Настройки безопасности#
В этом разделе описано, как просматривать конфигурации безопасности и изменять конфигурации безопасности приложений. В настоящее время существует два типа контроллеров безопасности: DucoSafetyV1.0 для шкафов управления DC30. DucoSafetyV2.0 АДАПТИРУЕТСЯ к шкафам управления DC00 / DC15S/ DC30D.
DucoSafety V1.0#
Просмотр конфигураций безопасности#
Нажмите кнопку «Проверка безопасности» в строке состояния. Отобразится следующее диалоговое окно для просмотра активированных в данный момент параметров конфигурации безопасности.
Пользователь также может просмотреть параметры конфигурации безопасности на странице настройки безопасности.
Заявка на изменение конфигурации безопасности#
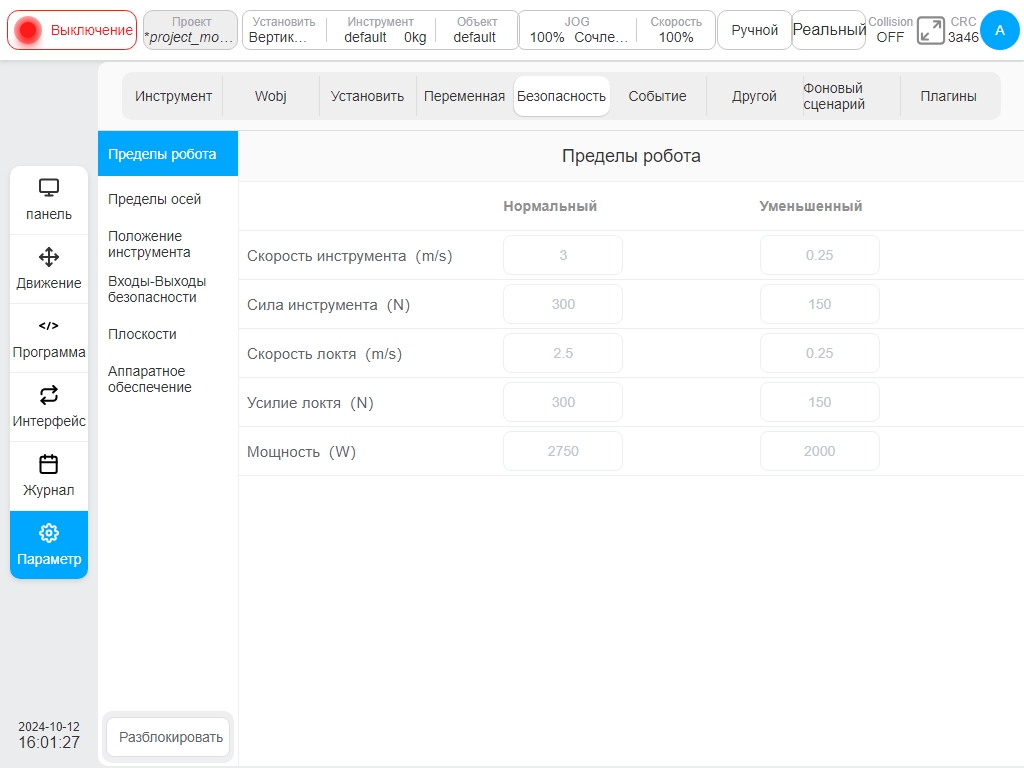
Перед изменением конфигурации безопасности необходимо использовать пароль для разблокировки учетной записи. Войдите на страницу настройки – конфигурация безопасности, нажмите кнопку «Разблокировать» в левом нижнем углу, чтобы разблокировать робота только при выключенном питании. Введя пароль (пароль входа в систему текущего пользователя), вы войдете в режим настройки параметров безопасности после прохождения проверки. В области состояния в строке состояния отображается «Настройка параметров безопасности».
При изменении конфигурации модификация будет выделена желтым цветом. Все внесенные изменения вступят в силу только после нажатия кнопки «Применить настройки». Нажав кнопку „Восстановить настройки по умолчанию“, вы восстановите все параметры безопасности до настроек по умолчанию. После нажатия кнопки «Применить настройки» появится окно запроса, как показано на рисунке.
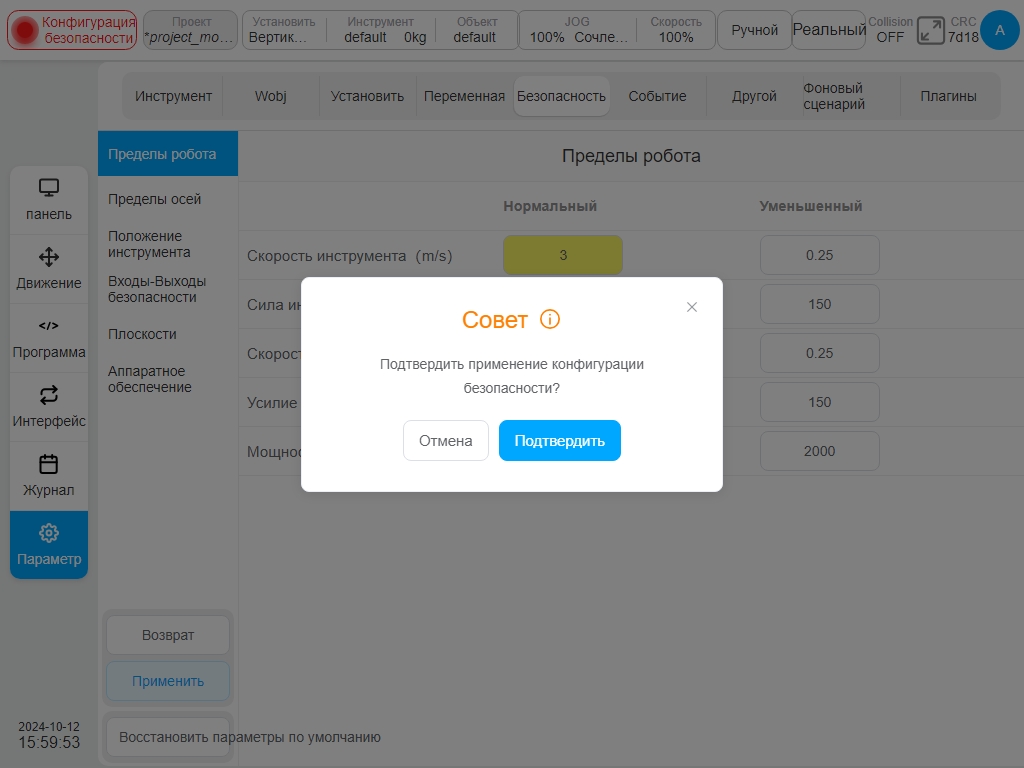
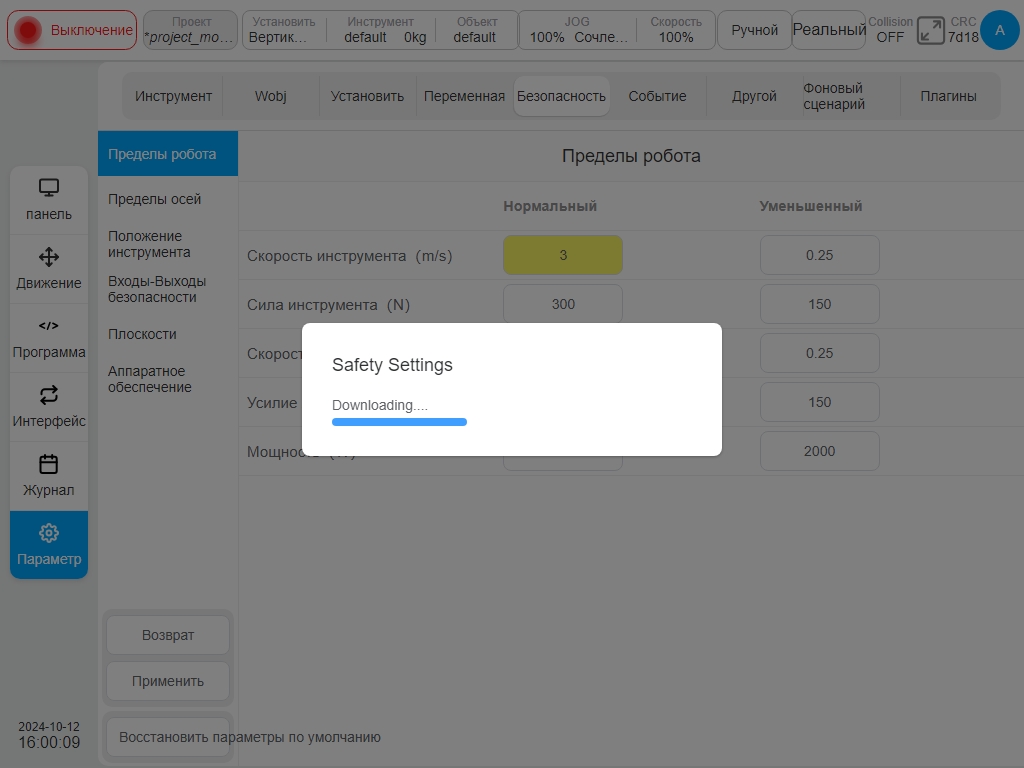
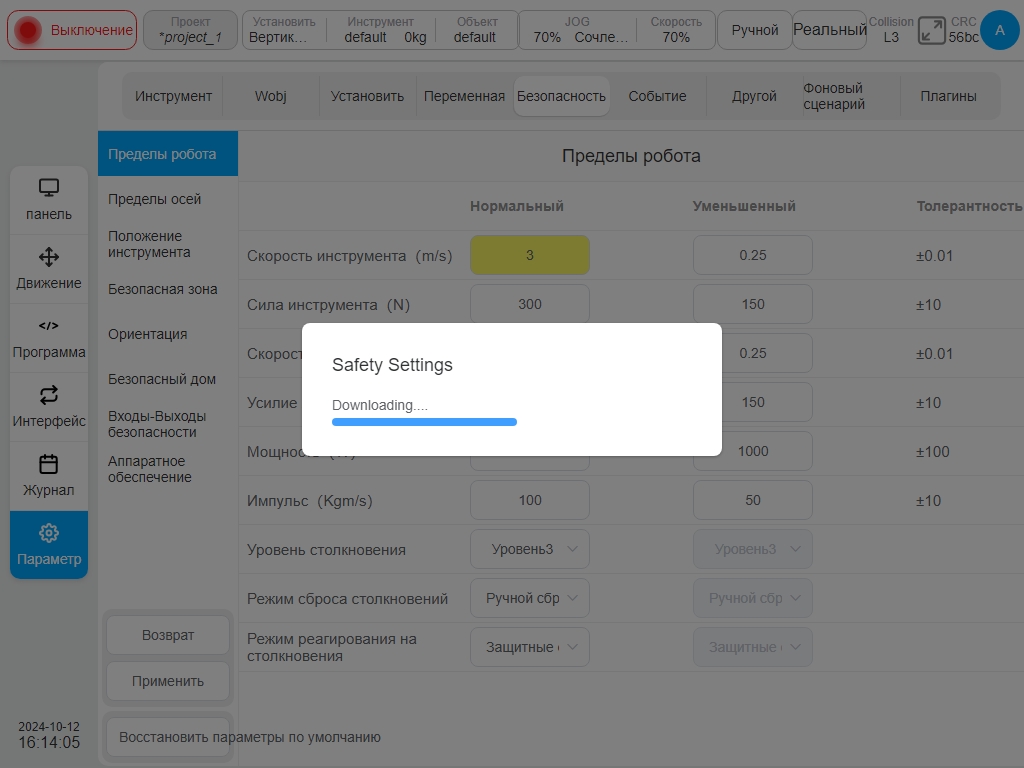
После нажатия кнопки «Подтвердить» появится окно запроса на загрузку параметров безопасности, как показано на рисунке.
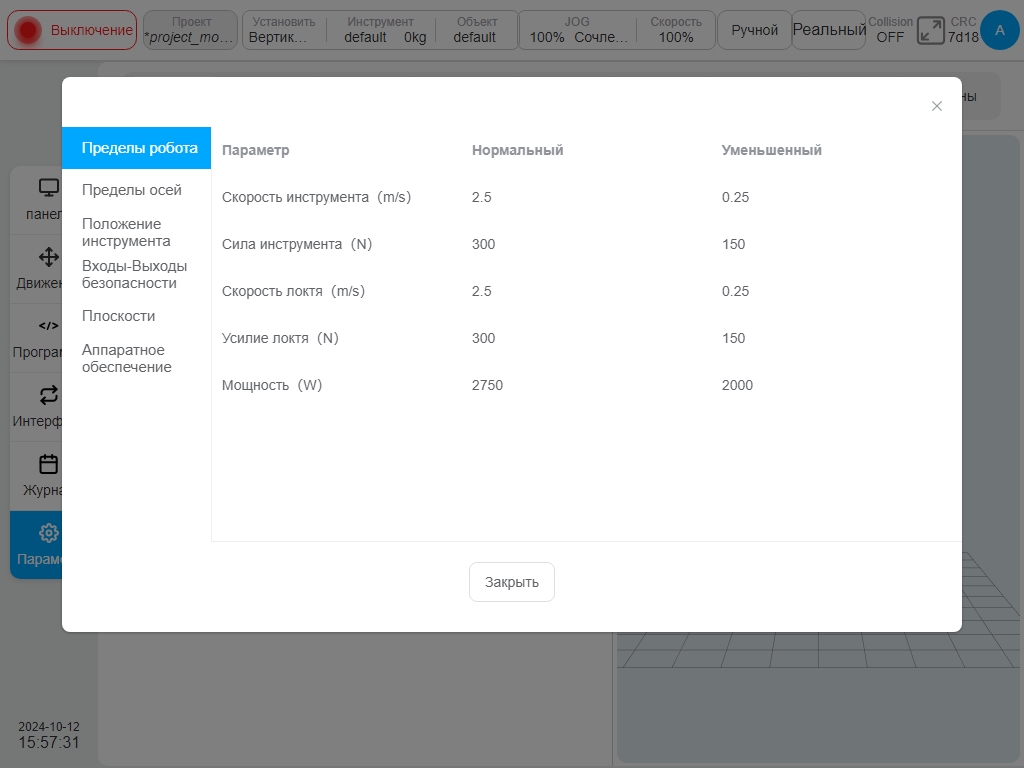
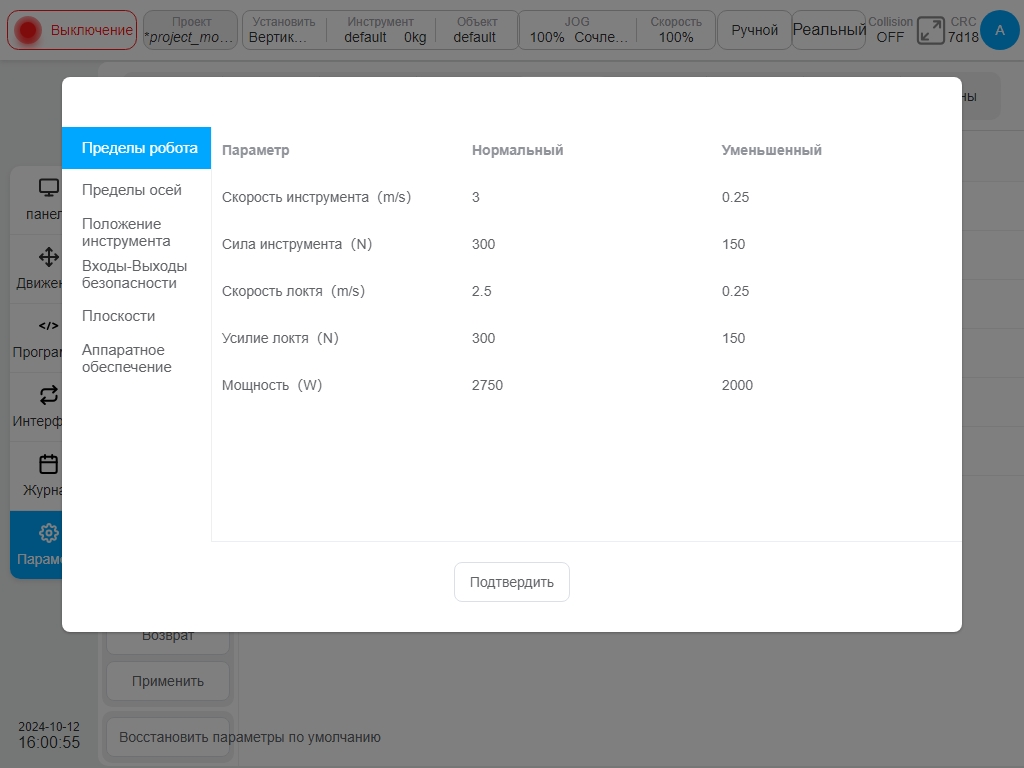
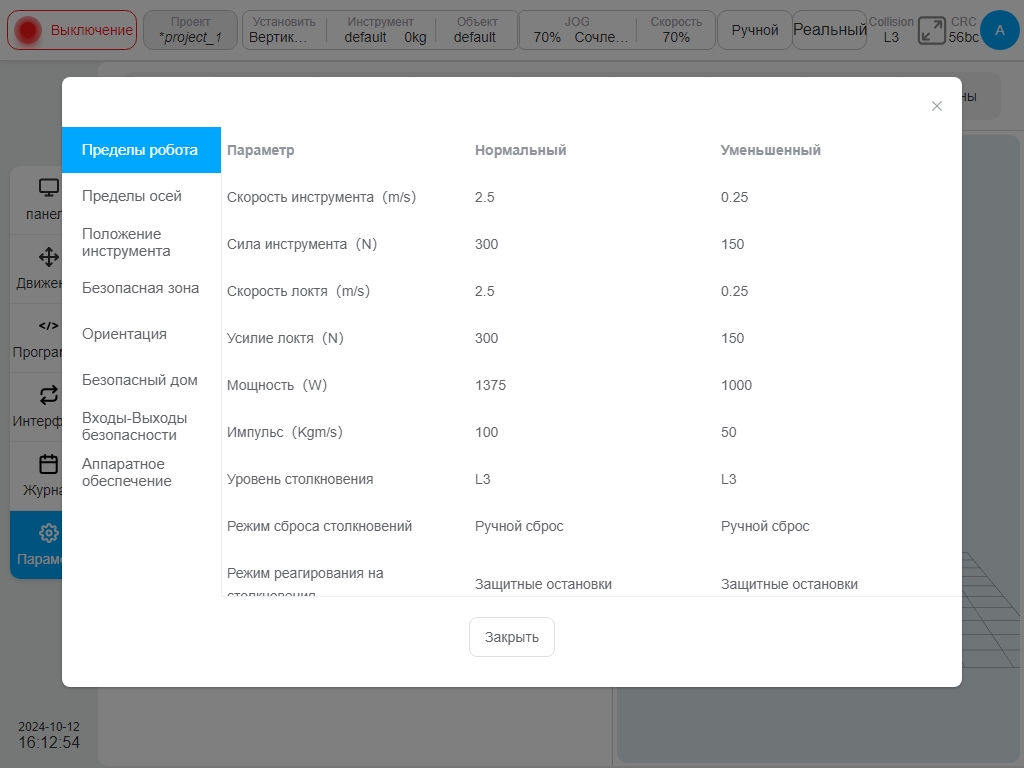
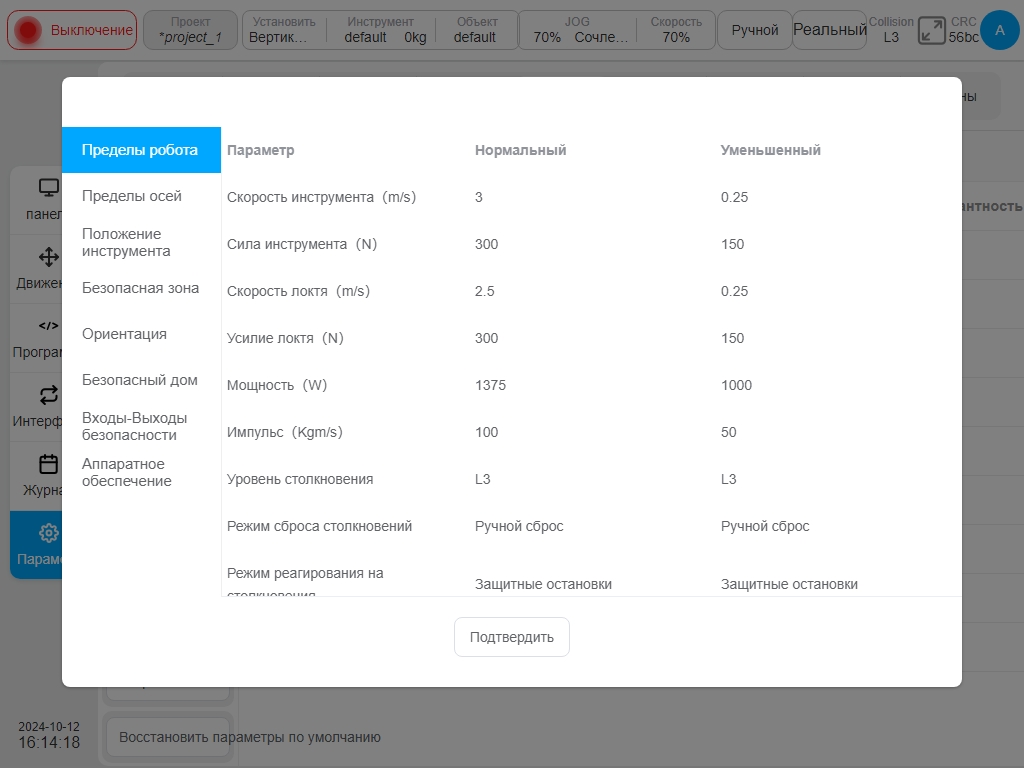
После настройки параметров безопасности система отображает настроенные параметры безопасности в диалоговом окне для проверки. Пример показан на следующем рисунке. Когда все проверено, нажмите кнопку „OK“, чтобы установить параметры безопасности. После успешного завершения конфигурации над строкой состояния изменится надпись «Проверка безопасности».
Описание параметров безопасности#
В этом разделе описываются параметры конфигурации безопасности робота.
Режим безопасности#
Нормальный режим: по умолчанию активирован режим безопасности
Режим понижения:Этот режим может быть активирован с помощью защитного входа IO
Режим восстановления:Когда фактические параметры движения робота превышают предел безопасности, что приводит к остановке робота, активируется режим восстановления, и пользователь может перемещать робота в пределах предела безопасности
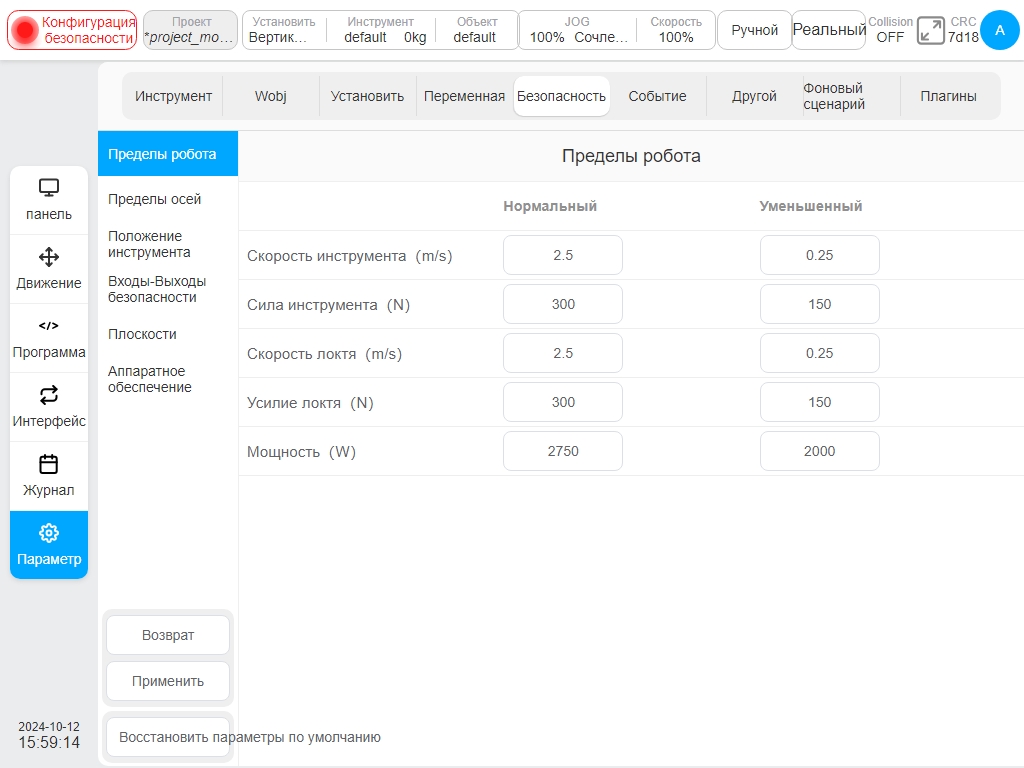
Параметры безопасности робота#
Параметры робота используются для ограничения общего движения робота. Пользователь может настроить значения параметров в нормальном и пониженном режимах.
Максимальная скорость в конце Ограничивает максимальную скорость в конце движения робота.
Максимальная сила на конце Ограничивает максимальную силу, приложенную снаружи на конце робота.
Максимальная скорость локтя Ограничивает максимальную скорость локтя робота.
Максимальное усилие на локте Ограничивает максимальную внешнюю силу, прикладываемую к локтю робота.
Мощность Ограничьте максимальное количество механической работы, выполняемой роботом, внешним воздействием.
Параметры совместной безопасности#
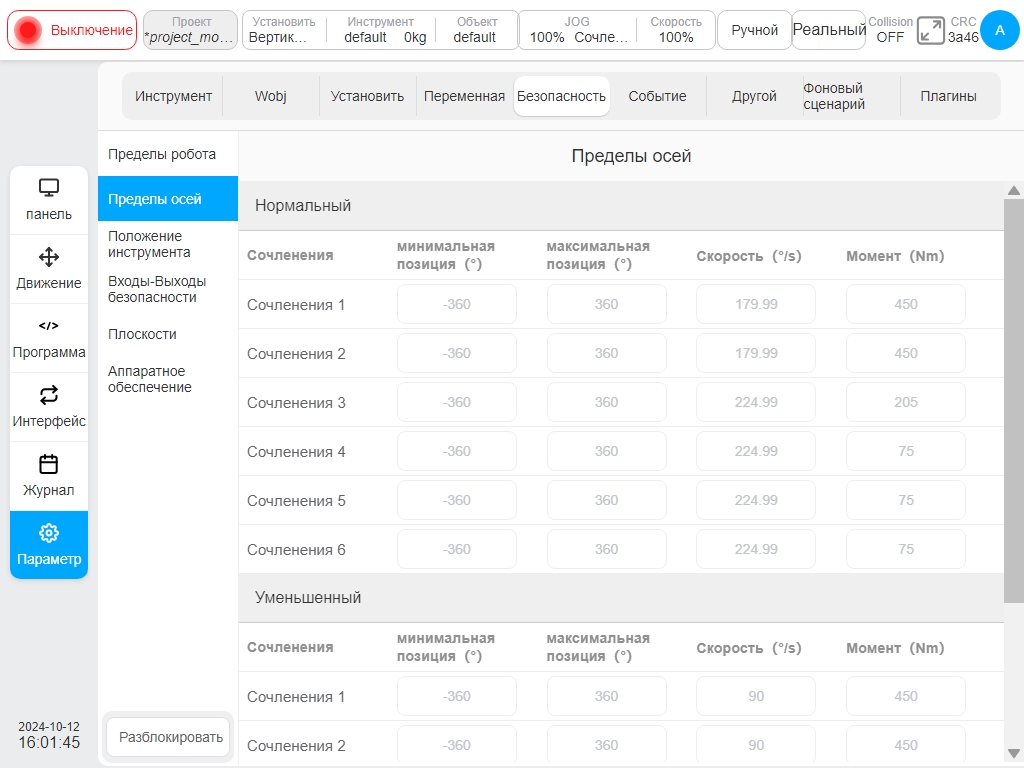
Ограничение параметров шарнира используется для ограничения диапазона положения, максимальной скорости и максимального крутящего момента каждого шарнира робота. Вы можете настроить значения его параметров в нормальном и пониженном режимах
Position Range:определяет минимальное и максимальное положение каждого сустава.
Maximum Velocity:Определяет максимальную угловую скорость каждого сустава.
Максимальный крутящий момент:Определите максимальный крутящий момент для каждого соединения
Безопасность TCP#
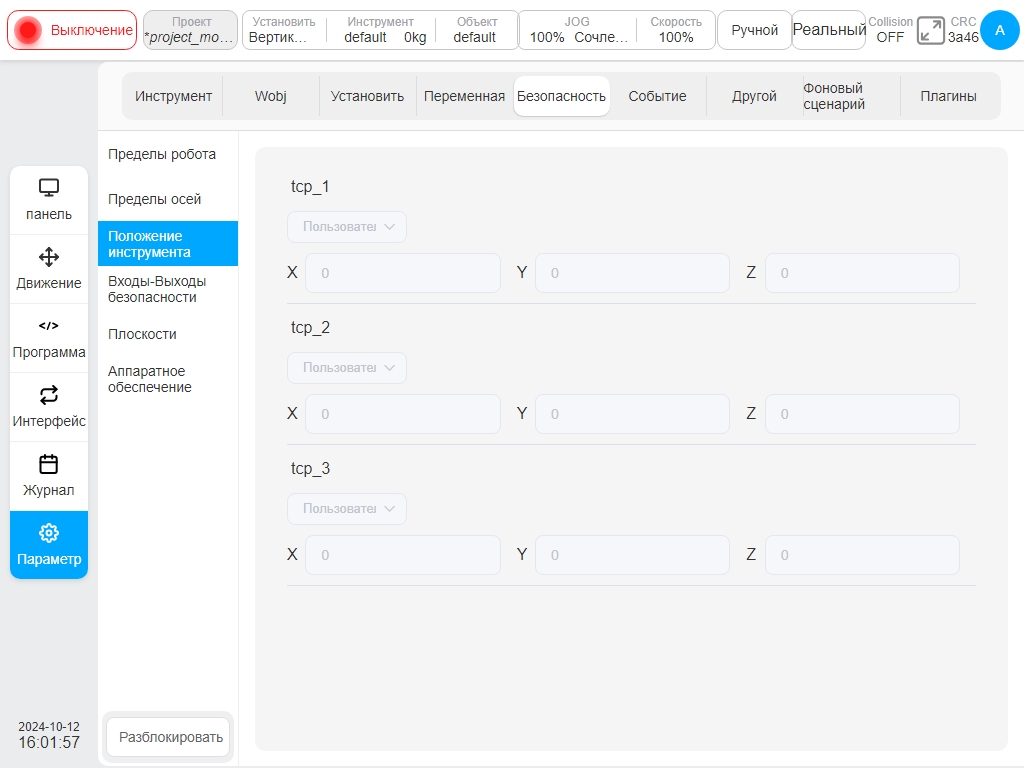
Система безопасности может определить три набора смещений TCP, при настройке которых робот будет использовать их для контроля скорости и положения. Любое положение или скорость TCP, превышающие настройки безопасности, вызовут нарушение безопасности.
Контроль скорости - это максимальная скорость инструмента среди «Параметров безопасности робота». Контроль положения также называется «Виртуальная граница». В раскрывающемся окне можно выбрать существующий TCP или напрямую настроить значение XYZ. При выборе существующего TCP и изменении значения в полях ввода X, Y и Z имя TCP в выпадающем меню станет «Custom», указывая на вновь определенный TCP.
Изменение настроек TCP не влияет на настроенные параметры безопасности.
Безопасность IO#
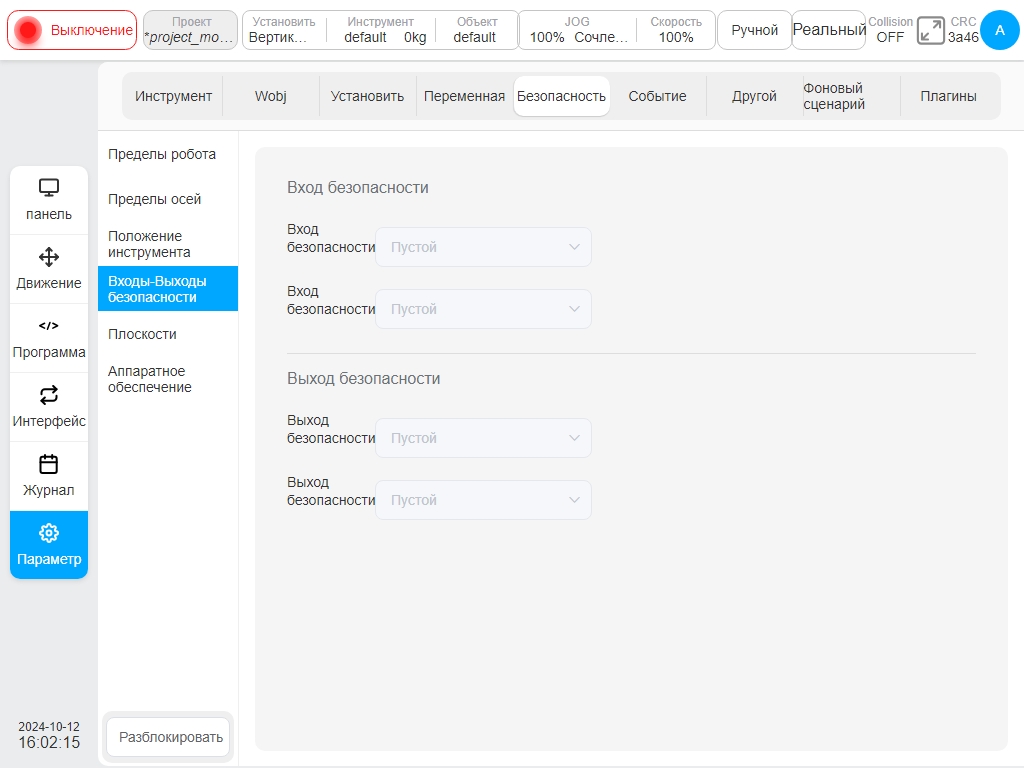
Модуль ввода/вывода безопасности содержит два конфигурируемых входных порта безопасности и два конфигурируемых выходных порта безопасности.
Безопасность включает в себя следующие функции:
Вход сброса охраны: когда происходит остановка охраны, срабатывает порт и робот возвращается в нормальное состояние
Вход защитной остановки в автоматическом режиме:После настройки, когда робот срабатывает на порт в автоматическом режиме, он выполняет защитную остановку.
Вход сброса защиты автоматического режима:Когда защита автоматического режима прекращается, порт срабатывает, и робот возвращается в нормальное состояние.
Вход уменьшенного режима:После настройки этот порт срабатывает, и робот переходит в уменьшенный режим. Робот замедлится так, чтобы пределы параметров соответствовали пределам параметров безопасности в уменьшенном режиме.
Безопасность на выходе включает в себя:
Выход охранной остановки:Этот порт срабатывает, когда робот находится в состоянии охранной остановки
Выход автоматической остановки охраны:Этот порт срабатывает, когда робот находится в автоматическом режиме остановки охраны
Выход режима уменьшения:Этот порт срабатывает, когда робот находится в режиме уменьшения.
Виртуальная граница#
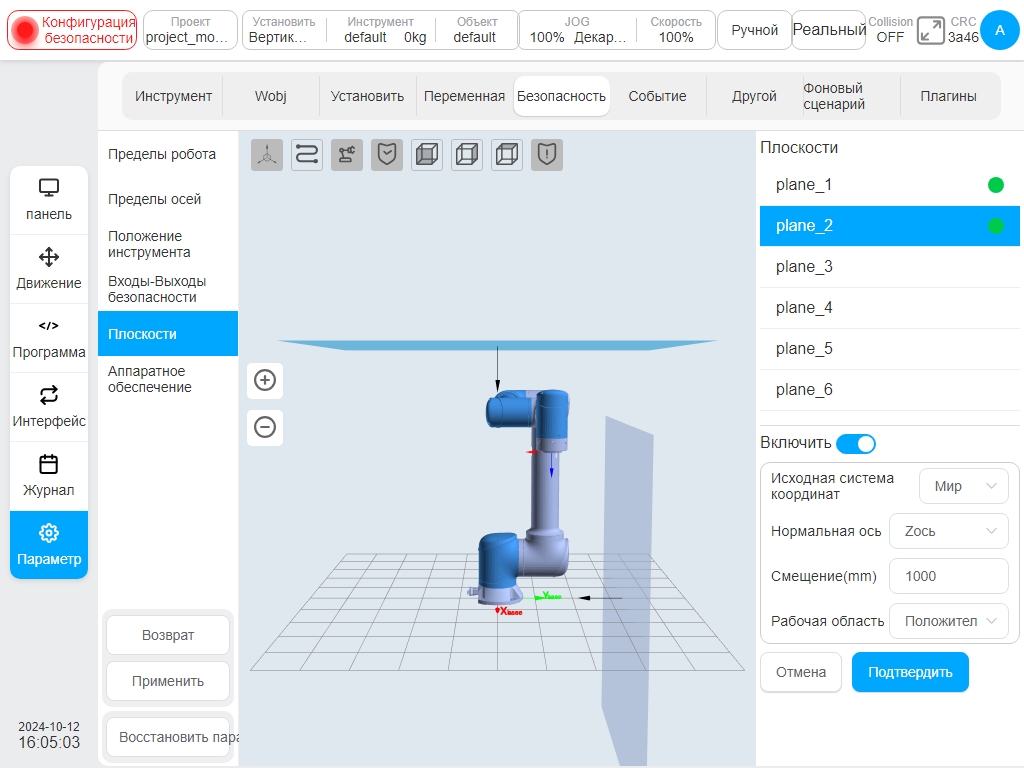
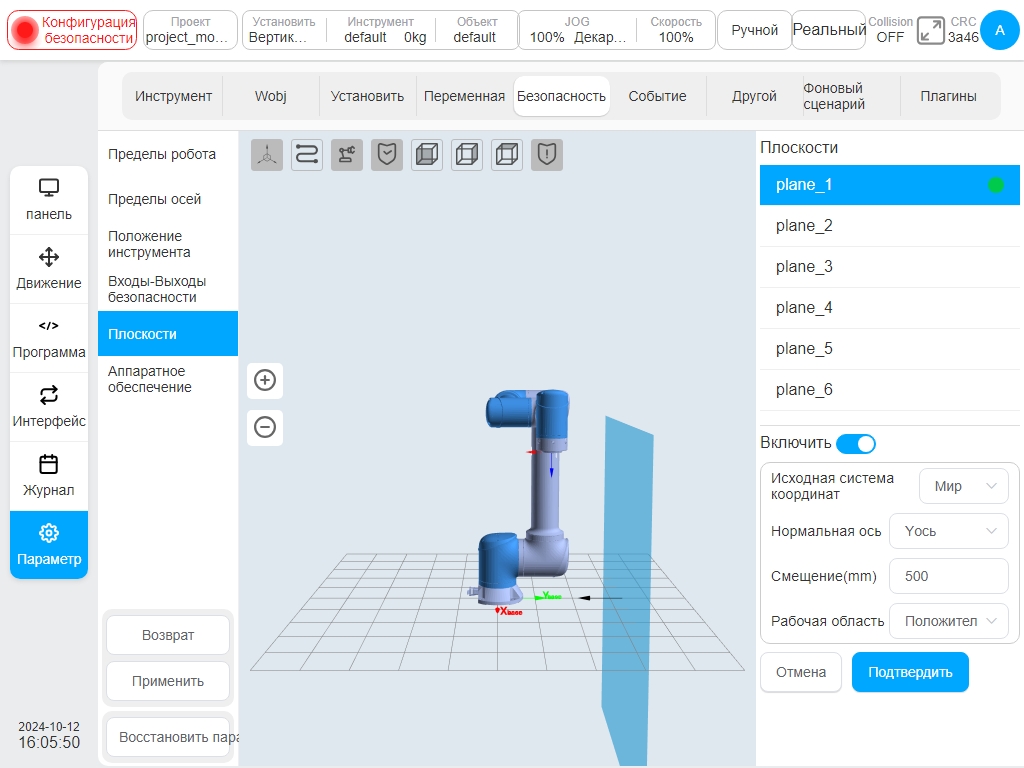
Для ограничения рабочего пространства робота можно использовать виртуальные границы. Можно определить шесть виртуальных границ для ограничения инструментов и локтей робота. Когда инструменты и локти робота коснутся виртуальной границы, робот выполнит остановку с защитой.
Зеленый индикатор в правой части интерфейса указывает на то, что плоскость активирована. а на 3D-дисплее можно увидеть местоположение активированной виртуальной границы и эффективную площадь виртуальной границы. При выборе плоскости соответствующая плоскость будет выделена на 3D-дисплее.
Виртуальные границы определяются следующими способами:
Выберите опорную систему координат, которая может быть мировой системой координат, базовой системой координат или системой координат заготовки, определенной в настройках; выберите одну из осей (X, Y, Z) опорной системы координат в качестве нормальной оси виртуальной плоскости и задайте расстояние смещения вдоль оси; положительное значение расстояния смещения означает положительное смещение вдоль координатной оси, а отрицательное значение - отрицательное смещение вдоль координатной оси. Таким образом, определяется плоскость, а затем выбирается область эффективной активности манипулятора робота, расположенная на этой стороне плоскости. Например, если опорная система координат выбрана в качестве базовой системы координат, ось Z выбрана в качестве нормальной оси, а расстояние смещения установлено на 600 мм, то виртуальная плоскость формируется путем смещения плоскости XoY базовой системы координат к оси Z в положительном направлении на 600 мм.
На следующем рисунке показано соответствующее взаимодействие. Выберите плоскость, нажмите кнопку «Включить» и «Редактировать», выберите систему координат, нормальную ось, введите расстояние смещения, выберите эффективную область. Нажмите кнопку «ОК», чтобы определить виртуальную границу, стрелки, отображаемые на виртуальной плоскости, указывают на активную область робота.
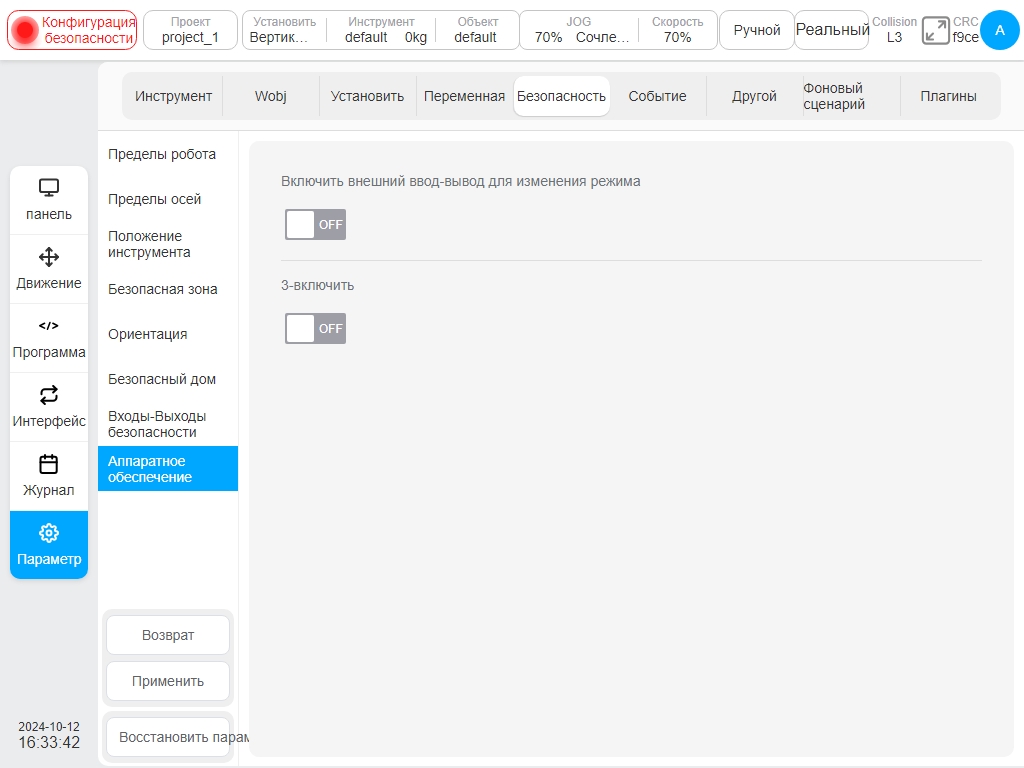
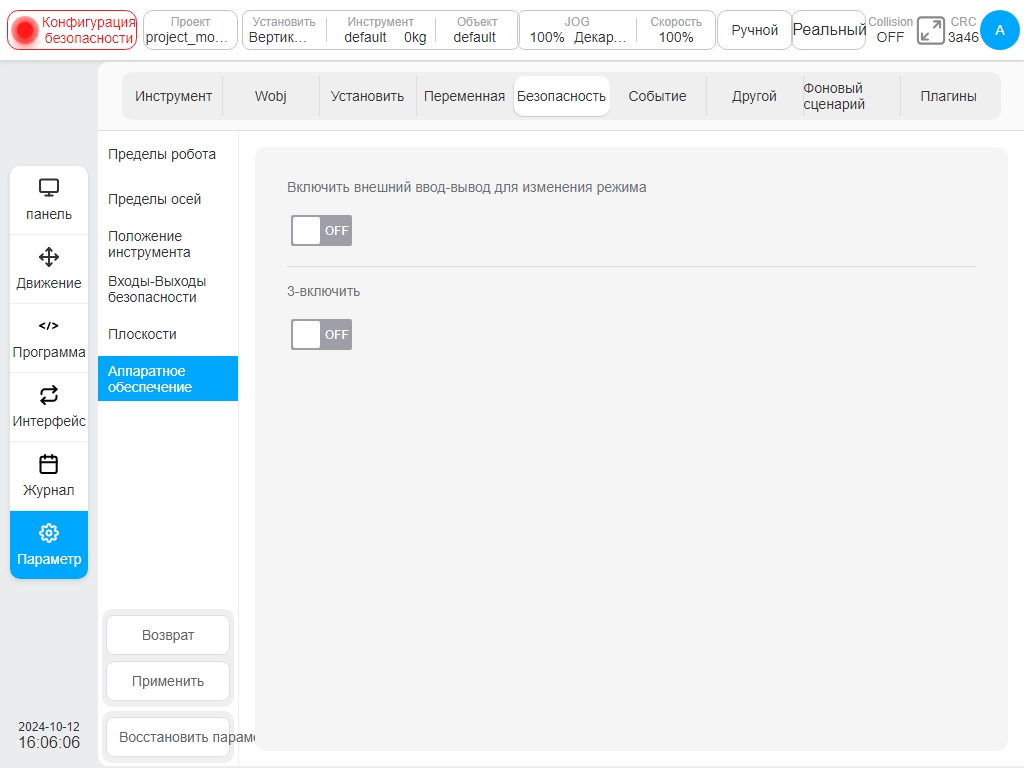
Оборудование#
Включает в себя включение внешнего ввода-вывода для переключения режимов и трехпозиционный вход разрешения.
Включить внешний IO для переключения режимов:Если этот пункт включен, ручное переключение режимов может осуществляться через внешний IO. Функция переключения режимов в строке состояния интерфейса недействительна.
Three-position Enable Input:Если этот элемент включен, то, тем временем, когда робот находится в ручном режиме, робот может перемещаться только тогда, когда трехпозиционный переключатель на обучающем кулоне находится в среднем положении. Если во время движения робота трехпозиционный переключатель находится в несреднем положении, срабатывает функция остановки робота.
DucoSafety V2.0#
Просмотр конфигураций безопасности#
Нажмите кнопку «Проверка безопасности» в строке состояния. Отобразится следующее диалоговое окно для просмотра активированных в данный момент параметров конфигурации безопасности.
Пользователь также может просмотреть параметры конфигурации безопасности на странице настроек - Настройки безопасности.
Заявка на изменение конфигурации безопасности#
Перед изменением конфигурации безопасности пользователь должен использовать пароль для разблокировки робота. Войдите на страницу „Setup“ - „Security Configuration“, нажмите кнопку „Unlock“ в левом нижнем углу, только в случае отключения питания может быть разблокирован, введите пароль (пароль входа текущего зарегистрированного пользователя), а затем войдите в режим конфигурации параметров безопасности после прохождения проверки. В это время в строке состояния отображается надпись „Security Parameter Configuration“.

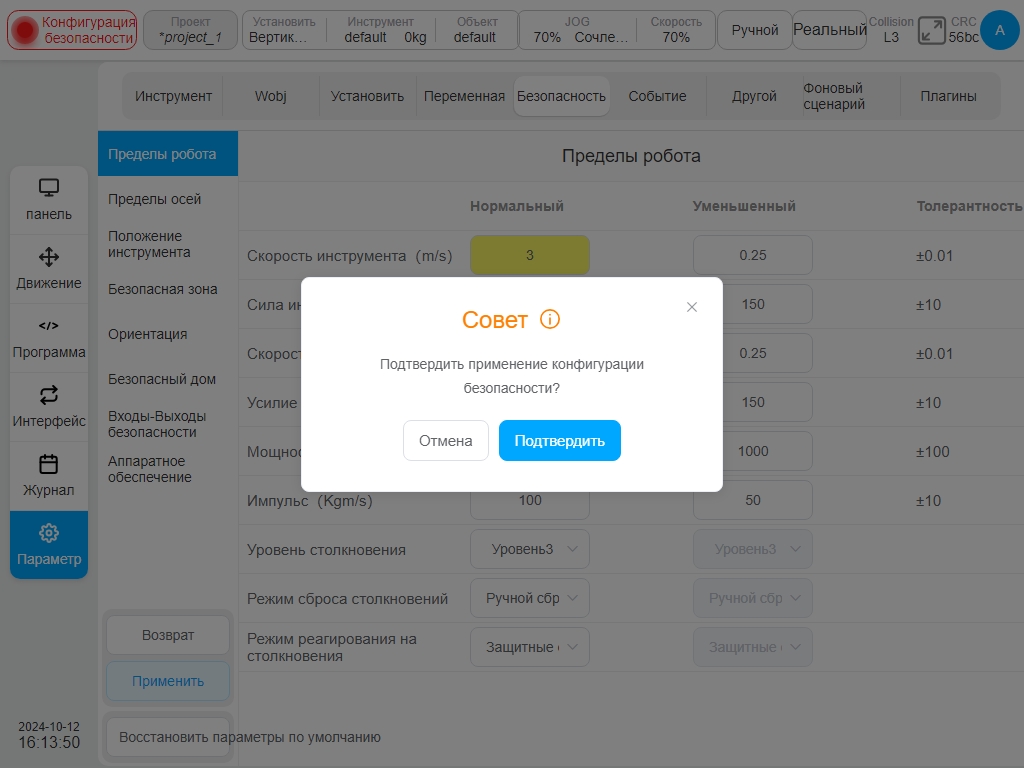
После нажатия кнопки «Подтвердить» появится окно запроса на загрузку параметров безопасности, как показано на рисунке.
После настройки параметров безопасности система отображает настроенные параметры безопасности в диалоговом окне для проверки. Проверьте и подтвердите следующий рисунок. Нажмите кнопку „OK“, чтобы установить параметры безопасности. После успешной настройки над строкой состояния изменится надпись «Проверка безопасности».
Описание параметров безопасности#
В этом разделе описываются параметры конфигурации безопасности робота.
Режим безопасности#
Нормальный режим:По умолчанию активирован безопасный режим.
Режим уменьшения:Этот режим может быть активирован с помощью защитного входа IO.
Режим восстановления:Когда фактические параметры движения робота превышают предел безопасности, что приводит к остановке робота, активируется режим восстановления, и пользователь может перемещать робота в пределах предела безопасности.
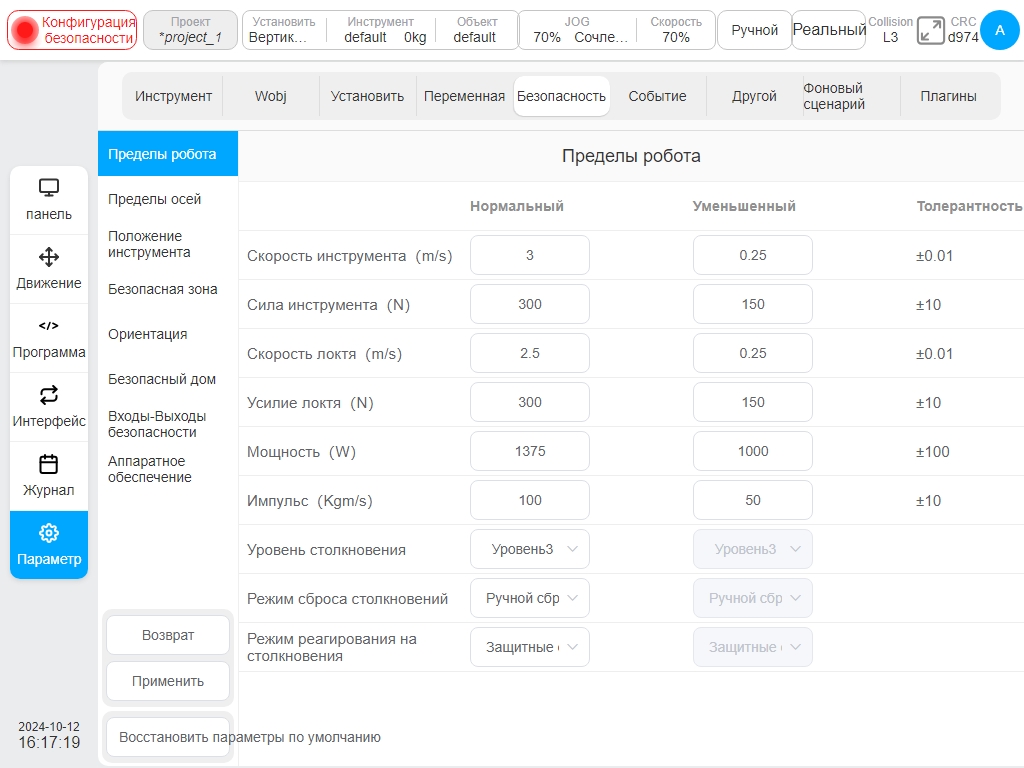
Параметры безопасности робота#
Параметры робота используются для ограничения общего движения робота. Пользователь может настроить значения параметров в обычном режиме и в режиме уменьшения.
Максимальная скорость конца Ограничивает максимальную скорость конца робота.
Максимальная конечная сила Ограничивает максимальную силу, прикладываемую снаружи к концу робота.
Максимальная скорость локтя Ограничивает максимальную скорость локтя робота.
Максимальное усилие на локте Ограничивает максимальную внешнюю силу, прикладываемую к локтю робота.
Мощность Ограничивает максимальную механическую работу, выполняемую роботом, снаружи, а конец нагрузки робота рассматривается как часть корпуса робота.
Максимальный момент Ограничивает максимальный момент выхода робота, при этом конец груза робота рассматривается как часть тела робота.
Уровень обнаружения столкновений Чувствительность робота к обнаружению столкновений с внешним миром, чем выше уровень, тем выше чувствительность.
Режим сброса при столкновении Метод сброса робота после столкновения.
Режим реагирования на столкновения Метод реагирования робота после столкновения.
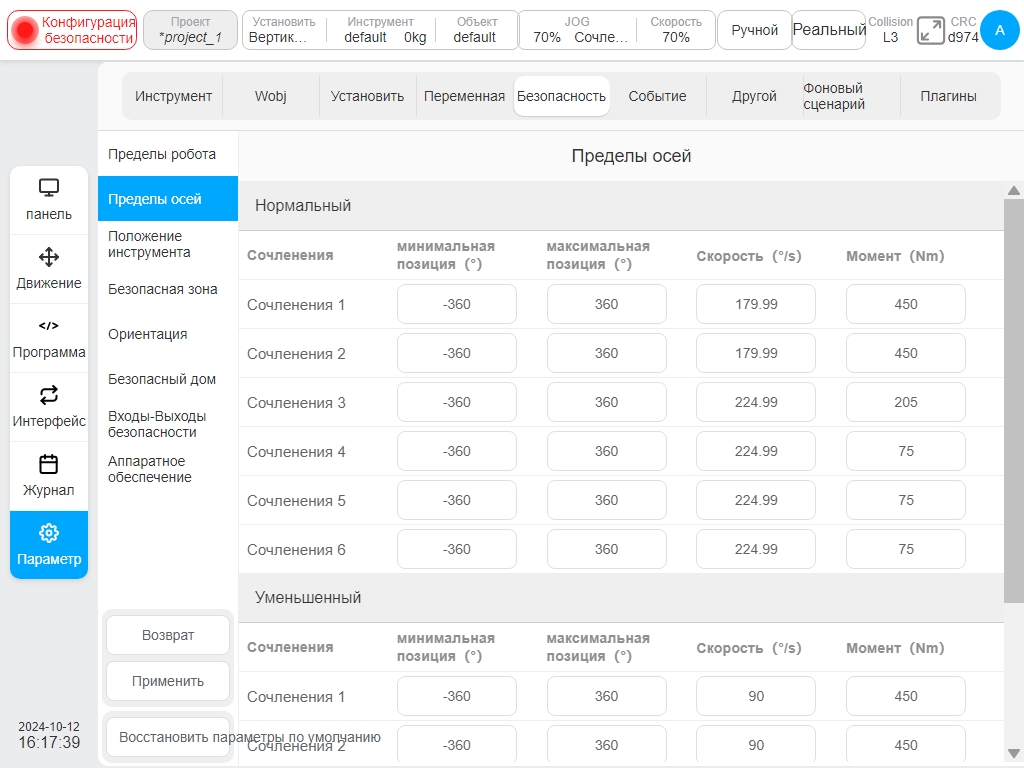
Параметры совместной безопасности#
Ограничение параметров сустава используется для ограничения диапазона положения, максимальной скорости и максимального крутящего момента каждого сустава робота. Пользователь может настраивать значения параметров как в обычном, так и в сокращенном режиме.
Position Range:определяет минимальное и максимальное положение каждого сустава.
Maximum Velocity:Определяет максимальную угловую скорость каждого сустава.
Максимальный крутящий момент:Определяет максимальный крутящий момент каждого шарнира.
ПТС и инструменты#
Система безопасности может определить три набора смещений TCP, которые, когда они настроены, будут использоваться роботом для контроля скорости и местоположения. Любое из значений положения и скорости TCP, превышающих настройки безопасности, вызовет нарушение безопасности.
Контроль скорости - это максимальная линейная скорость центра ПТС безопасности робота в пространстве в «Параметрах безопасности робота», а контроль местоположения также называется «Безопасной зоной». Можно задать три ПТС безопасности, при этом существует два способа определения ПТС: выбор системы координат инструмента, заданной в глобальных переменных, или настройка значения входной системы координат. Если используется предопределенная система координат инструмента, то выбирается система координат инструмента и значение системы координат инструмента отображается в поле ввода X, Y, Z. Если значения X, Y, Z изменены, система координат становится настраиваемой. Если значение соответствующей системы координат в глобальной переменной изменено и не совпадает со значением системы координат, используемой в текущих настройках безопасности, появится значок предупреждения „!“. Если выбрана опция «Пользовательские входные данные», значения X, Y, Z, Rx, Ry, Rz и радиус шара оболочки редактируются напрямую.
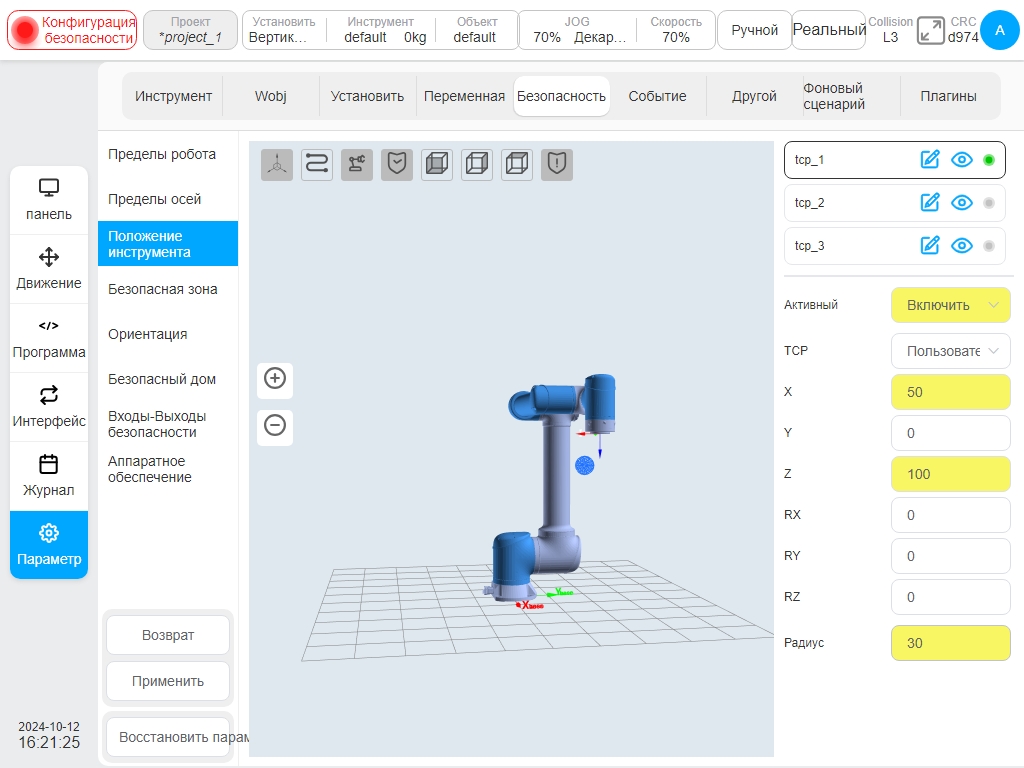
Каждый ПТС безопасности может быть установлен как отключенный, всегда активный, активный в автоматическом режиме, комбинированная конфигурация безопасности 1, комбинированная конфигурация безопасности 2 с пятью различными видами условий активации. Если все три TCP отключены, система управления безопасностью по умолчанию переходит на фланцевую систему координат с радиусом шара 50 мм. Состояние конфигурации TCP отображается в списке конфигурации TCP. Если определенный TCP отключен, соответствующий статус отображается серым цветом. Настроенный безопасный TCP может отображать систему координат и сферу оболочки в области 3D-дисплея и передавать соответствующее имя TCP с отображением и скрытием значка  . Щелкните рядом с именем TCP
. Щелкните рядом с именем TCP  Icon, чтобы изменить имя TCP по умолчанию. Безопасный TCP, который не отключен, отображается
Icon, чтобы изменить имя TCP по умолчанию. Безопасный TCP, который не отключен, отображается  . В противном случае он будет отображаться
. В противном случае он будет отображаться  .
.
Зона безопасности#
Типы определения зон безопасности включают плоскость, прямоугольник и цилиндр. Пользователи могут задать до шести независимых пространственных зон. Щелкните значок рядом с названием зоны безопасности, чтобы отобразить или скрыть настроенную зону безопасности в зоне 3D-отображения. А значок рядом с названием зоны безопасности (например, название по умолчанию zone_1) можно нажать, чтобы изменить ее название. будет отображаться, если безопасная зона не отключена, в противном случае будет отображаться .
Конфигурации активации зоны безопасности включают: Отключена, Всегда активна, Автоматический режим активен, Конфигурация группы безопасности 1 и Конфигурация группы безопасности 2.
Реакция на границу зоны безопасности относится к реакции робота, входящего в зону безопасности снаружи и выходящего за границу изнутри. Существует два режима реагирования, а именно: ограничение движения за границу и включение режима уменьшения при входе в зону. Когда выбранный предел выходит за границы, описывается реакция робота, выходящего за границы. Когда выбран режим уменьшения, описывается реакция робота, входящего в зону снаружи, и восстанавливается нормальный режим, когда робот покидает зону.
Пространственная зона также может включать в себя границы локтя, при этом пространственный диапазон локтя задается в виде сферического радиуса.
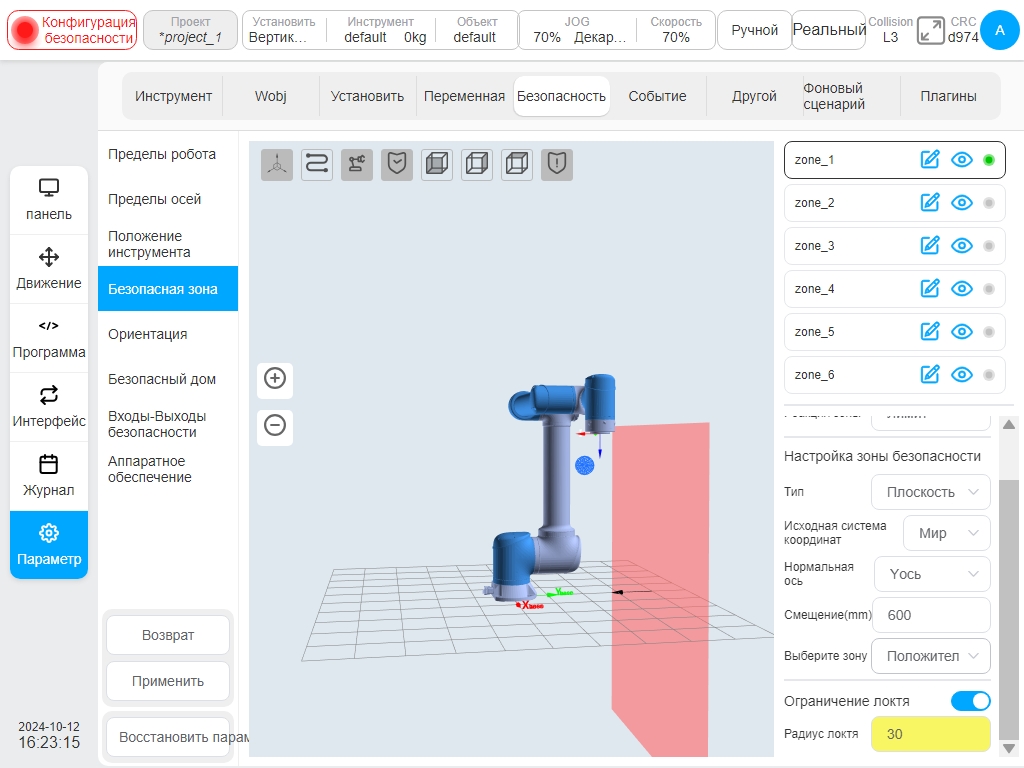
Если тип зоны конфигурации - плоскость, ссылка зоны плоскости основана на мировой системе координат/базе/заданной системе координат заготовки, а плоскость определяется путем задания нормали и нормального смещения плоскости. Настройки плоскости можно задать, выбрав область, и соответствующее направление отображается черной стрелкой в 3D-зоне.
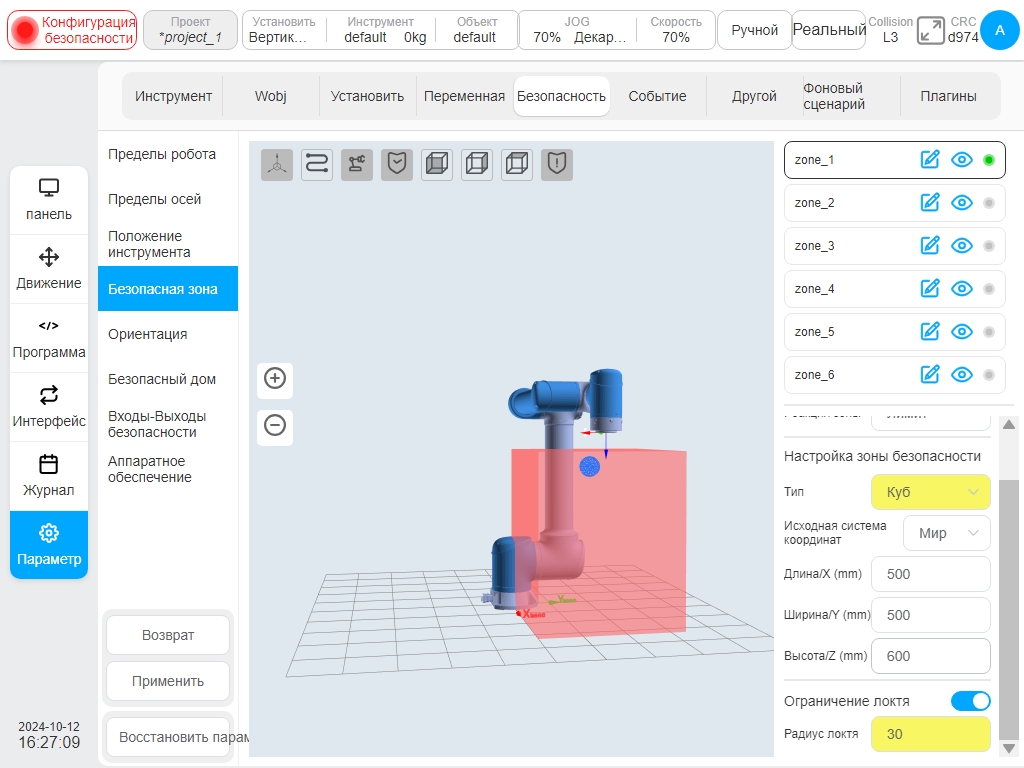
Если тип зоны конфигурации - пространственный кубоид, то в качестве основы для настройки зоны кубоида используется мировая система координат/базовая система координат/установленная система координат заготовки, а система координат заготовки используется как угловая точка кубоида, при этом три направления координатных осей соответствуют длине (X), ширине (Y) и высоте (Z) соответственно. Длина, ширина и высота варьируются от -3000 мм до 3000 мм.
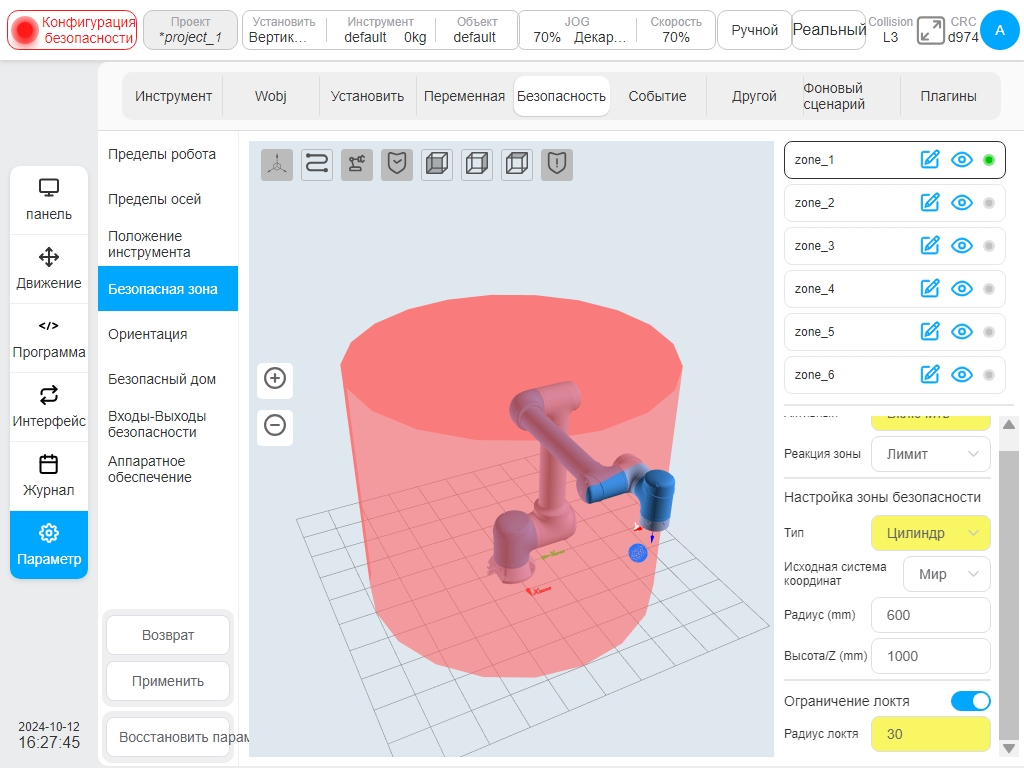
Если тип зоны конфигурирования - пространственный цилиндр, то в качестве опорной точки используется мировая система координат/базовая система координат/система координат заготовки, при этом система координат заготовки является центром плоскости окружности, направление Z указывает на направление высоты, а радиус и высота могут быть заданы. Радиус варьируется от 0 до 3000 мм, а высота - от -3000 мм до 3000 мм.
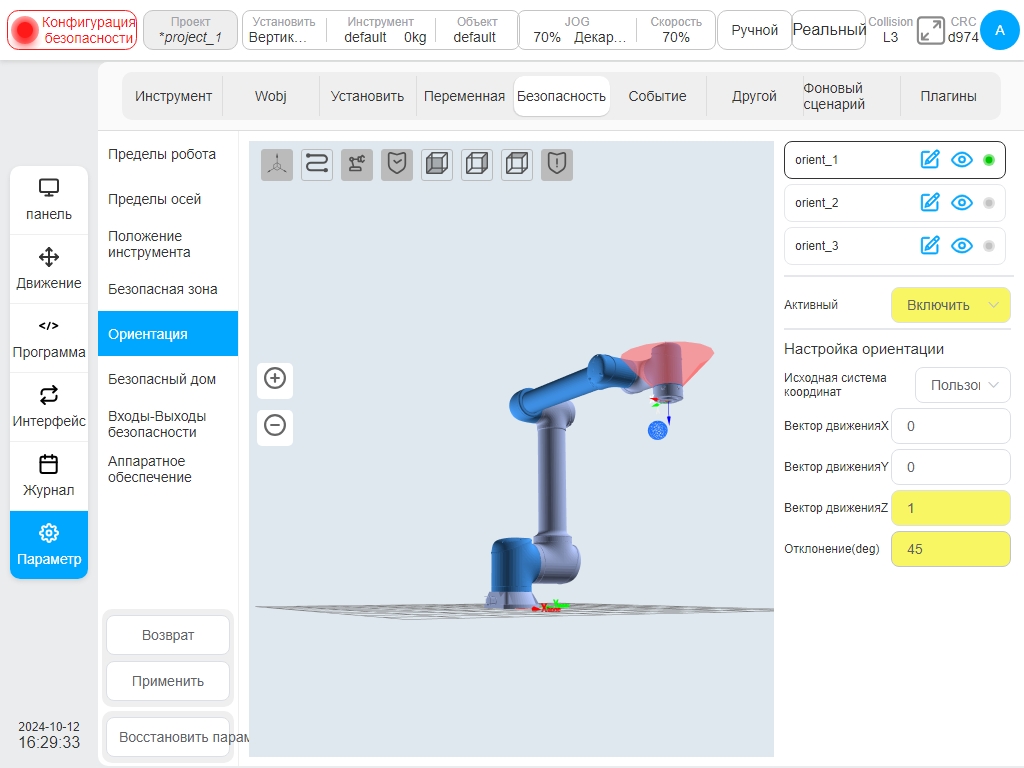
Зона безопасной осанки#
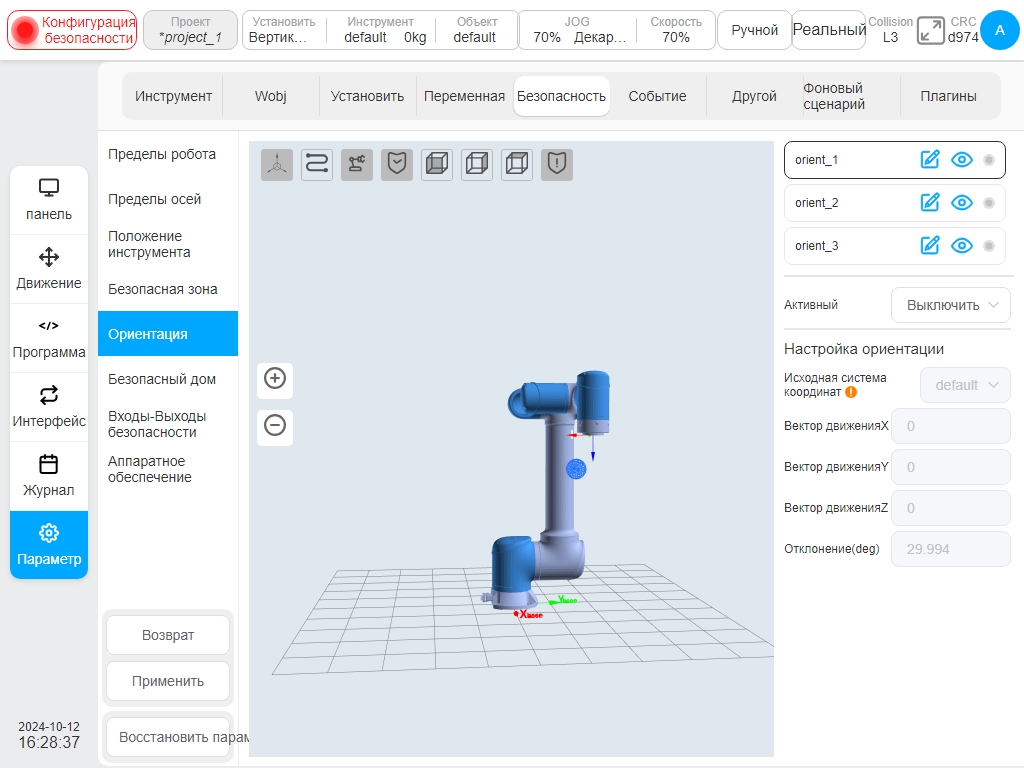
Настройка зоны позы безопасности. Под зоной позы понимается формирование угла конуса вокруг вектора направления в базовой системе координат робота. Ограничение позы ограничивает только ось Z TCP робота в зоне позы. Пользователи могут задать до трех зон позы. Одна зона позы может быть показана или скрыта нажатием на значок рядом с названием справа от зоны позы, который по умолчанию установлен на отображение. Значок после названия можно нажать, чтобы изменить название зоны позы. Значок будет отображаться, если зона позы не отключена, в противном случае будет отключен.
Зона безопасности может быть активирована в пяти режимах: Отключена, Всегда активна, Автоматический режим активен, Конфигурация группы безопасности 1 и Конфигурация группы безопасности 2. Зона безопасного положения отличается от зоны безопасности тем, что ограничивается только направление TCP по оси Z и существует только один режим реагирования, который запускает защитную остановку после превышения зоны.
Существует три способа определения опорной системы координат для зоны безопасной позы: Пользовательский, захват текущей позы TCP и определение ее через предопределенную систему координат заготовки. При выборе пользовательского режима вручную изменяется значение вектора направления X, Y, Z, который описывает значение в базовой системе координат робота; При выборе текущего положения ПТС направление оси z текущего ПТС принимается за опорное направление зоны позы, и направление преобразуется в базовую систему координат робота для описания вектора направления X, вектора направления Y, вектора направления Z. Если значение изменяется вручную, оно становится пользовательским режимом. При определении через систему координат заготовки направление оси Z системы координат заготовки принимается за базовое направление зоны осанки и преобразуется в базовую систему координат робота, после ручной модификации значение будет изменено на пользовательский режим.
Если ориентация системы координат заготовки была изменена внешним образом, то на базовой системе координат отображается значок напоминания . Угол отклонения зоны варьируется от 5 до 180 градусов. Например:
Безопасность дома#
Для настроек «Безопасный дом» мониторинг «Безопасный дом» синхронизирует настройки местоположения дома на странице настроек «Другое». Если местоположение в настройках «Безопасный дом» отличается от местоположения дома в настройках «Другое», в разделе «Синхронизировать настройки дома» отображается значок напоминания . Если настройки не синхронизированы, исходное положение системы зависит от настроек безопасности. Настройки контроллера безопасности преобладают для точки «Home» на мобильном интерфейсе и для вывода сигналов «Home» из других портов (например, порта 2001) робота. Точка Home на странице настроек „Other“ используется только в качестве записи и не служит основой для оценки точки Home. Можно установить порог контроля точки «Дом», значение которого варьируется от 1 до 5°.
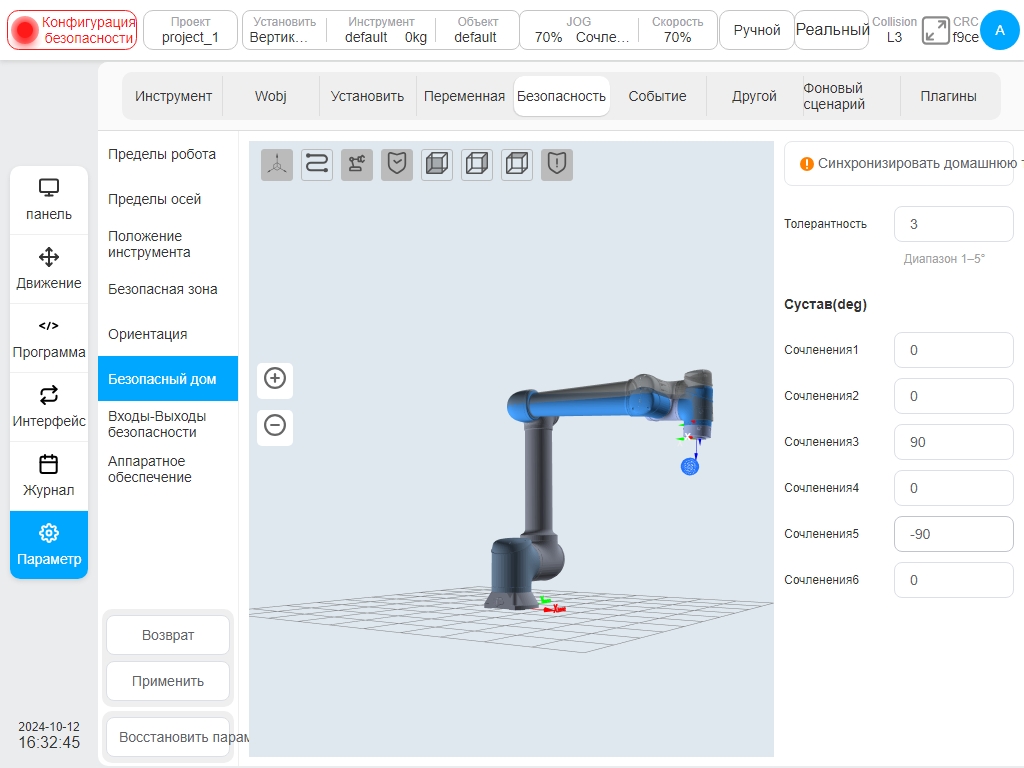
При выборе синхронизации исходного местоположения отображается угол сочленения исходного местоположения. И модель робота в области отображения 3D-модели обновляется до соответствующего местоположения.
Когда задано безопасное исходное положение и выход исходного положения сконфигурирован в защитном входе/выходе (см. раздел 6.2.3.8), все углы сочленений робота находятся в заданном диапазоне исходного положения (уставка-порог, уставка + порог), а скорость близка к 0°/с (чтобы отфильтровать обычное биение энкодера). Заданная системой скорость движения суставов составляет менее 2°/с) и длится 500 миллисекунд (задано системой и не может быть сконфигурировано), поскольку сигнал поступает на внешний выход безопасности домашнего положения.
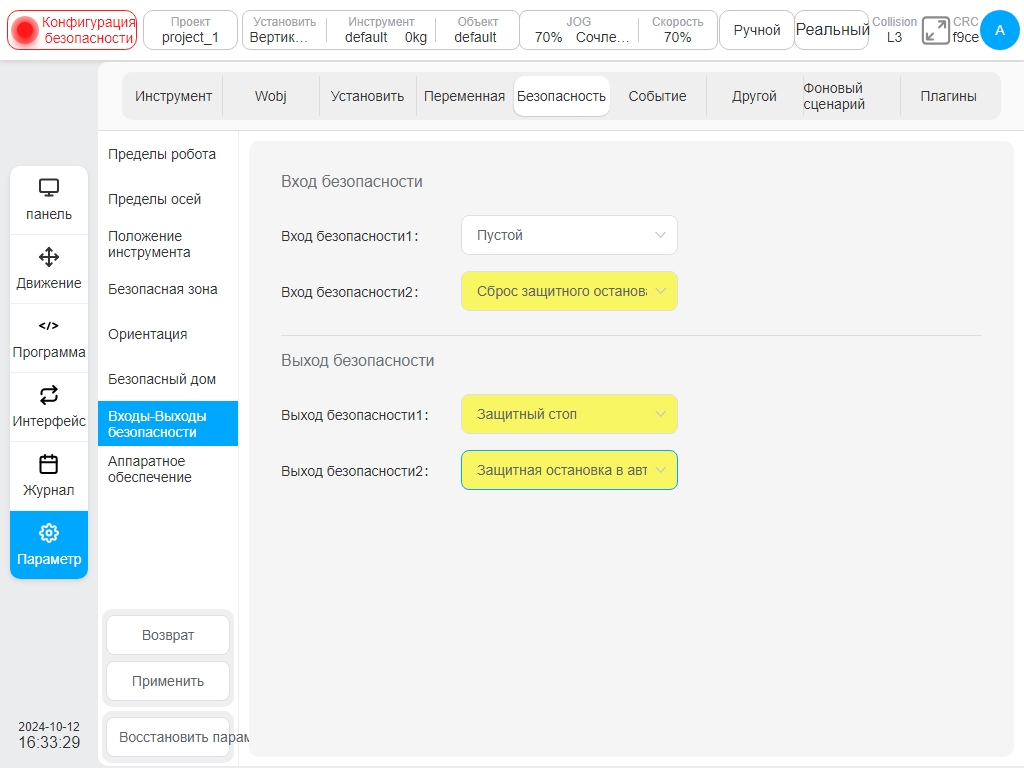
Безопасность IO#
Модуль ввода/вывода безопасности содержит два конфигурируемых входных порта безопасности и два конфигурируемых выходных порта безопасности.
Безопасность включает в себя следующие функции:
Вход защитного сброса: когда происходит защитная остановка, порт срабатывает, и робот возвращается в нормальное состояние.
Вход защитной остановки в автоматическом режиме:После настройки, когда робот запускает порт в автоматическом режиме, он выполняет защитную остановку.
Вход сброса защиты в автоматическом режиме:При остановке защиты в автоматическом режиме срабатывает порт, и робот возвращается в нормальное состояние.
Вход режима уменьшения:После настройки этот порт срабатывает, и робот переходит в режим уменьшения. Робот будет замедляться до тех пор, пока пределы параметров не достигнут пределов безопасности в режиме уменьшения.
Конфигурация комбинации безопасности 1/2:При срабатывании порта конфигурации комбинации безопасности 1 или конфигурации комбинации безопасности 2 активируются и контролируются все функции безопасности, настроенные в конфигурации комбинации безопасности 1 или конфигурации комбинации безопасности 2, включая инструменты безопасности, зоны безопасности и зоны безопасного положения.
Безопасность на выходе включает в себя:
Выход защитного останова:Этот порт срабатывает, когда робот находится в состоянии защитного останова.
Выход защитного останова в автоматическом режиме:Этот порт срабатывает, когда робот находится в автоматическом режиме защитного останова.
Выход режима уменьшения:Этот порт срабатывает, когда робот находится в режиме уменьшения.
HOME Location:Этот порт срабатывает, когда робот находится вблизи безопасного места проживания;
Оборудование#
Включает внешние входы ввода-вывода для переключения режимов и три входа разрешения положения
Enable External IO for Mode Switching:Если этот пункт включен, ручное переключение режимов может осуществляться через внешние IO. Функция переключения режимов в строке состояния интерфейса недействительна.
Вход разрешения трехпозиционного управления:Если этот вход включен, то в ручном режиме робот может перемещаться только тогда, когда трехпозиционный переключатель на обучающем кулоне находится в среднем положении. Если во время движения робота трехпозиционный переключатель находится в несреднем положении, робот будет остановлен.