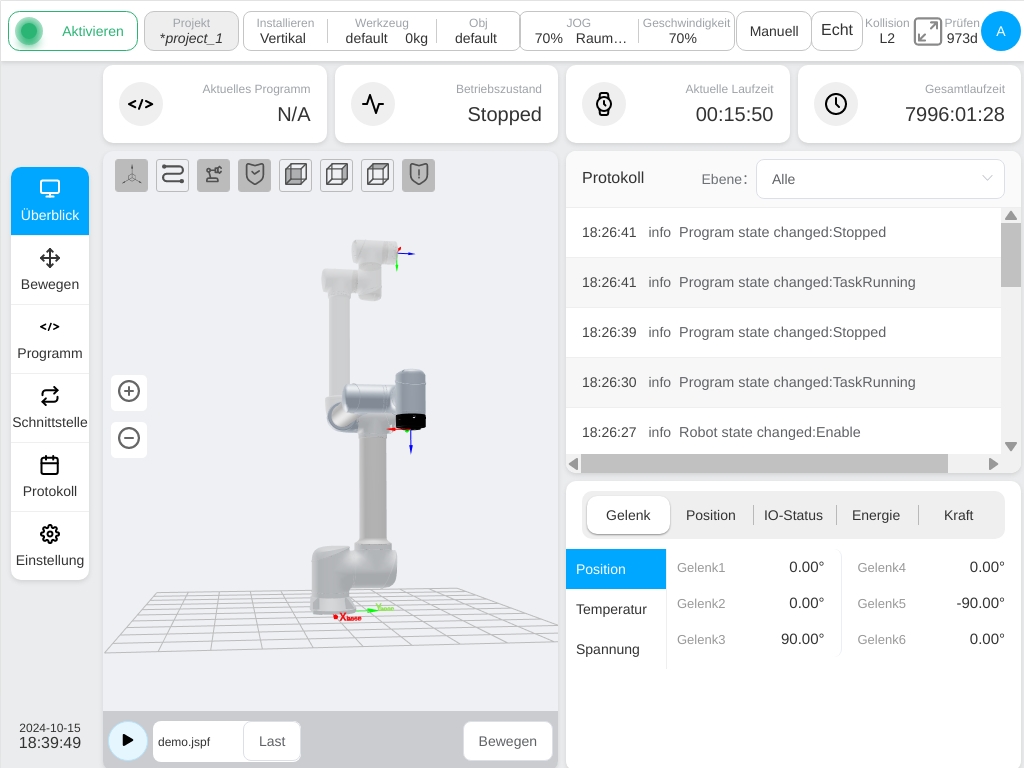
Übersichtsseite#
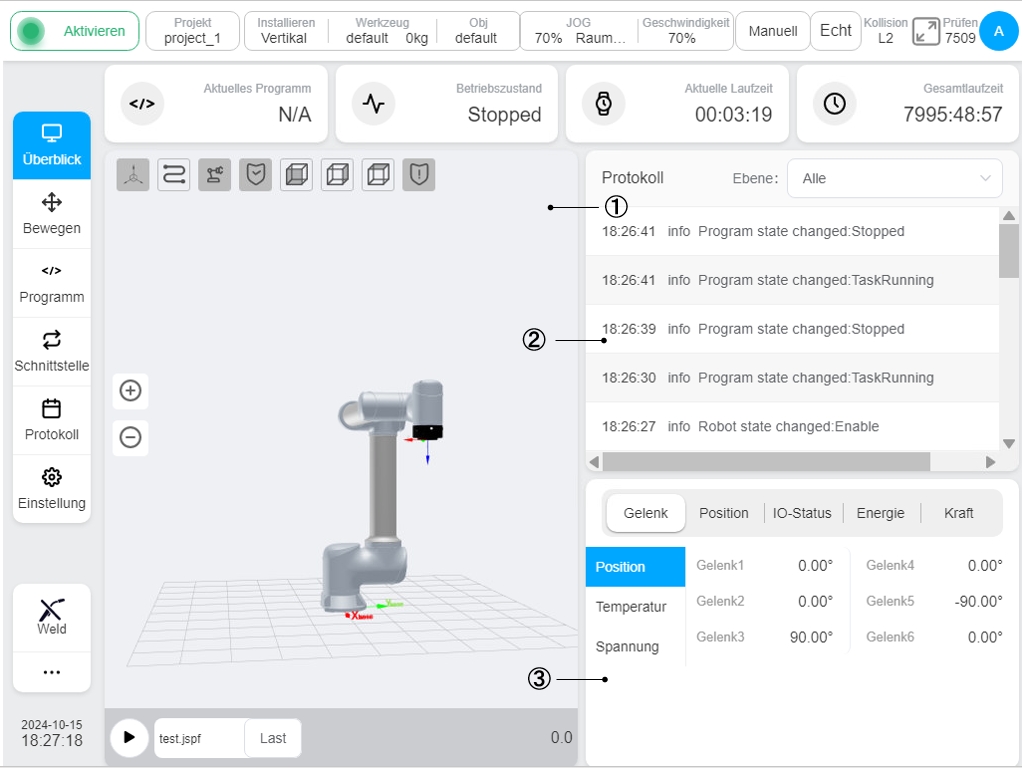
Durch Anklicken der Schaltfläche „Übersicht“ in der Navigationsleiste gelangt der Benutzer zur Übersichtsseite, wie in der Abbildung dargestellt. Oben im Inhaltsbereich der Seite werden angezeigt: das aktuell laufende Programm, der Programmstatus, die aktuelle Laufzeit und die gesamte Maschinenlaufzeit. Auf der linken Seite der Seite ① wird das 3D-Simulationsmodell angezeigt; oben rechts ② werden die Protokollinformationen angezeigt, und das Protokoll kann durch Auswahl von fünf verschiedenen Ebenen angezeigt werden: Alle, Fatal, Fehler, Warnung und Information über das Dropdown-Feld; auf der unteren rechten Seite zeigt ③ die Informationen über die Gelenke des Roboters (Position/Temperatur/Spannung), die räumliche Position (im Basiskoordinatensystem), den Status der IOs, die Informationen über die Stromversorgung (im Schaltschrank) und die Kraftinformationen.
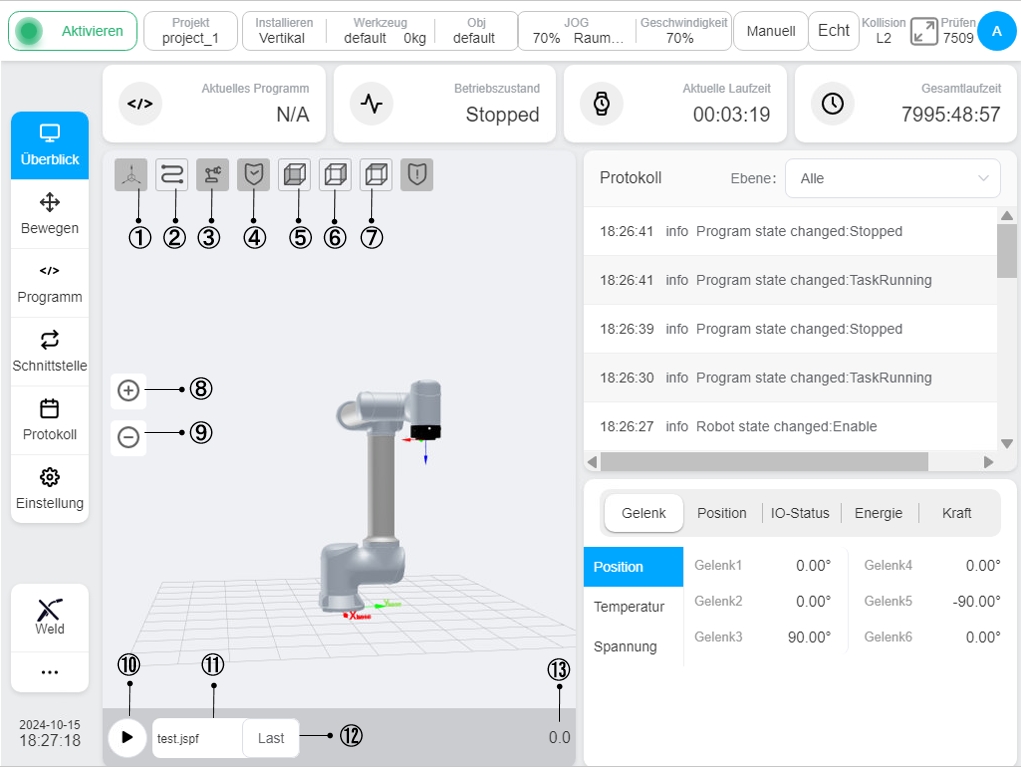
Die Symbole ① - ⑦ oben links zeigen an, ob das Werkstückkoordinatensystem und das Werkzeugkoordinatensystem, die Endbahn, das 3D-Simulationsmodell des Roboters, die Sicherheitszone, die Vorderansicht, die rechte Ansicht und die Draufsicht angezeigt werden sollen (siehe Abbildung). Die Symbole ⑧ und ⑨ sind Schaltflächen für die Vergrößerung bzw. Verkleinerung des 3D-Modells. Die Symbole ⑩ - ⑬ sind die Schaltfläche für die Programmausführung, das Anzeigefeld für das aktuell laufende Programm, die Schaltfläche zum Laden des Programms bzw. die Anzeige der Programmlaufzeit.
Klicken Sie auf die Schaltfläche „Laden“, und die Programmliste wird angezeigt, wie in der Abbildung dargestellt. In der Programmliste sind alle Ordner (z. B. Test_1) und Programmdateien mit der Erweiterung.jspf (z. B. ee.jspf) aufgeführt. Am unteren Rand des Bildschirms befinden sich drei Schaltflächen: Zurück zur oberen Ebene, Abbrechen und Auswählen.
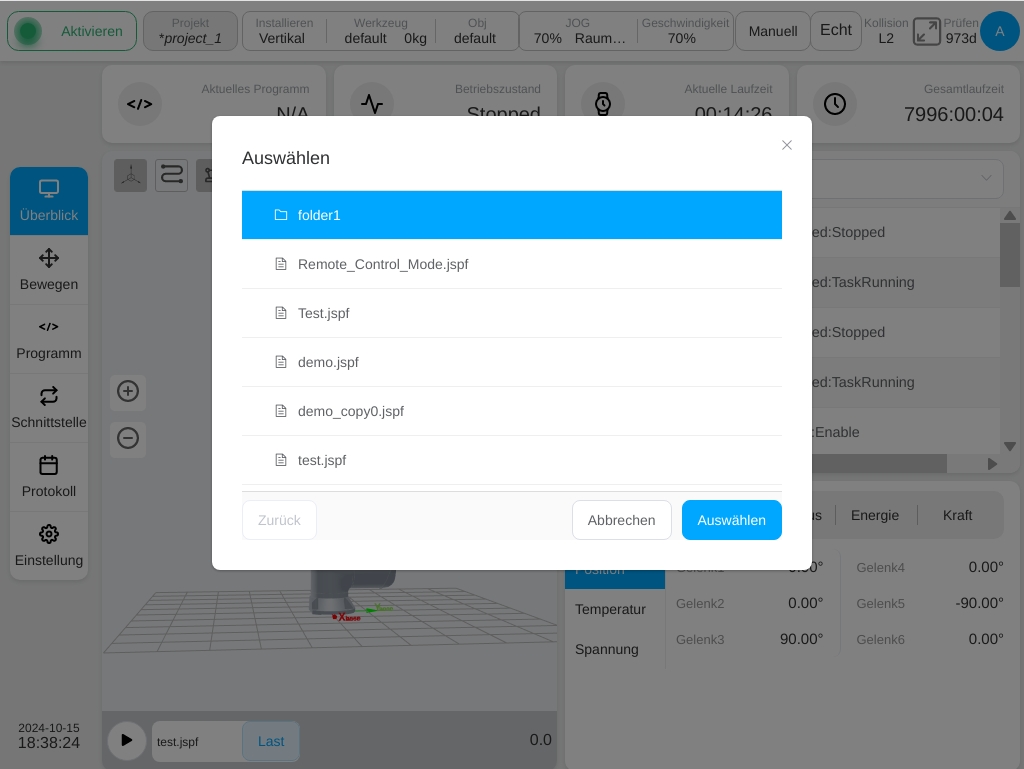
Wählen Sie die zu ladende und auszuführende Programmdatei aus, klicken Sie auf die Schaltfläche „Auswählen“ auf der Benutzeroberfläche, die Programmliste wird automatisch ausgeblendet, während die Symbolanzeige den Dateinamen der ausgewählten Programmdatei oder den Dateinamen mit „…/“ anzeigt. Der Dateiname der ausgewählten Programmdatei oder der Dateiname mit ‚…/‘ (es gibt verschachtelte Ordner, z. B. …/4560.jspf) wird auf dem Symbol angezeigt. Wenn das Programm mit einem „Start“-Funktionsblock gestartet wird, erscheint nach einem Klick auf die Schaltfläche „Ausführen“ mit der Schaltfläche „Bewegen halten“ das graue perspektivische 3D-Modell (im Folgenden als graues 3D-Modell bezeichnet), wie in der Abbildung dargestellt. Wenn Sie die Schaltfläche „Bewegen halten“ drücken und gedrückt halten, bewegt sich der Roboter in die im Programm festgelegte Ausgangsposition, d. h. das graue perspektivische 3D-Modell. Wenn der Roboter das ausgegraute 3D-Modell erreicht hat, verschwindet die Schaltfläche „Bewegung gedrückt halten“. Klicken Sie an diesem Punkt erneut auf die Schaltfläche „Ausführen“, um das Programm zu starten.