


移动页面#
单击导航栏中“移动”会进入移动页面,如图所示。
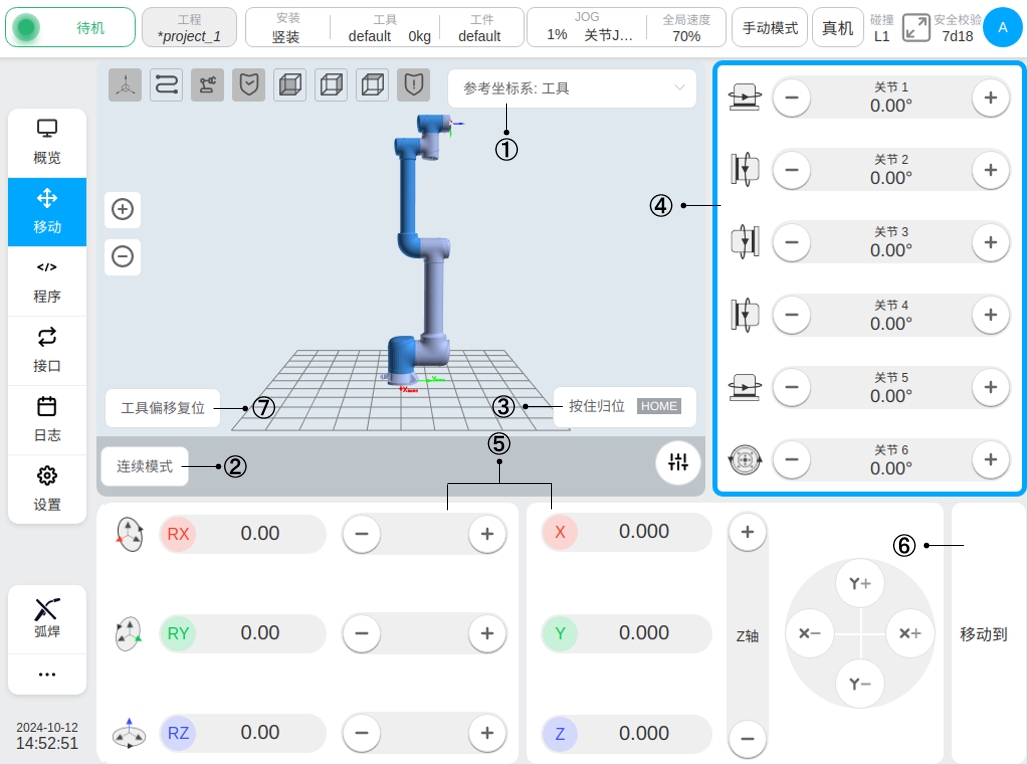
页面左上方显示3D仿真模型,单击图标①选择器,可选择当前机器人使用的坐标系和手动操作机器人的参考坐标系,默认会使用世界坐标系(此系统中同基座坐标系),表示以机器人底座为坐标基点。还可选择工具坐标系和工件坐标系,工具坐标系表示以末端工具的末端点为坐标基点,工件坐标系由用户自由设定。切换参考坐标系后,界面上显示的机器人笛卡尔坐标下的位置姿态数据会相应改变。
图标②是用户可进行模式切换的按钮,按钮显示模式即为当前选择的移动模式。单击“连续模式”按钮,可切换到“步进模式”,且界面会显示步进角度和步进距离的调节按钮和数据显示框。用户自定义移动的步进角度和步进距离默认值为0.5deg和0.5mm,最小允许设置为0.1deg和0.1mm,最大允许设置为5deg和5mm。用户可通过“-”“+”进行调节步进角度和步进距离。
图标③是“按住归位”按钮,按住该按钮机器人会移动到设定的HOME点,松开按钮会停止移动。默认HOME点是每个关节角度值均为0°,机器人呈直立状态。当机器人移动至“按住归位”按钮里“HOME”字样背景显示为绿色,说明机器人已达到HOME位置,如图所示。
区域④是手动操作机器人关节移动的区域,当单击该区域任意地方,区域会显示蓝色边框,代表当前手动操作机器人关节移动。按住某个关节的左边箭头或右边箭头按钮可移动该关节向正方向或反方向移动,松开按钮机器人关节会停止移动。用户也可以通过按住示教器上右侧“+”“-”按钮移动关节,按钮从上到下分别对应关节1~6。
区域⑤是手动操作机器人末端在笛卡尔坐标系下移动的区域,同样当单击该区域任意地方,区域会显示蓝色边框,代表当前手动操作机器人末端移动。按住X、Y、Z轴方向按钮改变机器人在笛卡尔坐标系下位置,按住RX、RY、RZ方向按钮改变机器人在笛卡尔坐标系下的姿态,松开对应按钮机器人会停止移动。同样,用户可通过按住示教器上右侧“+”“-”按钮改变机器人的位置姿态,按钮从上到下分别对应X、Y、Z、RX、RY、RZ六个移动方向。
小心
当使用示教器上的物理按钮Jog机器人时,务必根据当前激活的状态(蓝色边框),确认控制的是关节空间运动还是笛卡尔空间运动。
图标⑥是用户进行手动输入关节角度或位姿值和按住按钮操作机器人移动两种方式的切换按钮,单击“移动到”按钮,区域④和区域⑤会分别显示输入关节角度和位姿值的输入框,且3D模型区会显示一个目标点位置的灰透机器人模型。如图所示:
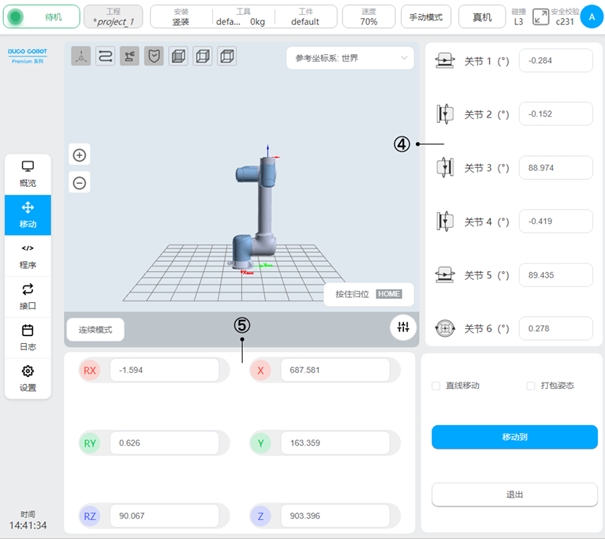
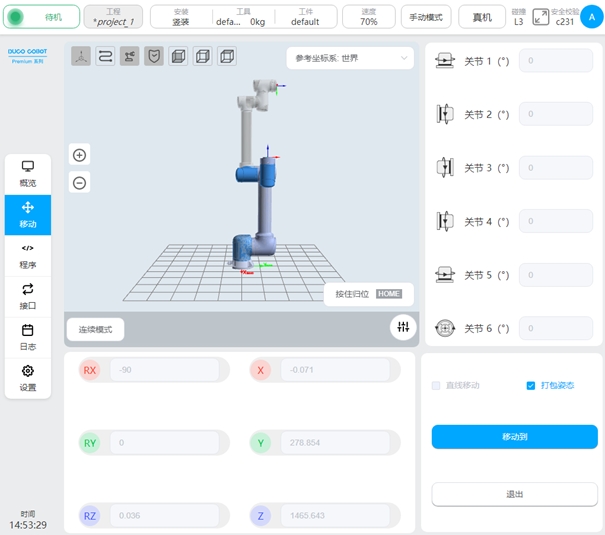
单击关节角度和位姿值的输入框,弹出虚拟数字键盘,在虚拟数字键盘中输入目标位置数据后,点击“Esc”键关闭虚拟数字键盘。然后,按住“移动到”按钮,机器人会移动到目标位置,松开该按钮机器人会停止移动。当勾选“直线移动”单选框,表示机器人是以直线移动到目标位置;否则,表示机器人以关节移动到目标位置。当勾选“打包姿态”单选框时,“直线移动”单选框会被禁用勾选,关节角度和笛卡尔位置姿态输入框分别被禁用输入,对于已勾选的“直线移动”单选框会被取消勾选,关节角度和位置姿态值会显示打包姿态时固定值,表示机器人会以关节移动到打包位置,单击“退出”按钮,会退出手动输入目标位置的界面,回到原来的移动界面。如图所示:
图标⑦是“工具偏移复位”按钮,只有当选择移动页面参考坐标系为工具坐标系时,才会显示该按钮。用户单击该按钮时,会以单击时刻的位置为参考起始点,在操作机器人运动时会在区域⑤实时显示机器人位置参考单击该按钮时的参考起始点的偏移量。直到用户再次单击“工具偏移复位”按钮才会更新TCP偏移量的计算参考起始点。