系统概述#
工程管理#
系统支持创建多个工程并对其进行管理,工程数据包含机器人程序、工程全局变量、工程设置等信息。系统启动加载时,会根据系统设置加载当前工程数据,其他工程数据不可以在当前工程中使用。
小心
所有的工程数据,如接口页面内的设置,设置页面内的设置等,在设置完后都需要保存工程,以便在下次开机时被正确加载。
用户管理#
系统支持创建多个用户并对其进行管理,用户权限等级分为Operator、Programmer、Maintainer、Admin。具体权限说明如下:
Operator
允许选择工程、运行程序、手动jog机器人、查看机器人状态等
Programmer
Operator用户权限
编程机器人程序、工程配置
默认用户名default,初始密码123
Maintainer
Programmer用户权限
系统更新
Admin
Maintainer用户权限
用户管理
单一用户名admin,初始密码123
用户页面概览#
如图所示,界面整体主要分三部分区域,顶部状态栏,左侧导航栏,右侧内容区,其中内容区是根据选择左侧导航栏的不同而呈现不同内容(子页面)。导航栏下方是插件入口及系统日期和时间。
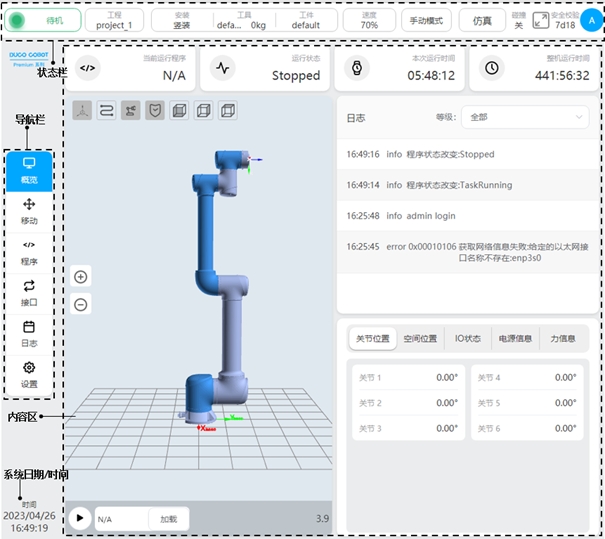
状态栏里主要展示信息有:机器人状态指示灯、当前工程、机器人安装方向、当前工具坐标系和工件坐标系相关信息、速度百分比、操作模式、碰撞检测设置信息、安全校验码、用户信息。
导航栏包含概览、移动、程序、接口、日志和设置6个图标导航,单击导航栏图标会对应切换内容区里显示的内容,各页面主要内容如下:
概览页面是生产视图页面,可以选择要运行的程序,显示程序状态、系统运行时间、系统日志以及机器人系统基本信息。
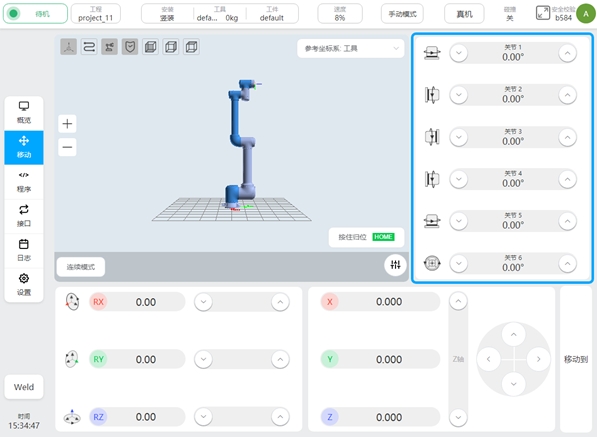
移动界面允许用户手动操作机器人,设置手动移动的坐标系及运动方式。
程序界面是机器人的主要编程页面,用户可以管理工程中的程序文件,以及通过提供的图形化编程环境编写机器人任务。
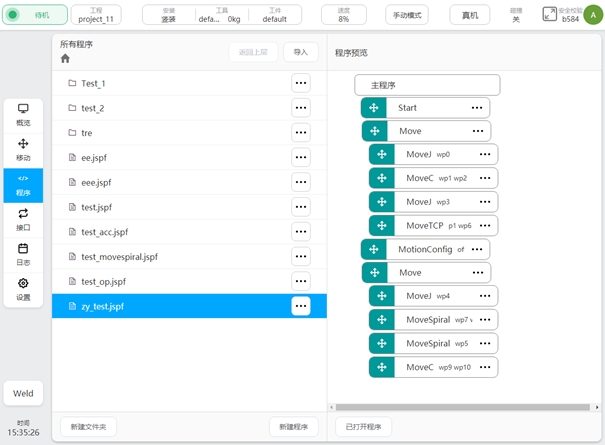
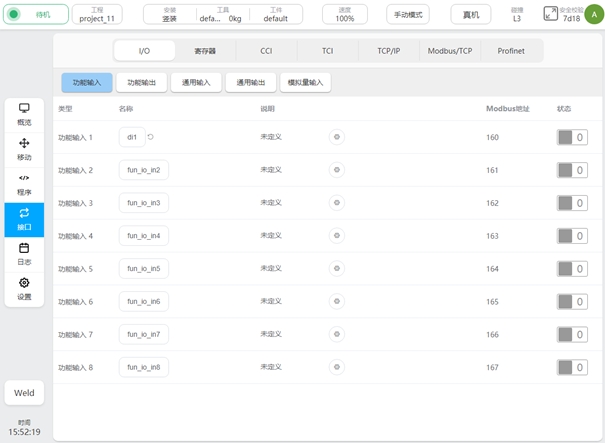
接口界面允许用户在此页面下配置机器人所有对外的交互接口,包括数字输入输出、模拟输入输出、TCP/IP接口,以及其他工业现场总线接口。
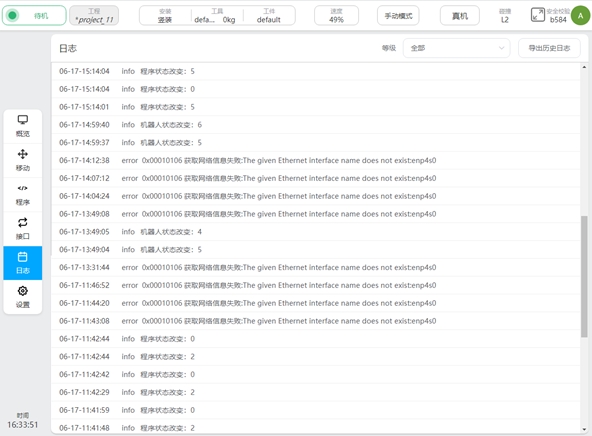
日志界面显示本次开机系统的日志信息。
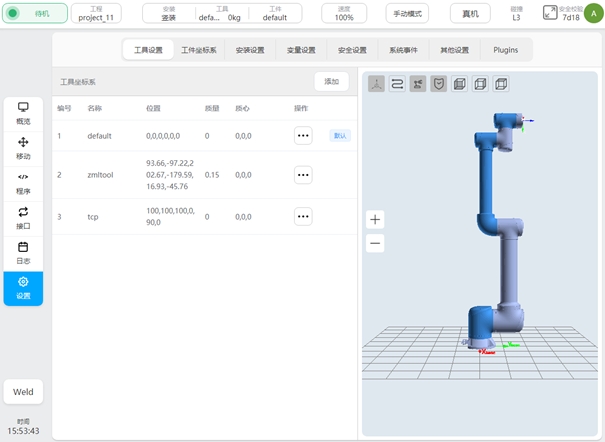
设置界面,当前工程配置设置,包含坐标系统的设置,安装方向的设置,以及安全设置等。
多终端连接#
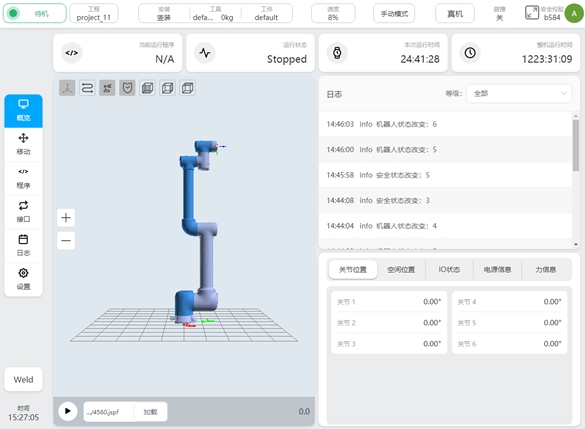
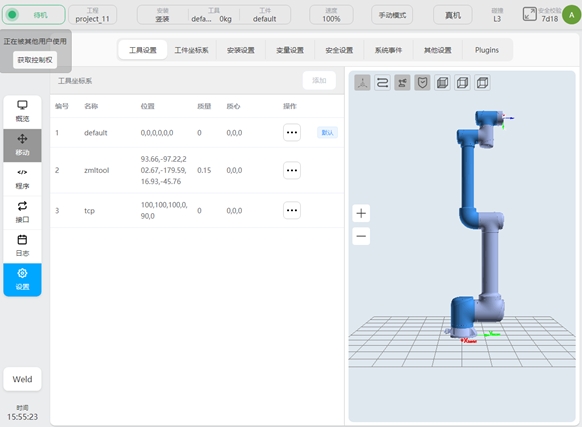
系统支持多台终端同时连接,但是只有一台终端拥有控制权,可以进行程序的运行、系统的配置等全部功能。其他终端只有查看的权限,不能运行机械臂及修改设置信息等。无控制权的终端显示如图:
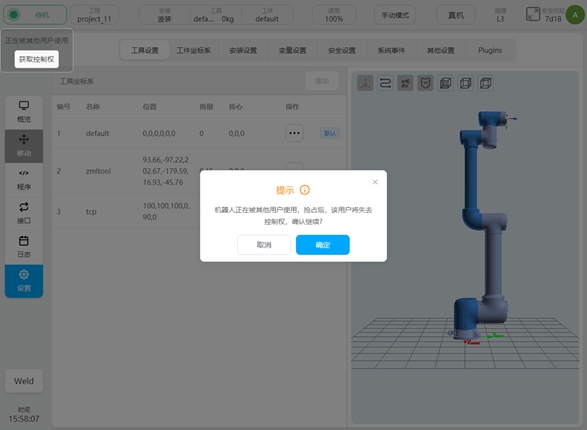
当其他终端要获取控制权时,可以点击左上角的“获取控制权”按钮。弹出如下对话框,点击“确定”按钮获取系统的控制权,此时原来有控制权的终端将失去控制权。
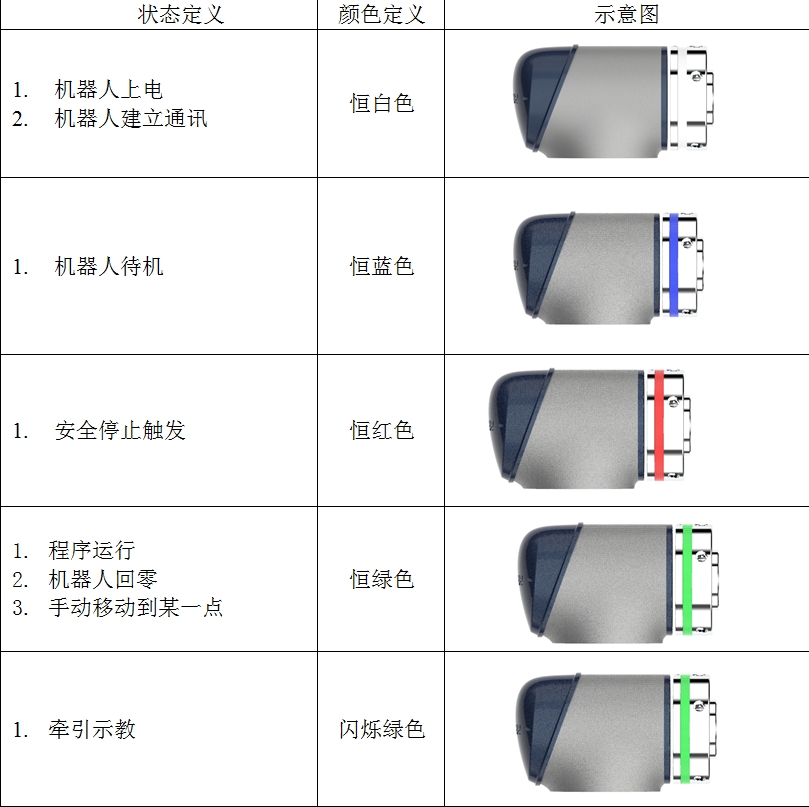
末端灯带指示#