


状态栏#
界面头部状态栏如图所示。
机器人状态指示灯:
机器人初始未上电状态,指示灯为红色;机器人上电未使能状态,指示灯为橙色;机器人使能状态,指示灯绿色。该指示灯的颜色与启动界面中关节状态指示灯颜色定义保持一致。
状态显示区:
该区域会显示安全状态、程序状态、机器人状态三类信息。
安全状态显示字样有:缩减模式、恢复模式、安全参数配置、安全板固件升级、Stop0、Stop1、Stop2、安全板错误、机械臂固件升级;
程序状态显示字样有:程序停止中、程序执行中、程序暂停、程序暂停中、任务执行中;
机器人状态显示字样有:未上电、未使能、待机、固件更新。
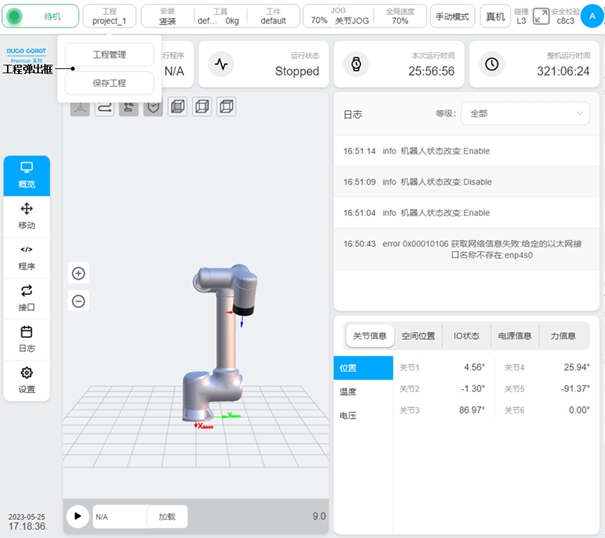
工程:
显示当前工程名。单击“工程”,会显示包含“工程管理”和“保存工程”按钮的弹出框,如图所示。其中,工程管理部分,可以进行对工程进行新建、导入、导出、恢复、保存到本地、备份到云端、删除、修改工程名等操作。
安装:
显示机器人当前安装方向以及安装位姿描述。单击“安装”显示框,显示机器人安装方向和安装位姿描述信息弹出框,如图所示。
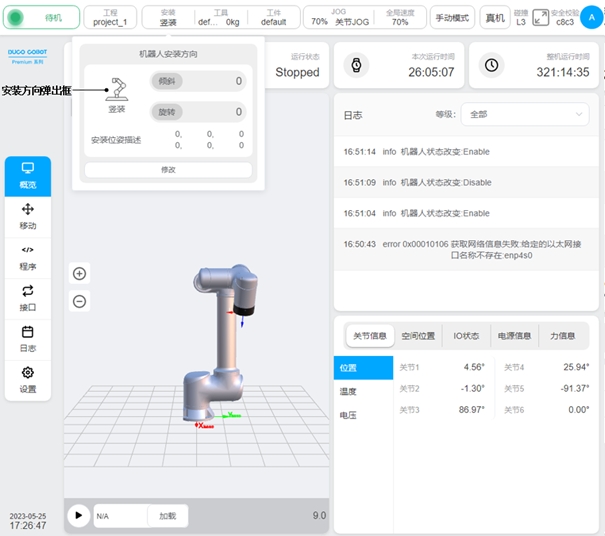
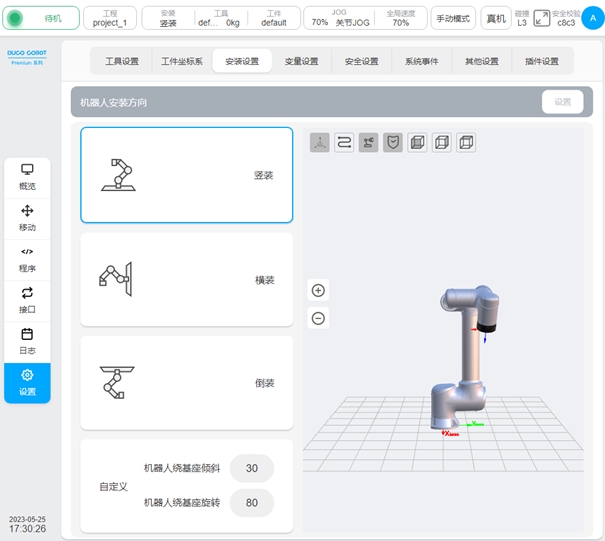
单击“修改”按钮,会跳转到设置界面里安装设置子页面,如图所示。用户可在该页面设置机器人安装方向操作。
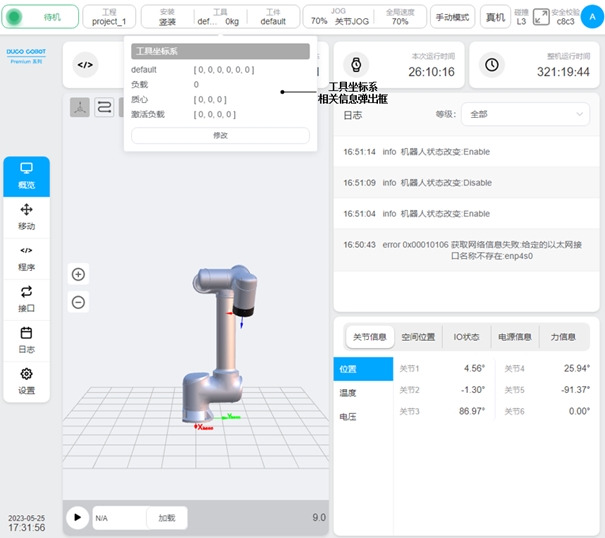
工具:
显示机器人当前工具坐标系名称和负载质量。单击“工具”显示框,显示机器人工具坐标系相关信息的弹出框,如图所示。单击“修改”按钮,会进入设置界面里工具设置子页面,与上述跳转到安装设置界面类似。
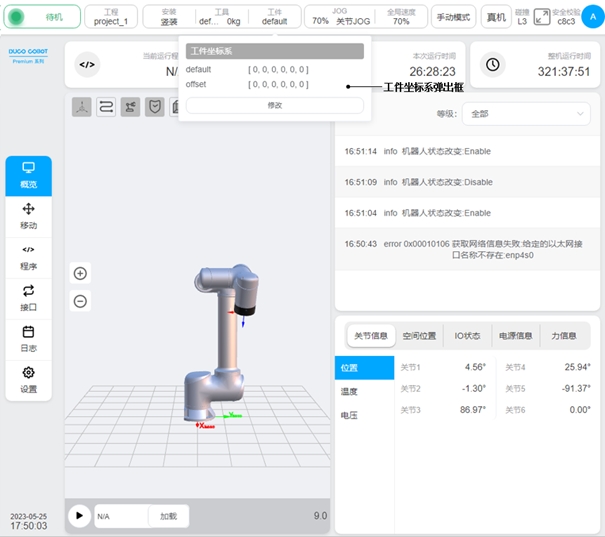
工件:
显示机器人当前工件坐标系名称。单击“工件”显示框,显示机器人工件坐标系信息的弹出框,如图所示。单击“修改”按钮,会进入设置界面里工件设置子页面,与上述跳转到安装设置界面类似。
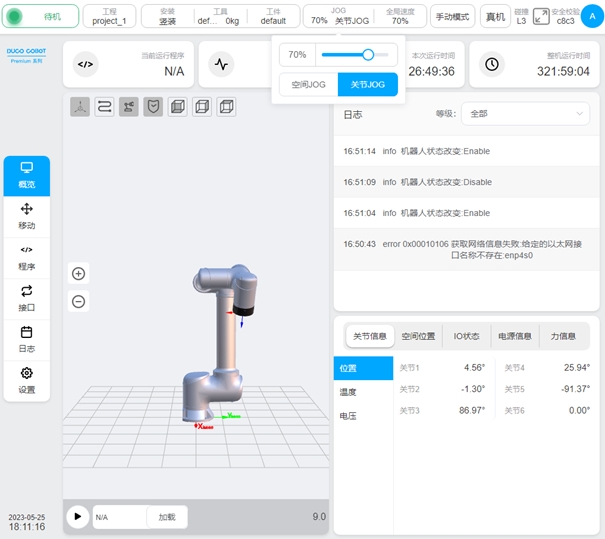
JOG速度/类型:
显示机器人当前JOG速度的百分比。单击“JOG”显示框,显示JOG速度调节滑块和JOG类型选择按钮,可以调节JOG速度或手动输入以及对空间JOG或关节JOG进行切换。注意:仅影响本次开机时的机器人JOG速度,下次开机失效,若需要更改每次开机时的JOG速度,请在“设置”——“其他设置”——“启动设置”中设置默认JOG速度。
全局速度:
显示机器人当前全局速度的百分比。单击“速度”显示框,显示速度调节滑块,可以调节全局速度或手动输入。注意:仅影响本次开机时的机器人全局速度,下次开机失效,若需要更改每次开机时的全局速度,请在“设置”——“其他设置”——“启动设置”中设置默认全局速度。
操作模式:
显示机器人操作模式,有手动模式和自动模式两种。单击该显示框,会显示包含“手动模式”和 “自动模式”按钮的弹出框,通过单击对应按钮进行操作模式的切换。当用户进行手动/自动模式切换时,用户需要输入当前登陆密码,输入正确密码后,才可以进行模式的切换。当启用物理硬件模式切换信号后,界面中的模式切换按钮无效。
真机:
切换真机和仿真模式。仿真模式只能在机器人处于使能待机且程序停止状态下设置。当机器人由于任何原因产生过断使能行为后,机器人将自动切换回真机模式。
碰撞检测:
碰撞检测显示当前的碰撞检测设置状态,以及安全等级。安全等级设置详见第6.3.2章节。

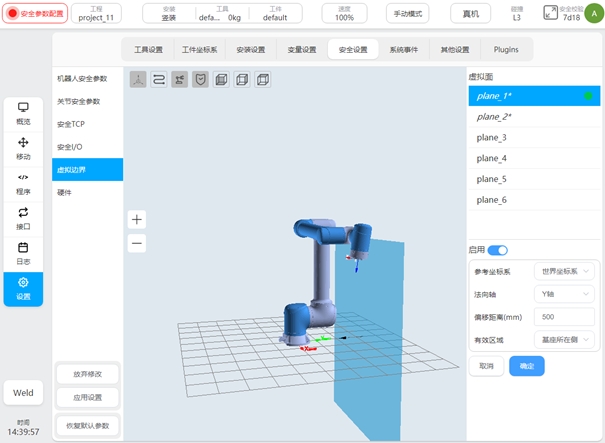
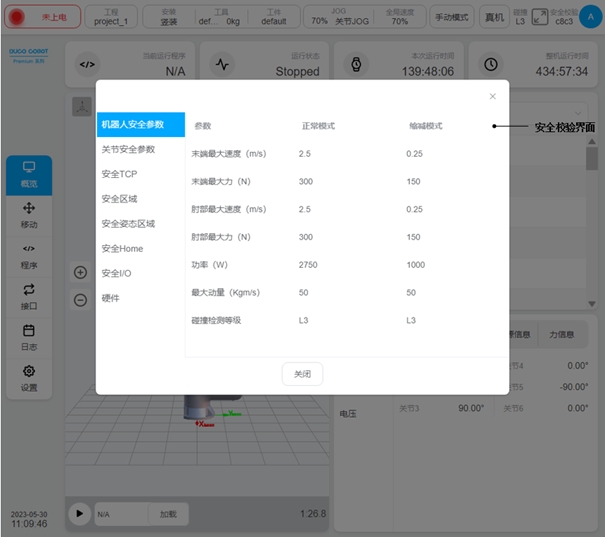
安全校验码:
显示安全校验码。单击“安全校验”区域,会弹出安全校验界面,如图所示。该界面显示的是设置界面里安全设置子页面下设置的安全配置参数。单击安全校验界面下方“关闭”按钮,或者界面右上角叉号,可以关闭页面。
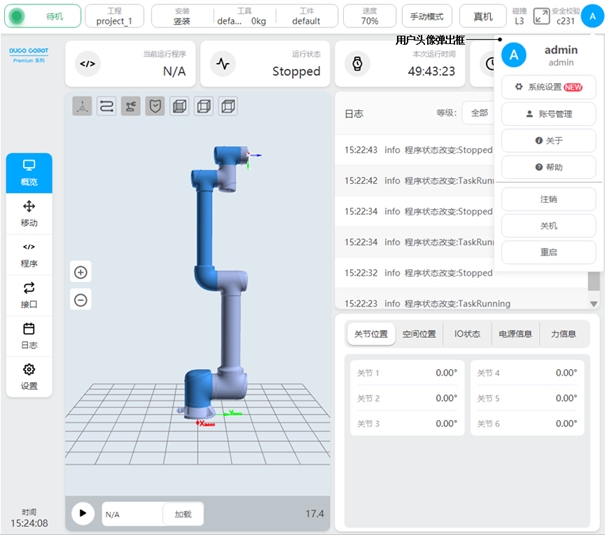
用户头像:
显示登录用户名称首字母的大写字母。单击用户头像,显示如图所示弹出框。其中,包含“更改密码”(除admin权限以外用户显示)、“系统设置”、“账号管理”(只有admin权限用户显示)、“关于”、“虚拟U盘”、“注销”、“关机”和“重启”按钮。
点击“虚拟U盘”按钮,会显示虚拟U盘弹框,如图所示。可查看当前虚拟U盘中文件夹及文件,也可以进行文件的上传、保存至本地及删除。 点击左下角”从本地上传“按钮,可将本地文件上传至该虚拟U盘,在系统更新、机器人参数导入、工程导入、程序导入等功能处选择上传至该虚拟U盘的文件。

备注
文件的上传、保存至本地的功能仅能在PC浏览器端操作,示教器上仅能查看以及进行文件的删除操作,不可上传及下载。