


安全维护#
手动松抱闸#
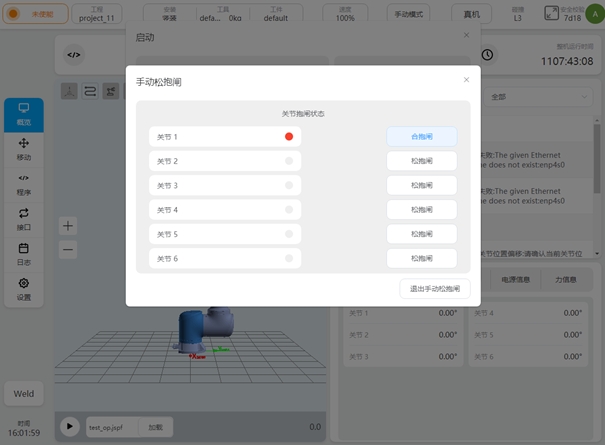
在某些情况下,用户需要手动松开单个关节的抱闸。在机械臂上电未使能的情况下,启动页面会出现手动松抱闸的入口,如图

点击可进入手动松抱闸页面,如图。该页面左侧显示各个关节的抱闸状态,灰色表示抱闸闭合,红色表示抱闸松开;右侧为抱闸控制按钮,点击可控制抱闸的分合。
抱闸检测#
用户需要按期进行抱闸检测,防止机械臂因抱闸失效带来风险。系统会周期性的提醒用户需要进行抱闸检测,出厂默认每隔30天提醒。
当距离上次抱闸检测超过设定时间后,系统将会弹出如下对话框,提示用户需要执行抱闸检测。启动页面的抱闸检测入口将显示小红点提示用户。


在机械臂使能的情况下,启动页面会出现抱闸检测功能的入口。点击可进入抱闸检测页面,如图。该页面可显示抱闸检测周期和距离上次抱闸检测过去的天数。
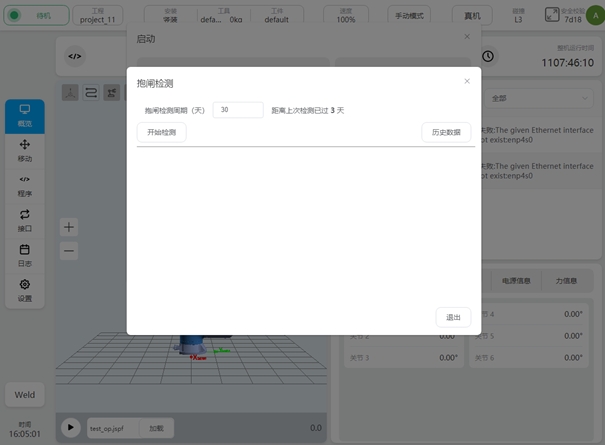
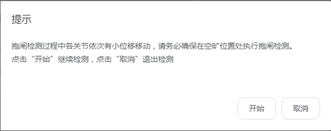
点击“开始检测”,弹出如下对话框,按照对话框提示进行操作。在检测的过程中可以暂停、停止检测过程。检测完成后,显示本次抱闸检测的结果。

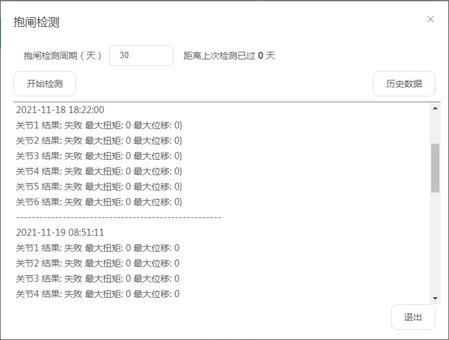
点击“历史数据”可查看历次抱闸检测的时间及检测结果。
上电关节位置检测#
机械臂在上电时,会检测关节是否在断电状态产生过异常移动,以保证使用安全。
若系统检测到至少一个机器人关节在下电状态下产生过异常移动,会弹出如下对话框。用户需要确认机器人实际位姿与界面3D模型是否一致,若一致,勾选“确认上图显示的机器人姿态与实际的一致”,点击“确认”按钮继续上电操作即可;若不一致,点击“断电”按钮断开机械臂动力电并联系维护人员。
