Function package compilation and basic configuration#
Cloning the DUCO Resource Package#
Clone the DUCO src resource package locally, then navigate to the target directory. The main files include the duco_msg, duco_arm, duco_support, and duco_ros_driver packages for the Duco robotic system.
There are two methods to configure the robotic arm. We’ll introduce the first method in this section, while the second method will be covered in the next chapter.
Building the duco Package#
First, navigate to the duco_ros2_driver directory and run the following commands:
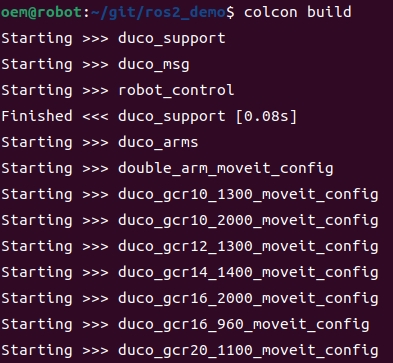
Step 1: Compile core packages step-by-step (msg/support/arms/driver)
1colcon build --packages-select duco_msg 2colcon build --packages-select duco_support 3colcon build --packages-select duco_arms 4colcon build --packages-select duco_ros_driver 5colcon build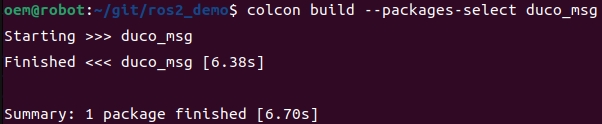



Step 2: Load resources
1source install/setup.bash 2colcon build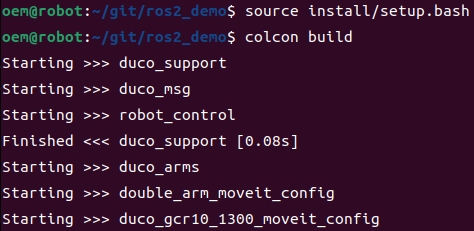
Step 3: Modify interface address
Navigate to: src folder / used gcr folder / launch folder / demo.launch.py
Locate:
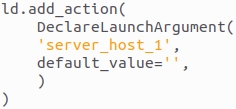
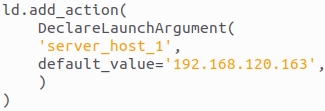
Modify the default_value to the domain address in use.
Step 4: Launch the required MoveIt configuration package:
Using duco_gcr5_910_moveit_config as an example.
Can be replaced with other files, such as duco_gcr3_618_moveit_config.
1source install/setup.bash 2ros2 launch duco_gcr5_910_moveit_config demo.launch.py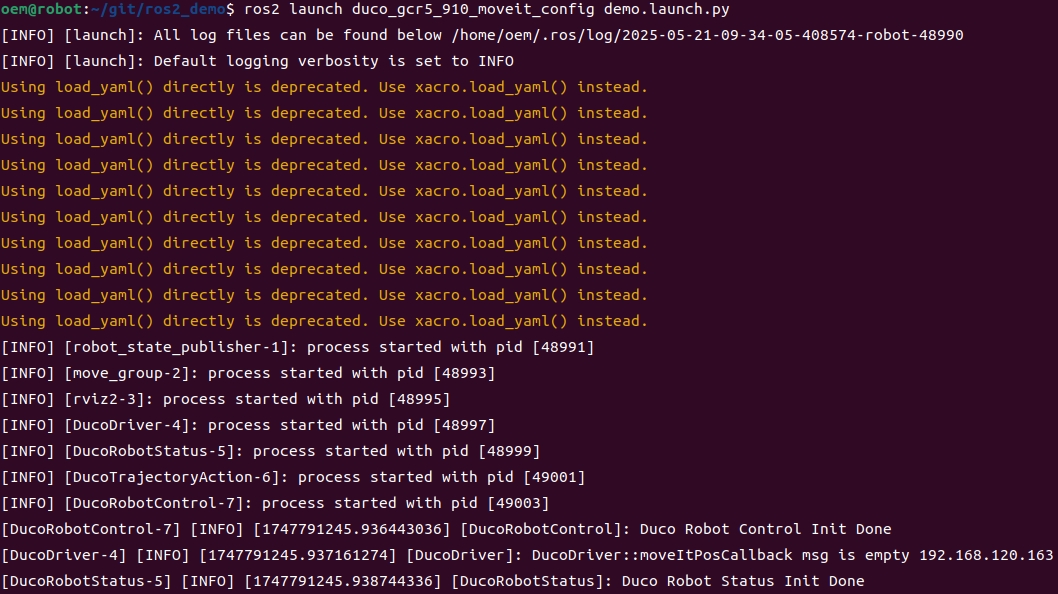
Checking Connection Status#
Step 5: Check connection
Open a new terminal in the same directory, initialize and check nodes:
1source install/setup.bash 2ros2 service list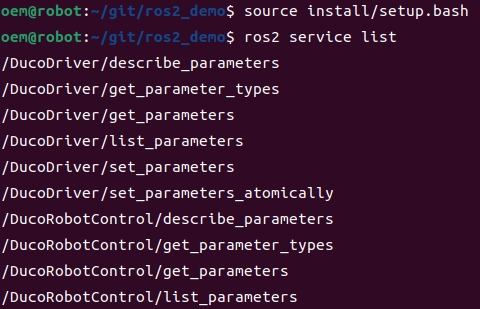
- Step 6:
Verify if the following nodes exist: