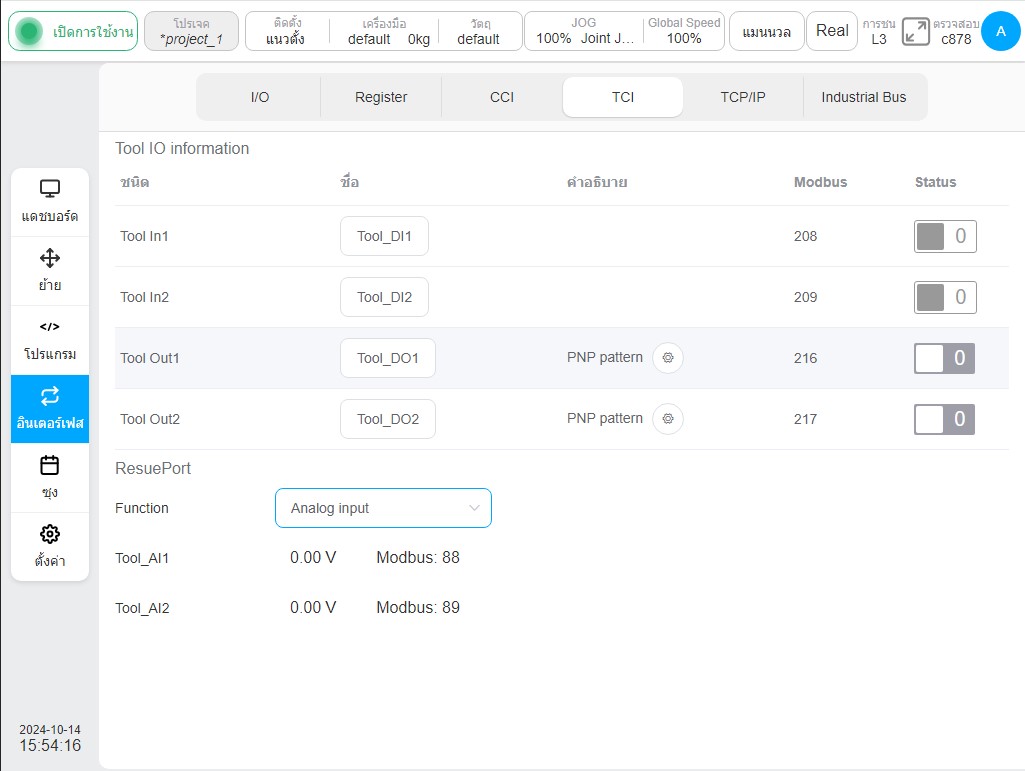
ก่อนใช้งาน ผู้ใช้สามารถกำหนดค่าฟังก์ชันอินเทอร์เฟซปลายทางเป็นอินพุตอนาล็อกหรืออินเทอร์เฟซ 485 และรับสัญญาณที่สอดคล้องกันตามการกำหนดค่า ดังที่แสดงในภาพด้านบน เมื่อตั้งค่าฟังก์ชันอินเทอร์เฟซปลายทางเป็นอินพุตอนาล็อก อินเทอร์เฟซจะแสดงข้อมูลของอินพุตแรงดันไฟฟ้าอนาล็อกสองอินพุตและที่อยู่ Modbus ที่สอดคล้องกันแบบเรียลไทม์ หากตั้งค่าอินเทอร์เฟซปลายทางเป็น 485 อินเทอร์เฟซจะแสดงข้อมูลการกำหนดค่าบอดเรตและสูตร ดังที่แสดงในภาพต่อไปนี้
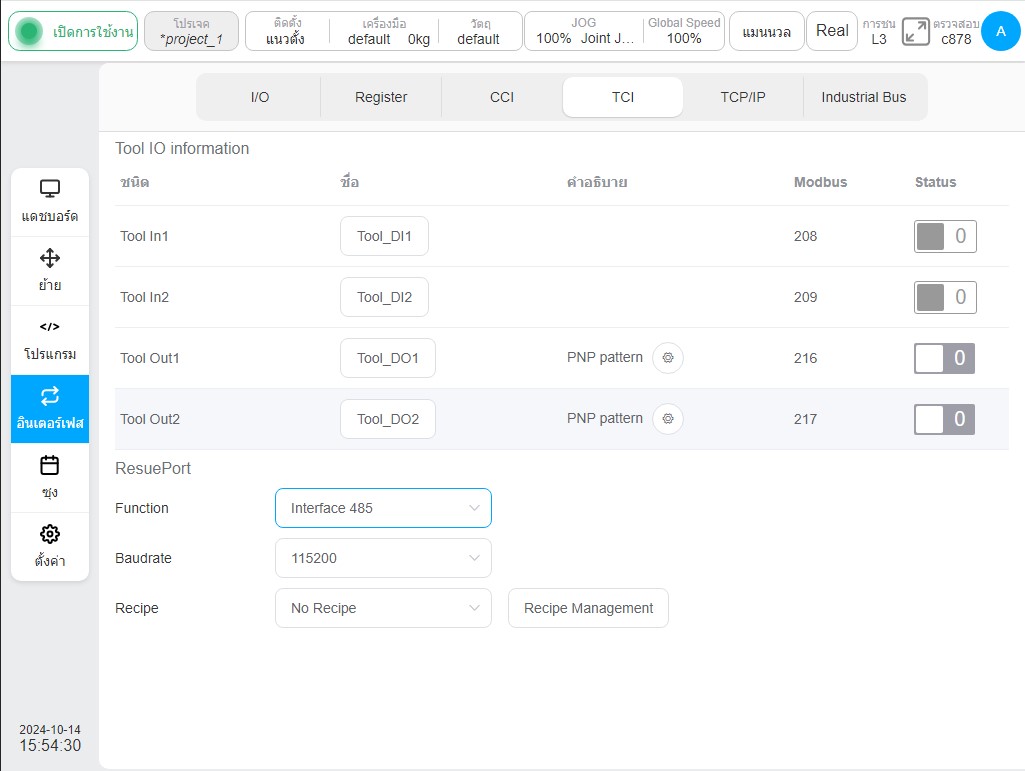
สามารถตั้งค่าบอดเรตและสูตรได้ที่อินเทอร์เฟซปลายทาง 485 การทำงานเฉพาะนั้นคล้ายกับการตั้งค่าพอร์ต 485 ของตู้ควบคุมในหน้าย่อย CCI ซึ่งไม่ได้กล่าวถึงที่นี่
TCP/IP#
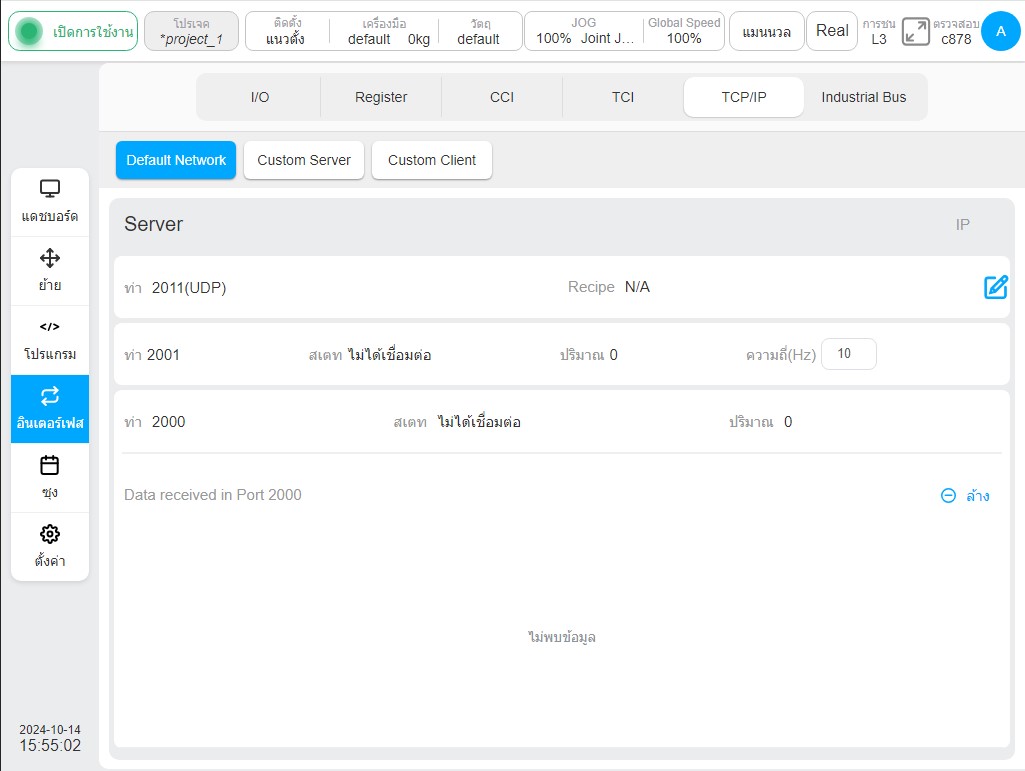
หน้าย่อย TCP/IP แสดงข้อมูลการเชื่อมต่อ TCP/IP ภายนอกของหุ่นยนต์เป็นหลัก โดยหลักๆ แล้วจะมีแท็บย่อย 3 แท็บ ได้แก่ เครือข่ายเริ่มต้น เซิร์ฟเวอร์ที่กำหนดเอง และไคลเอนต์ที่กำหนดเอง
หน้าย่อยเครือข่ายเริ่มต้นจะแสดงข้อมูลเกี่ยวกับพอร์ต 2000, 2001 และ 2011 ในฐานะเซิร์ฟเวอร์ แสดงสถานะการเชื่อมต่อและจำนวนการเชื่อมต่อสำหรับ IP ระบบ พอร์ต 2000 และ 2001
Note
ที่อยู่ IP ที่แสดงบนเซิร์ฟเวอร์จะสอดคล้องกับที่อยู่ IP ของจุดเชื่อมต่อเครือข่าย LAN1 สำหรับการตั้งค่าที่อยู่ของ LAN1 โปรดดูที่ "การตั้งค่าเครือข่าย"
พอร์ต 2000 สามารถรับคำสั่งควบคุมของหุ่นยนต์ได้ ข้อมูลที่พอร์ต 2000 ได้รับจะแสดงในส่วนล่างของหน้า
โดยค่าเริ่มต้น พอร์ต 2001 จะส่งข้อมูลสถานะปัจจุบันของหุ่นยนต์ที่ความถี่ 10Hz สามารถตั้งค่าความถี่ได้ และช่วงคือ 1hz-100hz
พอร์ต 2011 เป็นพอร์ต UDP ที่ให้คุณควบคุมหุ่นยนต์ผ่านรายการข้อมูลที่กำหนดค่าไว้ในสูตร
สำหรับรายละเอียดเกี่ยวกับวิธีใช้พอร์ต 2000 และ 2001 โปรดดูคำอธิบายของอินเทอร์เฟซการสื่อสารภายนอกสำหรับหุ่นยนต์ร่วมมือ
สำหรับรายละเอียดเกี่ยวกับวิธีใช้พอร์ต 2011 โปรดดูคำแนะนำในสูตร
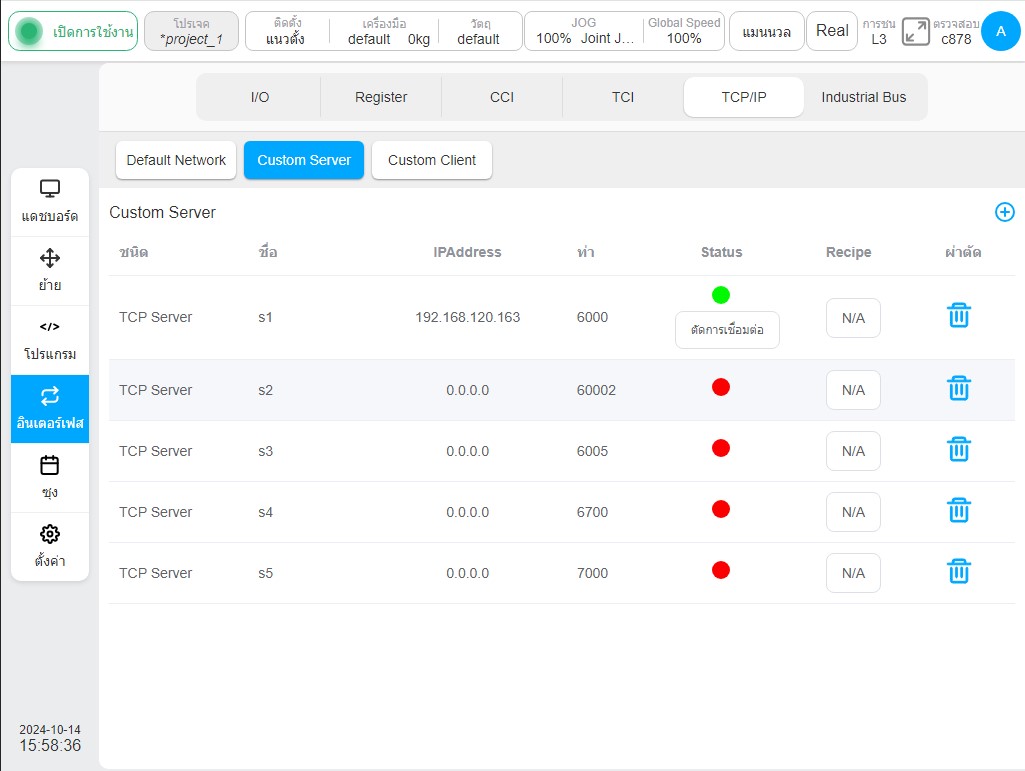
แท็บย่อยเซิร์ฟเวอร์ที่กำหนดเองจะแสดงรายการเซิร์ฟเวอร์ซ็อกเก็ตที่สร้างโดยผู้ใช้ รวมถึงประเภทเซิร์ฟเวอร์ที่กำหนดเอง ชื่อ ที่อยู่ IP ของไคลเอนต์ที่เชื่อมต่อ พอร์ต สถานะการเชื่อมต่อ สูตร และไอคอนการทำงาน
เมื่อไฟสถานะการเชื่อมต่อเป็นสีเขียว คุณสามารถคลิกปุ่ม "ตัดการเชื่อมต่อ" ทางด้านขวาของไฟสถานะเพื่อตัดการเชื่อมต่อ
คลิกปุ่มสูตรเพื่อตั้งค่าสูตร และคลิกคอลัมน์การดำเนินการ  ไอคอนเพื่อลบเซิร์ฟเวอร์ที่กำหนดเองที่เพิ่มเข้ามา
คลิกไอคอน
ไอคอนเพื่อลบเซิร์ฟเวอร์ที่กำหนดเองที่เพิ่มเข้ามา
คลิกไอคอน  ที่ด้านบนขวาของหน้า หน้าต่างป๊อปอัปจะปรากฏขึ้นเพื่อเพิ่มการเชื่อมต่อ ป้อนชื่อและหมายเลขพอร์ต และคลิกปุ่ม "ตกลง" เพื่อเพิ่มเซิร์ฟเวอร์ที่กำหนดเอง
ที่ด้านบนขวาของหน้า หน้าต่างป๊อปอัปจะปรากฏขึ้นเพื่อเพิ่มการเชื่อมต่อ ป้อนชื่อและหมายเลขพอร์ต และคลิกปุ่ม "ตกลง" เพื่อเพิ่มเซิร์ฟเวอร์ที่กำหนดเอง
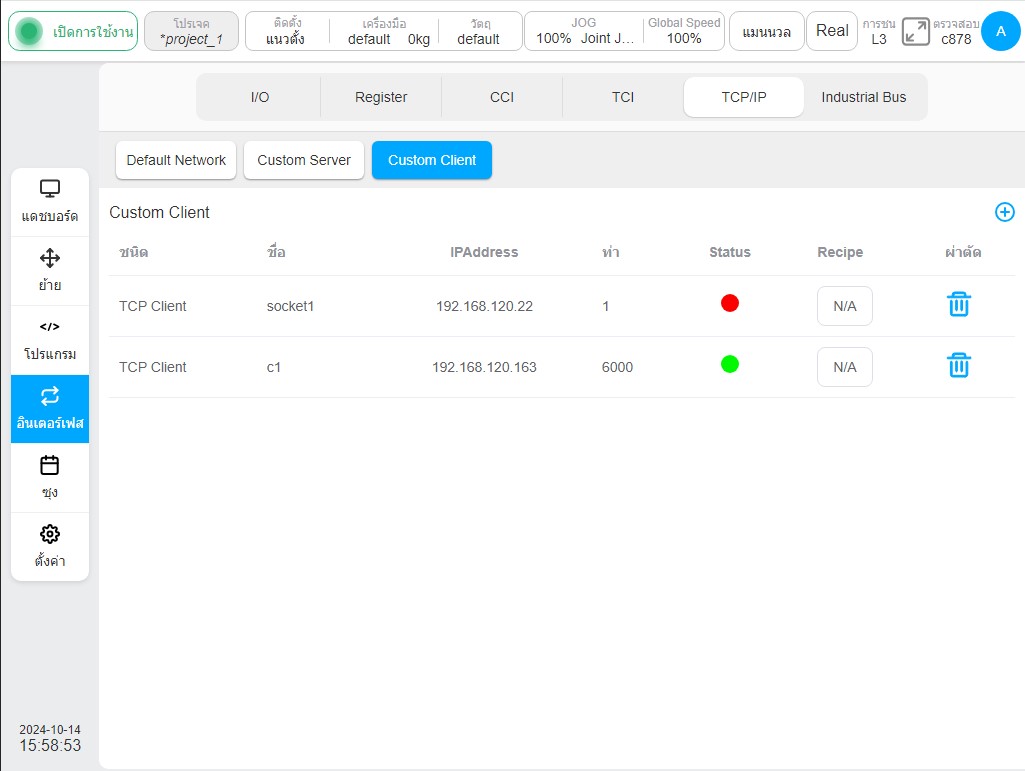
แท็บย่อยไคลเอนต์ที่กำหนดเองจะแสดงข้อมูลการเชื่อมต่อทั้งหมดของหุ่นยนต์ในฐานะไคลเอนต์ รวมถึงประเภทของไคลเอนต์ที่กำหนดเอง (TCP/UDP) ชื่อ ที่อยู่ IP พอร์ต สูตร และไอคอนการทำงาน
คลิกปุ่มสูตรเพื่อตั้งค่าสูตร และคลิกไอคอนคอลัมน์การดำเนินการ เพื่อลบไคลเอนต์ที่กำหนดเองที่เพิ่มเข้ามา
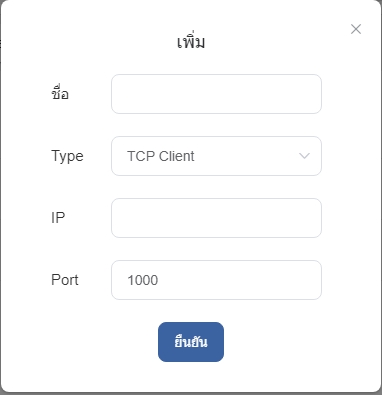
สามารถสร้างการเชื่อมต่อในโปรแกรมได้โดยใช้สคริปต์หรือคลิกไอคอน ที่ด้านบนขวาของหน้าเพื่อสร้าง
คลิกไอคอน จะปรากฏกล่องโต้ตอบต่อไปนี้ขึ้นมา ให้ป้อนข้อมูลการเชื่อมต่อและคลิกปุ่ม 'ตกลง' เพื่อสร้างการเชื่อมต่อ
บัสอุตสาหกรรม#
หน้าย่อยรถบัสอุตสาหกรรมส่วนใหญ่ประกอบด้วยสี่แท็บย่อย: Modbus TCP, Modbus RTU, Profinet, Ethernet/IP.
การใช้ฟังก์ชัน Modbus TCP ระบบหุ่นยนต์สามารถทํางานเป็นเซิร์ฟเวอร์ Modbus เพื่อฟังคําสั่งจากอุปกรณ์ไคลเอนต์ Modbus ภายนอกและตรวจสอบสถานะการเชื่อมต่อเมื่อหุ่นยนต์อยู่ในสถานะเปิดเครื่อง ค่าของการลงทะเบียนที่อยู่ Modbus เป้าหมายจะดําเนินการตามคําสั่ง r/w จากไคลเอนต์ Modbus ดังแสดงในรูปด้านล่าง ข้อมูลของการเชื่อมต่อ Modbus TCP และการทํางานที่เป็นไปได้จะปรากฏขึ้น
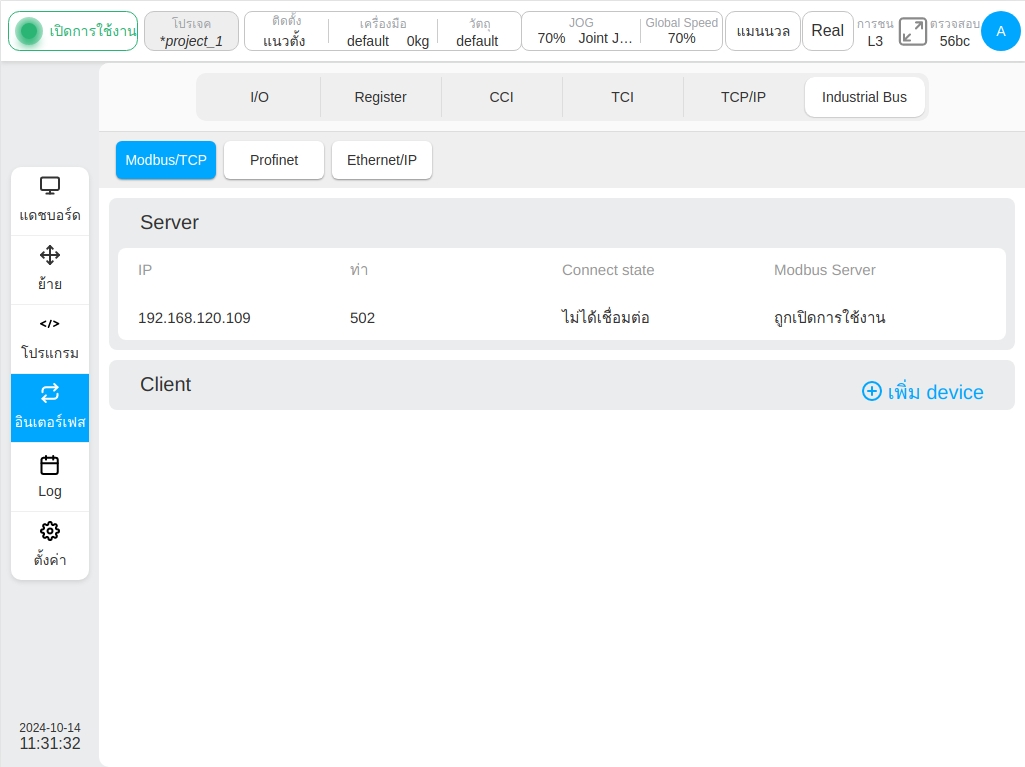
เมื่อใช้ฟังก์ชัน Modbus TCP ระบบหุ่นยนต์สามารถทํางานเป็นไคลเอนต์ Modbus เพื่อเชื่อมต่อกับอุปกรณ์เซิร์ฟเวอร์ Modbus ภายนอกภายนอก สามารถใช้งานการลงทะเบียนที่อยู่ Modbus เป้าหมายได้
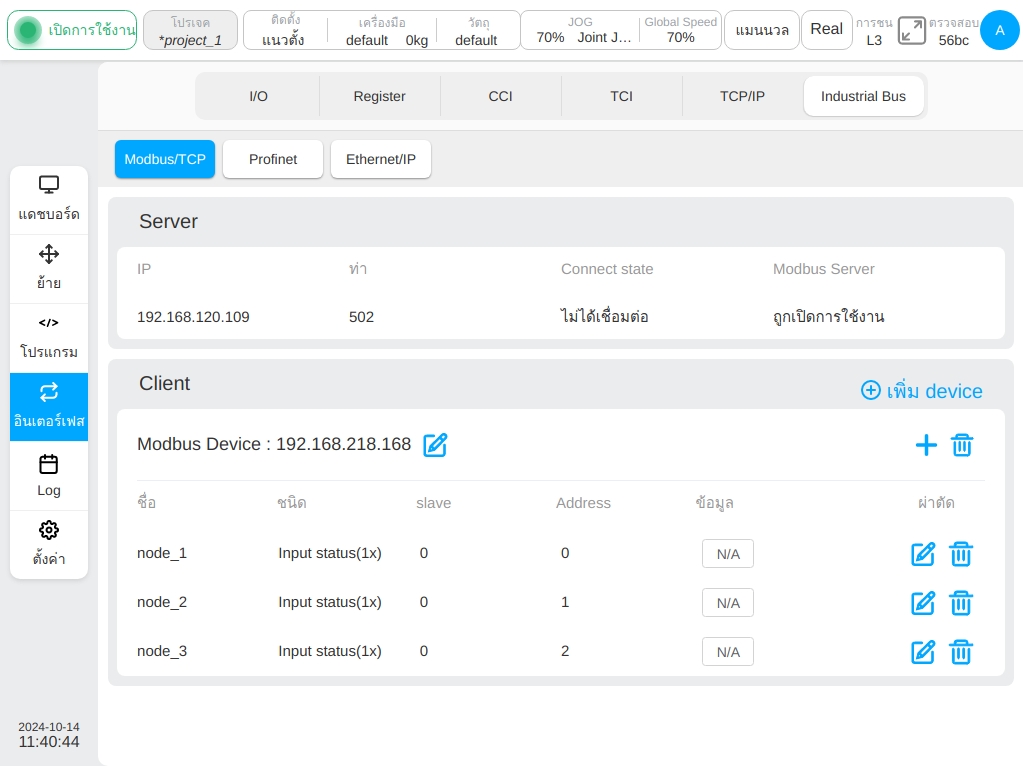
ที่อยู่ IP ของระบบ หมายเลขพอร์ต และสถานะการเชื่อมต่อของเซิร์ฟเวอร์ Modbus จะแสดงที่ส่วนบนของอินเทอร์เฟซ คลิก เพิ่มอุปกรณ์ แป้นพิมพ์เสมือนจะปรากฏขึ้น ป้อนที่อยู่ IP ของอุปกรณ์ไคลเอนต์ Modbus ภายนอก เช่น 192.168.218.163 ที่อยู่ IP ของอุปกรณ์ Modbus และไอคอนที่เกี่ยวข้องจะแสดงบนอินเทอร์เฟซ
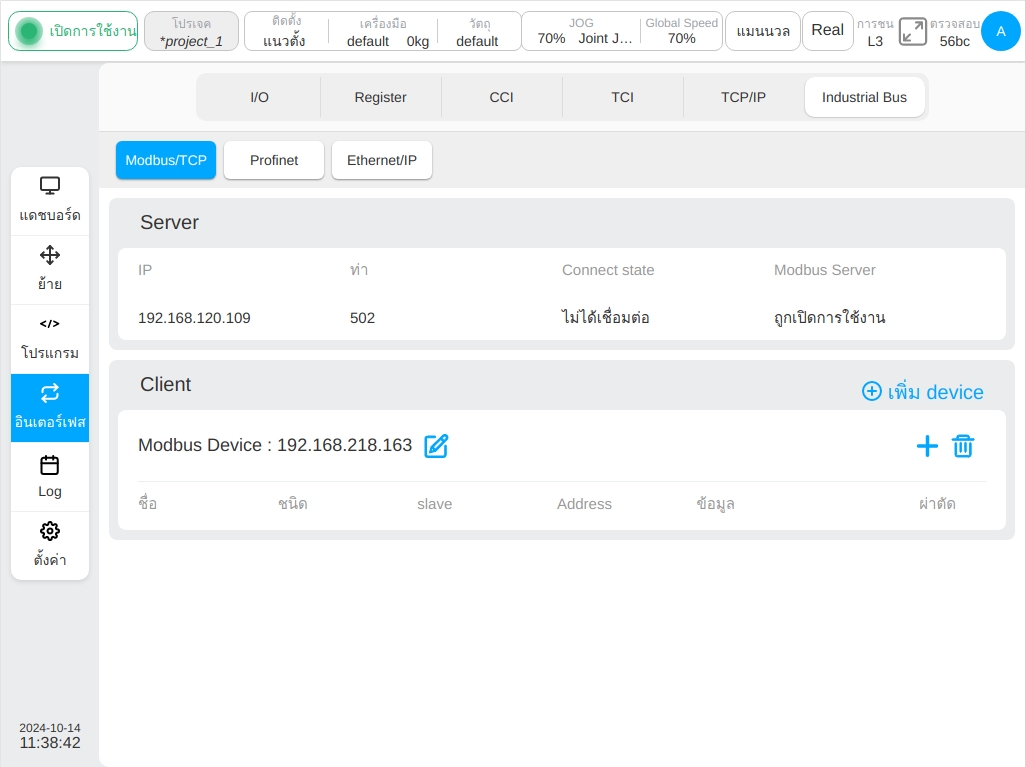
คลิกไอคอน  หน้าต่างโหนด Modbus ใหม่จะปรากฏขึ้นตามที่แสดงในรูปภาพ ป้อนชื่อโหนด ประเภทโหนด หมายเลขสเลฟ ที่อยู่ออฟเซ็ต และความยาว โดยคลิกปุ่ม 'ตกลง' เพื่อยืนยัน มีโหนดสี่ประเภท ได้แก่ คอยล์อ่านอย่างเดียว (1x) คอยล์อ่าน-เขียน (0x) รีจิสเตอร์อ่านอย่างเดียว (3x) และรีจิสเตอร์อ่าน-เขียน (4x)
หน้าต่างโหนด Modbus ใหม่จะปรากฏขึ้นตามที่แสดงในรูปภาพ ป้อนชื่อโหนด ประเภทโหนด หมายเลขสเลฟ ที่อยู่ออฟเซ็ต และความยาว โดยคลิกปุ่ม 'ตกลง' เพื่อยืนยัน มีโหนดสี่ประเภท ได้แก่ คอยล์อ่านอย่างเดียว (1x) คอยล์อ่าน-เขียน (0x) รีจิสเตอร์อ่านอย่างเดียว (3x) และรีจิสเตอร์อ่าน-เขียน (4x)
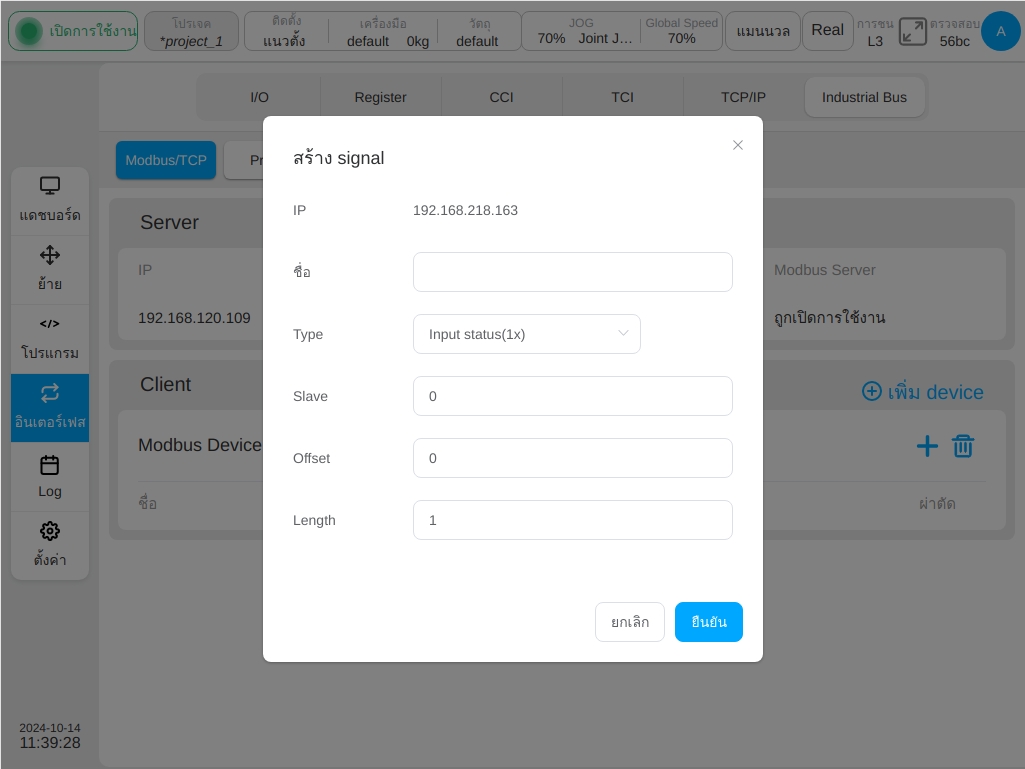
เมื่อสร้างโหนด ความยาวจะเป็น 1 ตามค่าเริ่มต้น เมื่อค่าความยาวเป็น 1 โหนดเดียวจะถูกสร้างขึ้น หากความยาวมากกว่า 1 โหนดหลายโหนดจะถูกสร้างขึ้นเป็นชุด หากกำหนดความยาวเป็น 3 ให้เพิ่มขีดล่าง (_) ลงในชื่อโหนดตามความยาว นั่นคือ โหนด_1 โหนด _2 และโหนด _3 และที่อยู่จะเป็น 0 1 และ 2 ตามลำดับ ตามที่แสดงในรูปภาพ
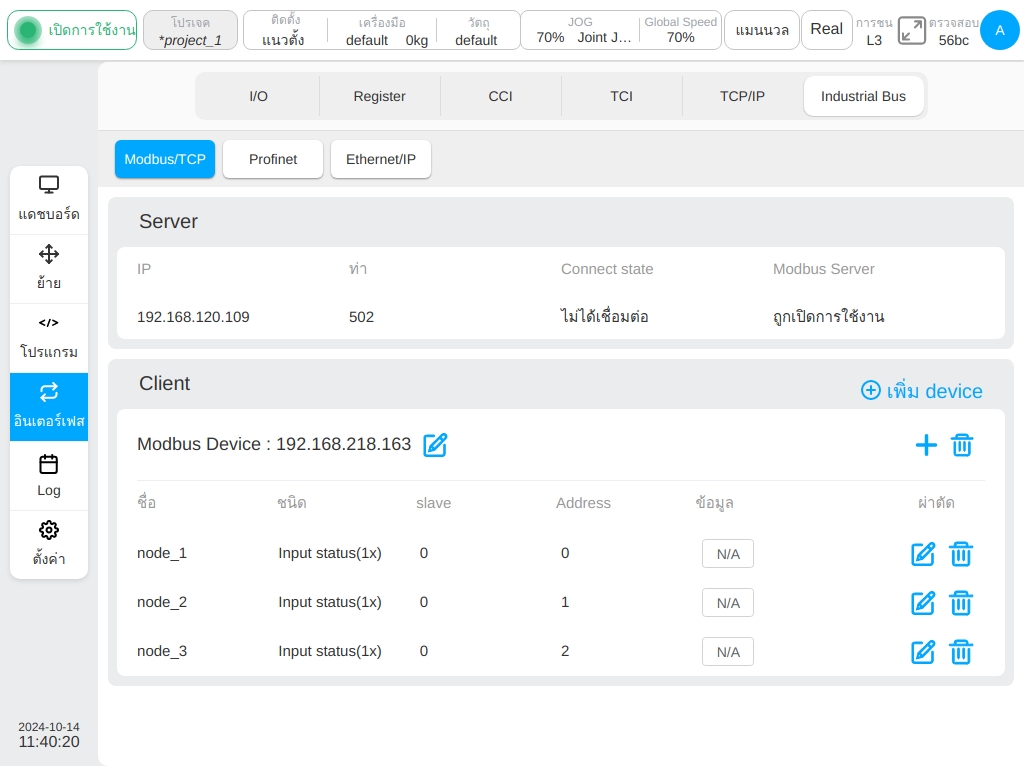
หลังจากสร้างโหนดใหม่แล้ว ข้อมูลเกี่ยวกับโหนดที่กำหนดใหม่จะแสดงบนอินเทอร์เฟซ หากไม่มีข้อมูลแสดงในคอลัมน์ข้อมูล จะแสดง N/A
ผู้ใช้สามารถแก้ไขหรือลบโหนดแต่ละโหนดได้ คลิกปุ่ม  ของแถวโหนดที่เกี่ยวข้อง และหน้าต่างป๊อปอัปจะคล้ายกับหน้าต่างป๊อปอัปเมื่อสร้างโหนดใหม่
ยกเว้นว่าไม่สามารถเปลี่ยนชื่อโหนดได้ ไม่แสดงความยาว และสามารถเปลี่ยนประเภทโหนด หมายเลขสเลฟ และที่อยู่ออฟเซ็ตได้
ของแถวโหนดที่เกี่ยวข้อง และหน้าต่างป๊อปอัปจะคล้ายกับหน้าต่างป๊อปอัปเมื่อสร้างโหนดใหม่
ยกเว้นว่าไม่สามารถเปลี่ยนชื่อโหนดได้ ไม่แสดงความยาว และสามารถเปลี่ยนประเภทโหนด หมายเลขสเลฟ และที่อยู่ออฟเซ็ตได้
ผู้ใช้สามารถเปลี่ยนที่อยู่ IP ของอุปกรณ์ Modbus ที่เพิ่งสร้างใหม่ได้ คลิกไอคอน หลังที่อยู่ IP ของอุปกรณ์ Modbus แป้นพิมพ์เสมือนทั่วไปจะปรากฏขึ้น
ป้อนที่อยู่ IP เป้าหมาย เช่น: 192.168.218.168 หลังจากคลิกปุ่ม "ตกลง" อินเทอร์เฟซจะแสดงดังต่อไปนี้
หลังจากแก้ไขที่อยู่ IP ของอุปกรณ์ Modbus แล้ว ข้อมูลโหนดของที่อยู่ IP ใหม่จะเหมือนกับข้อมูลก่อนแก้ไขที่อยู่ IP
การใช้ฟังก์ชัน Modbus RTU ระบบหุ่นยนต์สามารถทํางานเป็น Modbus Slave ผ่านอินเทอร์เฟซคอนโทรลเลอร์ 485 และอินเทอร์เฟซเครื่องมือหุ่นยนต์ 485 เมื่อหุ่นยนต์อยู่ในสถานะเปิดเครื่อง แผนก Modbus Master ภายนอกสามารถอ่านและเขียนการลงทะเบียนผ่านที่อยู่ Modbus เป้าหมาย

การใช้ฟังก์ชัน Modbus RTU ระบบหุ่นยนต์สามารถทํางานเป็น Modbus Master ผ่านอินเทอร์เฟซคอนโทรลเลอร์ 485 หรืออินเทอร์เฟซเครื่องมือหุ่นยนต์ 485 และเชื่อมต่อกับอุปกรณ์ Modbus Slave ภายนอกเมื่อหุ่นยนต์อยู่ในสถานะเปิดเครื่อง สามารถอ่านและเขียนการลงทะเบียนของ Modbus Slave ผ่านที่อยู่ Modbus การดําเนินการที่เกี่ยวข้องทั้งหมด เช่น เพิ่ม ลบ แก้ไข และอื่นๆ ในโหนด Modbus นั้นเหมือนกับฟังก์ชัน Modbus TCP อย่างสมบูรณ์
Note
หลังจากกําหนดค่าและเปิดใช้งานอินเทอร์เฟซคอนโทรลเลอร์ 485 หรืออินเทอร์เฟซเครื่องมือหุ่นยนต์ 485 แล้วจะไม่สามารถใช้งานอินเทอร์เฟซ 485 ที่ตอบสนองได้โดยตรงผ่านสคริปต์และฟังก์ชันที่เกี่ยวข้อง

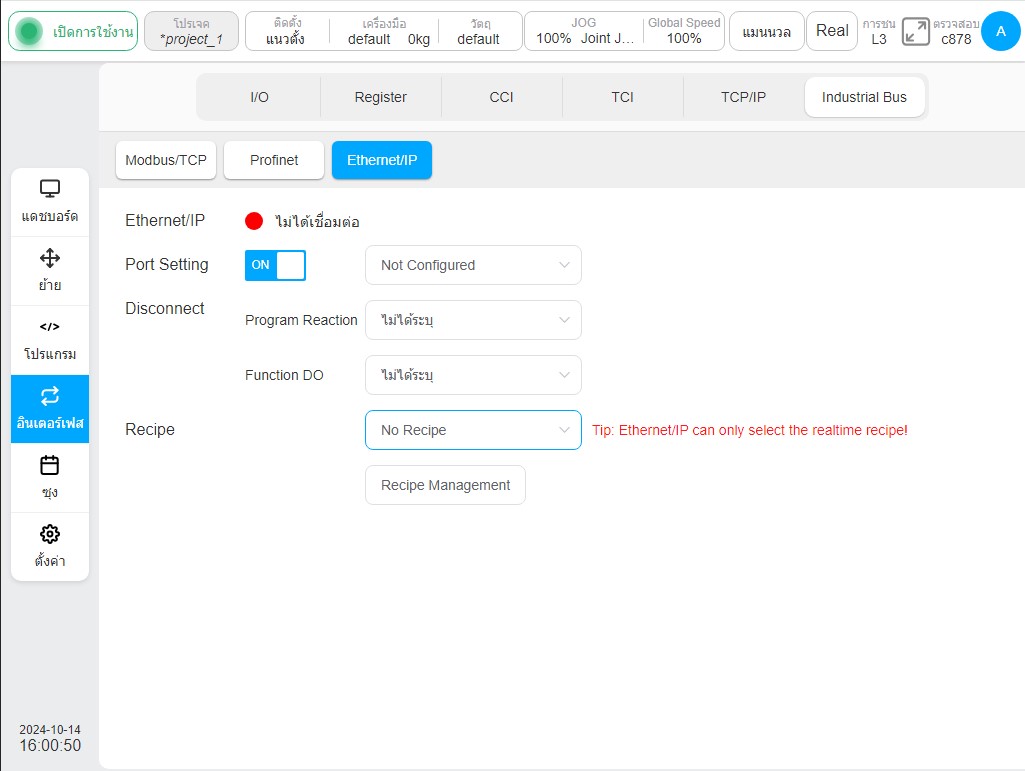
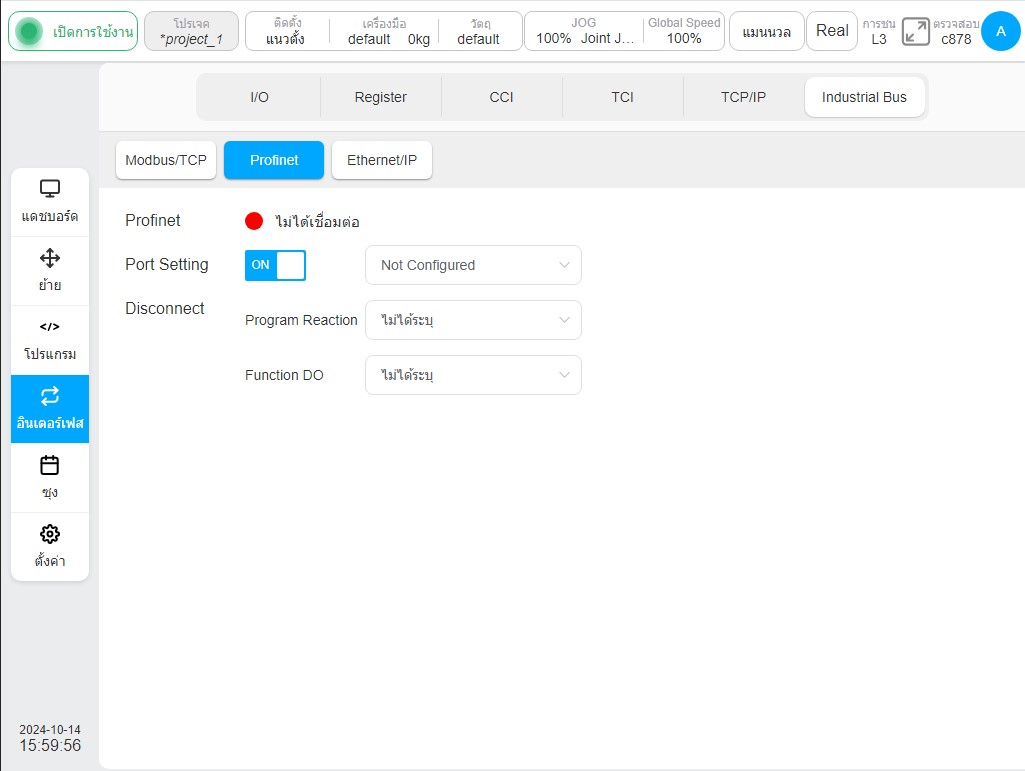
แท็บย่อย Profinet และ Ethernet/IP ส่วนใหญ่ใช้เพื่อแสดงสถานะการเชื่อมต่อ การตั้งค่าพอร์ต และการกำหนดค่าการประมวลผลการตัดการเชื่อมต่อ รวมถึงการตอบสนองของโปรแกรมและการกำหนดค่าที่สอดคล้องกันของ IO เอาต์พุตฟังก์ชัน การตั้งค่าพอร์ตรวมถึงการเปิดใช้งานและกำหนดค่าชื่อพอร์ตที่สอดคล้องกัน ตัวเลือกตัวเลือกการตอบสนองของโปรแกรม ได้แก่: ไม่ได้กำหนด โปรแกรมหยุดชั่วคราว หยุดโปรแกรม
ตัวเลือกแบบดร็อปดาวน์ตัวเลือกเอาต์พุต DO ของฟังก์ชัน ได้แก่: ชื่อสัญญาณเอาต์พุตที่ไม่ได้กำหนดและไม่ได้กำหนดในสัญญาณเอาต์พุตฟังก์ชันในหน้าย่อย I/O ฟังก์ชัน DO ที่กำหนดค่าสำหรับการตัดการเชื่อมต่อ Profinet และ Ethernet/IP บนหน้าย่อยแต่ละหน้าจะซิงโครไนซ์กับการกำหนดค่าเอาต์พุตฟังก์ชันบนหน้าย่อย I/O
นอกจากนี้ แท็บย่อย Ethernet/IP ยังสามารถใช้สําหรับการกําหนดค่าสูตรและการจัดการสูตรอาหาร และการตั้งค่าโหมดใหญ่และเล็ก
หมายเหตุ: Ethernet/IP อนุญาตให้เลือกสูตรแบบเรียลไทม์เท่านั้น!