ROS robot development Kit Instructions#
System Requirements#
System software: Ubuntu 18.04.1
ROS version: Melodic
Robot controller program V2.7 and above
Download and decompress the installation package#
Step 1: Load the ROS environment Settings file
Open a terminal input source/opt/ros/melodic/setup. The bash
Step 2: Create and initialize the working directory
mkdir -p ~/duco_ws/src
cd ~/duco_ws/src
catkin_init_workspace
Step 3: Compile the working directory
cd ~/duco_ws/
catkin_make
Step 4: Download the ROS secondary development kit and unzip it
Copy the resulting source code to the specified /duco_ws/src.
Specific code directory structure:
- duco_ws
--src
--CMakeLists.txt
--duco_controller
--duco_demo
--duco_driver
--duco_gcr5_moveit_config
--duco_gcr5_moveit_config
--duco_gcr5_moveit_config
--duco_gcr5_moveit_config
--duco_gcr5_moveit_config
--duco_gcr5_moveit_config
--duco_msgs
--duco_support
Step 5: Compile the ROS secondary development kit
Open the terminal and enter the following commands in sequence
cd ~/duco_ws
source ./devel/setup.bash
catkin_make
Step 6: Start the script control robot
Verify that the current DucoCore controller is started
Open the terminal and enter the following command:
cd ~/duco_ws
source ./devel/setup.bash
roslaunch duco_gcr5_moveit_config moveit_planning_execution.launch robot_ip:=< controller IP>
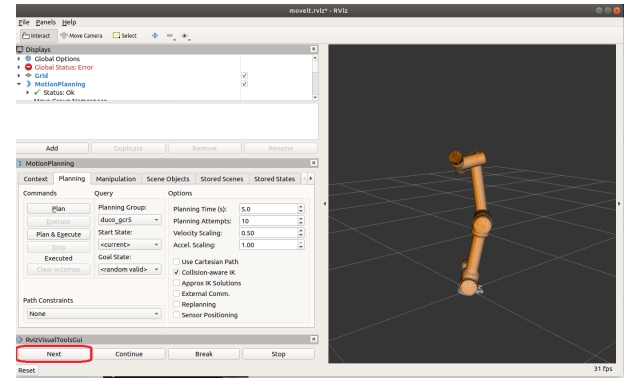
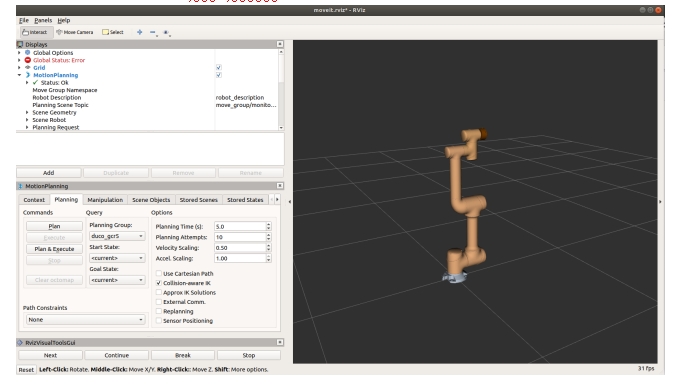
Wait for a moment to launch the rviz+moveit interface, as shown in the figure below.
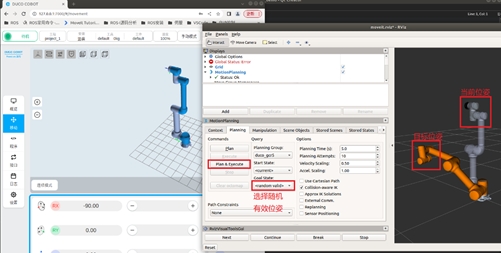
You can set the Goal State to a random valid pose and confirm that the pose is safety,
Click the Plan & Execute button.
The path can be planned and robot can be controlled for corresponding movements.
duco_demo Use#
duco_demo contains the gcr5_demo node, which mainly controls the robot through the interface provided by MoveGroup. For users who have some C++ programming foundation and are familiar with robot, the sample program can be modified to achieve their desired functions.
Step 1: Open terminal input
rosrun duco_demo gcr5_demo
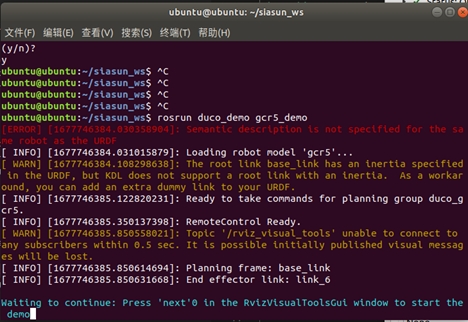
Step 2: Click next in the RVIZ window to control the robot.