Instruction control of the mechanical arm and related interface call instructions#
Method 2: Controlling the Robotic Arm via Terminal Commands#
We can use RobotControl, RobotIoControl, and RobotMove commands to control the robotic arm’s power enablement, input/output, and movement respectively.
Important Notes:
All commands require a space after the colon ‘:’
Command parameters can be found in the relevant srv files under src/duco_msg/srv
Before using commands, complete the configuration process and package compilation described in previous chapters.
After preparing your environment, navigate to the src resource package directory, open a terminal, and execute commands.
Below are detailed explanations of available commands:
RobotControl#
Controls power and enablement state of the robotic system.
Input Parameters:
string command: Instruction
int8 arm_num: Arm number (set to 0)
bool block: Blocking instruction (false = non-blocking command that returns immediately)
string response: Return message (string)
Available Commands:
poweron (Power on)
enable (Enable movement)
disable (Disable movement)
poweroff (Power off)
Command Template:
1ros2 service call /duco_robot/robot_control duco_msg/srv/RobotControl "{command: '', arm_num: , block: }"
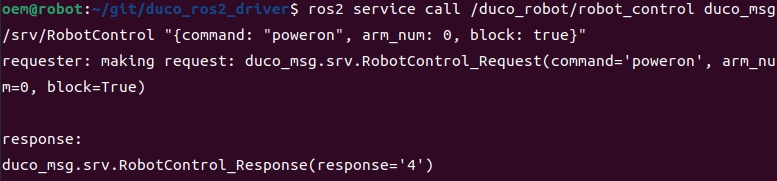
Command Example:
1ros2 service call /duco_robot/robot_control duco_msg/srv/RobotControl "{command: 'poweron', arm_num: 0, block: true}"
RobotIoControl#
Configures and retrieves general purpose I/O.
Input Parameters:
string command: Instruction
int8 arm_num: Arm number (set to 0)
int8 type: I/O type (0 = general I/O, 1 = tool I/O)
int8 port: I/O port (GEN I/O range 1-16, TOOL I/O range 0-1)
bool value: SetIO value
bool block: Blocking instruction (false = non-blocking)
string response: Return message (string)
Available Commands:
setIo (Configure output)
getIo (Retrieve input)
Command Template:
1ros2 service call /duco_robot/robot_io_control duco_msg/srv/RobotIoControl "{command: '', arm_num: , type: , port: , value: , block: }"
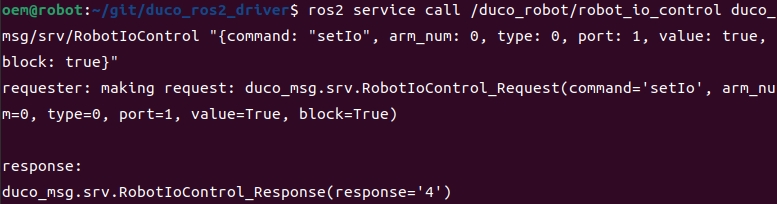
Command Example:
1ros2 service call /duco_robot/robot_io_control duco_msg/srv/RobotIoControl "{command: 'setIo', arm_num: 0, type: 0, port: 1, value: true, block: true}"
RobotMove#
Controls robotic arm movement.
Input Parameters:
string command: Instruction
int8 arm_num: Arm number (set to 0)
float32[] p: Cartesian target position (x,y,z,rx,ry,rz)
float32[] q: Target joint angles in radians
float32 v: Max end-effector linear velocity (range: 0.01-5 m/s)
float32 a: Max end-effector linear acceleration (range: 0.01-∞ m/s²)
float32 r: Trajectory blend radius (meters, 0 = no blending)
string tool: Tool name (“default”)
string wobj: Workobject coordinate system (“default”)
bool block: Blocking instruction
string response: Return message (string)
Available Commands:
movej: Joint space move to target joint angles
movej2: Synchronized phase move to target joint angles
movejpose: Joint space move to target end-effector position
movejpose2: Synchronized phase move to target end-effector position
movel: Linear Cartesian move to target pose
movetcp: Linear incremental move in tool coordinate system
Command Template:
1ros2 service call /duco_robot/robot_move duco_msg/srv/RobotMove "{command: '', arm_num: , v: , a: , r: , tool: '', wobj: '', block: , q: [,,,,,], p: [,,,,,]}"
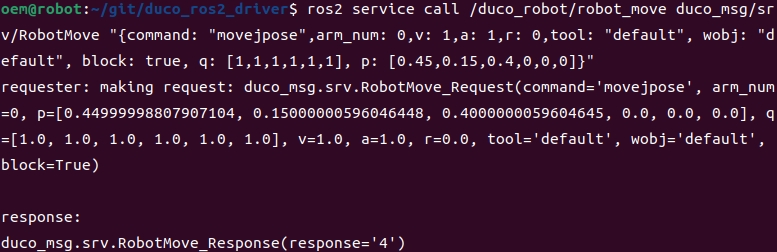
Command Example:
1ros2 service call /duco_robot/robot_move duco_msg/srv/RobotMove "{command: 'movejpose', arm_num: 0, v: 1, a: 1, r: 0, tool: 'default', wobj: 'default', block: true, q: [1,1,1,1,1,1], p: [0.49,0.14,0.44,-1.14,0,-1.57]}"
API Documentation#
RobotControl#
1/**
2 * @brief: Robot power on;
3 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
4 * @return: Blocking execution returns the task end status, non-blocking execution returns the task ID;
5 */
6int32_t power_on(bool block)
7// Example:
8power_on(true)
9
10/**
11 * @brief: Robot power off;
12 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
13 * @return: Blocking execution returns the task end status, non-blocking execution returns the task ID;
14 */
15int32_t power_off(bool block)
16// Example:
17power_off(true)
18
19/**
20 * @brief: Robot enable;
21 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
22 * @return: Blocking execution returns the task end status, non-blocking execution returns the task ID;
23 */
24int32_t enable(bool block) ;
25// Example:
26enable(true)
27
28/**
29 * @brief: Robot disable;
30 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
31 * @return: Blocking execution returns the task end status, non-blocking execution returns the task ID;
32 */
33int32_t disable(bool block) ;
34// Example:
35disable(true)
RobotIoControl#
1 /**
2 * @brief: Read the high/low level of the robot end-effector's digital input port. Returns true for high level, false for low level;
3 * @param num: End-effector digital input port number, range 1-2;
4 * @return: true for high level, false for low level;
5 */
6bool get_tool_digital_in(int16_t num) ;
7// Example:
8get_tool_digital_in(1)
9
10/**
11 * @brief: Read the high/low level of the control cabinet's user digital input port. Returns true for high level, false for low level;
12 * @param num: Control cabinet input port number, range 1-16;
13 * @return: true for high level, false for low level;
14 */
15bool get_standard_digital_in(int16_t num) ;
16// Example:
17get_standard_digital_in(1)
18
19 /**
20 * @brief: Set end-effector digital output;
21 * @param num: End-effector digital output port number, range 1-2;
22 * @param value: true for high level, false for low level;
23 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
24 * @return: Blocking execution returns the task end status, non-blocking execution returns the task ID;
25 */
26int32_t set_tool_digital_out(int16_t num, bool value, bool block) ;
27// Example:
28set_tool_digital_out(1, true, true)
29
30/**
31 * @brief: Control the high/low level of the control cabinet's digital output port;
32 * @param num: Control cabinet output port number, range 1-16;
33 * @param value: true for high level, false for low level;
34 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
35 * @return: Blocking execution returns the task end status, non-blocking execution returns the task ID;
36 */
37int32_t set_standard_digital_out(int16_t num, bool value, bool block) ;
38// Example:
39set_standard_digital_out(1, true, true)
RobotMove#
1 /**
2 * @brief: Move robot from current state to target joint angles via joint motion;
3 * @param: joints_list Target joint angles for joints 1-6, unit: rad;
4 * @param v: Joint angular velocity, unit: percentage of system set speed %, range (0,100];
5 * @param a: Joint angular acceleration, unit: percentage of system set acceleration %, range (0,100];
6 * @param: r: Blend radius, unit: percentage of maximum system blend radius %, default 0 (no blending), range [0,50);
7 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
8 * @param op: Optional parameter;
9 * @param def_acc: Whether to use system default acceleration. false uses custom acceleration, true uses system auto-planned acceleration. Optional, default false;
10 * @return: Blocking execution: returns task end status (Finished if no blending, Interrupt if blended);
11 * Non-blocking execution: returns task ID for querying execution status via get_noneblock_taskstate(id);
12 */
13int32_t movej(const std::vector<double> & joints_list, double v, double a, double r, bool block, const OP &op = _op, bool def_acc = false) ;
14// Example:
15movej([1,1,1,1,1,1], 1, 1, 0, true)
16
17/**
18 * @brief: Move robot from current state to target joint angles via joint motion;
19 * @param: joints_list Target joint angles for joints 1-6, unit: rad;
20 * @param v: Joint angular velocity, range [0.01*PI/180, 1.25*PI], unit: rad/s;
21 * @param a: Joint angular acceleration, range [0.01*PI/180, 12.5*PI], unit: rad/s²;
22 * @param r: Blend radius, unit: m, default 0 (no blending). Value >0 indicates blending with next motion;
23 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
24 * @param op: Optional parameter;
25 * @param def_acc: Whether to use system default acceleration. false uses custom acceleration, true uses system auto-planned acceleration. Optional, default false;
26 * @return: Blocking execution: returns task end status (Finished if no blending, Interrupt if blended);
27 * Non-blocking execution: returns task ID for querying execution status via get_noneblock_taskstate(id);
28 */
29int32_t movej2(const std::vector<double> & joints_list, double v, double a, double r, bool block, const OP &op = _op, bool def_acc = false) ;
30// Example:
31movej2([1,1,1,1,1,1], 1, 1, 0, true)
32
33 /**
34 * @brief: Move robot via joint motion to target end-effector pose;
35 * @param p: Target end-effector pose, position unit: m, orientation as Rx,Ry,Rz in rad;
36 * @param v: Joint angular velocity, unit: percentage of system set speed %, range (0,100];
37 * @param a: Joint acceleration, unit: percentage of system set acceleration %, range (0,100];
38 * @param r: Blend radius, unit: percentage of maximum system blend radius %, default 0 (no blending), range [0,50);
39 * @param q_near: Nearby joint angles for inverse kinematics solution. Uses current position if empty;
40 * @param tool: Tool coordinate system to use. Defaults to current tool if empty;
41 * @param wobj: Workpiece coordinate system to use. Defaults to current wobj if empty;
42 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
43 * @param op: Optional parameter;
44 * @param def_acc: Whether to use system default acceleration. false uses custom acceleration, true uses system auto-planned acceleration. Optional, default false;
45 * @return: Blocking execution: returns task end status (Finished if no blending, Interrupt if blended);
46 * Non-blocking execution: returns task ID for querying execution status via get_noneblock_taskstate(id);
47 */
48int32_t movej_pose(const std::vector<double> & p, double v, double a, double r, const std::vector<double> & q_near, const std::string& tool, const std::string& wobj, bool block, const OP &op = _op, bool def_acc = false) ;
49// Example:
50movej_pose([0.49,0.14,0.44,-1.14,0,-1.57], 1, 1, 0, [1,1,1,1,1,1], "default", "default", true)
51
52/**
53 * @brief: Move robot via joint motion to target end-effector pose;
54 * @param p: Target end-effector pose, position unit: m, orientation as Rx,Ry,Rz in rad;
55 * @param v: Joint angular velocity, range [0.01*PI/180, 1.25*PI], unit: rad/s;
56 * @param a: Joint acceleration, range [0.01*PI/180, 12.5*PI], unit: rad/s²;
57 * @param r: Blend radius, unit: m, default 0 (no blending). Value >0 indicates blending with next motion;
58 * @param q_near: Nearby joint angles for inverse kinematics solution. Uses current position if empty;
59 * @param tool: Tool coordinate system to use. Defaults to current tool if empty;
60 * @param wobj: Workpiece coordinate system to use. Defaults to current wobj if empty;
61 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
62 * @param op: Optional parameter;
63 * @param def_acc: Whether to use system default acceleration. false uses custom acceleration, true uses system auto-planned acceleration. Optional, default false;
64 * @return: Blocking execution: returns task end status (Finished if no blending, Interrupt if blended);
65 * Non-blocking execution: returns task ID for querying execution status via get_noneblock_taskstate(id);
66 */
67int32_t movej_pose2(const std::vector<double> & p, double v, double a, double r, const std::vector<double> & q_near, const std::string& tool, const std::string& wobj, bool block, const OP &op = _op, bool def_acc = false) ;
68// Example:
69movej_pose2([0.49,0.14,0.44,-1.14,0,-1.57], 1, 1, 0, [1,1,1,1,1,1], "default", "default", true)
70
71/**
72 * @brief: Move robot end-effector along a straight path to target pose;
73 * @param p: Target end-effector pose, position unit: m, orientation as Rx,Ry,Rz in rad;
74 * @param v: End-effector velocity, range [0.00001, 5], unit: m/s;
75 * @param a: End-effector acceleration, range [0.00001, ∞], unit: m/s²;
76 * @param r: Blend radius, unit: m, default 0 (no blending). Value >0 indicates blending with next motion;
77 * @param q_near: Nearby joint angles for inverse kinematics solution. Uses current position if empty;
78 * @param tool: Tool coordinate system to use. Defaults to current tool if empty;
79 * @param wobj: Workpiece coordinate system to use. Defaults to current wobj if empty;
80 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
81 * @param op: Optional parameter;
82 * @param def_acc: Whether to use system default acceleration. false uses custom acceleration, true uses system auto-planned acceleration. Optional, default false;
83 * @return: Blocking execution: returns task end status (Finished if no blending, Interrupt if blended);
84 * Non-blocking execution: returns task ID for querying execution status via get_noneblock_taskstate(id);
85 */
86int32_t movel(const std::vector<double> & p, double v, double a, double r, const std::vector<double> & q_near, const std::string& tool = "default", const std::string& wobj = "default", bool block = true, const OP &op = _op, bool def_acc = false) ;
87// Example:
88movel([0.49,0.14,0.44,-1.14,0,-1.57], 1, 1, 0, [1,1,1,1,1,1])
89
90/**
91 * @brief: Move robot along a straight path in tool coordinate system by specified offset;
92 * @param pose_offset: Pose offset in tool coordinate system;
93 * @param v: Linear velocity, range [0.00001, 5], unit: m/s (if x,y,z all 0, converted proportionally to angular velocity);
94 * @param a: Acceleration, range [0.00001, ∞], unit: m/s²;
95 * @param r: Blend radius, unit: m, default 0 (no blending). Value >0 indicates blending with next motion;
96 * @param tool: Tool coordinate system to use. Defaults to current tool if empty;
97 * @param block: Whether to block. If false, it's a non-blocking command and will return immediately;
98 * @param op: Optional parameter;
99 * @param def_acc: Whether to use system default acceleration. false uses custom acceleration, true uses system auto-planned acceleration. Optional, default false;
100 * @return: Blocking execution: returns task end status (Finished if no blending, Interrupt if blended);
101 * Non-blocking execution: returns task ID for querying execution status via get_noneblock_taskstate(id);
102 */
103int32_t tcp_move(const std::vector<double> & pose_offset, double v, double a, double r, const std::string& tool, bool block, const OP &op = _op, bool def_acc = false) ;
104// Example:
105movetcp([0.49,0.14,0.44,-1.14,0,-1.57], 1, 1, 0, "default", "default")