System-Übersicht#
Projektleitung#
Das System unterstützt die Verwaltung mehrerer Projekte, wobei die Projektdaten das Roboterprogramm, globale Projektvariablen, Projekteinstellungen und andere Informationen umfassen. Wenn das System mit dem Laden beginnt, werden die aktuellen Projektdaten gemäß den Systemeinstellungen geladen. Andere Projektdaten können im aktuellen Projekt nicht verwendet werden.
Vorsicht
Alle Projektdaten, wie z. B. die Einstellungen auf der Schnittstellenseite, die Einstellungen auf der Einstellungsseite usw., müssen nach dem Einstellen des Projekts gespeichert werden, damit es beim nächsten Start korrekt geladen wird.
Benutzerverwaltung#
Das System unterstützt die Verwaltung mehrerer Benutzer. Die Benutzerberechtigungen sind wie folgt definiert: Operator, Programmierer, Maintainer und Admin. Die spezifischen Berechtigungen werden wie folgt beschrieben:
Bediener
Ermöglicht die Auswahl eines Projekts, das Ausführen eines Programms, das manuelle Joggen eines Programms, das Anzeigen des Roboterstatus usw.
Programmierer
Benutzerberechtigungen des Bedieners
Programmieren eines Roboterprogramms, Projektkonfiguration
Der Standardbenutzername ist default und das anfängliche Passwort ist 123
Wartungspersonal
Benutzerberechtigungen des Bedieners
Systemaktualisierung
Admin
Benutzerberechtigungen des Wartungspersonals
Benutzerverwaltung
Der Benutzername ist admin und das anfängliche Passwort ist 123
Übersicht der Benutzerseite#
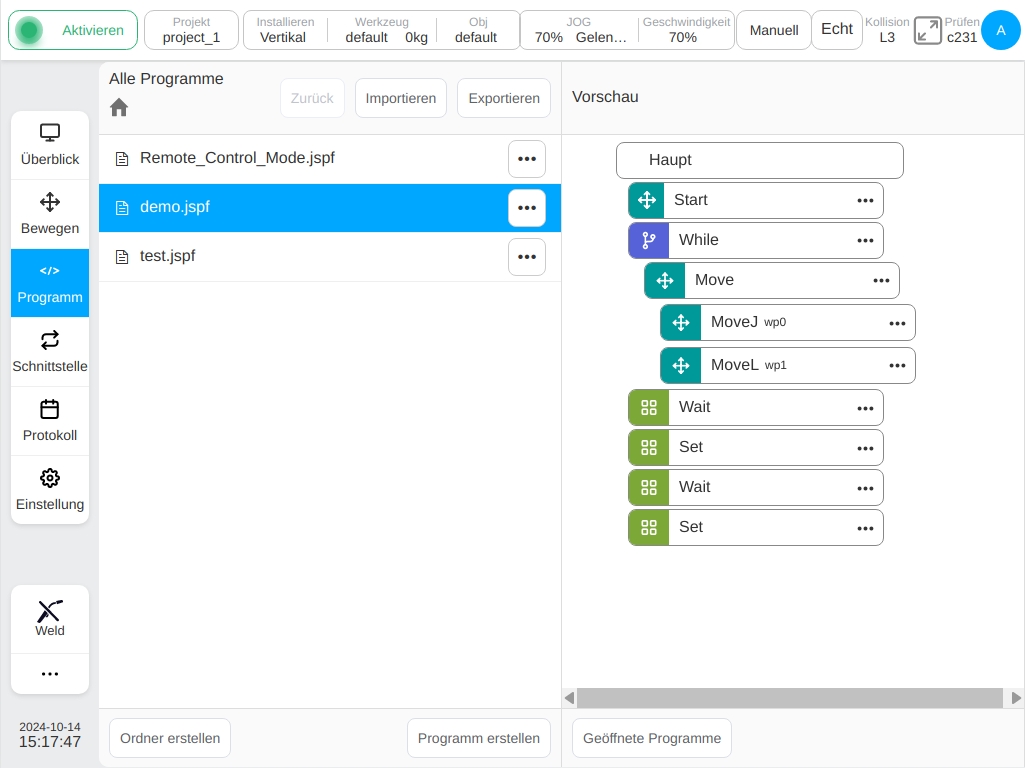
Wie in der Abbildung dargestellt, ist die gesamte Oberfläche hauptsächlich in drei Teile unterteilt: die Hauptstatusleiste, die linke Navigationsleiste und der rechte Inhaltsbereich. Der Inhaltsbereich präsentiert verschiedene Inhalte (Unterseiten), die auf der Auswahl der linken Navigationsleiste basieren. Unterhalb der Navigationsleiste befinden sich der Plug-in-Eintrag sowie Datum und Uhrzeit des Systems.
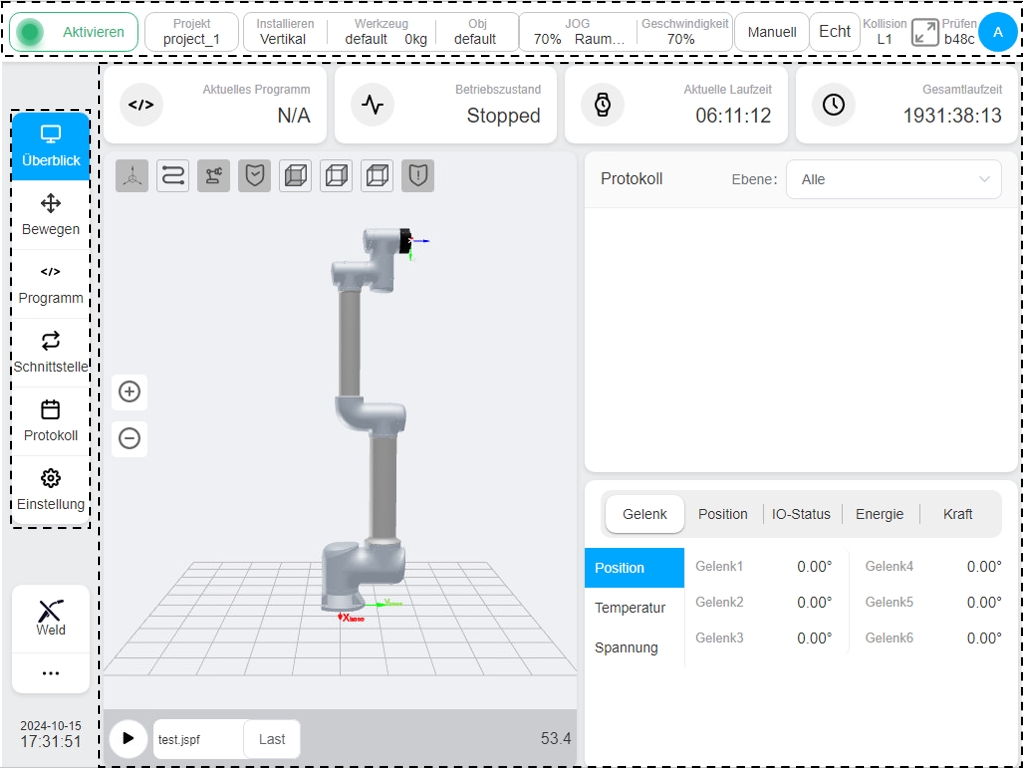
Zu den wichtigsten Informationen, die in der Statusleiste angezeigt werden, gehören: Statusanzeige des Robotergelenks, Statusanzeige, aktuelles Projekt, Installationsrichtung des Roboters, Informationen über das aktuelle Werkzeugkoordinatensystem und das Werkstückkoordinatensystem, prozentuale Geschwindigkeit, Betriebsmodus, Informationen zur Einstellung der Kollisionserkennung, Sicherheitsprüfcode und Benutzerinformationen.
Die Navigationsleiste enthält sechs ICONS: Dashboard, Verschieben, Programm, Schnittstelle, Protokoll und Einstellung. Klicken Sie auf das Symbol der Navigationsleiste, um den im Inhaltsbereich angezeigten Inhalt zu wechseln. Die Hauptinhalte der einzelnen Seiten werden wie folgt beschrieben:
Die Übersichtsseite ist eine Produktionsansichtsseite, auf der die auszuführenden Programme ausgewählt werden können und grundlegende Informationen wie Programmstatus, Systemlaufzeit, Systemprotokolle und gemeinsame Positionen angezeigt werden.
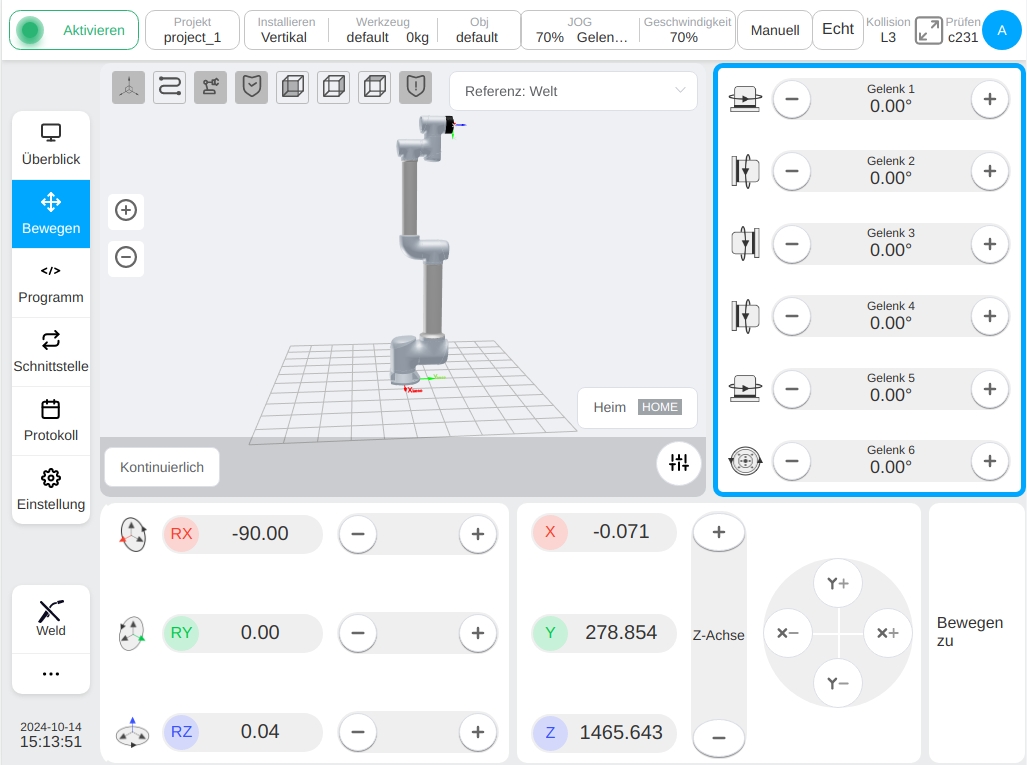
Die Bewegungsschnittstelle ermöglicht dem Benutzer die manuelle Bedienung des Roboters, die Einstellung des Koordinatensystems sowie des Bewegungsmodus der manuellen Bewegung.
Die Programmoberfläche ist die Hauptprogrammierseite des Roboters, auf der der Benutzer die Programmdateien im Projekt verwalten und die Roboteraufgaben über die mitgelieferte grafische Programmierumgebung schreiben kann.
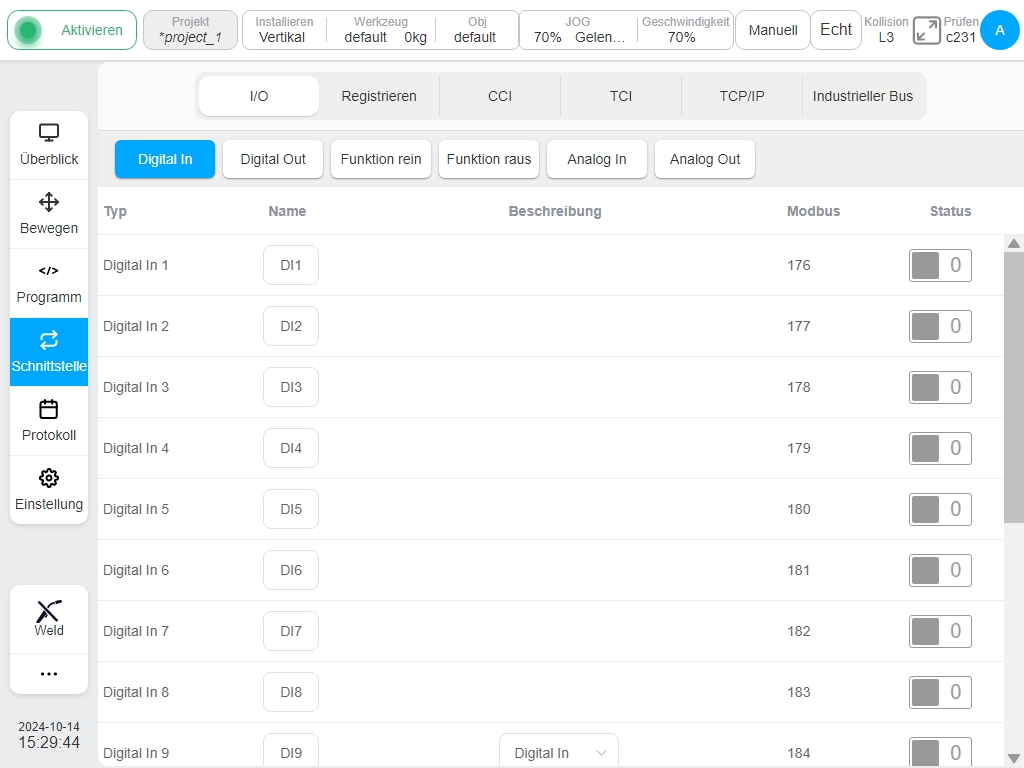
Auf der Schnittstellenseite kann der Benutzer alle externen Schnittstellen des Roboters konfigurieren, einschließlich digitaler Ein- und Ausgänge, analoger Ein- und Ausgänge, TCP/IP-Schnittstellen und anderer industrieller Feldbusschnittstellen.
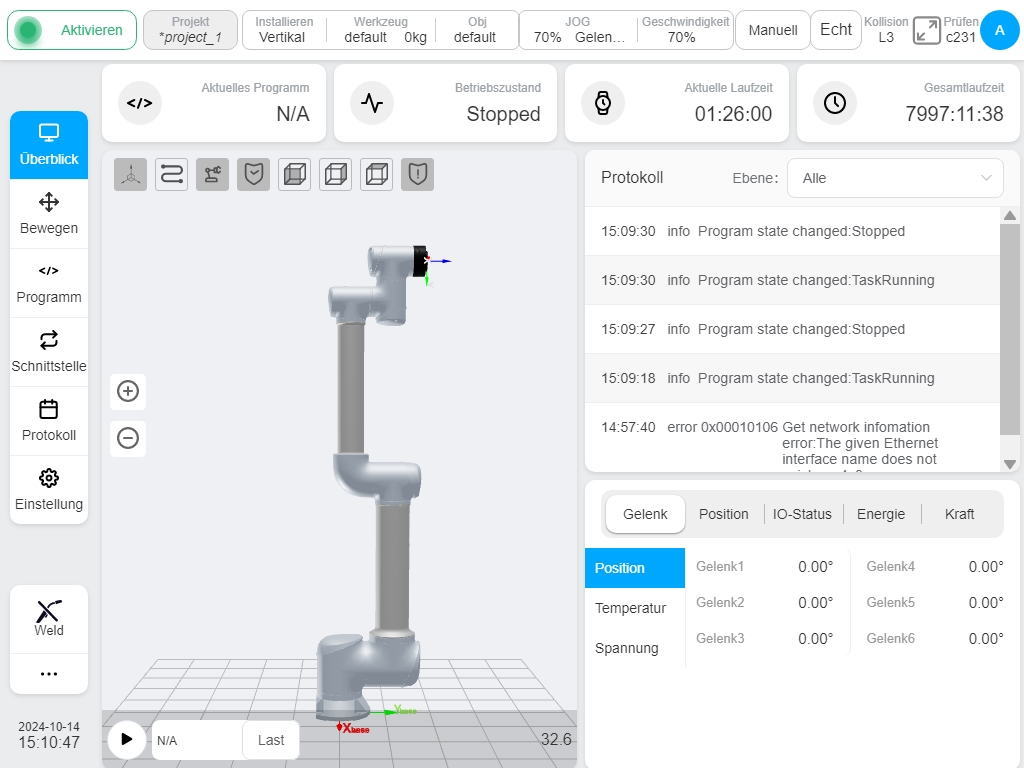
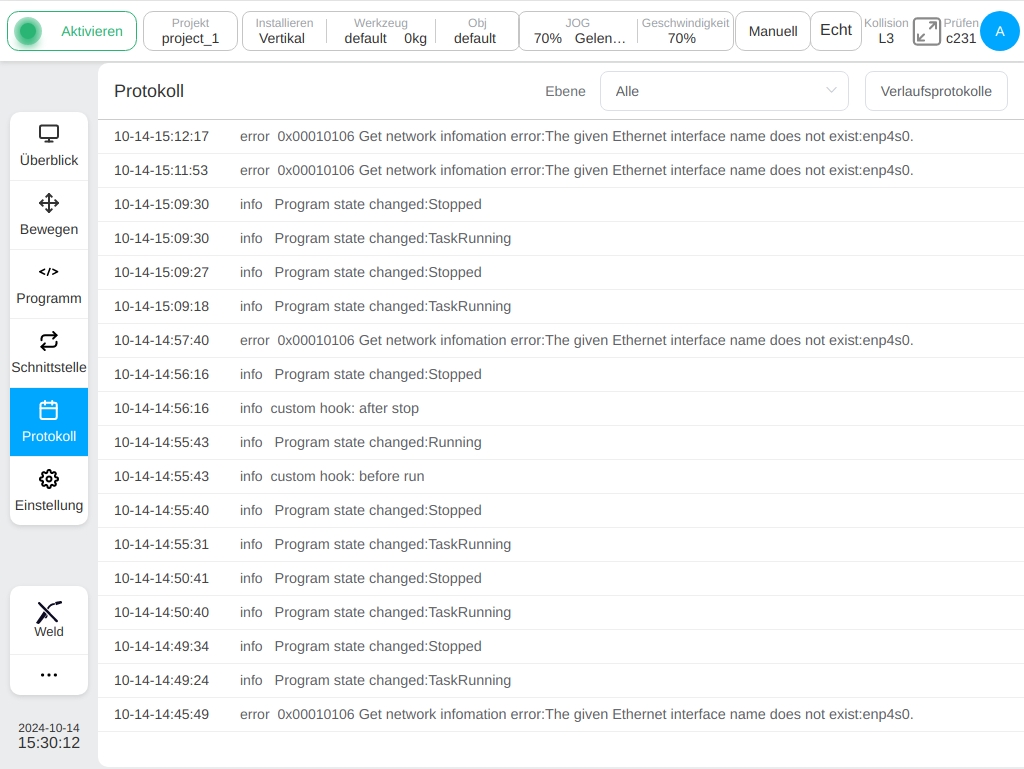
Auf der Protokollseite werden die Systemprotokollinformationen dieses Startvorgangs angezeigt.
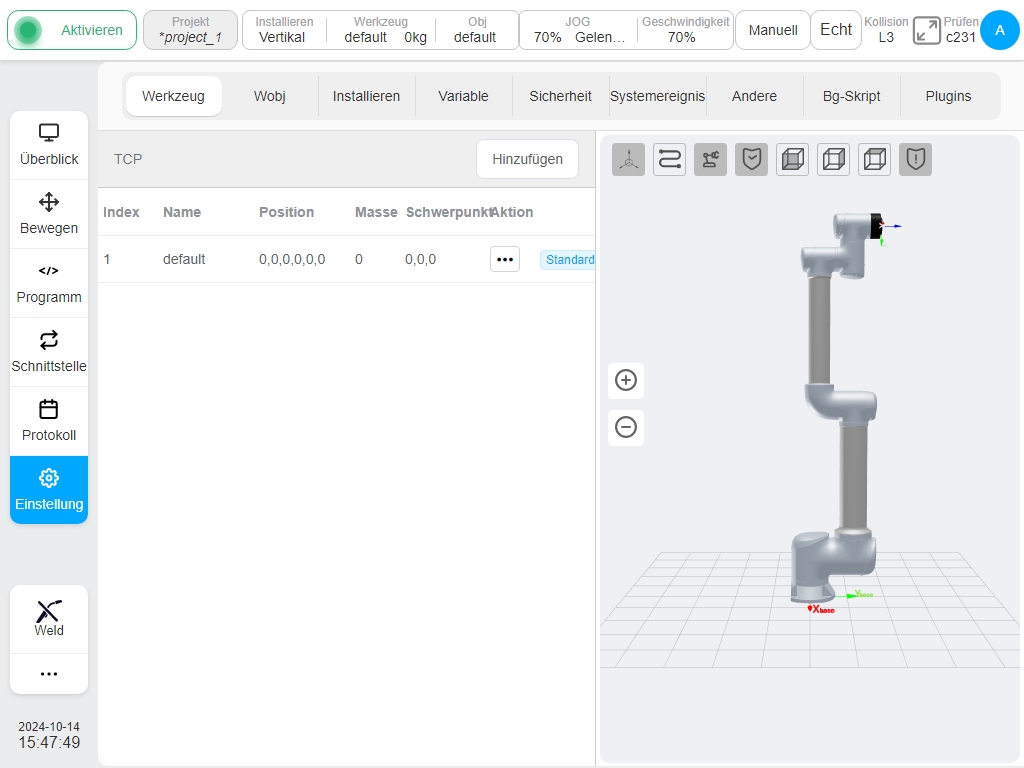
Die Einstellungsseite enthält die aktuellen Projektkonfigurationseinstellungen, darunter die Einstellungen für das Koordinatensystem, die Verlegerichtung und die Sicherheitseinstellungen.
Multi-Terminal-Verbindung#
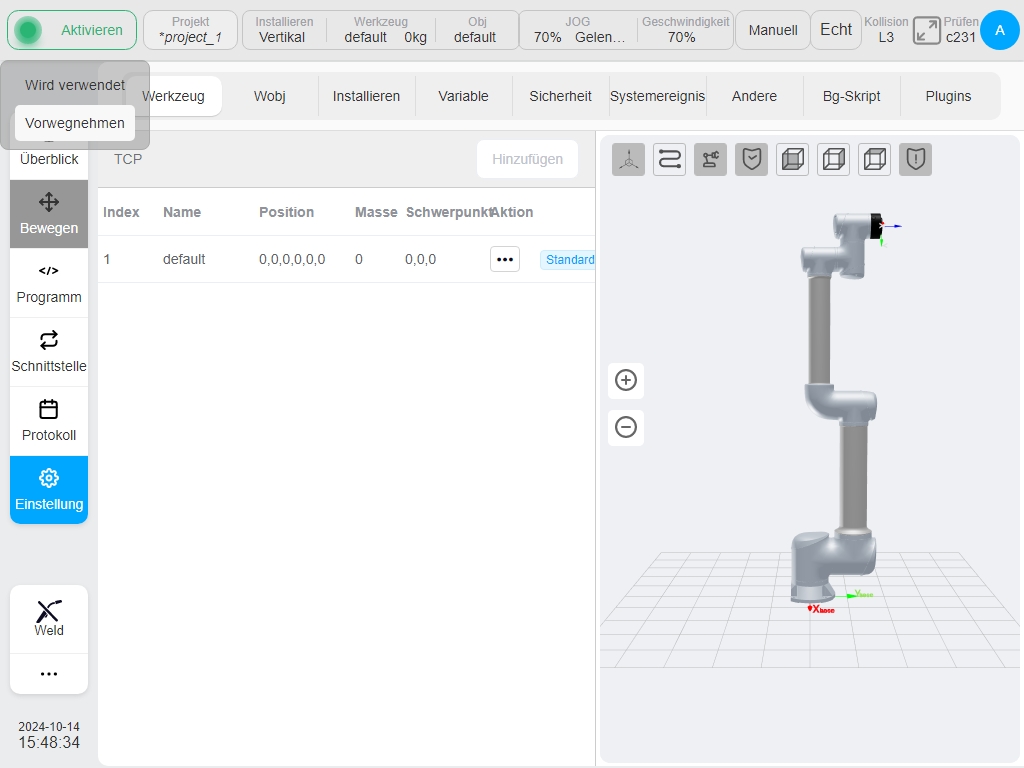
Das System unterstützt den gleichzeitigen Anschluss mehrerer Terminals, aber nur ein Terminal hat die Kontrolle und kann alle Funktionen wie Programmbetrieb und Systemkonfiguration ausführen. Andere Terminals haben nur die Berechtigung zum Überwachen, können aber nicht auf den Betrieb des Roboters zugreifen oder Einstellungen ändern. Das Terminal ohne Steuerungsberechtigung wird wie folgt dargestellt:
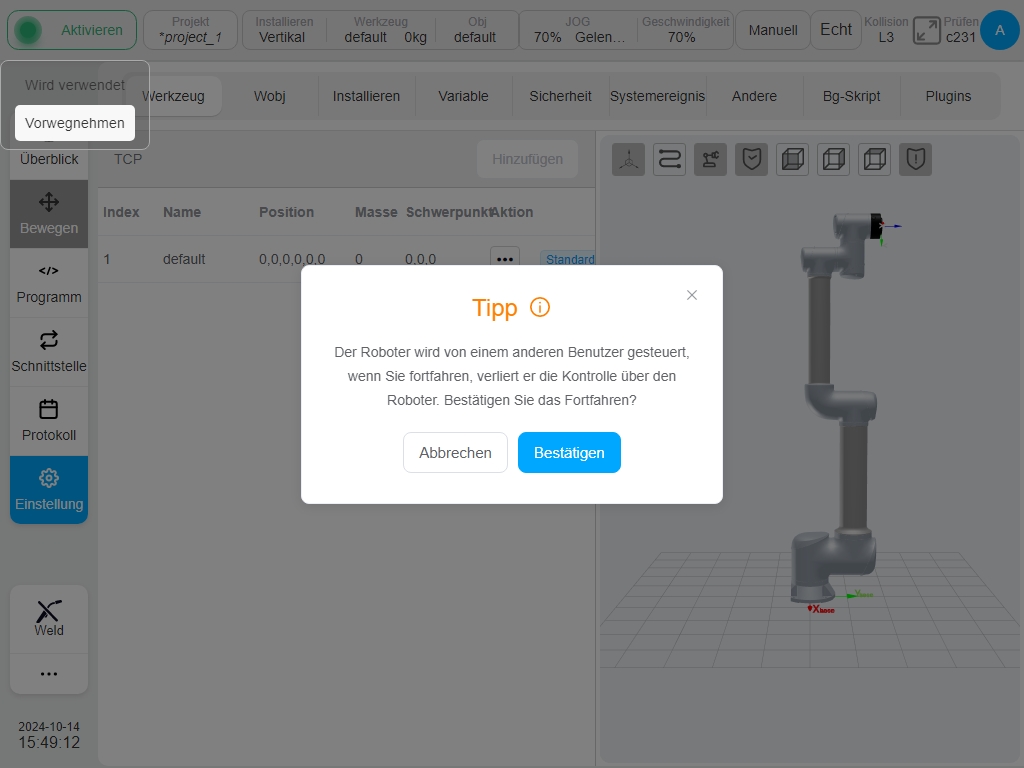
Wenn andere Terminals die Kontrolle übernehmen wollen, klicken Sie auf die Schaltfläche „Kontrolle übernehmen“ in der oberen linken Ecke, um um Erlaubnis zu bitten. Wenn das folgende Dialogfeld angezeigt wird, klicken Sie auf die Schaltfläche „OK“, um die Kontrolle über das System zu erhalten; die Kontrolle des vorherigen Terminals geht dann verloren.
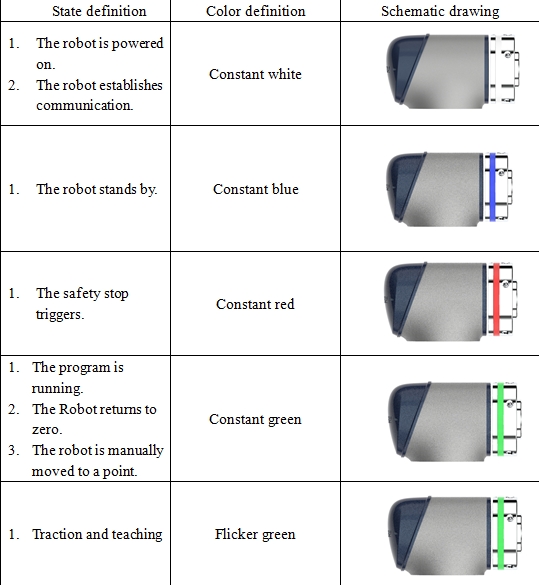
Endleuchte mit Indikator#