Running and Operating MoveIt Examples#
Robotic Arm Control Solutions#
If you need to control the robotic arm’s motion, we provide two methods.
Method 1: Control via Rviz software.
Method 2: Control via command line in the terminal.
First, we’ll introduce Method 1 using RVIZ to control the robotic arm. Method 2 will be covered in the next section:
Method 1: Controlling the Robotic Arm in Rviz Software#
After entering Rviz, you can see the robotic arm model and the small ball at its end-effector.
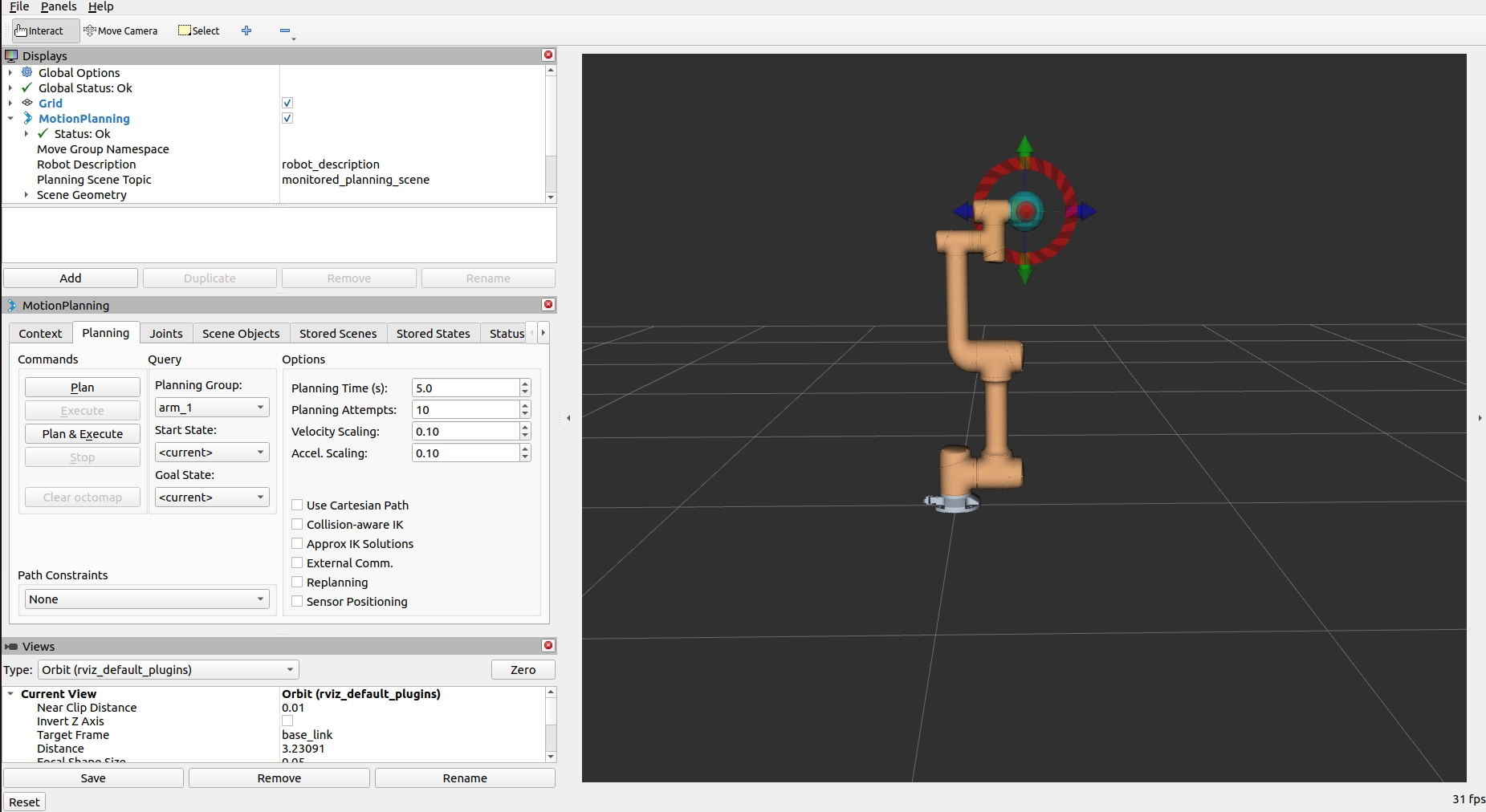
Viewport control instructions:
Mouse wheel: Controls zoom distance.
Left mouse button: Drags the ball and rotates the viewpoint.
Right mouse button: Controls the pivot point for rotation.
There are two ways to control the robotic arm:
- First method:
- Directly drag the ball to the desired position.
RVIZ modeling will automatically simulate the joint angles and arm posture needed for the end-effector to reach the ball position.
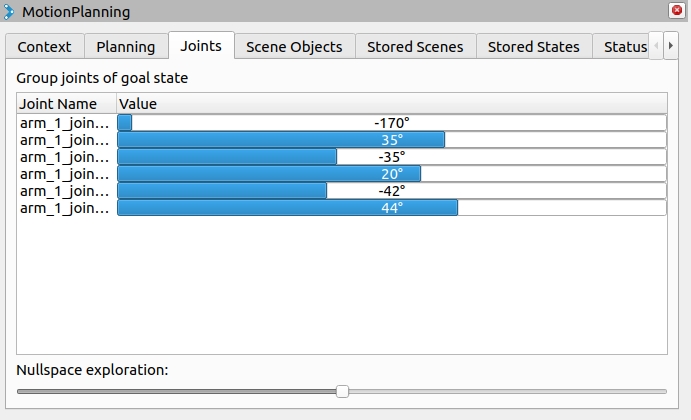
- Second method:
Enter the Joints interface in the left MotionPlanning panel to individually control each joint angle.
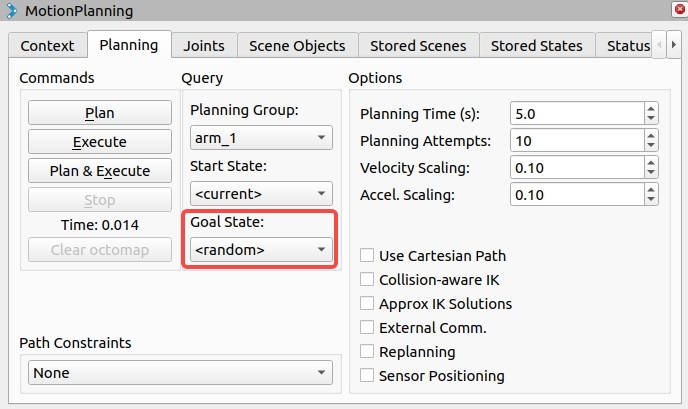
After adjusting the arm position, enter the Planning tab in the left MotionPlanning panel.
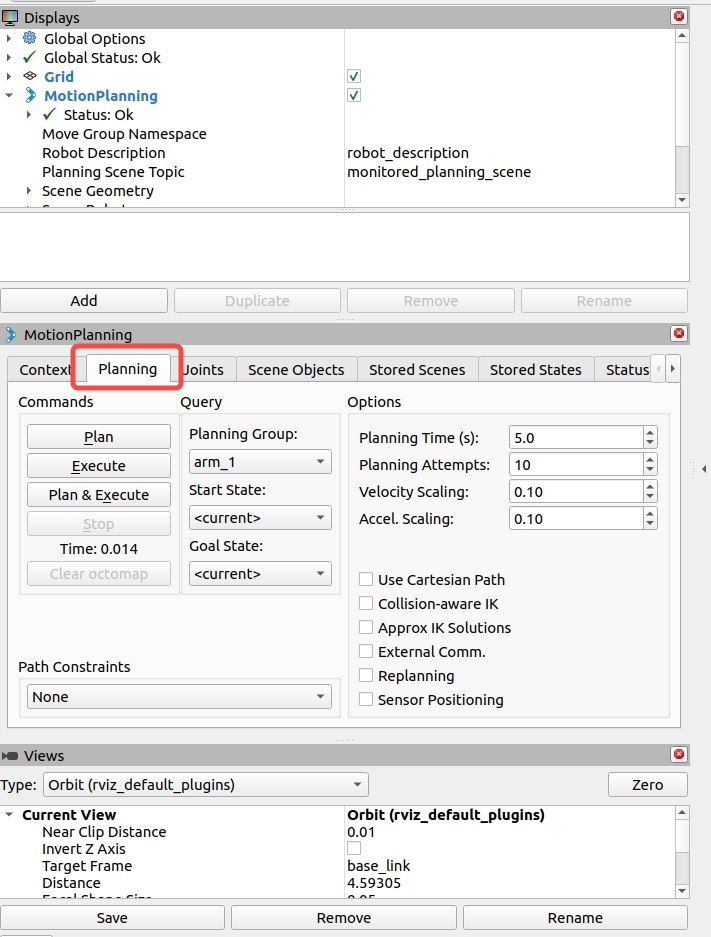
Click “Plan & Execute”.
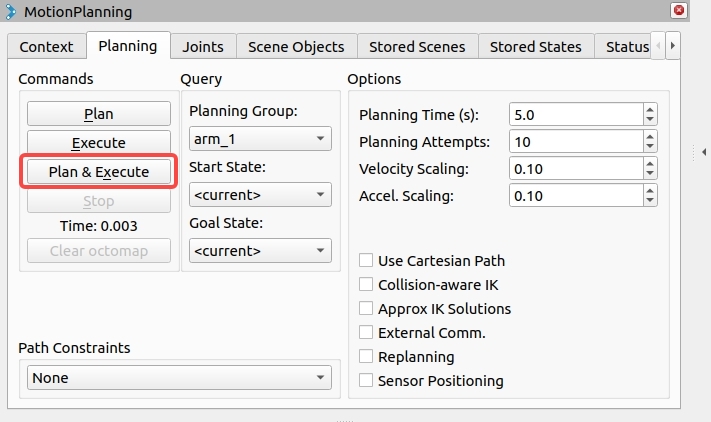
“Plan” will automatically calculate the arm’s motion trajectory. “Execute” will move the physical arm along the calculated path according to set speed and acceleration parameters, until it reaches the position and posture set in RVIZ.
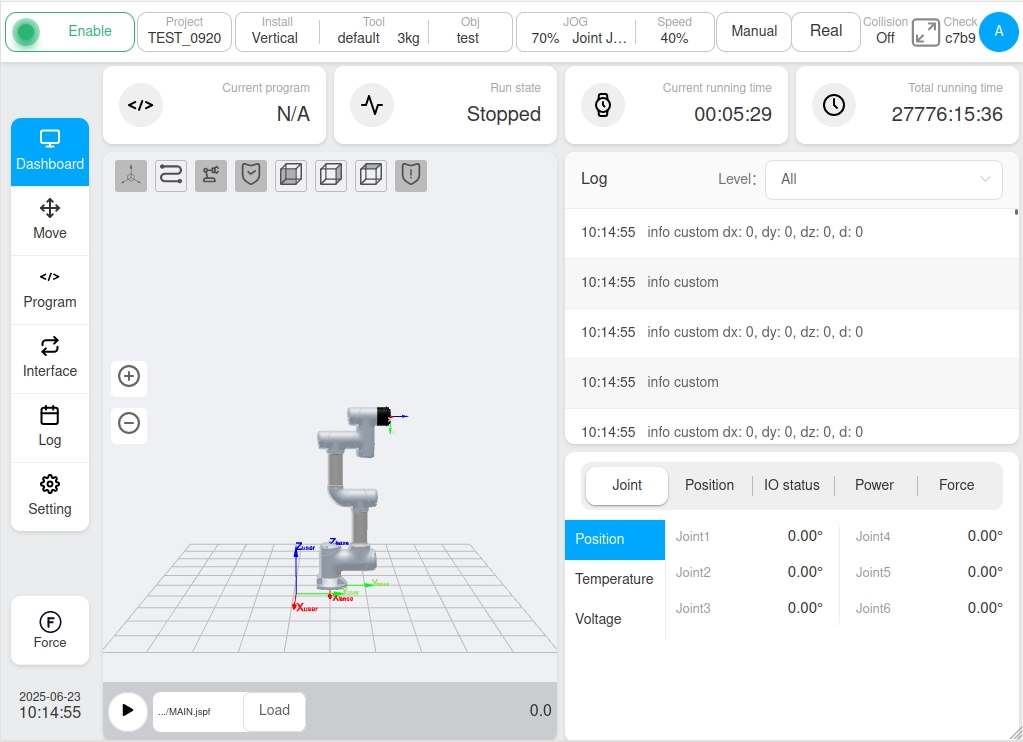
(You can open the domain address in a browser to monitor actual arm position, interfaces, logs, etc.)
You can also use “Plan” alone to preview the path in simulation, then separately execute “Execute” to move the actual arm.
To select random postures, change the Goal State parameter to “random” - the arm will select a random configuration.
To add features like TF display:
Find the Displays panel on the left side of RVIZ.
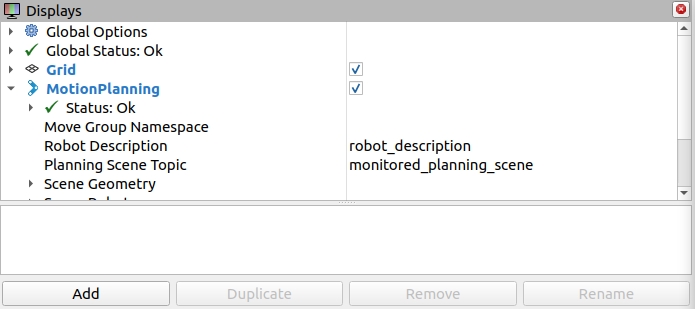
Click the “Add” button at the bottom left.
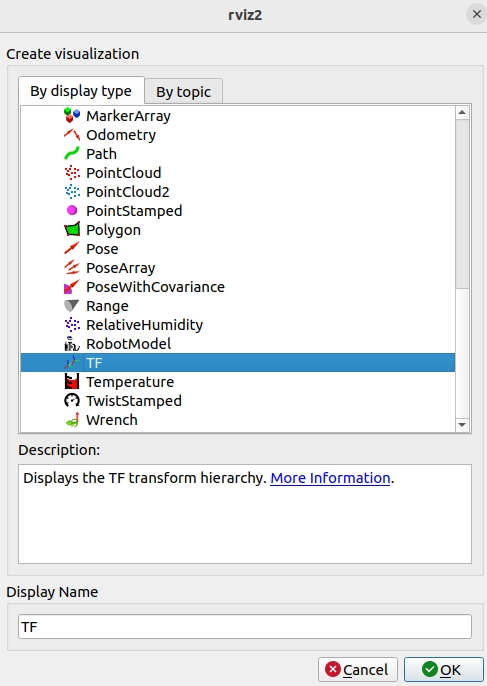
Select desired features and click “OK” to enable.
(The next section will cover command-line control of the robotic arm)