システム概要#
プロジェクト管理#
システムはマルチプロジェクト管理をサポートし、プロジェクトデータはロボットプログラム、プロジェクトグローバル変数、プロジェクト設定とその他の情報を含む。システムがロードを開始すると、システム設定に従って現在のプロジェクトデータがロードされます。他のプロジェクトデータは現在のプロジェクトでは使用できません。
Caution
インターフェイスページの設定、設定ページの設定など、すべてのプロジェクトデータは、次の起動時に正しく読み込まれるように、プロジェクト設定後に保存する必要があります。
ユーザー管理#
システムはマルチユーザー管理をサポートしている。ユーザー権限は、オペレーター、プログラマー、メンテナー、管理者として定義されている。具体的な権限は以下の通りである:
オペレータ
プロジェクトの選択、プログラムの実行、プログラムの手動ジョグ、ロボットの状態の表示などが可能です
プログラマ
オペレータのユーザー権限
ロボット プログラムのプログラミング、プロジェクトの構成
デフォルトのユーザー名は default で、初期パスワードは 123 です
メンテナー
オペレータのユーザー権限
システム更新
管理者
メンテナーのユーザー権限
ユーザー管理
ユーザー名は admin で、初期パスワードは 123 です
ユーザーページの概要#
図に示すように、全体のインターフェイスは主に3つの部分に分かれています:ヘッドステータスバー、左ナビゲーションバー、右コンテンツエリア。コンテンツエリアは、左ナビゲーションバーの異なる選択に基づいて、異なるコンテンツ(サブページ)を表示します。ナビゲーションバーの下には、プラグインエントリーとシステムの日付と時間が表示されます。

ステータスバーに表示される主な情報は、ロボット関節状態表示灯、状態表示、現在のプロジェクト、ロボット設置方向、現在のツール座標系とワーク座標系に関する情報、速度パーセンテージ、動作モード、衝突検出設定情報、安全チェックコード、ユーザー情報などである。
ナビゲーションバーには、「ダッシュボード」、「移動」、「プログラム」、「インターフェイス」、「ログ」、「設定」の6つのアイコンがあります。ナビゲーションバーのアイコンをクリックすると、コンテンツエリアに表示される内容が切り替わります。各ページの主な内容は以下の通りです:
オーバービュー・ページはプロダクション・ビュー・ページで、実行するプログラムを選択し、プログラムのステータス、システムの実行時間、システム・ログ、ジョイント・ポジションなどの基本情報を表示する。

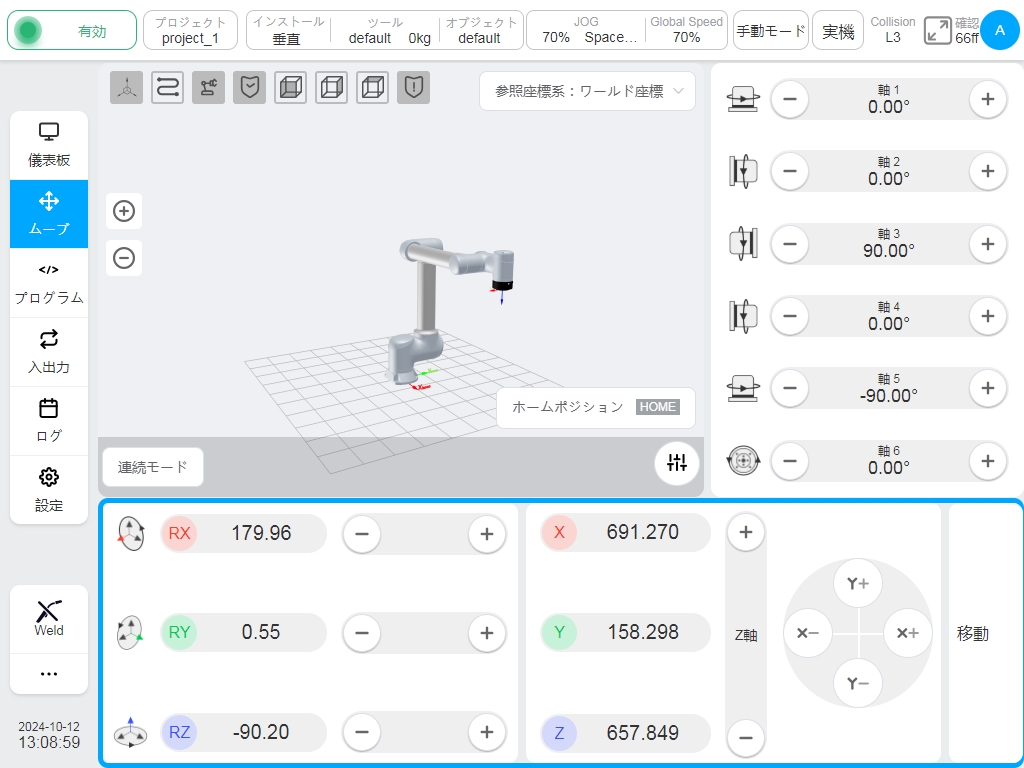
ムーブインターフェースにより、ユーザーはロボットを手動で操作し、座標系を設定し、手動移動の移動モードを設定することができる。
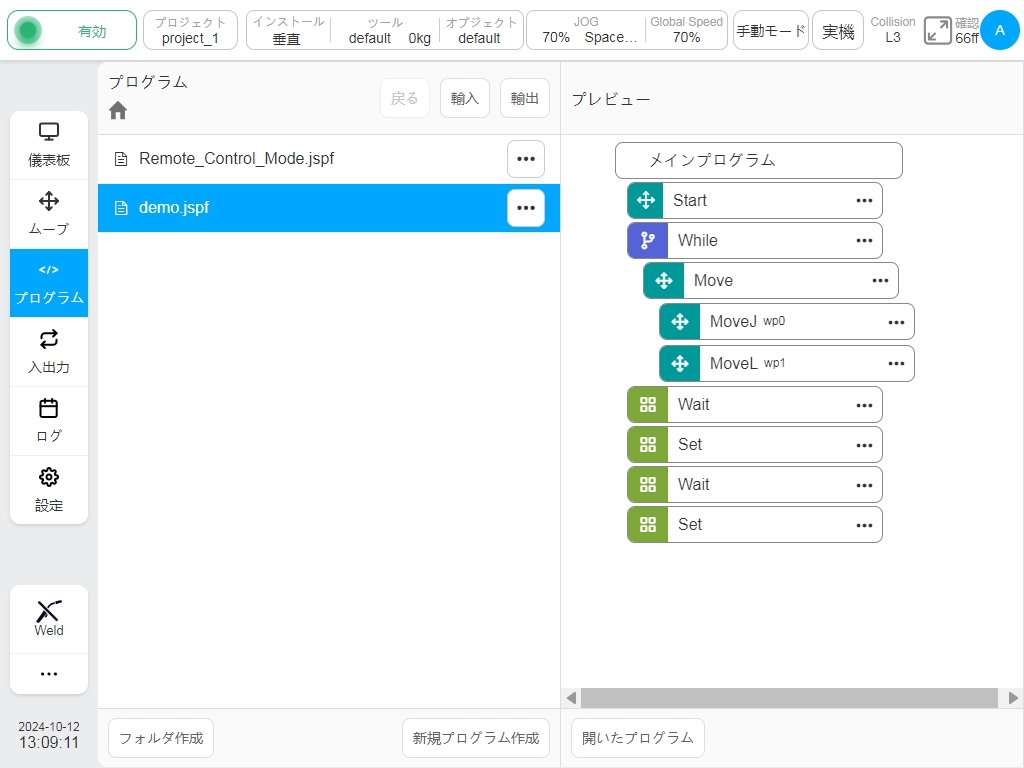
プログラムインターフェイスはロボットのメインプログラミングページで、ユーザーはプロジェクト内のプログラムファイルを管理したり、提供されるグラフィカルプログラミング環境を通してロボットタスクを書き込むことができます。
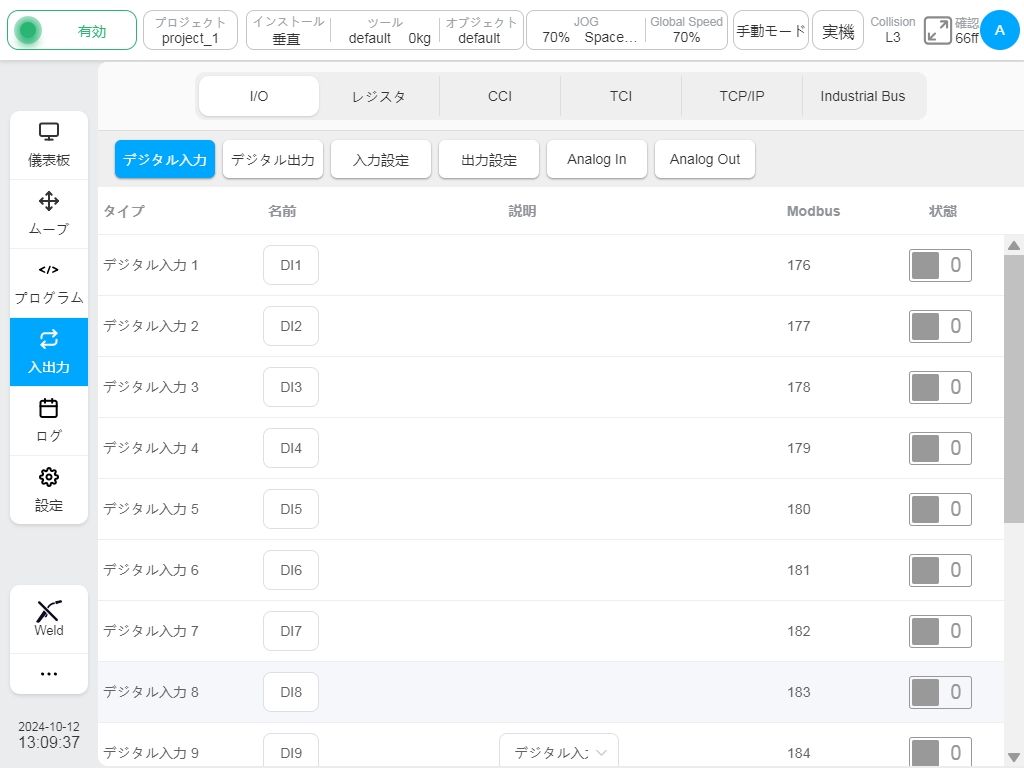
インターフェースページでは、デジタル入出力、アナログ入出力、TCP/IPインターフェース、その他の産業用フィールドバスインターフェースなど、ロボットのすべての外部インターフェースを設定することができます。
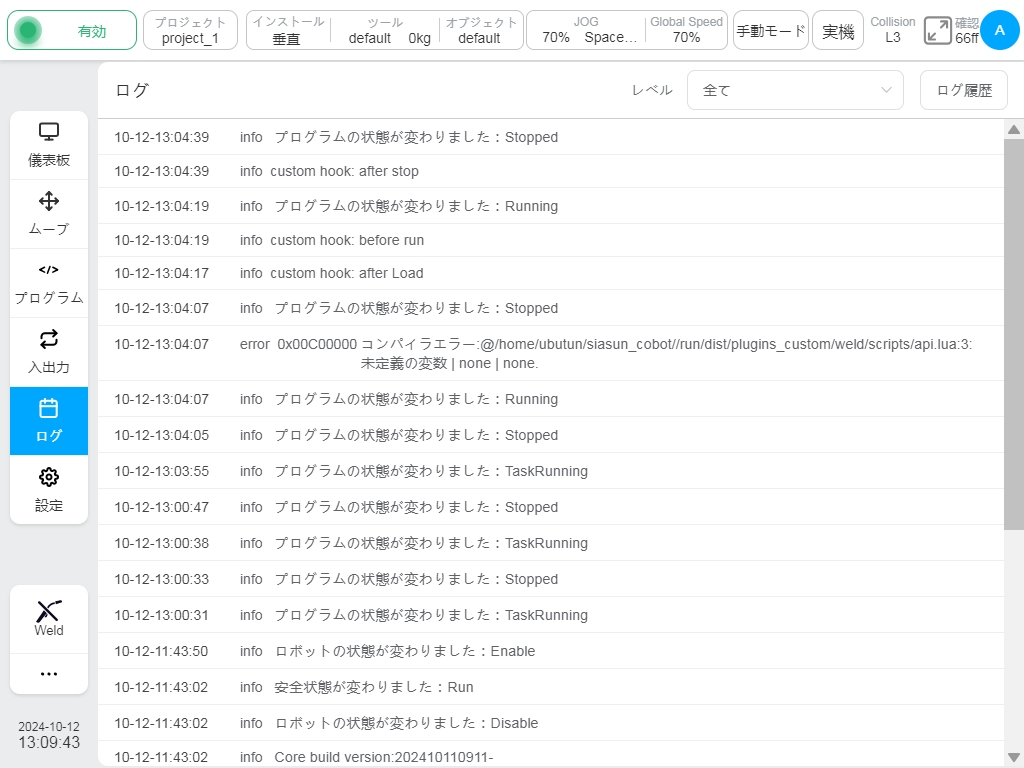
ログページには、このスタートアップからのシステムログ情報が表示されます。
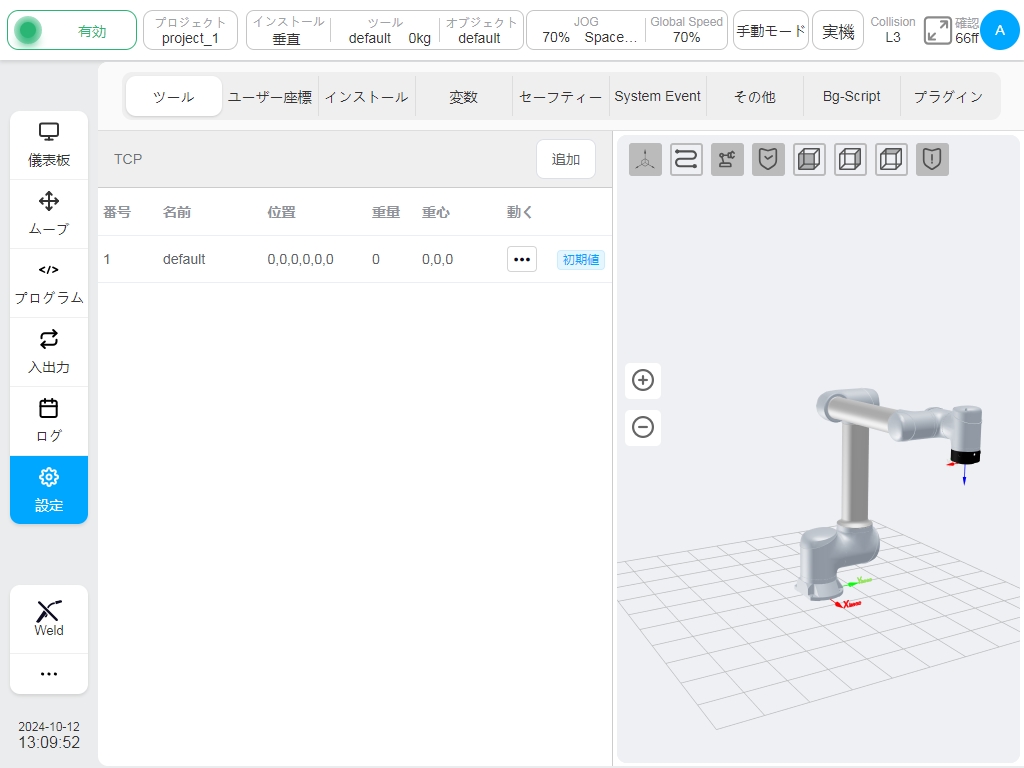
設定ページには、座標系設定、設置方向設定、安全設定を含む、現在のプロジェクト構成設定が含まれています。
多端子接続#
システムは複数の端末を同時に接続することをサポートするが、制御権を持ち、プログラム操作やシステム設定などのすべての機能を実行できるのは1つの端末のみである。他の端末は、ロボットの実行や設定の変更にアクセスできない見渡し権限のみを持っています。制御権限のない端末を以下に示す:
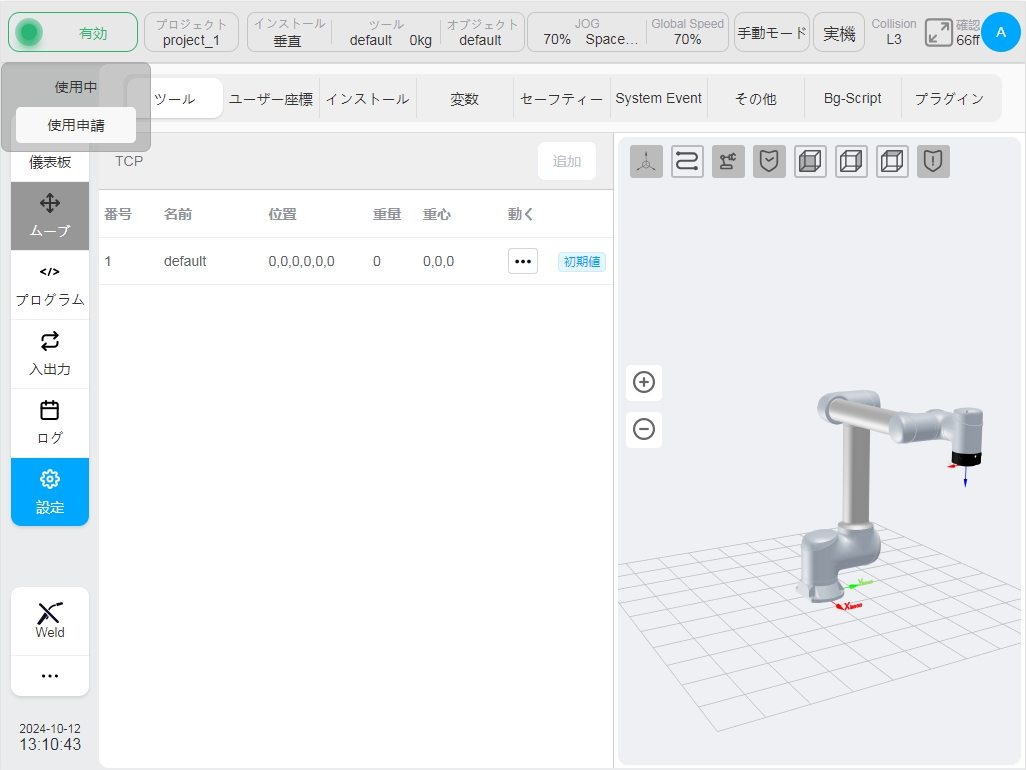
他の端末が制御を取得したい場合, 左上の「制御を取得」ボタンをクリックして許可を求める.以下のようなダイアログボックスが表示されるので、「OK」ボタンをクリックしてシステムの制御権を取得すると、前の端末の制御権は失われます。

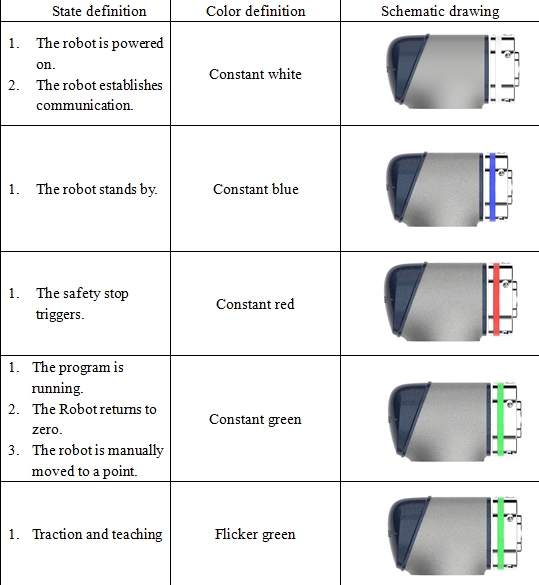
インジケーター付きエンドライト#