Sicherheitseinstellungen#
In diesem Abschnitt wird beschrieben, wie Sie Sicherheitskonfigurationen anzeigen und Sicherheitskonfigurationen von Anwendungen ändern können. Derzeit gibt es zwei Arten von Sicherheitssteuerungen: DucoSafetyV1.0 für DC30-Schaltschränke. DucoSafetyV2.0 Passt zu DC00 / DC15S/ DC30D-Schaltschränken.
DucoSafety V1.0#
Ansicht Sicherheitskonfigurationen#
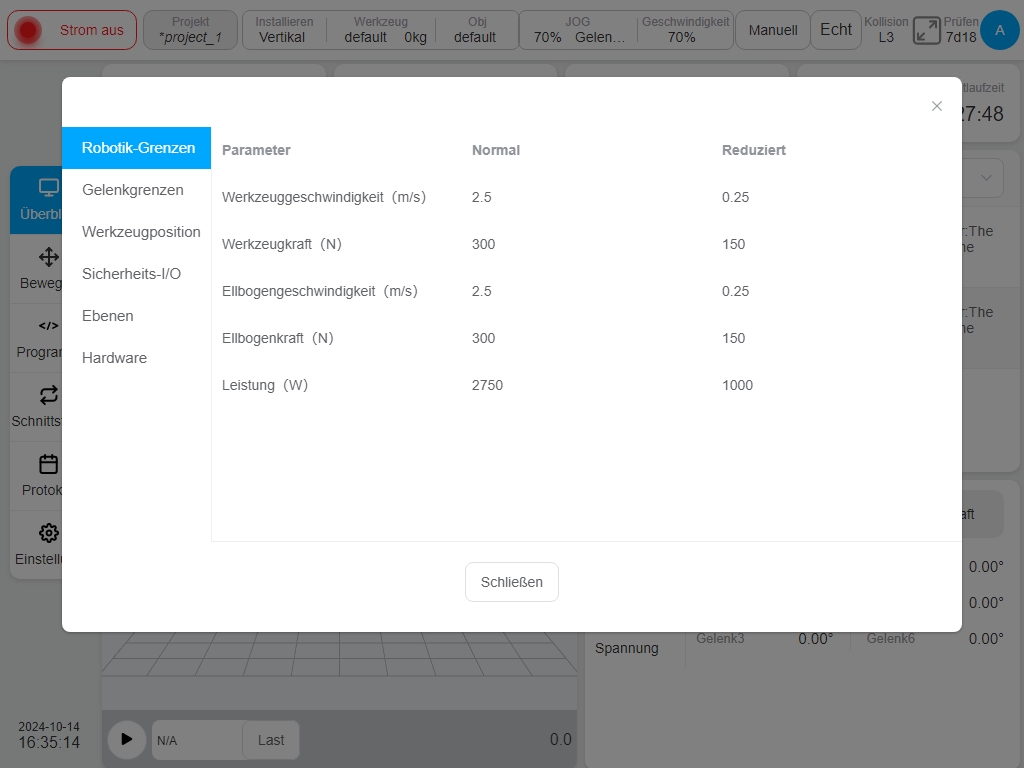
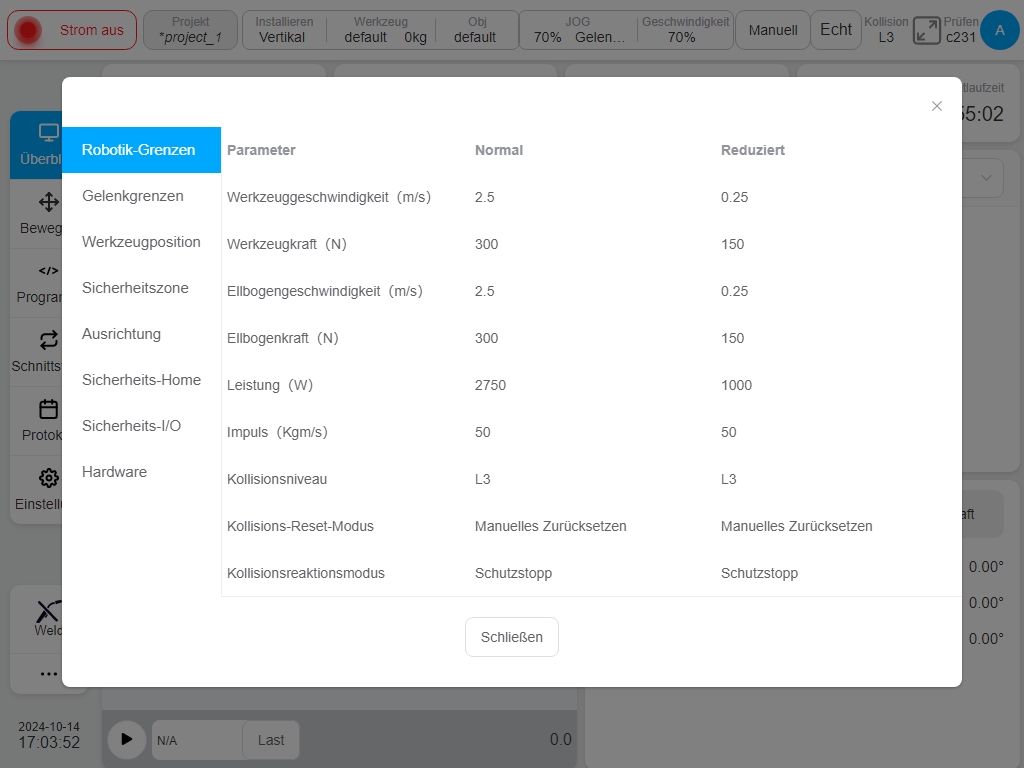
Klicken Sie auf die Schaltfläche „Sicherheitsüberprüfung“ in der Statusleiste. Das folgende Dialogfeld wird angezeigt, um die derzeit aktivierten Sicherheitskonfigurationsparameter anzuzeigen.
Der Benutzer kann die Parameter der Sicherheitskonfiguration auch auf der Seite mit den Sicherheitseinstellungen einsehen.
Antrag auf Änderung der Sicherheitskonfiguration#
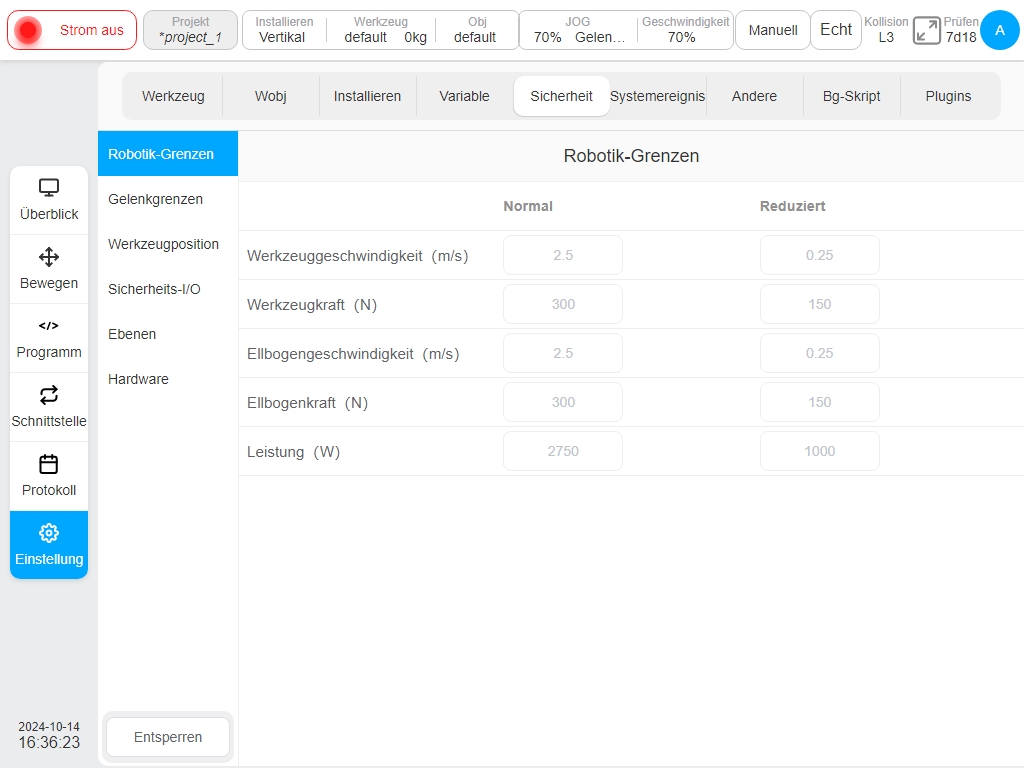
Sie müssen das Passwort verwenden, um das Konto zu entsperren, bevor Sie die Sicherheitskonfiguration ändern. Rufen Sie die Einstellungsseite auf - Sicherheitskonfiguration, klicken Sie auf die Schaltfläche „Entsperren“ unten links, um den Roboter nur bei ausgeschaltetem Gerät zu entsperren. Durch Eingabe des Passworts (Login-Passwort des aktuellen Benutzers) gelangen sie in den Konfigurationsmodus für die Sicherheitsparameter, nachdem die Überprüfung bestanden wurde. Der Statusbereich in der Statusleiste wird als Sicherheitsparametereinstellungen angezeigt.
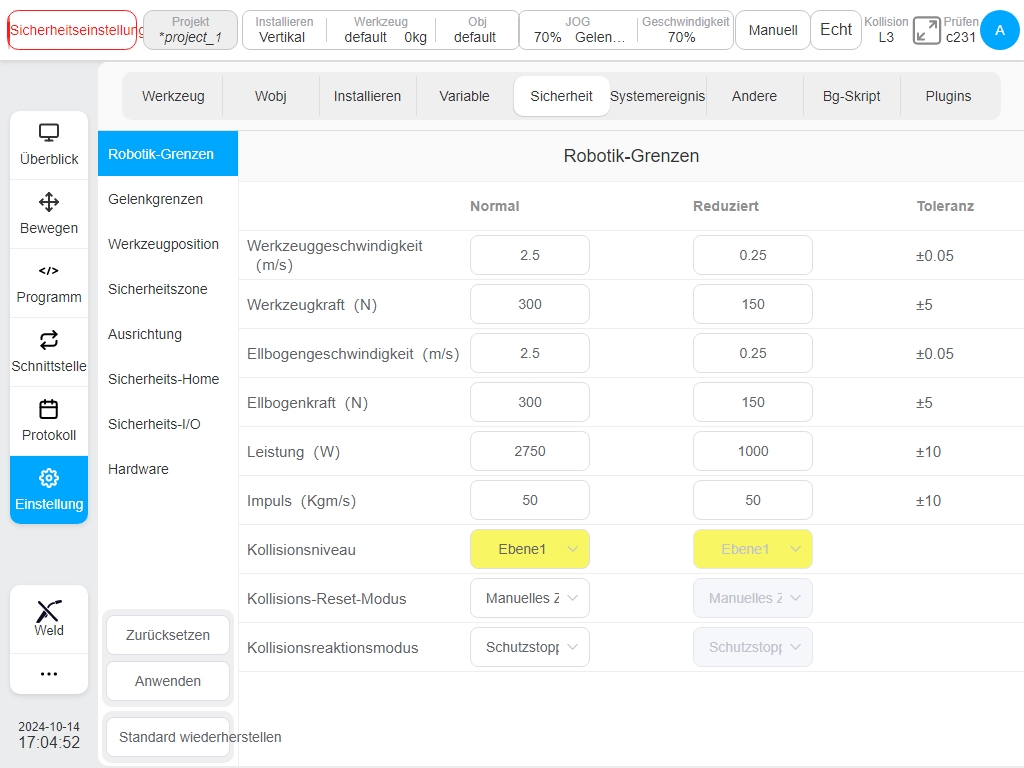
Wenn Sie die Konfiguration ändern, wird die Änderung gelb hervorgehoben. Alle vorgenommenen Änderungen werden erst wirksam, wenn Sie auf die Schaltfläche „Einstellungen übernehmen“ klicken. Wenn Sie auf die Schaltfläche „Standardeinstellungen wiederherstellen“ klicken, werden alle Sicherheitsparameter auf die Standardeinstellungen zurückgesetzt. Nachdem Sie auf die Schaltfläche „Einstellungen übernehmen“ geklickt haben, wird ein Eingabeaufforderungsfenster angezeigt, wie in der Abbildung dargestellt.
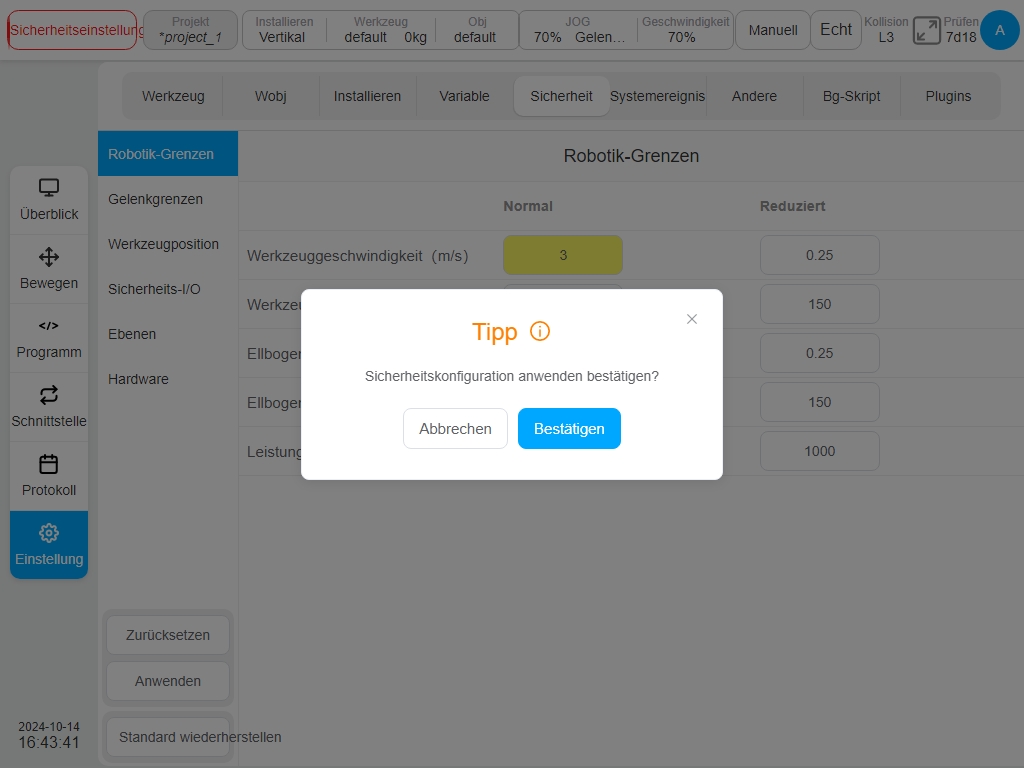
Nachdem Sie auf die Schaltfläche „Bestätigen“ geklickt haben, wird ein Aufforderungsfenster zum Laden von Sicherheitsparametern angezeigt (siehe Abbildung).
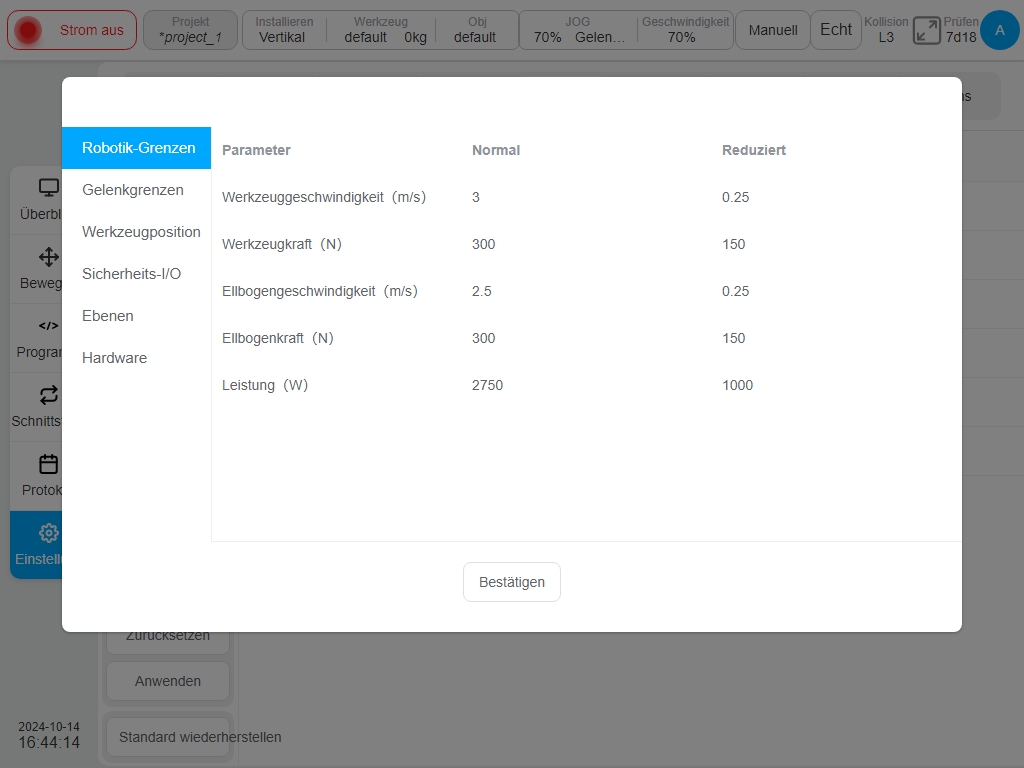
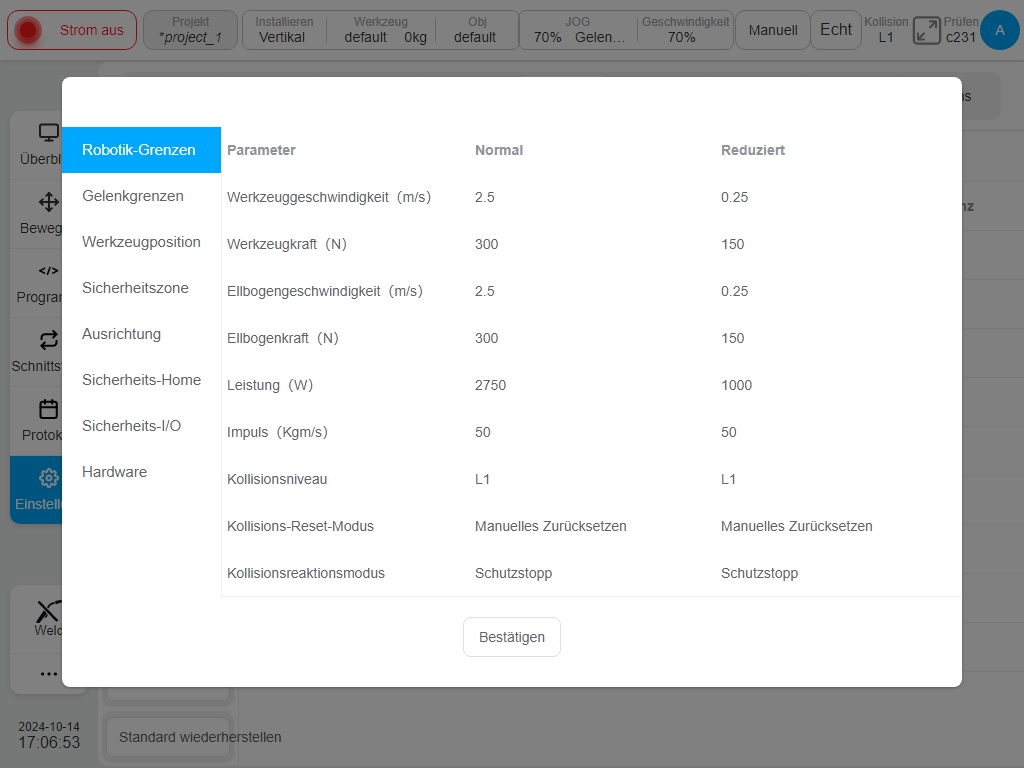
Nachdem die Sicherheitsparameter konfiguriert wurden, zeigt das System die konfigurierten Sicherheitsparameter in einem Dialogfenster zur Überprüfung an. Ein Beispiel ist in der folgenden Abbildung dargestellt. Wenn alles überprüft ist, klicken Sie auf die Schaltfläche „OK“, um die Sicherheitsparameter einzustellen. Nach erfolgreicher Konfiguration wird die Sicherheitsprüfung oberhalb der Statusleiste geändert.
Sicherheitsparameter Beschreibung#
In diesem Abschnitt werden die Parameter der Sicherheitskonfiguration des Roboters beschrieben.
Sicherheitsmodus#
Normaler Modus:Der Sicherheitsmodus ist standardmäßig aktiviert.
Reduzierter Modus: Dieser Modus kann über den Sicherheitseingang IO aktiviert werden.
Wiederherstellungsmodus: Wenn die tatsächlichen Bewegungsparameter des Roboters die Sicherheitsgrenze überschreiten und den Roboter zum Stillstand bringen, wird der Wiederherstellungsmodus aktiviert, und der Benutzer kann den Roboter innerhalb der Sicherheitsgrenze bewegen
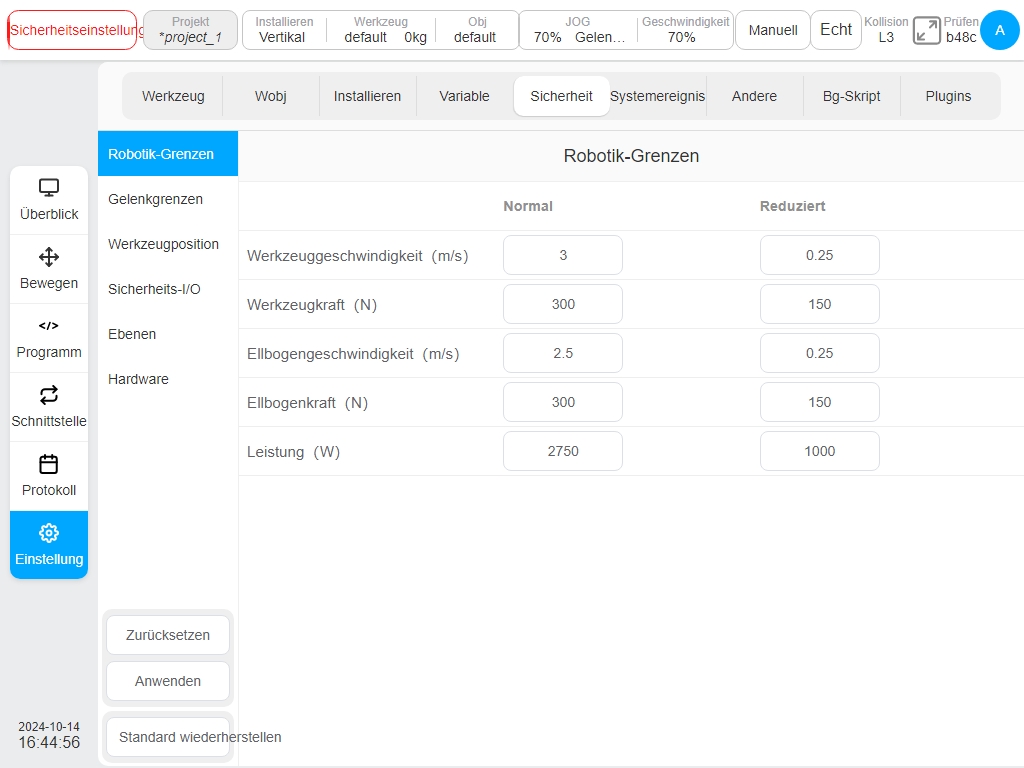
Roboter-Sicherheitsparameter#
Die Roboterparameter werden zur Begrenzung der allgemeinen Roboterbewegung verwendet. Der Benutzer kann die Parameterwerte im Normalmodus und im reduzierten Modus konfigurieren.
Maximale Endgeschwindigkeit Begrenzt die maximale Geschwindigkeit am Ende des Roboters.
Maximale Kraft am Ende Begrenzt die maximale Kraft, die von außen auf das Ende des Roboters ausgeübt wird.
Maximale Ellbogengeschwindigkeit Begrenzt die maximale Ellbogengeschwindigkeit des Roboters.
Maximale Ellbogenkraft Begrenzt die maximale externe Kraft, die vom Ellbogen des Roboters ausgeübt wird.
Leistung Begrenze die maximale mechanische Arbeit, die der Roboter nach außen hin verrichtet.
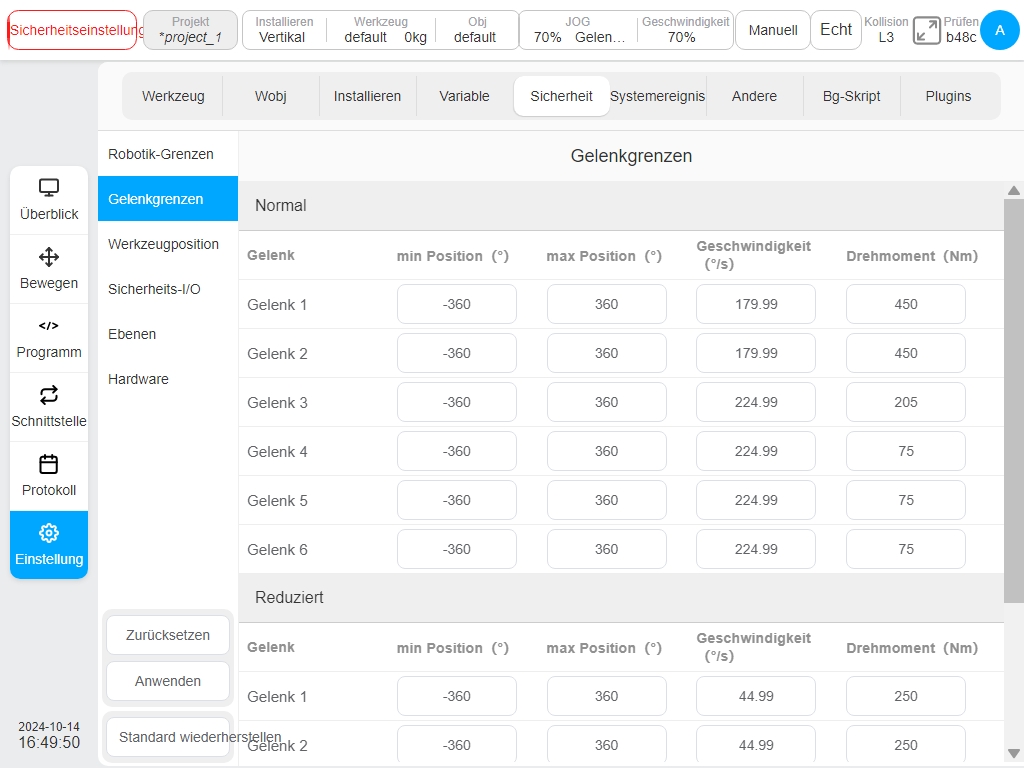
Gemeinsame Sicherheitsparameter#
Die Gelenkparameterbegrenzung wird verwendet, um den Positionsbereich, die maximale Geschwindigkeit und das maximale Drehmoment jedes Gelenks des Roboters zu begrenzen. Sie können die Parameterwerte im Normalmodus und im reduzierten Modus konfigurieren
Positionsbereich:Definiert die minimale und maximale Position jedes Gelenks.
Maximale Geschwindigkeit: Definiert die maximale Winkelgeschwindigkeit jedes Gelenks.
Maximales Drehmoment:Definieren Sie das maximale Drehmoment für jedes Gelenk
Sicherheit TCP#
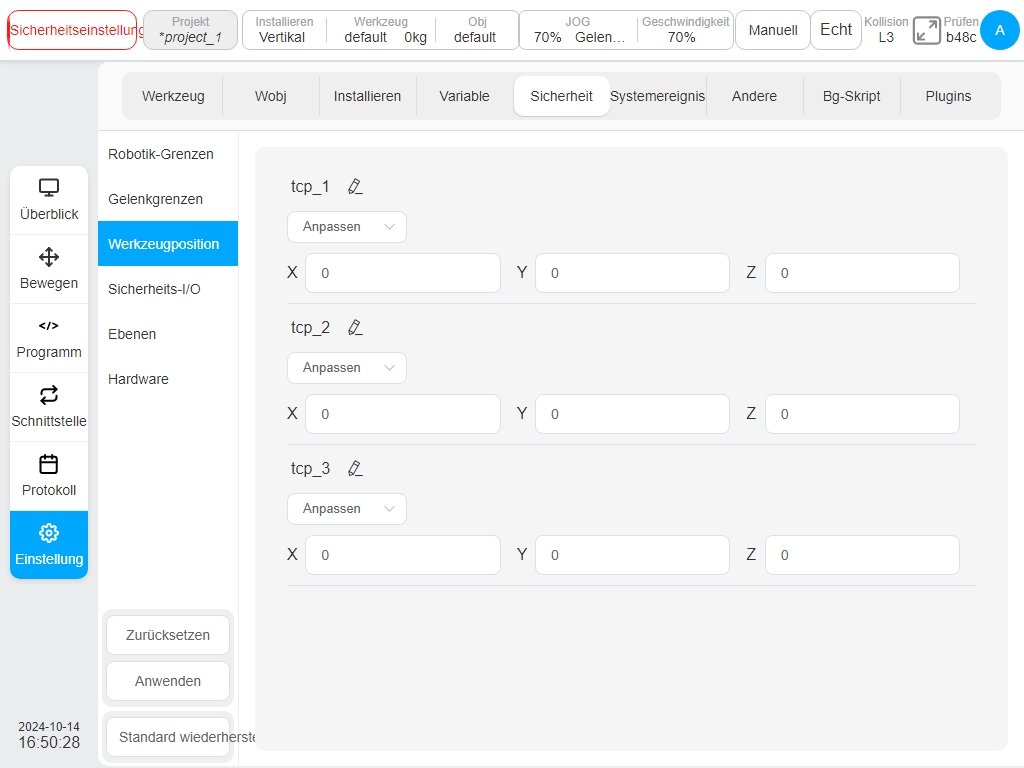
Das Sicherheitssystem kann drei Sätze von TCP-Offsets definieren, die, wenn sie konfiguriert sind, vom Roboter zur Geschwindigkeits- und Positionsüberwachung verwendet werden. Jede TCP-Position oder Geschwindigkeit, die die Sicherheitseinstellung überschreitet, löst eine Sicherheitsverletzung aus.
Die Geschwindigkeitsüberwachung ist die maximale Geschwindigkeit des Werkzeugs unter den „Sicherheitsparametern des Roboters“. Die Positionsüberwachung wird auch „Virtual Boundary“ genannt. In der Dropdown-Box können Sie einen vorhandenen TCP auswählen oder den XYZ-Wert direkt anpassen. Wenn Sie einen vorhandenen TCP auswählen und den Wert in den X-, Y- und Z-Eingabefeldern ändern, wird der TCP-Name im Dropdown-Menü zu „Benutzerdefiniert“, was auf den neu definierten TCP hinweist.
Die Änderung der TCP-Einstellungen hat keinen Einfluss auf die konfigurierten Sicherheitsparameter.
Sicherheit IO#
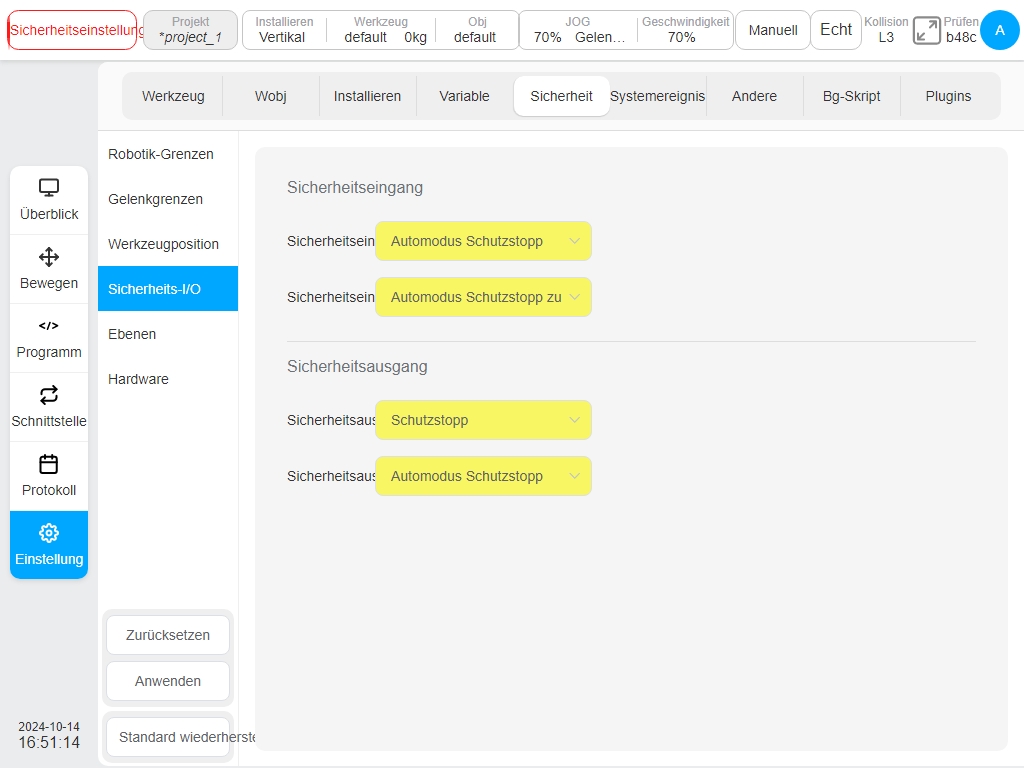
Das Sicherheits-E/A-Modul enthält zwei konfigurierbare Sicherheits-Eingangsanschlüsse und zwei konfigurierbare Sicherheits-Ausgangsanschlüsse.
Zu den Sicherheitsmerkmalen gehören:
Wächter-Reset-Eingang:Wenn der Wächterstopp auftritt, wird der Anschluss ausgelöst und der Roboter kehrt in den Normalzustand zurück
Eingang für Schutzstopp im Automatikmodus: Nach der Konfiguration führt der Roboter einen Schutzstopp durch, wenn er den Anschluss im Automatikmodus auslöst.
Eingang zum Zurücksetzen des Automatikmodusschutzes: Wenn der Automatikmodusschutz endet, wird der Anschluss ausgelöst und der Roboter kehrt in den Normalzustand zurück.
Eingang für reduzierten Modus: Nach der Konfiguration wird dieser Anschluss ausgelöst und der Roboter geht in den reduzierten Modus über. Der Roboter wird so verlangsamt, dass die Parametergrenzwerte den Sicherheitsparametergrenzwerten im reduzierten Modus entsprechen.
Zu den Sicherheitsfunktionen gehören:
Ausgang Guard Stop:Dieser Anschluss wird ausgelöst, wenn sich der Roboter im Zustand „Guard Stop“ befindet.
Automatikmodus-Schutzstop-Ausgang: Dieser Anschluss wird ausgelöst, wenn sich der Roboter im Automatikmodus-Schutzstop befindet.
Ausgang für reduzierten Modus: Dieser Anschluss wird ausgelöst, wenn sich der Roboter im reduzierten Modus befindet.
Virtuelle Grenze#
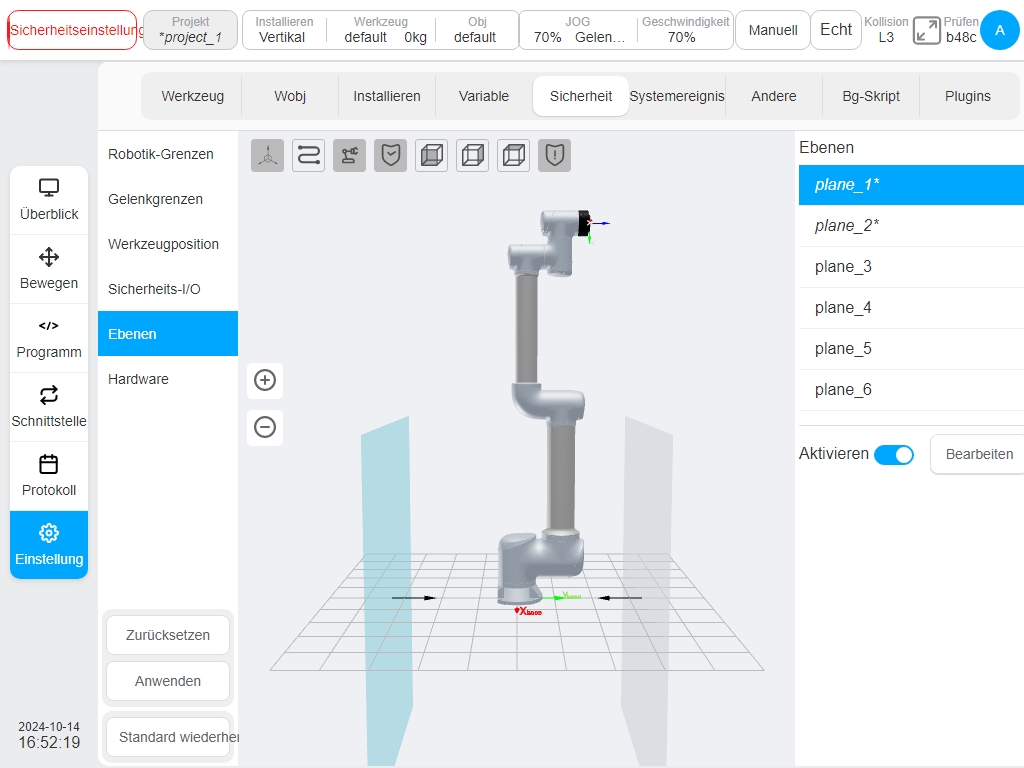
Virtuelle Begrenzungen können verwendet werden, um den Arbeitsbereich des Roboters zu begrenzen. Es können sechs virtuelle Begrenzungen definiert werden, um die Werkzeuge und Ellbogen des Roboters zu begrenzen. Wenn die Werkzeuge und Ellbogen des Roboters die virtuelle Begrenzung berühren, führt der Roboter einen bewachten Stopp aus.
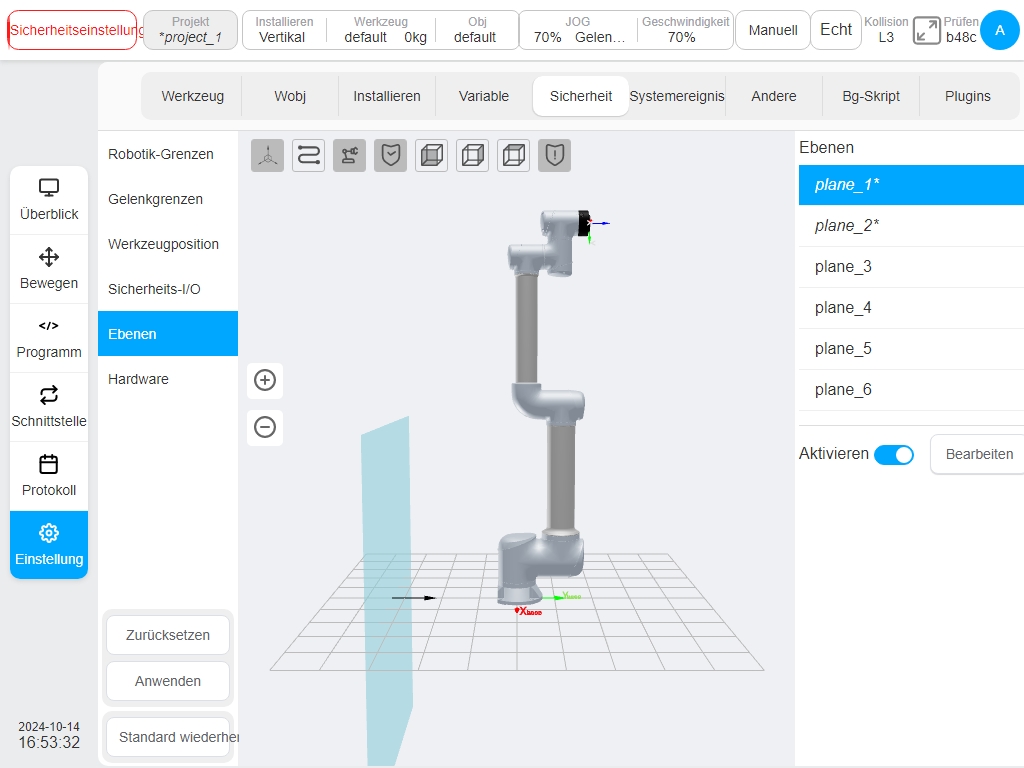
Der grüne Indikator auf der rechten Seite der Benutzeroberfläche zeigt an, dass die Ebene aktiviert ist, während die 3D-Anzeige die Position der aktivierten virtuellen Begrenzung und die effektive Fläche der virtuellen Begrenzung anzeigen kann. Wenn eine Ebene ausgewählt wird, wird die entsprechende Ebene in der 3D-Anzeige hervorgehoben.
Virtuelle Grenzen werden auf folgende Weise definiert:
Wählen Sie ein Referenzkoordinatensystem, das das Weltkoordinatensystem, das Basiskoordinatensystem oder das in der Einstellung definierte Werkstückkoordinatensystem sein kann; wählen Sie eine der Achsen (X, Y, Z) des Referenzkoordinatensystems als normale Achse der virtuellen Ebene und legen Sie den Versatzabstand entlang der Achse fest; ein positiver Wert des Versatzabstands bedeutet einen positiven Versatz entlang der Koordinatenachse, und ein negativer Wert bedeutet einen negativen Versatz entlang der Koordinatenachse. Auf diese Weise wird eine Ebene bestimmt, und der effektive Aktionsbereich des Roboterarms wird so gewählt, dass er sich auf dieser Seite der Ebene befindet. Wenn beispielsweise das Referenzkoordinatensystem als Basiskoordinatensystem gewählt wird, die Z-Achse als Normalachse und der Versatzabstand auf 600 mm festgelegt wird, dann wird die virtuelle Ebene durch Versetzen der XoY-Ebene des Basiskoordinatensystems zur Z-Achse in der positiven Richtung um 600 mm gebildet.
Die folgende Abbildung zeigt die entsprechende Interaktion, wählen Sie eine Ebene, klicken Sie auf die Schaltfläche „Aktivieren“ und „Bearbeiten“, wählen Sie das Referenzkoordinatensystem, die Normalachse, geben Sie den Versatzabstand ein, wählen Sie die effektive Fläche. Klicken Sie auf die Schaltfläche „OK“, um die virtuelle Begrenzung zu definieren. Die auf der virtuellen Ebene angezeigten Pfeile zeigen den aktiven Bereich des Roboters an.
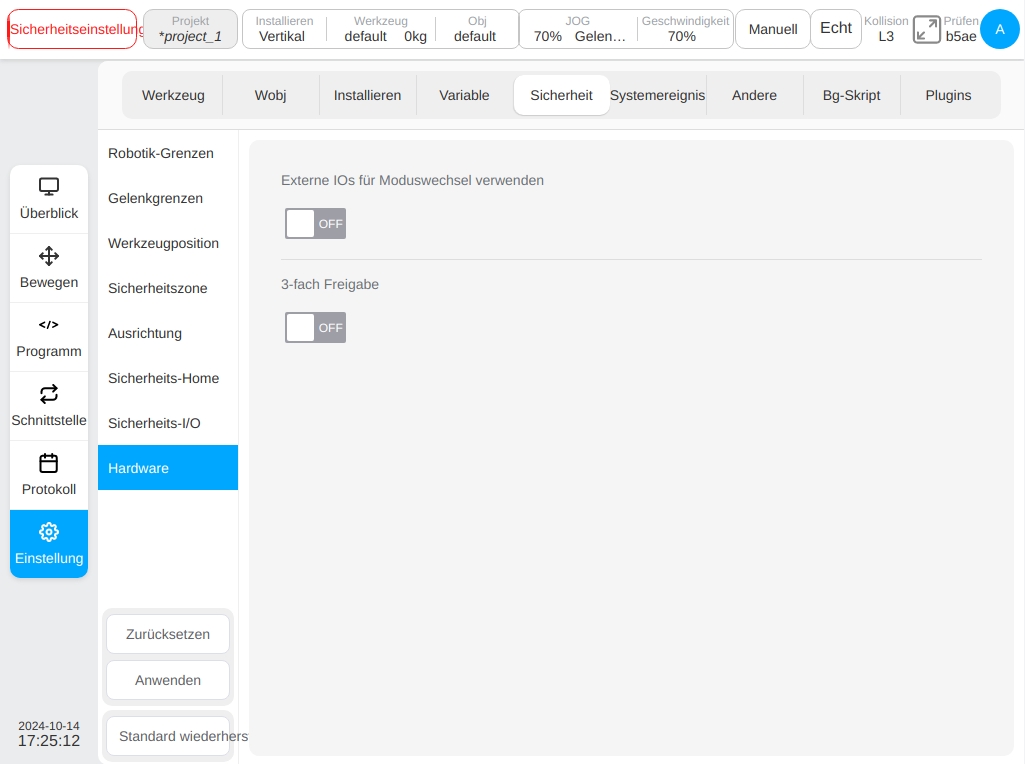
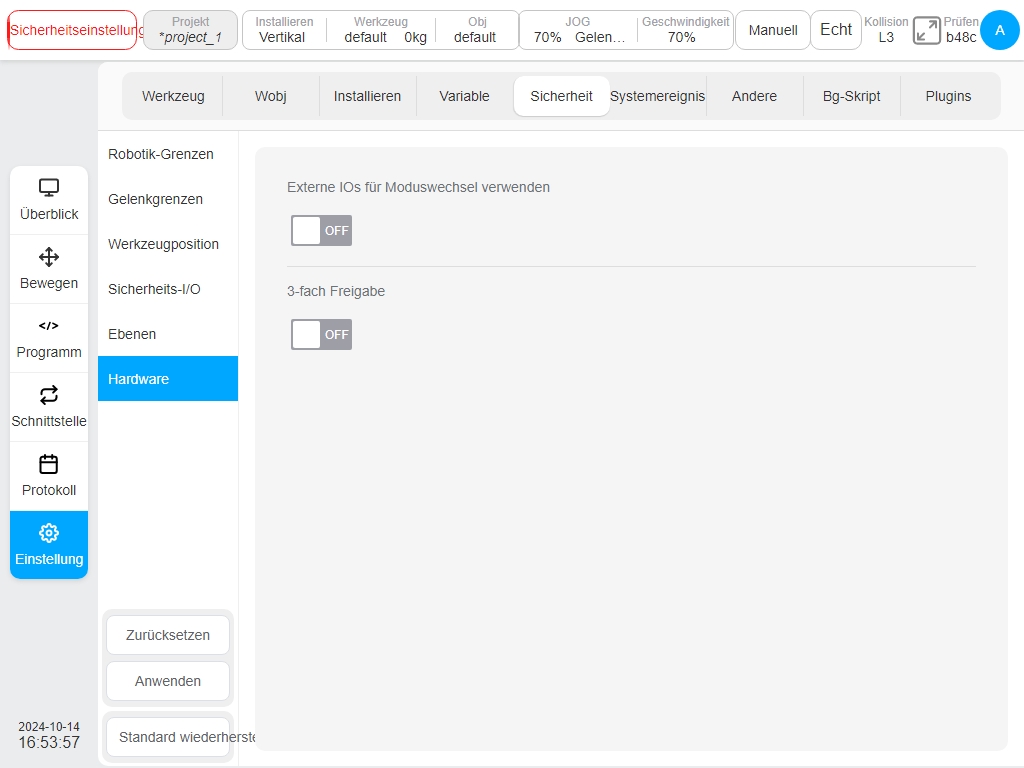
Hardware#
Umfasst die Freigabe externer IO für die Modusumschaltung und einen dreistufigen Freigabeeingang.
Externe IO für Modusumschaltung aktivieren: Wenn dieser Punkt aktiviert ist, kann die manuelle Modusumschaltung über externe IO erfolgen. Die Modusumschaltfunktion in der Statusleiste der Schnittstelle ist ungültig.
Eingang für Dreistellungsfreigabe: Wenn diese Option aktiviert ist, kann der Roboter im manuellen Modus nur bewegt werden, wenn sich der Dreistellungsschalter am Handbediengerät in der Mittelstellung befindet. Wenn sich der Dreistellungsschalter zu irgendeinem Zeitpunkt während der Bewegung des Roboters nicht in der Mittelstellung befindet, wird die Stoppfunktion des Roboters ausgelöst.
DucoSafety V2.0#
Ansicht Sicherheitskonfigurationen#
Klicken Sie auf die Schaltfläche „Sicherheitsüberprüfung“ in der Statusleiste. Das folgende Dialogfeld wird angezeigt, um die derzeit aktivierten Sicherheitskonfigurationsparameter anzuzeigen.
Der Benutzer kann die Parameter der Sicherheitskonfiguration auch auf der Seite Einstellungen - Sicherheitseinstellungen einsehen.
Antrag auf Änderung der Sicherheitskonfiguration#
Vor dem Ändern der Sicherheitskonfiguration muss der Benutzer das Passwort verwenden, um den Roboter zu entsperren. Öffnen Sie die Seite „Setup“ - „Sicherheitskonfiguration“, klicken Sie auf die Schaltfläche „Entsperren“ unten links, nur im Falle eines Stromausfalls kann die Sperre aufgehoben werden, geben Sie das Passwort ein (das Login-Passwort des aktuell angemeldeten Benutzers) und gehen Sie dann in den Konfigurationsmodus für die Sicherheitsparameter, nachdem Sie die Überprüfung bestanden haben. Zu diesem Zeitpunkt zeigt der Statusanzeigebereich in der Statusleiste „Sicherheitsparameter-Konfiguration“ an.
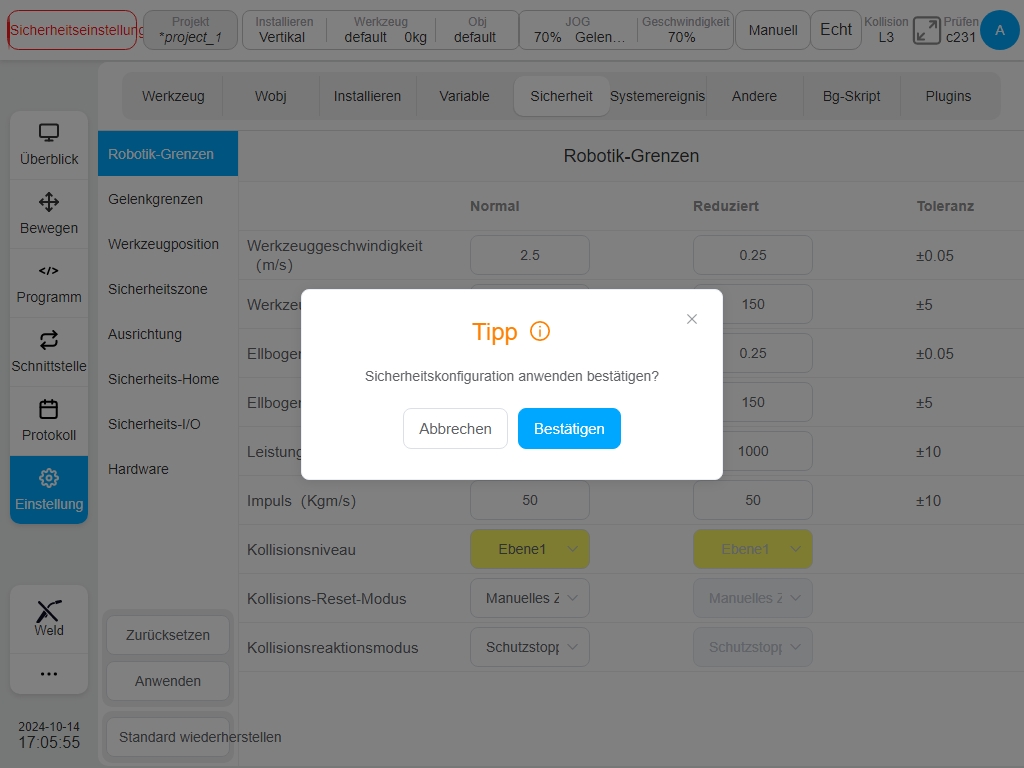
Nachdem Sie auf die Schaltfläche „Bestätigen“ geklickt haben, wird ein Aufforderungsfenster zum Laden von Sicherheitsparametern angezeigt (siehe Abbildung).
Nachdem die Sicherheitsparameter konfiguriert wurden, zeigt das System die konfigurierten Sicherheitsparameter in einem Dialogfenster an, das Sie überprüfen können. Prüfen und bestätigen Sie die folgende Abbildung. Klicken Sie auf die Schaltfläche „OK“, um die Sicherheitsparameter einzustellen. Nach erfolgreicher Konfiguration ändert sich die Sicherheitsprüfung oberhalb der Statusleiste.
Sicherheitsparameter Beschreibung#
In diesem Abschnitt werden die Parameter der Sicherheitskonfiguration des Roboters beschrieben.
Sicherheitsmodus#
Normaler Modus:Der Sicherheitsmodus ist standardmäßig aktiviert.
Reduzierungsmodus: Dieser Modus kann über den Sicherheitseingang IO aktiviert werden.
Wiederherstellungsmodus: Wenn die aktuellen Bewegungsparameter des Roboters die Sicherheitsgrenze überschreiten und der Roboter dadurch zum Stillstand kommt, wird der Wiederherstellungsmodus aktiviert und der Benutzer kann den Roboter innerhalb der Sicherheitsgrenze bewegen.
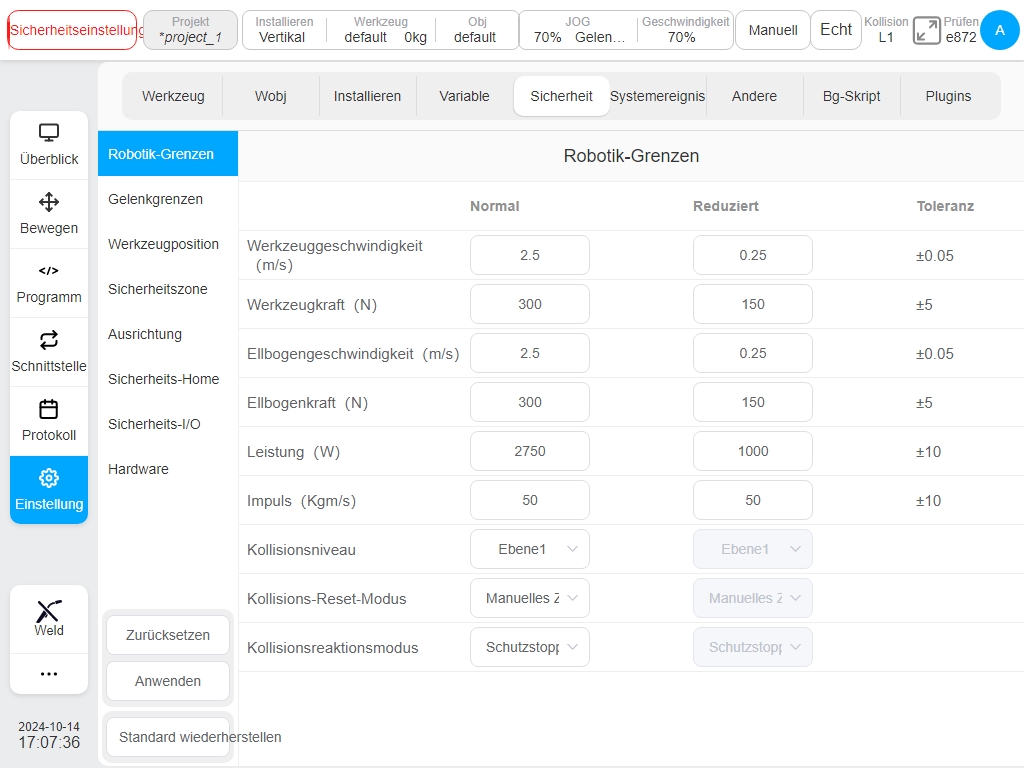
Roboter-Sicherheitsparameter#
Die Roboterparameter werden zur Begrenzung der allgemeinen Roboterbewegung verwendet. Der Benutzer kann seine Parameterwerte im Normalmodus und im Reduziermodus konfigurieren.
Maximale Endgeschwindigkeit Begrenzt die maximale Geschwindigkeit des Endes des Roboters.
Maximale Endkraft Begrenzt die maximale Kraft, die von außen auf das Ende des Roboters ausgeübt wird.
Maximale Ellbogengeschwindigkeit Begrenzt die maximale Ellbogengeschwindigkeit des Roboters.
Maximale Ellbogenkraft Begrenzt die maximale externe Kraft, die vom Ellbogen des Roboters ausgeübt wird.
Kraft Begrenzt die maximale mechanische Arbeit, die der Roboter nach außen hin verrichtet, und das Ende der Roboterlast wird als Teil des Roboterkörpers betrachtet.
Maximales Moment Begrenzt das maximale Moment der Roboterleistung und das Ende der Roboterlast wird als Teil des Roboterkörpers betrachtet.
Kollisionserkennungsstufe Empfindlichkeit des Roboters zur Erkennung von Kollisionen mit der Außenwelt, je höher die Stufe, desto höher die Empfindlichkeit.
Kollisionsrückstellungsmodus Eine Methode zur Rückstellung des Roboters nach einer Kollision.
Collision Responsive Mode Eine Methode zum Reagieren des Roboters nach einer Kollision.
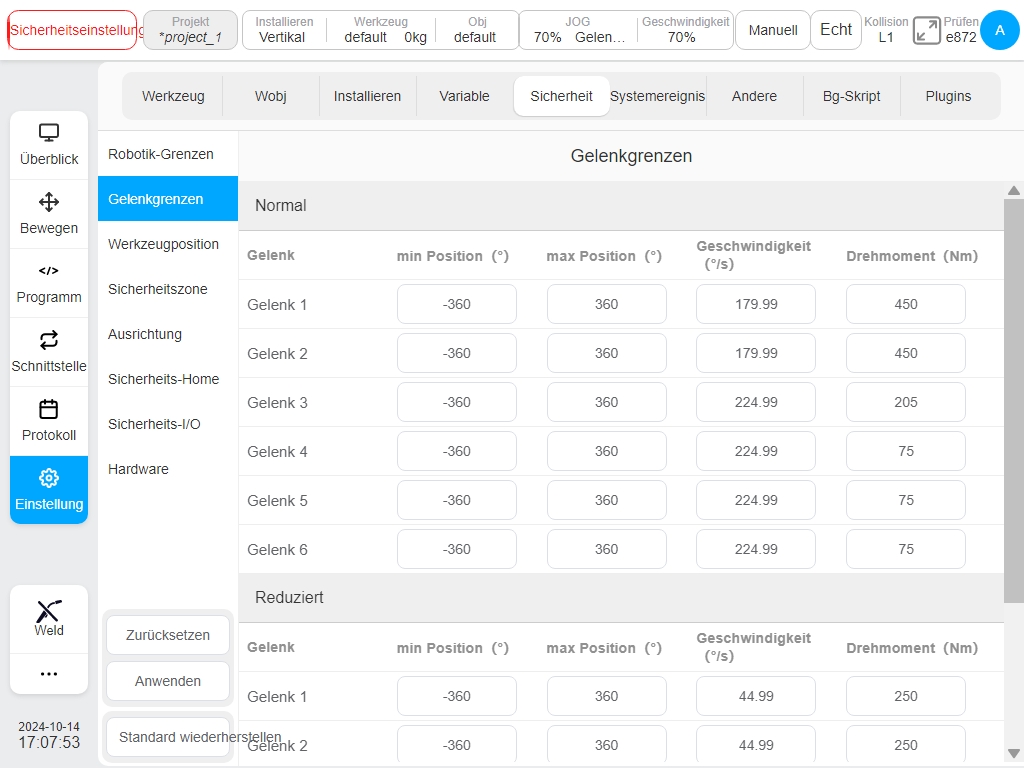
Gemeinsame Sicherheitsparameter#
Die Gelenkparameterbegrenzung wird verwendet, um den Positionsbereich, die maximale Geschwindigkeit und das maximale Drehmoment jedes Gelenks des Roboters zu begrenzen. Der Benutzer kann die Parameterwerte sowohl im Normalmodus als auch im reduzierten Modus konfigurieren.
Positionsbereich:Definiert die minimale und maximale Position jedes Gelenks.
Maximale Geschwindigkeit: Definiert die maximale Winkelgeschwindigkeit jedes Gelenks.
Maximal-Drehmoment: Definiert das maximale Drehmoment jeder Verbindung.
Sicherheits-TCP und Werkzeuge#
Das Sicherheitssystem kann drei Sätze von TCP-Offsets definieren, die, wenn sie konfiguriert sind, vom Roboter für die Geschwindigkeitsüberwachung und die Positionsüberwachung verwendet werden. Wenn eine der TCP-Positionen und Geschwindigkeiten die Sicherheitseinstellung überschreitet, wird eine Sicherheitsverletzung ausgelöst.
Bei der Geschwindigkeitsüberwachung handelt es sich um die maximale lineare Geschwindigkeit des Sicherheits-TCPs des Roboters, der in den „Sicherheitsparametern des Roboters“ im Raum zentriert ist, während die Positionsüberwachung auch als „sicherer Bereich“ bezeichnet wird. Es können drei Sicherheits-TCPs eingestellt werden, wobei es zwei Möglichkeiten gibt, die TCPs zu definieren, entweder durch Auswahl des in den globalen Variablen definierten Werkzeugkoordinatensystems oder durch Anpassung des Wertes des Eingabekoordinatensystems. Wenn ein vordefiniertes Werkzeugkoordinatensystem verwendet wird, wird das Werkzeugkoordinatensystem ausgewählt und der Wert des Werkzeugkoordinatensystems wird im Eingabefeld X, Y, Z angezeigt. Wenn die X-, Y- und Z-Werte geändert werden, wird das Koordinatensystem angepasst. Wenn der Wert des entsprechenden Koordinatensystems in der globalen Variablen geändert wird und nicht mit dem Wert des in den aktuellen Sicherheitseinstellungen verwendeten Koordinatensystems übereinstimmt, wird ein Warnsymbol ‚!‘ angezeigt. Wenn „Benutzerdefinierte Eingabedaten“ ausgewählt ist, werden die Werte von X, Y, Z, Rx, Ry, Rz und der Kugelradius der Hülle direkt bearbeitet.
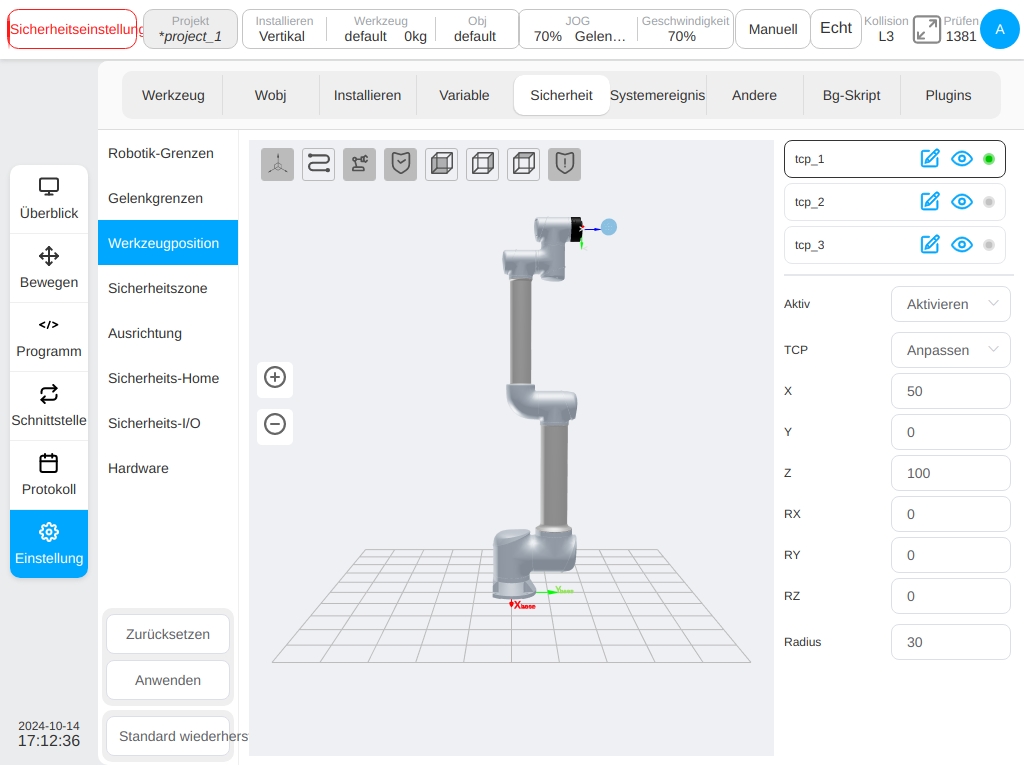
Jeder Sicherheits-TCP kann als deaktiviert, immer aktiv, Automatikmodus aktiv, Sicherheitskombination Konfiguration 1, Sicherheitskombination Konfiguration 2 insgesamt fünf verschiedene Arten von Aktivierungsbedingungen eingestellt werden. Wenn alle drei TCPs deaktiviert sind, verwendet die Sicherheitssteuerung standardmäßig ein Flanschkoordinatensystem mit einem Kugelradius von 50 mm. Der Status der TCP-Konfiguration wird in der TCP-Konfigurationsliste angezeigt. Wenn ein bestimmter TCP deaktiviert ist, wird der entsprechende Status grau angezeigt. Der konfigurierte Sicherheits-TCP kann das Koordinatensystem und die Hüllkugel im 3D-Anzeigebereich anzeigen und kann den entsprechenden TCP-Namen mit dem Symbol  ein- und ausblenden. Klicken Sie auf das Symbol neben dem TCP-Namen
ein- und ausblenden. Klicken Sie auf das Symbol neben dem TCP-Namen  , um den Standard-TCP-Namen zu ändern. Der Sicherheits-TCP, der nicht deaktiviert ist, wird angezeigt
, um den Standard-TCP-Namen zu ändern. Der Sicherheits-TCP, der nicht deaktiviert ist, wird angezeigt  . Andernfalls wird er als
. Andernfalls wird er als  angezeigt.
angezeigt.
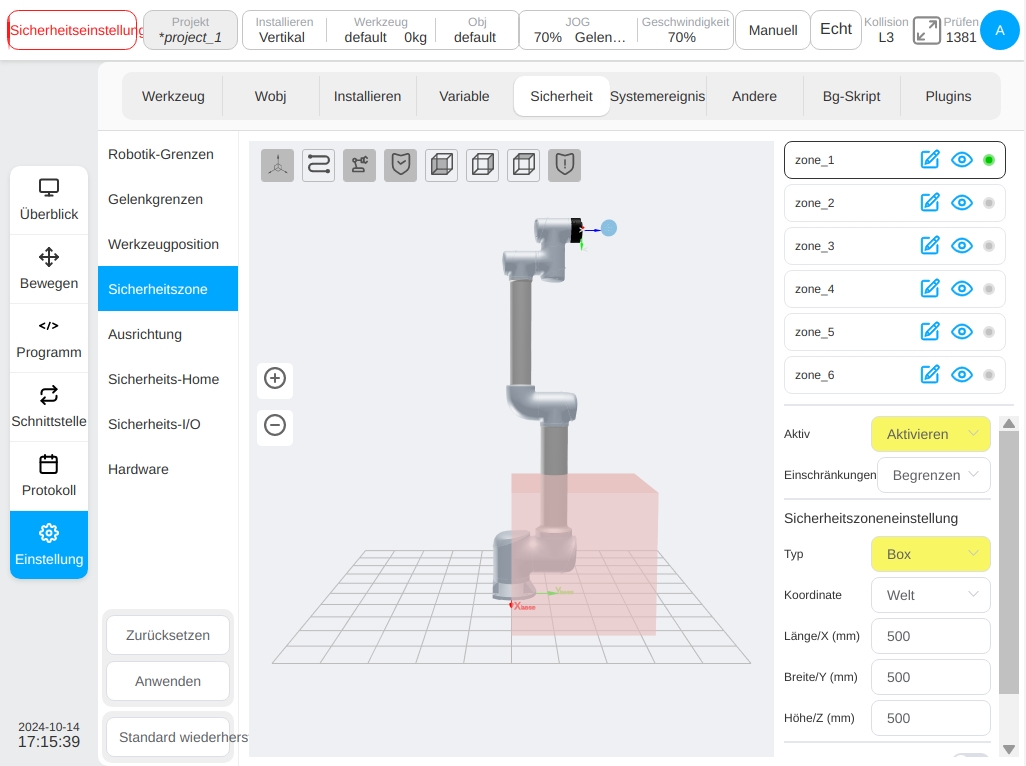
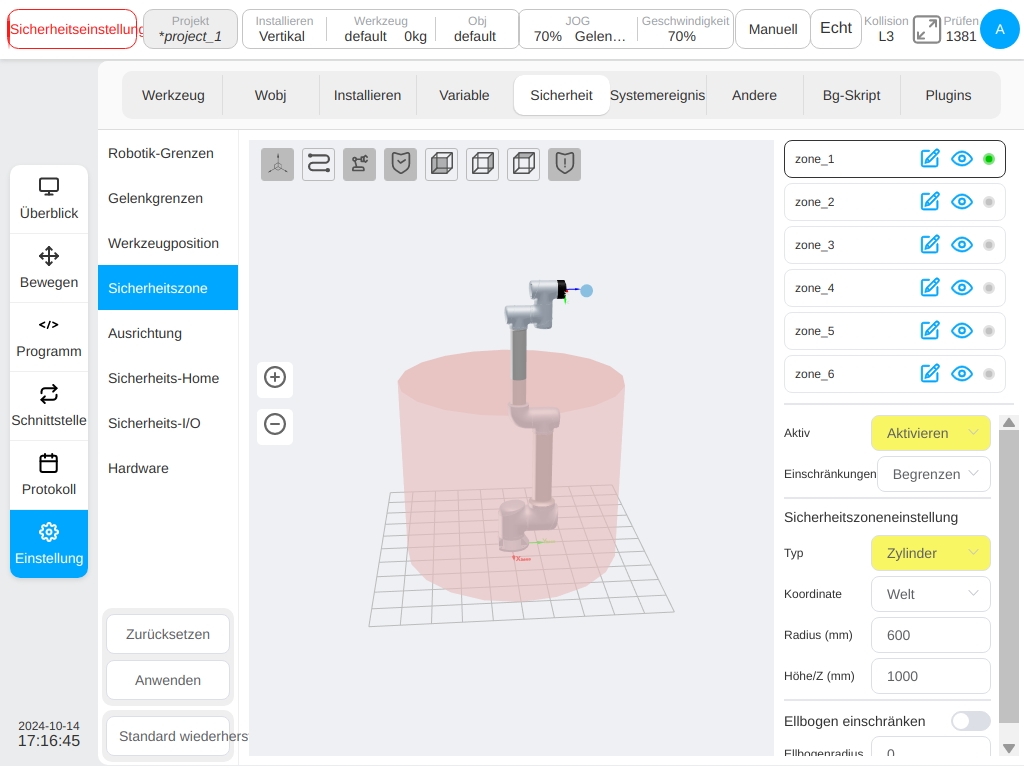
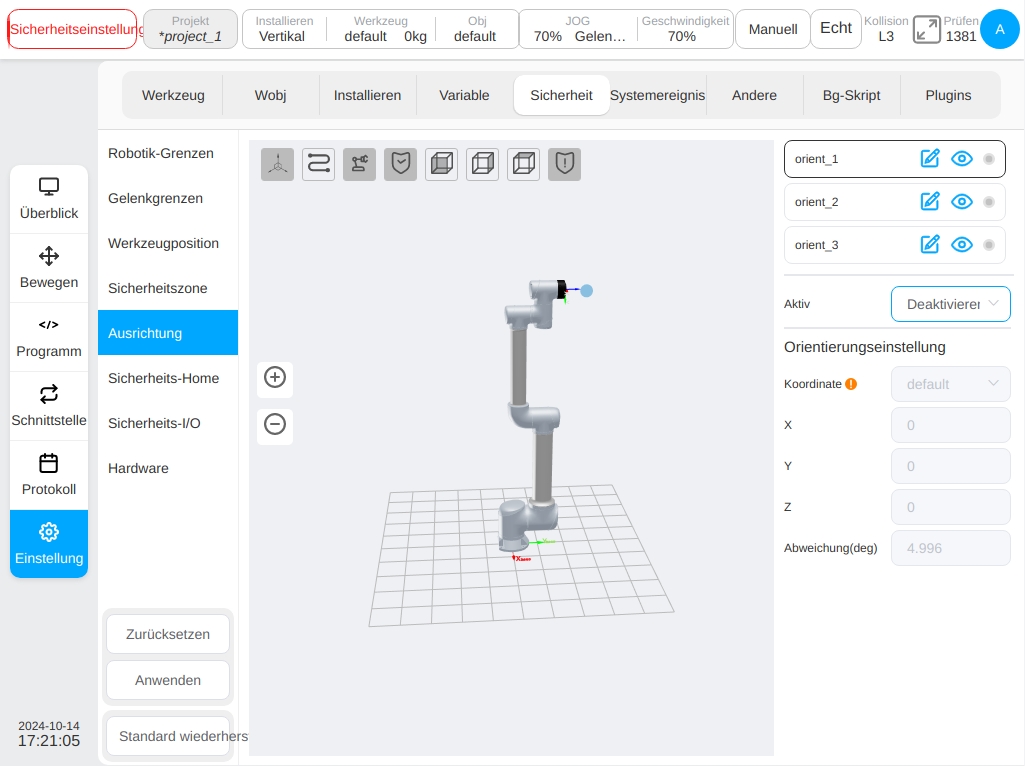
Sicherheitszone#
Zu den Definitionstypen von Sicherheitszonen gehören Ebene, Rechteck und Zylinder. Benutzer können bis zu sechs unabhängige Raumzonen einrichten. Klicken Sie auf das Symbol neben dem Sicherheitszonennamen, um die konfigurierte Sicherheitszone in der 3D-Anzeigezone ein- oder auszublenden. Und das Symbol neben dem Namen der Sicherheitszone (z. B. der Standardname zone_1) kann angeklickt werden, um den Namen zu ändern. wird angezeigt, wenn die Sicherheitszone nicht deaktiviert ist, andernfalls wird angezeigt.
Zu den Konfigurationen für die Aktivierung der Sicherheitszone gehören: Deaktiviert, Immer aktiv, Automatikmodus aktiv, Konfiguration der Sicherheitsgruppe 1 und Konfiguration der Sicherheitsgruppe 2.
Die Begrenzungsreaktion der Sicherheitszone bezieht sich auf die Reaktion des Roboters, wenn er die Sicherheitszone von außen betritt und sich von innen über die Begrenzung hinaus bewegt. Es gibt zwei Reaktionsmodi, nämlich die Begrenzung der Bewegung über die Begrenzung hinaus und das Auslösen des Reduzierungsmodus beim Betreten der Zone. Wenn die Auswahlgrenze die Begrenzung überschreitet, wird die Reaktion des Roboters, der sich über die Begrenzung hinaus bewegt, beschrieben. Wenn der Reduzierungsmodus ausgelöst wird, wird die Reaktion des Roboters beschrieben, der von außen in die Zone eindringt, und der normale Modus wird wiederhergestellt, wenn der Roboter die Zone verlässt.
Die Raumzone kann auch so eingestellt werden, dass sie Krümmungsgrenzen enthält, wobei der Raumbereich der Krümmung in Form eines kugelförmigen Radius festgelegt wird.
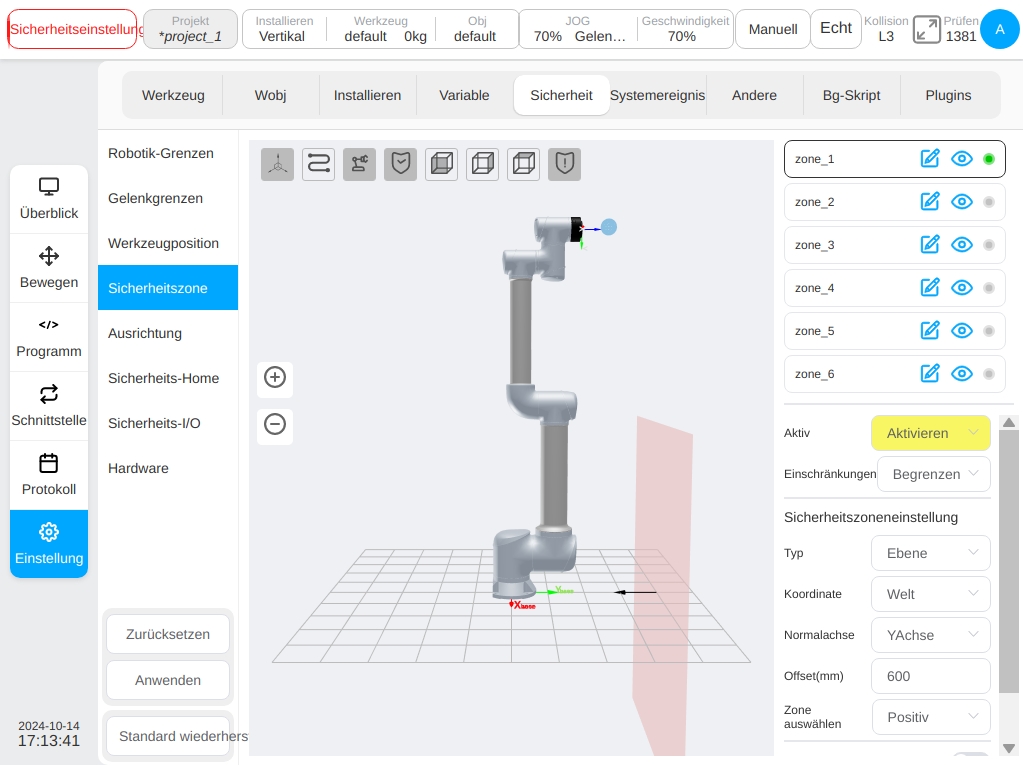
Wenn der Typ der Konfigurationszone eine Ebene ist, basiert die Referenz der ebenen Zone auf dem Weltkoordinatensystem/Basis/Werkstückkoordinatensystem und die Ebene wird durch die Einstellung der Normalen und des Normalenversatzes der Ebene bestimmt. Die Einstellungen für die Ebene können durch Auswahl einer Region wirksam gemacht werden, und die entsprechende Richtung wird durch einen schwarzen Pfeil in der 3D-Zone angezeigt.
Wenn der Konfigurationszonentyp Raumquader ist, basiert die Einstellungsbasis des Quaders auf dem Weltkoordinatensystem/Basis/Werkstückkoordinatensystem und das Werkstückkoordinatensystem wird als Eckpunkt des Quaders verwendet, wobei die drei Koordinatenachsenrichtungen jeweils der Länge (X), Breite (Y) und Höhe (Z) entsprechen. Die Länge, Breite und Höhe reicht von -3000mm bis 3000mm.
Wenn der Konfigurationszonentyp ein Raumzylinder ist, basiert die Einstellreferenz auf dem Weltkoordinatensystem/Basis/Werkstückkoordinatensystem mit dem Werkstückkoordinatensystem als Mittelpunkt der Kreisebene, die Z-Richtung zeigt in die Höhenrichtung, und der Radius und die Höhe können eingestellt werden. Der Radius reicht von 0 bis 3000mm, die Höhe von -3000mm bis 3000mm.
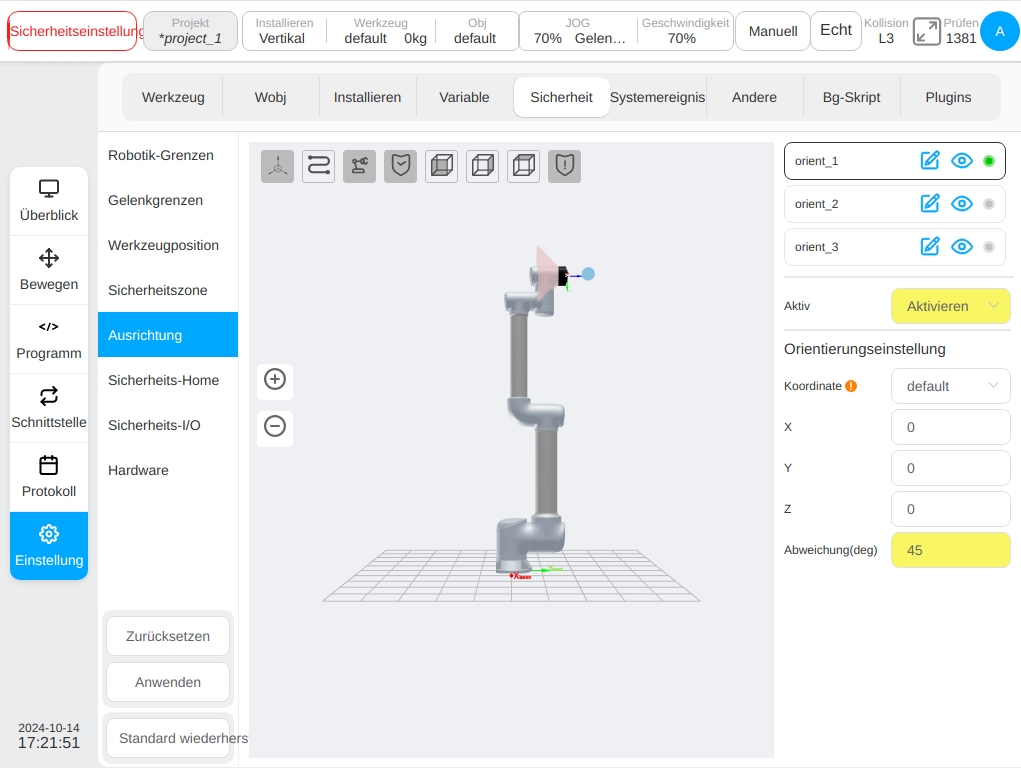
Sicherheitshaltungszone#
Die Einstellung des sicheren Haltungsbereichs. Der Haltungsbereich bezieht sich auf die Bildung eines Kegelwinkels um einen Richtungsvektor im Basiskoordinatensystem des Roboters. Die Haltungsbeschränkung beschränkt nur die Z-Achse des Roboter-TCP auf den Haltungsbereich. Benutzer können bis zu drei Haltungszonen einrichten. Eine einzelne Haltungszone kann durch Anklicken des Symbols neben dem Namen auf der rechten Seite der Haltungszone ein- oder ausgeblendet werden, das standardmäßig auf Anzeige eingestellt ist. Das Symbol hinter dem Namen kann angeklickt werden, um den Namen der Haltungszone zu ändern. wird angezeigt, wenn der Haltungsbereich nicht deaktiviert ist, andernfalls ist deaktiviert.
Die Sicherheitszone kann in fünf Modi aktiviert werden: Deaktiviert, Immer aktiv, Automatikmodus aktiv, Sicherheitsgruppe Konfiguration 1 und Sicherheitsgruppe Konfiguration 2. Die Sicherheitszone unterscheidet sich von der Sicherheitszone dadurch, dass nur die Z-Achsenrichtung des TCP eingeschränkt ist und es nur einen Reaktionsmodus gibt, der den Schutzhalt nach Überschreiten der Zone auslöst.
Es gibt drei Möglichkeiten, ein Referenz-Koordinatensystem für die Sicherheits-Haltungszone zu definieren: Benutzerdefiniert, Erfassung der aktuellen TCP-Position und Definition durch ein vordefiniertes Werkstückkoordinatensystem. Bei Auswahl von Benutzerdefiniert wird der Wert des Richtungsvektors X, Y, Z, der den Wert im Roboter-Basiskoordinatensystem beschreibt, manuell geändert; Bei Auswahl der aktuellen TCP-Lage wird die Z-Achsenrichtung des aktuellen TCP als Referenzrichtung der Haltungszone genommen und die Richtung wird in das Roboter-Basiskoordinatensystem umgewandelt, um die Vektorrichtung X, Vektorrichtung Y, Vektorrichtung Z zu beschreiben. Wenn durch das Werkstückkoordinatensystem definiert, wird die Richtung der Z-Achse des Werkstückkoordinatensystems als Referenzrichtung der Haltungszone genommen und in das Roboter-Basiskoordinatensystem umgewandelt, der Wert wird nach manueller Änderung in einen benutzerdefinierten Modus geändert.
Wenn die Orientierung des Werkstückkoordinatensystems von außen verändert wurde, wird am Referenzkoordinatensystem ein Erinnerungssymbol angezeigt. Der Winkel der Zonenabweichung reicht von 5 bis 180 Grad. Zum Beispiel:
Sicherheit zu Hause#
Bei den „Safety Home“-Einstellungen synchronisiert die „Safety Home“-Überwachung die Einstellungen für den Heimatort auf der Seite „Andere“. Wenn sich der Standort in den „Safety Home“-Einstellungen von dem Heimatort in den „Other“-Einstellungen unterscheidet, wird unter „Synchronize Home“-Einstellungen ein Erinnerungssymbol angezeigt. Wenn die Einstellungen nicht synchronisiert werden, unterliegt die Home-Position des Systems den Sicherheitseinstellungen. Die Einstellungen der Sicherheitssteuerung gelten für den Home-Punkt ‚Press Home‘ auf der mobilen Schnittstelle und für die Ausgabe von Home-Signalen von anderen Ports (z.B. Port 2001) des Roboters. Der Home-Point auf der Einstellungsseite „Andere“ dient nur als Aufzeichnung und nicht als Grundlage für die Beurteilung des Home-Points. Die Überwachungsschwelle des Home-Points kann eingestellt werden, der Wert liegt zwischen 1 und 5°.
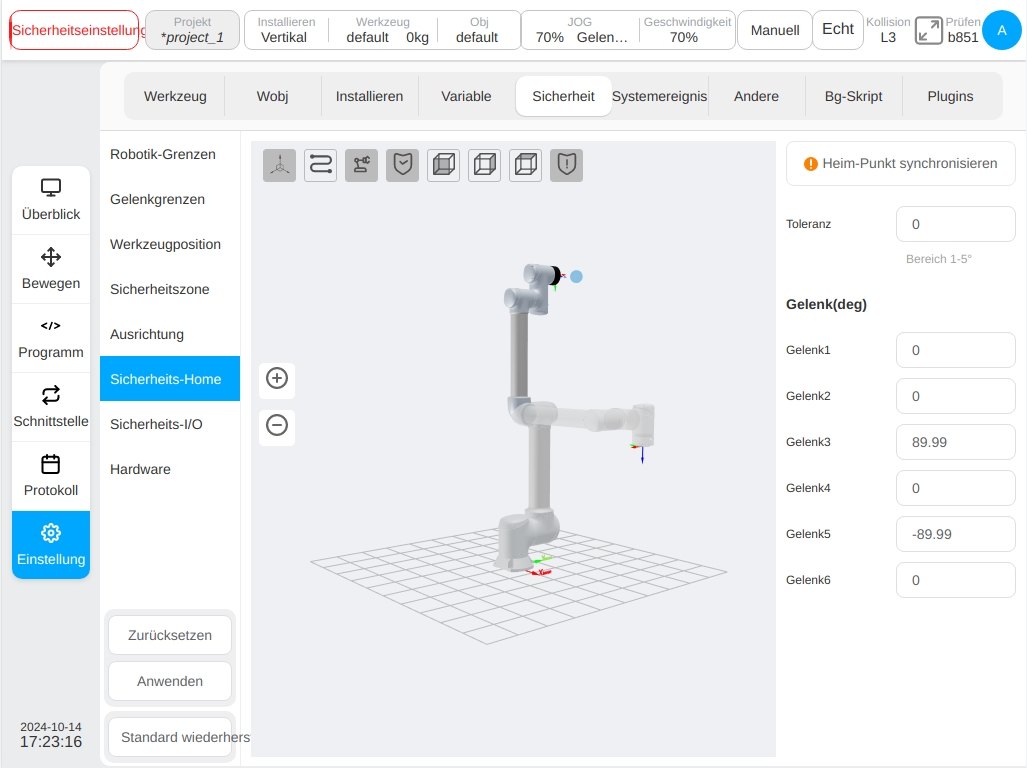
Wenn die Synchronisierung der Ausgangsposition ausgewählt wird, wird der Gelenkwinkel der Ausgangsposition angezeigt. Und das Robotermodell im 3D-Modellanzeigebereich wird an der entsprechenden Position aktualisiert.
Wenn die Sicherheitsheimfahrt eingestellt und der Ausgang Heimfahrt in der Sicherheits-E/A konfiguriert ist (siehe Abschnitt 6.2.3.8), befinden sich alle Gelenkwinkel des Roboters innerhalb des eingestellten Heimfahrtbereichs (Sollwert-Schwellenwert, Sollwert + Schwellenwert) und die Geschwindigkeit liegt nahe bei 0°/s (um den normalen Encoder-Rundlauf herauszufiltern). Die vom System voreingestellte Gelenkgeschwindigkeit ist kleiner als 2°/s) und dauert 500 Millisekunden (vom System vorgegeben und nicht konfigurierbar), da das Signal vom Sicherheitsausgang externer Ausgang Referenzpunkt erreicht wird.
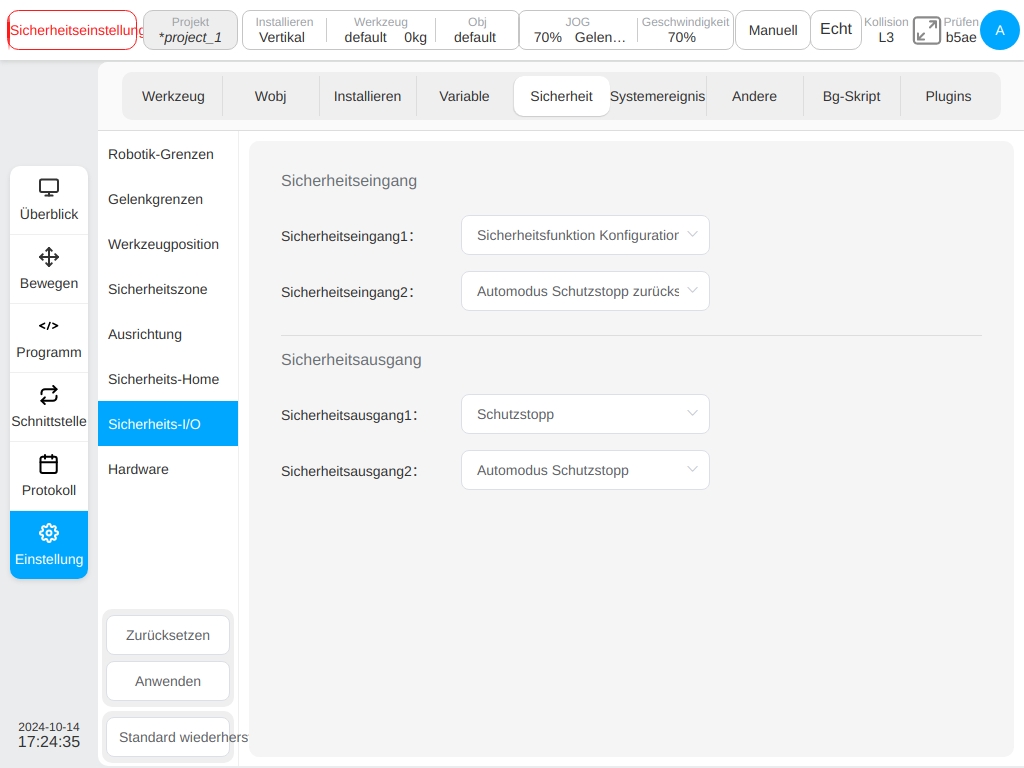
Sicherheit IO#
Das Sicherheits-E/A-Modul enthält zwei konfigurierbare Sicherheits-Eingangsanschlüsse und zwei konfigurierbare Sicherheits-Ausgangsanschlüsse.
Zu den Sicherheitsmerkmalen gehören:
Schutz-Reset-Eingang: Wenn der Schutzstopp eintritt, wird der Anschluss ausgelöst und der Roboter kehrt in den Normalzustand zurück.
Eingang für Schutzhalt im Automatikmodus: Nach der Konfiguration führt der Roboter, wenn er den Anschluss im Automatikmodus auslöst, einen Schutzhalt durch.
Automatischer Schutzmodus-Reset-Eingang: Wenn der automatische Schutzmodus gestoppt wird, wird der Anschluss ausgelöst und der Roboter kehrt in den Normalzustand zurück.
Reduzierungsmodus-Eingang: Nach der Konfiguration wird dieser Anschluss ausgelöst und der Roboter geht in den Reduzierungsmodus über. Der Roboter wird langsamer, wenn die Parametergrenzen die Sicherheitsparameter im reduzierten Modus erfüllen.
Sicherheitskombination Konfiguration 1/2:Wenn der Anschluss der Sicherheitskombination Konfiguration 1 oder der Sicherheitskombination Konfiguration 2 ausgelöst wird, werden alle in der Sicherheitskombination Konfiguration 1 oder der Sicherheitskombination Konfiguration 2 konfigurierten Sicherheitsmerkmale, einschließlich Sicherheitswerkzeuge, Sicherheitszonen und Sicherheitsbereiche, aktiviert und überwacht.
Zu den Sicherheitsfunktionen gehören:
Schutzhalt-Ausgang: Dieser Anschluss wird ausgelöst, wenn sich der Roboter im Schutzhalt-Zustand befindet.
Automatikmodus-Schutzstop-Ausgang: Dieser Anschluss wird ausgelöst, wenn sich der Roboter im Automatikmodus-Schutzstop befindet.
Ausgang Reduziermodus: Dieser Anschluss wird ausgelöst, wenn sich der Roboter im Reduziermodus befindet.
HOME Location: Dieser Anschluss wird ausgelöst, wenn sich der Roboter in der Nähe der sicheren Home-Position befindet;
Hardware#
Umfasst externe IO, die für die Modusumschaltung aktiviert sind, und drei Positionsfreigabeeingänge
Externes IO für Modusumschaltung aktivieren: Wenn dieser Punkt aktiviert ist, kann die manuelle Modusumschaltung über das externe IO erfolgen. Die Modusumschaltfunktion in der Statusleiste der Schnittstelle ist ungültig.
Eingang zur Freigabe der drei Positionen: Wenn diese Funktion aktiviert ist, kann der Roboter im manuellen Modus nur bewegt werden, wenn sich der Drei-Positionen-Schalter am Programmierhandgerät in der mittleren Position befindet. Wenn sich der Dreistellungsschalter zu irgendeinem Zeitpunkt während der Bewegung des Roboters nicht in der Mittelstellung befindet, wird der Roboter angehalten.