


Переместить страницу#
Нажмите кнопку «Переместить» на панели навигации, чтобы перейти на страницу перемещения, как показано на рисунке.
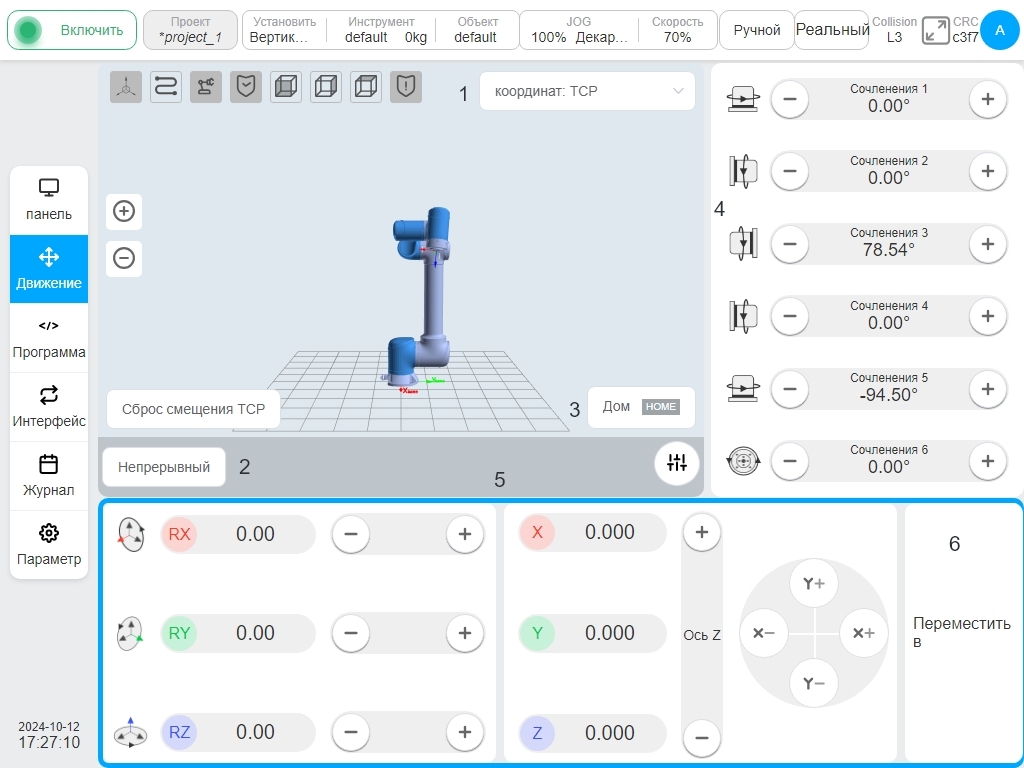
Модель 3D-симуляции отображается в левой верхней части страницы, нажмите кнопку ① Selector, пользователь может выбрать систему координат, используемую текущим роботом, и опорную систему координат для ручного управления роботом, по умолчанию будет использоваться мировая система координат (то же самое, что и базовая система координат в этой системе), что означает, что база робота используется в качестве базовой точки координат. Также можно выбрать систему координат инструмента и систему координат заготовки. Система координат инструмента означает, что конечная точка концевого инструмента является базовой точкой координат, а система координат заготовки задается пользователем произвольно. После переключения опорной системы координат данные о позиционировании робота в декартовых координатах, отображаемые на интерфейсе, будут соответствующим образом изменены.
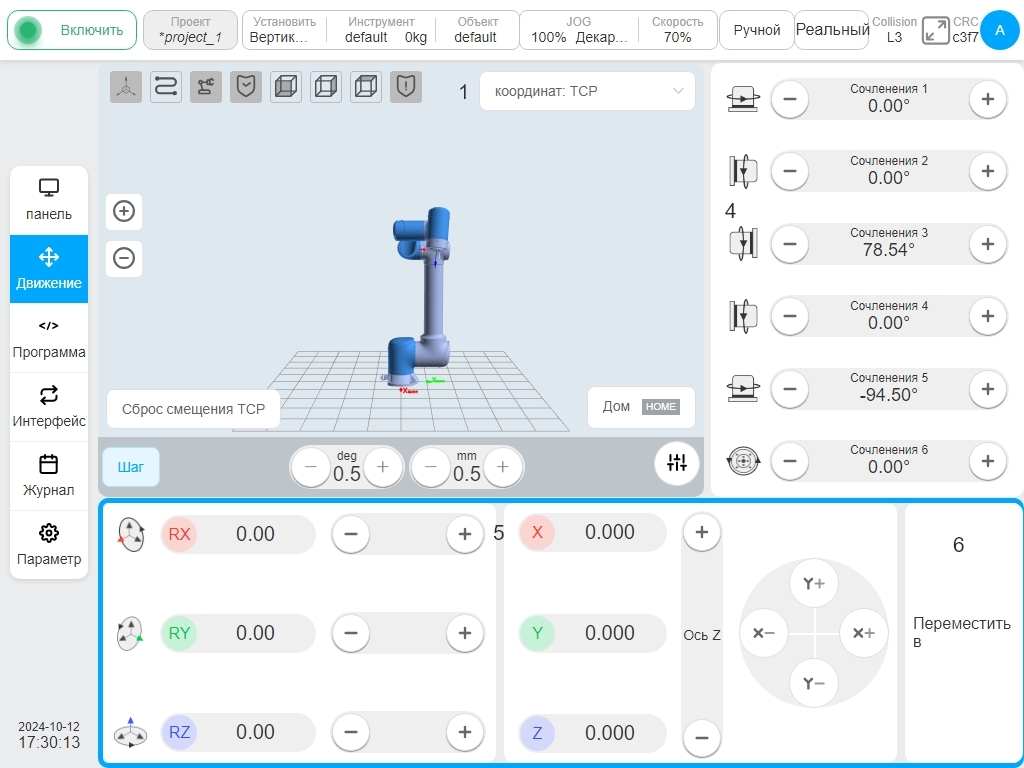
Иконка ② - это кнопка, которая позволяет пользователю переключать режимы, а режим, отображаемый на кнопке, - это выбранный в данный момент режим движения. Нажмите кнопку «Непрерывный режим», чтобы переключиться в «Шаговый режим», и в интерфейсе появятся кнопки регулировки угла и расстояния шага, а также окно отображения данных. По умолчанию угол шага и расстояние шага для заданного пользователем движения составляют 0,5deg и 0,5 мм, минимально допустимые настройки - 0,1deg и 0,1 мм, а максимально допустимые - 5deg и 5 мм для регулировки угла шага и расстояния шага.
Значок ③ - это кнопка «Нажмите и удерживайте для сброса». При нажатии и удержании этой кнопки робот переместится в заданную точку HOME, а при отпускании кнопки движение прекратится. По умолчанию исходной точкой является 0° для каждого сустава, и робот находится в вертикальном положении. Когда робот перемещается к кнопке «HOME», надпись «Hold Down and Return» меняется на зеленую, указывая на то, что робот достиг точки HOME, как показано на рисунке.
Область ④ - это область, в которой движутся суставы робота, управляемые вручную. Когда пользователь нажимает в любом месте этой области, область отображается с синей рамкой, что означает, что в данный момент робот перемещается вручную. Нажатие и удержание кнопки со стрелкой влево или стрелкой вправо на шарнире приводит к перемещению шарнира в прямом или обратном направлении, а отпускание кнопки останавливает движение шарнира. Пользователи также могут перемещать суставы, нажимая и удерживая кнопки «+» и «-» на правой стороне обучающего кулона, которые соответствуют суставам 1-6 сверху вниз.
Область ⑤ - это область, в которой конец робота с ручным управлением перемещается в декартовой системе координат. При щелчке в любой точке этой области появится синяя рамка, отображающая текущее движение конца робота с ручным управлением. Нажатие и удержание кнопок осей X, Y и Z изменяет положение робота в декартовой системе координат, нажатие и удержание кнопок RX, RY и RZ изменяет положение робота в декартовой системе координат, а отпускание соответствующих кнопок останавливает движение робота. Аналогичным образом пользователь может изменить позиционное положение робота, нажав и удерживая кнопки «+» и «-» на правой стороне обучающего кулона. Кнопки соответствуют шести направлениям движения: X, Y, Z, RX, RY и RZ, соответственно, сверху вниз.
Осторожно
При использовании физической кнопки Jog robot на обучающем пульте необходимо убедиться, что управление движением в пространстве суставов или в декартовом пространстве осуществляется в соответствии с текущим активным состоянием (синяя рамка).
Значок ⑥ - это кнопка переключения, с помощью которой пользователь может вручную ввести угол сочленения или значение позы и удерживать кнопку для перемещения робота. При нажатии кнопки «Переместить в» в области ④ и области ⑤ отображается окно ввода угла наклона сустава и значения позы соответственно, а в области 3D-модели отображается серая модель робота в месте расположения целевой точки. В области 3D-модели будет отображена серая модель робота в месте расположения целевой точки, как показано на рисунке:
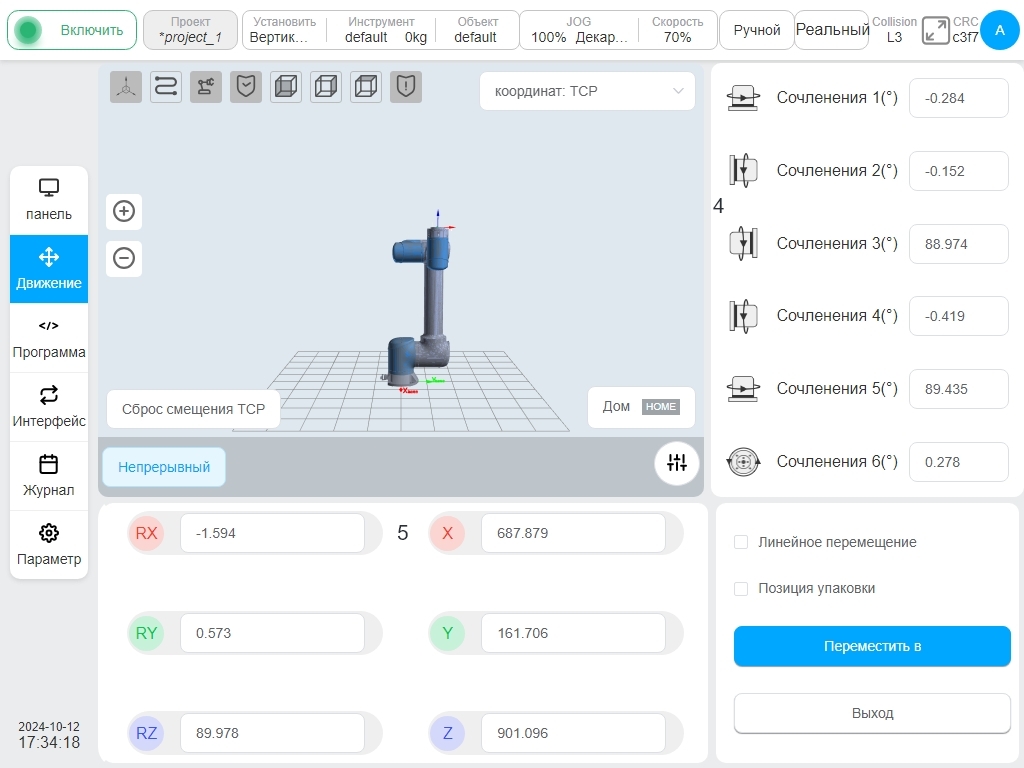
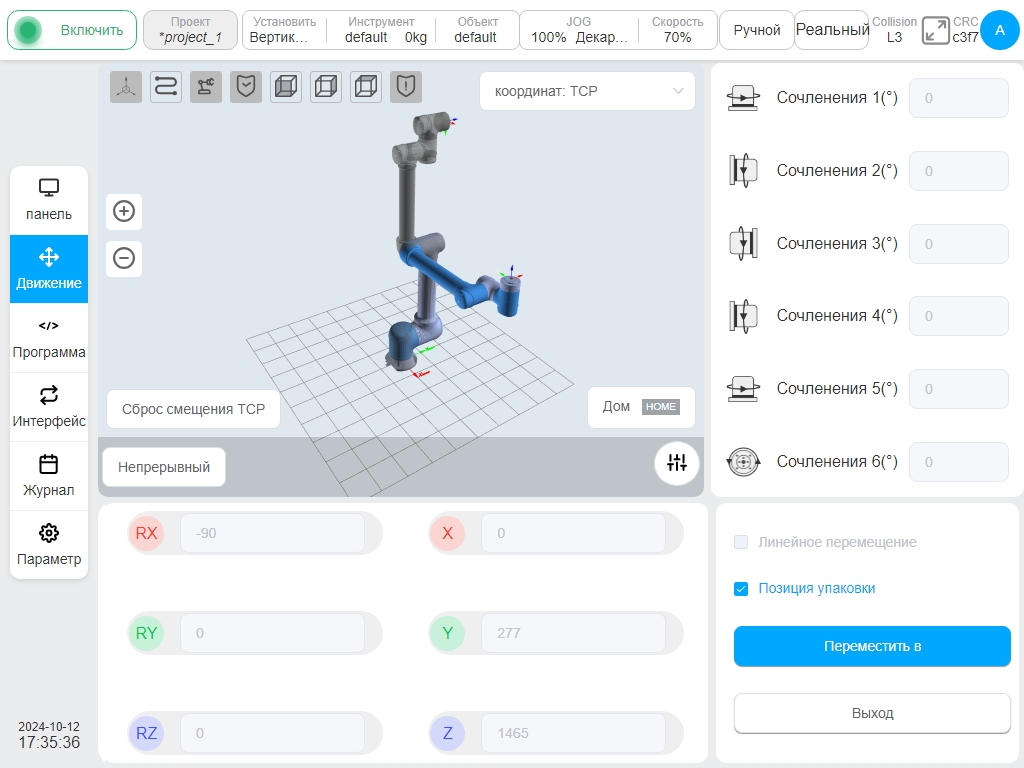
Нажмите на поле ввода угла наклона сустава и значения положения, чтобы открыть виртуальную цифровую клавиатуру. После ввода данных о целевом положении в виртуальную цифровую клавиатуру нажмите клавишу «Esc», чтобы закрыть виртуальную цифровую клавиатуру. Затем нажмите и удерживайте кнопку „Move to“, робот переместится в целевую позицию, отпустите кнопку, и робот прекратит движение. Если установлен флажок «Прямолинейное движение», это означает, что робот движется к целевой позиции по прямой линии; в противном случае робот движется к целевой позиции по шарниру. Если установлен флажок „Packed Attitude“, радиокнопка „Linear Move“ отключается, поля ввода угла сустава и отношения декартовой позиции отключены, а радиокнопка „Linear Move“ отключена для отмеченной радиокнопки „Linear Move“. При снятии флажка «Линейное перемещение» значения угла наклона суставов и отношения положения будут показаны как фиксированные значения в отношении упаковки, что указывает на то, что робот будет перемещаться в положение упаковки с помощью суставов, а нажатие кнопки «Выход» приведет к выходу из интерфейса ручного ввода целевого положения и возврату в исходный интерфейс перемещения. Как показано на рис:
Иконка ⑦ - это кнопка «Сброс смещения инструмента», которая отображается только в том случае, если в качестве системы координат инструмента выбрана опорная система координат перемещаемой страницы. Когда пользователь нажимает эту кнопку, положение в момент нажатия будет использоваться в качестве опорной начальной точки, и положение робота будет отображаться в реальном времени в области ⑤ во время движения робота с учетом смещения относительно опорной начальной точки в момент нажатия кнопки. Исходная точка для расчета смещения TCP не обновляется до тех пор, пока пользователь снова не нажмет кнопку „Tool Offset Reset“.