


Безопасность#
Обзор#
В этом документе представлена важная информация, касающаяся вопросов безопасности и оценки рисков, на которую следует обратить внимание при установке, использовании и обслуживании робота и его компонентов, и которая должна быть прочитана и понята пользователем перед первым включением робота.
Перед выполнением любой операции убедитесь, что вы ознакомились со всеми инструкциями по эксплуатации, прилагаемыми к устройству, особенно с опасностями, предупреждениями и мерами предосторожности, которые могут угрожать безопасности человека и устройства, чтобы свести к минимуму вероятность несчастного случая. Если данный документ отличается от документа, поставляемого вместе с устройством, то преимущественную силу имеет документ, поставляемый вместе с устройством.
Персонал, отвечающий за установку и обслуживание устройства, должен быть обученным специалистом, освоившим правильные методы работы и все меры предосторожности. К установке и обслуживанию устройств допускается только обученный и квалифицированный персонал.
Эффективная сфера деятельности и заявление об ответственности#
В данной информации не рассматриваются вопросы проектирования, установки и эксплуатации всей роботизированной системы, а также все периферийные устройства, которые могут повлиять на безопасность всей системы. Хорошо спроектированная система необходима для обеспечения безопасности персонала и должна быть установлена в соответствии с требованиями безопасности, изложенными в стандартах и правилах той страны, где будет установлен робот.
Интегратор роботов несет ответственность за то, чтобы роботизированная система соответствовала действующим законам и нормам безопасности страны или региона, в котором она расположена, а также за то, чтобы необходимое устройство безопасности для защиты оператора роботизированной системы было надлежащим образом спроектировано и установлено.
Детали включают в себя следующее, но не ограничиваются этим:
Убедитесь, что роботизированные системы отвечают всем основным требованиям;
Проведите оценку рисков всей системы;
Обеспечьте точность проектирования и установки всей системы;
Сделайте соответствующие настройки безопасности в программном обеспечении и убедитесь, что они не будут изменены пользователями;
Разработайте подробную инструкцию по эксплуатации;
Выдать декларацию о соответствии;
Соберите всю информацию в технической документации;
Наклейте на установленную роботизированную систему логотип и контактную информацию интегратора.
Компания DUCO Robots Co., Ltd. обязуется предоставлять достоверную информацию о безопасности и не несет ответственности, за исключением случаев умышленной или грубой халатности со стороны компании DUCO Robots Co., Ltd. в предоставлении достоверной информации о безопасности. Следует иметь в виду, что даже если все сделано в соответствии с правилами безопасной эксплуатации, нет никакой гарантии, что роботизированная система не нанесет личный и имущественный ущерб пользователю.
Компания DUCO Robots Co., Ltd. не несет ответственности за убытки пользователей, вызванные следующими причинами:
Форс-мажорные обстоятельства (например, стихийные бедствия, пожары, войны и т. д.);
Естественные повреждения или износ роботизированной системы;
Условия эксплуатации на объекте (например, напряжение, температура, влажность и т. д.) или внешние факторы (например, внешние помехи и т. д.) не соответствуют заданным требованиям к окружающей среде для нормальной работы;
Роботизированная система установлена неправильно (в том числе неправильно установлена после перемещения);
Вследствие умышленного или небрежного использования Пользователем или третьим лицом, неправильного использования (включая неиспользование Пользователем в соответствии с настоящим руководством пользователя и/или другими требованиями компании DUCO Robots Co., Ltd.) или саботажа.
Если не оговорено иное, компания DUCO Robots Co., Ltd. не несет ответственности за косвенные, специальные или случайные убытки, вызванные использованием роботизированной системы, включая, помимо прочего, потерю дохода, потерю фактической или ожидаемой прибыли, потерю бизнеса, потерю возможностей, потерю деловой репутации, потерю данных, ущерб или раскрытие информации.
Оценка рисков#
Оценка рисков - одна из важнейших задач, которую должен решать интегратор. Сам робот - это частично завершенная машина, и безопасность установки робота зависит от того, как он интегрирован (например, с инструментами, препятствиями и другими механизмами).
Рекомендуется, чтобы интегратор проводил оценку рисков в соответствии с положениями международных стандартов ISO 12100, ISO 10218-2, ISO/TS 15066 (или соответствующих национальных стандартов, например, китайских GB 15706, GB 11291.2, GB/T 36008). Специалисты по интеграции, выполняющие оценку рисков, должны учитывать все рабочие процедуры в течение всего срока эксплуатации робота, включая, но не ограничиваясь:
Обучайте роботов при разработке робототехнических установок;
Диагностика неисправностей и техническое обслуживание;
Нормальная работа роботизированной установки.
Оценка рисков должна быть проведена до первого включения робота в сеть. Частью оценки рисков, выполняемой интегратором, является определение правильных настроек конфигурации безопасности и определение необходимости дополнительных кнопок аварийного останова и других защитных мер.
Ниже перечислены основные риски, которые должны учитывать интеграторы. Обратите внимание, что с конкретным роботизированным устройством могут быть связаны и другие существенные риски.
Палец находится между шарниром 4 и шарниром 5 робота;
Острые края и острия инструментов или соединительных элементов прокалывают кожу;
Острые края и острые точки на препятствиях вблизи траектории движения робота прокалывают кожу;
Растяжения или переломы в результате столкновения полезной нагрузки робота с твердой поверхностью;
Последствия ослабления болтов, используемых для крепления робота или инструмента;
Предметы падают с инструмента (например, из-за неправильного зажима или отключения питания);
Ошибки в работе из-за разных кнопок аварийной остановки на разных машинах.
Если робот устанавливается в не совместных приложениях, где риск не может быть адекватно устранен с помощью его внутренних функций безопасности (например, использование опасных инструментов), системный интегратор должен установить дополнительную защиту на основе оценки риска (например, использование защитных устройств, которые могут защитить интегратора во время установки и программирования). Компания DUCO ROBOTS Co., Ltd. не несет ответственности за ущерб, вызванный неустановкой защитных устройств.
Безопасная эксплуатация#
Аварийная остановка#
Аварийная остановка - это состояние, которое имеет приоритет над всеми другими операциями управления роботом и приводит к остановке всех контролируемых опасных объектов, отключает питание двигателя от привода робота, остается активным до сброса и может быть восстановлено только вручную.
Состояние аварийной остановки означает, что система питания отключена и робот не может двигаться. Пользователь должен выполнить действия по возврату, то есть сбросить кнопку аварийной остановки и нажать кнопку «Power on» на обучающем кулоне, чтобы возобновить нормальную работу. Аварийная остановка не может использоваться в качестве меры по снижению риска, но может быть использована в качестве вторичного средства защиты.
Аварийный останов не должен использоваться для обычной остановки программы, так как это может привести к дополнительному ненужному износу робота.
Функции, связанные с безопасностью#
Функция безопасности Введение#
Для подключения других роботов и дополнительных защитных устройств роботы серии GCR оснащены различными внутренними функциями безопасности, аварийным электрическим интерфейсом безопасности I/O, а также цифровыми и аналоговыми сигналами управления.
Осторожно
Использование и настройка функций безопасности и интерфейсов должны соответствовать процедурам оценки рисков для каждого применения робота.
Если робот обнаружит неисправность или нарушение в системе безопасности (например, если один из проводов в цепи аварийного останова оборван или нарушен защитный зажим), то будет инициирован останов категории 0.
Время остановки должно быть учтено при оценке риска применения.
Предупреждение
Использование параметров конфигурации безопасности, отличных от тех, которые были определены в результате оценки риска, может привести к тому, что опасности не будут разумно устранены или риски не будут достаточно снижены.
Убедитесь, что инструменты и захваты подключены надлежащим образом, чтобы в случае прекращения подачи электроэнергии не возникло опасности.
Концевой эффектор не защищен системой безопасности GCR. Концевой эффектор и соединительный кабель не контролируются.
Категории безопасных остановок#
В зависимости от ситуации робот может активировать три категории остановок, определенные в соответствии с IEC 60204-1. Эти категории определены в таблице ниже.
0(SS0)
Немедленно отключить питание робота
1(SS1)
Немедленно снизить скорость каждого сочленения до 0 с самым быстрым ускорением, поднять шлюз после того, как сочленение остановится, и отключить питание робота.
2(SS2)
Робот замедляется до останова, сохраняя траекторию. После остановки все сочленения остаются во включенном состоянии, а тормоз не перемещается.
Переключение между категориями остановок:
При остановке по категории 1 одновременно срабатывает таймер. Если через 500 мс робот превысит заданную безопасную скорость, он перейдет в режим остановки по категории 0.
Особенности безопасности#
Функции безопасности коллаборативного робота DUCO, перечисленные в таблице ниже, находятся в роботе и предназначены для управления робототехнической системой, т. е. роботом и подключенными инструментами/конечными эффекторами. Функция безопасности робота используется для снижения риска для робототехнической системы, определенного в результате оценки риска.
Аварийная остановка (ES)
Выполнение SS1
Защитная остановка
Выполнение SS2
Безопасная остановка работы (SOS)
После выполнения ss2 будет запущен мониторинг SOS для отслеживания текущего отклонения положения робота, и SS0 будет запущен, если оно будет нарушено
Безопасное ограниченное положение сочленения (SLP)
Согласно настройке порогового значения, SS2 срабатывает, когда положение сочленения достигает порогового значения. Если срабатывает ограничение сочленения, ss0 напрямую срабатывает.
Безопасная ограниченная скорость сочленения (SLS)
Согласно настройке порогового значения, SS2 срабатывает, когда скорость сочленения достигает порогового значения. Если срабатывает ограничение скорости сочленения, ss0 напрямую срабатывает.
Ограничение положения TCP
Можно установить плоскость безопасности для ограничения рабочей зоны робота, которая устанавливается в соответствии с пороговым значением. При достижении порогового значения срабатывает SS2. Если срабатывает плоскость безопасности, контроллер безопасности напрямую срабатывает ss0. Разрешено максимум шесть плоскостей безопасности и три системы координат TCP.
Ограничение скорости TCP
В соответствии с настройкой порога срабатывает SS2 при достижении порога. Если срабатывает ограничение скорости TCP, контроллер безопасности напрямую срабатывает ss0.
Ограничение положения локтя
В соответствии с настройкой порога срабатывает SS2 при достижении порога. Если срабатывает ограничение положения локтя, контроллер безопасности напрямую срабатывает ss0.
Ограничение скорости локтя
В соответствии с настройкой порога срабатывает SS2 при достижении порога. Если срабатывает ограничение скорости локтя, контроллер безопасности напрямую срабатывает ss0.
Ограничение силы соединения
В соответствии с настройкой порога срабатывает SS2 при достижении порога. Если срабатывает ограничение крутящего момента сочленения, контроллер безопасности напрямую запускает ss0.
Ограничение усилия TCP
Согласно настройке порогового значения, SS2 срабатывает при достижении порогового значения. Если срабатывает ограничение конечного усилия, контроллер безопасности напрямую запускает ss0.
Ограничение усилия локтя
Согласно настройке порогового значения, SS2 срабатывает при достижении порогового значения. Если срабатывает ограничение усилия локтя, контроллер безопасности напрямую запускает ss0.
Ограничение мощности
Согласно настройке порогового значения, SS2 срабатывает при достижении порогового значения. Если срабатывает ограничение мощности, контроллер безопасности напрямую запускает ss0.
Вход переключения режима
Если физический вход отключен, вы можете переключаться через пользовательский интерфейс. Но не оба одновременно. SS2 срабатывает при изменении режима. Если сценарий приостановлен, сценарий может продолжать работать.
Включить вход устройства
Вы можете выбрать, включать ли этот вход. Этот вход действителен только в ручном режиме, а не в автоматическом. Нарушение активирует SS2.
Вход защитной остановки
Если этот параметр действителен во всех режимах, срабатывает SS2. Если вход сброса защиты безопасности не активирован, он автоматически сбрасывается после исчезновения сигнала. В противном случае вход сброса должен быть активирован до того, как сброс может быть выполнен.
Вход сброса защитной остановки
Вы можете выбрать, сбрасывать ли вход сигнала. Если сброс защиты безопасности активирован, когда срабатывающая защита безопасности останавливается и сигнал запуска исчезает, требуется вход сигнала канала, прежде чем движение может быть продолжено. Нарастающий фронт действителен, и высокий уровень должен поддерживаться в течение 500 мс.
Вход автоматической защитной остановки
Этот параметр действителен только в автоматическом режиме. Срабатывает SS2. После исчезновения сигнала безопасный режим возвращается в норму.
Автоматический вход сброса защитного останова
Аналогично входу сброса защитного останова, он действителен только для защитного останова, срабатывающего с помощью автоматического защитного останова.
Выход аварийной остановки системы
Этот сигнал генерируется только при срабатывании системы с помощью аварийной остановки защитного останова
Выход защитной остановки
Этот сигнал выводится, когда вход защитной остановки срабатывает автоматический защитный останов.
Выход автоматической остановки защиты
Этот сигнал будет выведен только при остановке защиты в автоматическом режиме.
Режим понижения
Срабатывает режим понижения, и используются параметры, связанные с режимом понижения.
Выход режима понижения
Сигнал может выводиться глобально.
Режим восстановления
При превышении предела соединения или предела TCP необходимо перезапустить систему, чтобы войти в режим восстановления. Режим восстановления ограничивает скорость соединения не более 30 градусов/с, а конечную скорость не более 250 мм/с.
Интерфейсы безопасного ввода-вывода#
Интерфейс безопасности IO - это внешний интерфейс SCram и вход и выход безопасности, предоставляемый шкафом управления, включающий 1 вход сигнала SCram (пассивный сигнал), 1 выход обратной связи SCram (активный сигнал), 1 вход защитного останова (пассивный сигнал), 2 конфигурируемых входа безопасности (пассивный сигнал) и 2 конфигурируемых выхода безопасности (активный сигнал). Среди них вход сигнала scram, вход защитного останова и конфигурируемый вход безопасности действительны для электроники высокого уровня, а эффективный уровень составляет 11В-30В постоянного тока; кроме того, при использовании конфигурируемого выхода безопасности и выхода обратной связи scram необходимо подключить реле для переключения.
Конфигурируемые входы безопасности могут быть настроены как: вход сброса защиты, вход автоматического режима остановки защиты, вход автоматического режима сброса защиты, вход режима уменьшения. Конфигурируемые выходы безопасности могут быть настроены как: выход сброса защиты, выход автоматического режима остановки защиты, выход режима уменьшения. Интерфейс определяется следующим образом:
Определение интерфейса безопасного ввода/вывода

ID |
Определение сигнала |
ID |
Определение сигнала |
|---|---|---|---|
1 |
EI1+ (аварийный вход системы 1+) |
2 |
EI1- (аварийный вход системы 1-) |
3 |
EI2+ (аварийный вход системы 2+) |
4 |
EI2- (аварийный вход системы 2-) |
5 |
PS1+ (вход защитного останова 1+) |
6 |
PS1- (вход защитного останова 1-) |
7 |
PS2+ (вход защитного останова 2+) |
8 |
PS2- (вход защитного останова 2-) |
9 |
CI1_1+ Конфигурируемый вход безопасности 1 (1+)] |
10 |
CI1_1- [Конфигурируемый вход безопасности 1 (1-)] |
11 |
CI1_2+ [Конфигурируемый вход безопасности 1 (2+)] |
12 |
CI1_2- [Конфигурируемый вход безопасности 1 (2-)] |
13 |
CI2_1+ [Конфигурируемый вход безопасности 2 (1+)] |
14 |
CI2_1- [Конфигурируемый вход безопасности 2 (1-)] |
15 |
CI2_2+ Конфигурируемый вход безопасности 2 (2+)] |
16 |
CI2_2- [Конфигурируемый вход безопасности 2 (2-)]] |
17 |
EI1+ (Аварийный выход системы 1+) |
18 |
EI1- (Аварийный выход системы 1-) |
19 |
EI2+ (Системный аварийный выход 2+) |
20 |
EI2- (Системный аварийный выход 2-) |
21 |
CO1_1+[Конфигурируемый выход безопасности 1 (1+)] |
22 |
CO1_1-[Конфигурируемый выход безопасности 1 (1-)] |
23 |
CO1_2+[Конфигурируемый выход безопасности 1 (2+)] |
24 |
CO1_2-[Конфигурируемый выход безопасности 1 (2-)] |
25 |
CO2_1+[Конфигурируемый выход безопасности 2 (1+)] |
26 |
CO2_1-[Конфигурируемый выход безопасности 2 (1-)] |
27 |
CO2_2+[Конфигурируемый выход безопасности 2 (2+)] |
28 |
CO2_2-[Конфигурируемый выход безопасности 2 (2-)] |
Опасность травмирования и столкновения с зажимом#
Во время работы робота существуют «слепые зоны» в функции обнаружения столкновений, поэтому пользователи должны обращать внимание на риск отказа системы обнаружения столкновений или травмы от зажима в особых условиях работы. Ниже описаны три типичных рабочих условия.
Условие работы 1: Когда конечное положение робота удалено от центра основания робота более чем на 1000 мм, если робот движется в направлении красной стрелки, как показано на ФИГ. 2.6.1 и ФИГ. 2.6.2, робот менее чувствителен к внешним силам в направлении движения и более подвержен риску травмы при зажиме. Когда робот движется в направлении зеленой стрелки, как показано на ФИГ. 2.6.1 и ФИГ. 2.6.2, при столкновении с внешней средой он будет чувствителен к внешней силе, вызванной столкновением.
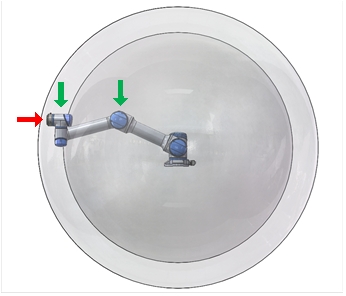
РИС. 2.6.1 Вид спереди робота в рабочем состоянии
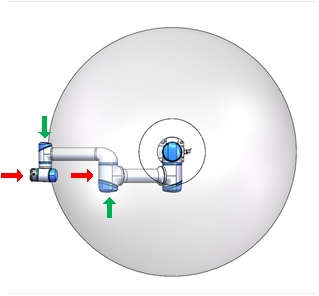
РИС. 2.6.2 Вид сверху на робота в рабочем состоянии
Условие работы 2: При направлении Z базы робота в качестве центра и радиусе около 350 мм, если точка контакта находится в этом диапазоне и направление силы контакта перпендикулярно плоскости, в которой расположен шатун сустава 2 и сустава 3, функции обнаружения столкновения трудно обнаружить столкновение между роботом и внешним миром. На рисунках 2.6.3 и 2.6.4 показаны красные стрелки; В это время, если направление контактной силы между роботом и внешним миром более соответствует направлению базовой метки Z, робот более чувствителен к внешней силе, возникающей при столкновении, как показано зеленой стрелкой на рисунке 2.6.3.
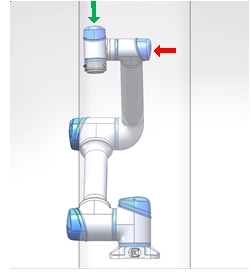
Рисунок 2.6.3 Вид спереди в рабочем состоянии 2
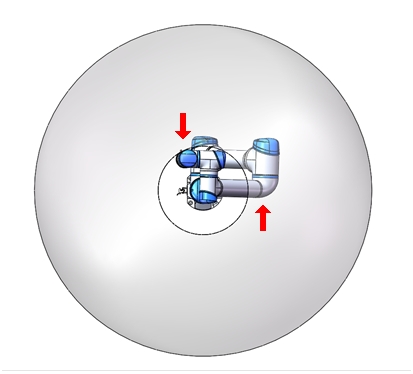
РИС. 2.6.4 Вид сверху в рабочем состоянии 2
Рабочее условие 3: Независимо от того, в какой позе и состоянии движения находится робот, при столкновении с внешним миром, если точка столкновения сосредоточена в начале базового положения робота и радиус составляет около 350 мм, роботу трудно обнаружить такое столкновение, и существует большая вероятность получения травмы соска, как показано красной стрелкой на ФИГ. 2.6.5 и ФИГ. 2.6.6. Когда точка столкновения находится за пределами диапазона и не соответствует условиям обнаружения слепой зоны столкновения, описанным в рабочих условиях 1 и 2, роботу легче обнаружить столкновение с внешним миром, как показано зеленой стрелкой на рис. 2.6.5 и рис. 2.6.6.
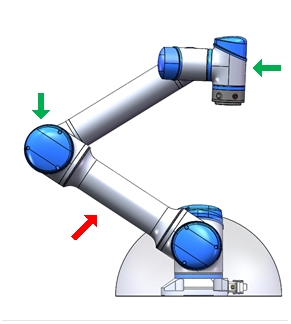
РИС. 2.6.5 Вид с трех сторон на условия труда
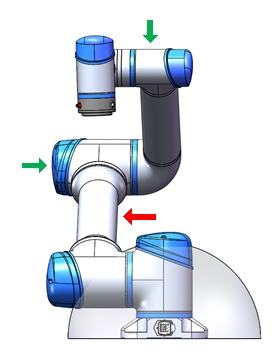
Рисунок 2.6.6 Три положительных мнения об условиях труда
Для всех описанных выше условий работы, если робот движется в направлении, не чувствительном к обнаружению внешних столкновений, скорость движения в этот момент должна быть максимально снижена, учитывая необходимость ограничения совместных усилий робота с внешним миром.
Если авария произошла, то для уменьшения ущерба, причиненного аварией, можно использовать ручное отключение функции удерживающего тормоза.
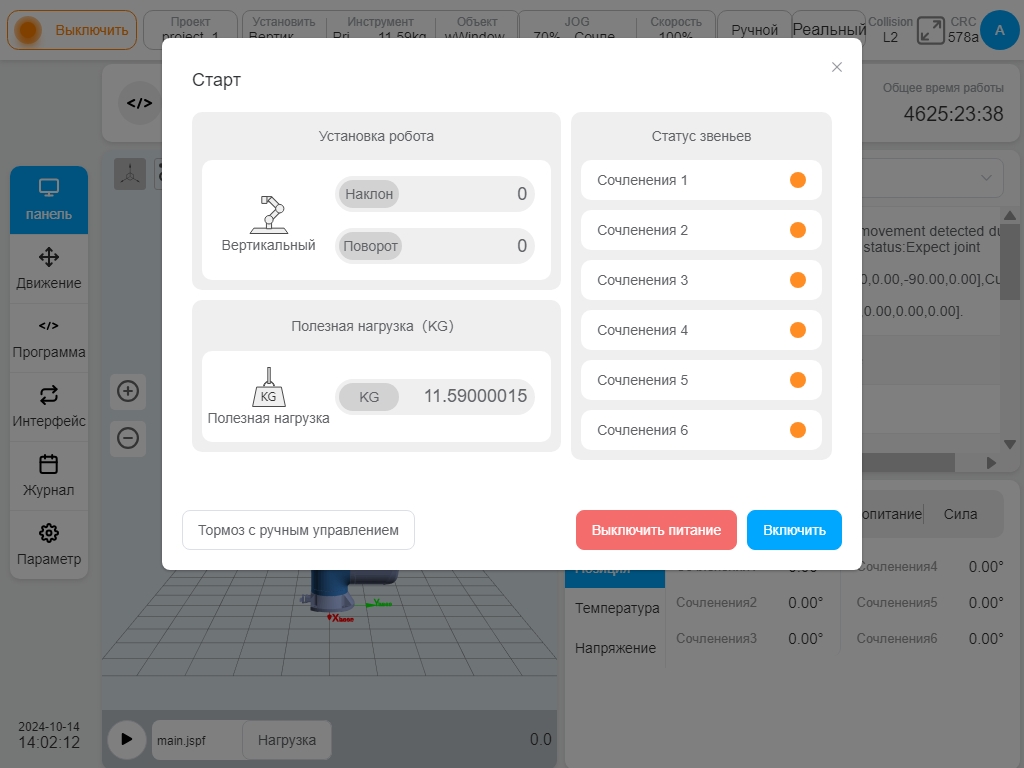
Когда робот включен, но не активирован, вы можете запустить функцию «Manual Release Brake Function» в левом нижнем углу интерфейса. После нажатия кнопки «Manual Release Brake» интерфейс переключится, как показано на рисунке ниже:
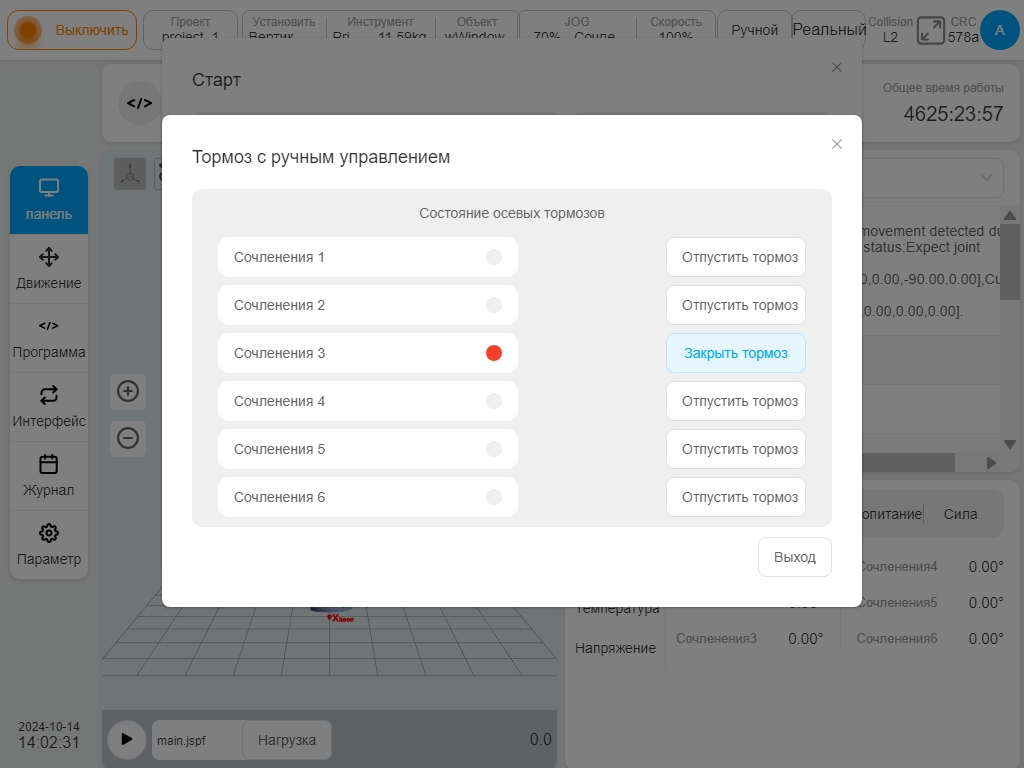
При нажатии на кнопку «Отпустить тормоз» тормоз соответствующего шарнира может быть отпущен, что позволяет приводить шарнир в движение без питания. Красный индикатор в левой части интерфейса служит для отображения состояния удерживающего тормоза. Нажатие на кнопку «Close Brake» (Закрыть тормоз) закрывает тормоз соответствующего шарнира.
Риск превышения скорости роботами сингулярности#
Робот автоматически замедлится при планировании движения (по прямой, дуге и т. д., исключая движение суставов) вблизи сингулярности, а при обучении должен избегать сингулярности или проходить ее с помощью движения суставов. В конфигурации серии GCR имеются точки плеча, точки локтя и точки запястья.
Плечо сингулярности#
Когда центр лучезапястного сустава O6 расположен на оси J1 сустава 1, возникает сингулярность плеча, что приводит к отсутствию решения для сустава 1. Эффект сингулярности также возникает, когда O6 расположен очень близко к J1, при этом перемещение конца может привести к перегрузке сустава 1. На рисунке ниже показана сингулярная поза рядом с позой.
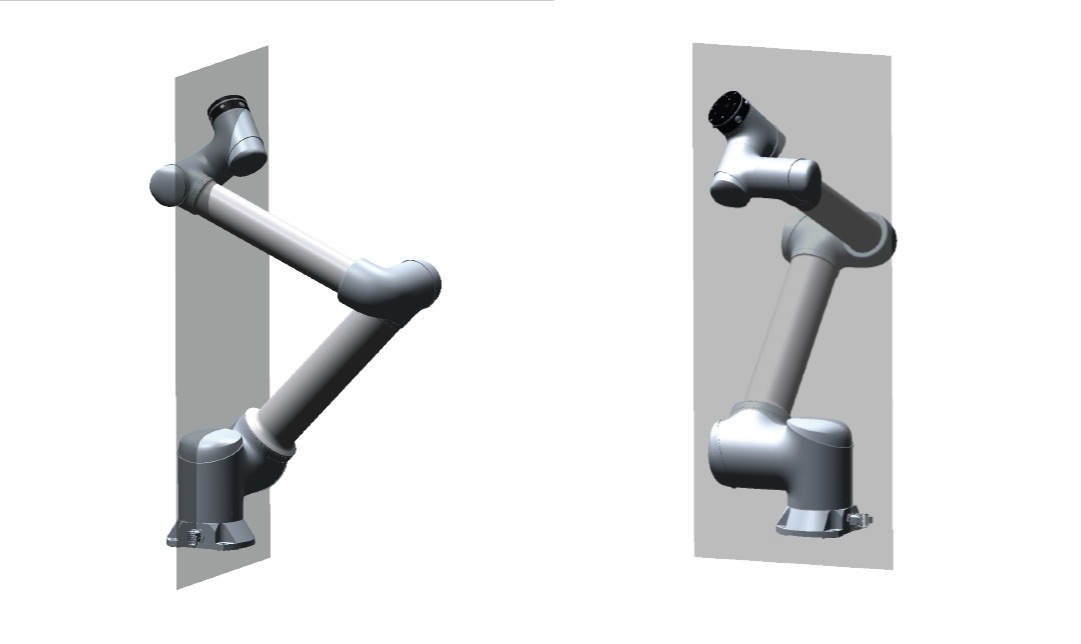
Рисунок 2.7.1 Эталонная поза с сингулярностью плеча
Локтевая сингулярность#
Когда оси сустава 2, сустава 3 и сустава 4 соответственно обозначены как J2, J3 и J4, они компланарны, что не приводит к решению для сустава 2. Просто, когда сустав 3 находится в почти сингулярной позе, близкой к 0 градусов, перемещение конца может привести сустав 2, сустав 3 и сустав 4 к перегрузке. На рисунке ниже показана сингулярная поза вблизи локтя:
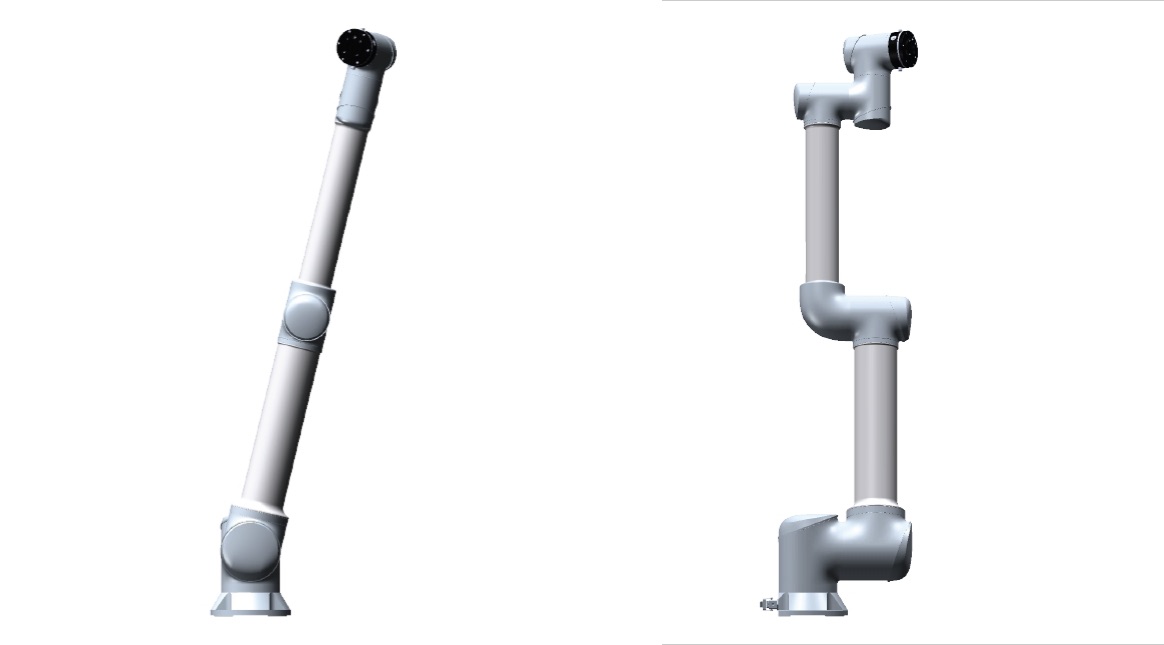
Рисунок 2.7.2 Эталонная поза с сингулярностью локтя
Сингулярность запястья#
Когда сустав 5 находится под углом 0 градусов, сустав 6 не принимает решения, что приводит к сингулярности запястья. Когда сустав 5 близок к 0 градусов, что приводит к сингулярной позе в районе запястья, а перемещение конца может привести к перегрузке сустава 4, сустава 5 и сустава 6. Обратитесь к следующему рисунку:
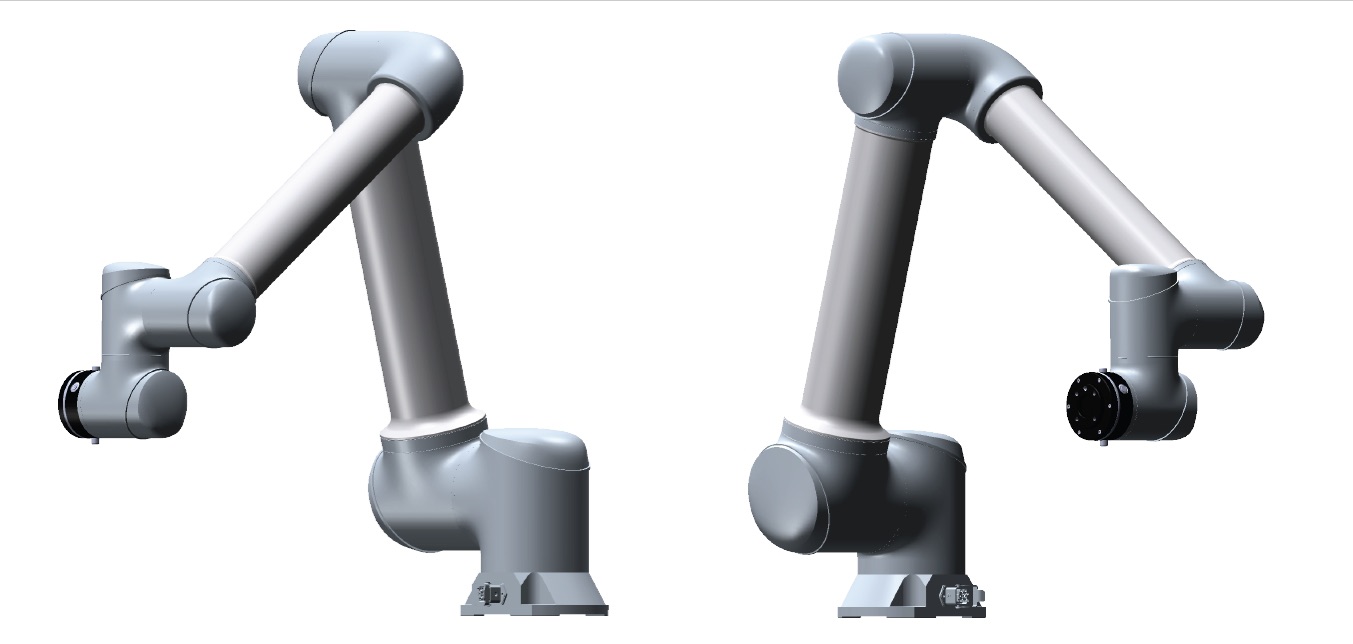
Рисунок 2.7.3 Эталонная поза с сингулярностью запястья
Когда робот движется к сингулярной точке или вблизи нее, как показано на рисунке выше, запланированное движение на основе декартовых координат не может быть обратно пропорционально решено для совместного движения каждой оси, и планирование движения не может быть выполнено правильно. Поэтому можно использовать команду движения узла или команду движения movej.
Осторожно
Избегайте использования таких команд, как прямые линии, дуги и перемещение концов в направлениях X, Y, Z, RX, RY и RZ вблизи точек сингулярности. Робот рискует заглохнуть.
Траектории с единичными рисками должны быть полностью оценены перед запуском.