安全設定#
このセクションでは、セーフティコンフィグレーションの表示とアプリケーショ ンのセーフティコンフィグレーションの変更方法について説明します。現在、セーフティコントローラには DC30 制御盤用の DucoSafetyV1.0 と DC00 / DC15S / DC30D 制御盤用の DucoSafetyV2.0 の 2 種類があります。DucoSafetyV2.0 は DC00 / DC15S/ DC30D 制御盤に適合します。
デュコセーフティ V1.0#
セーフティコンフィギュレーションを見る#
ステータスバーの「Safety Verification」ボタンをクリックします。以下のダイアログボックスが表示され、現在アクティブになっている 安全構成パラメータが表示されます。
ユーザーは、安全設定ページで安全設定パラメータを表示することもできます。

セーフティ・コンフィギュレーション変更申請#
安全設定を変更する前に、パスワードを使ってアカウントのロックを解除する必要があります。安全設定の設定ページに入り、左下の「Unlock」ボタンをクリックすると、ロボットの電源がオフのときだけロックが解除されます。パスワード (現在のユーザのログインパスワード) を入力すると、認証が完了した後に安全パラメータ設定モードに入る。ステータスバーのステータスエリアが Safety Parameter Settings と表示される。

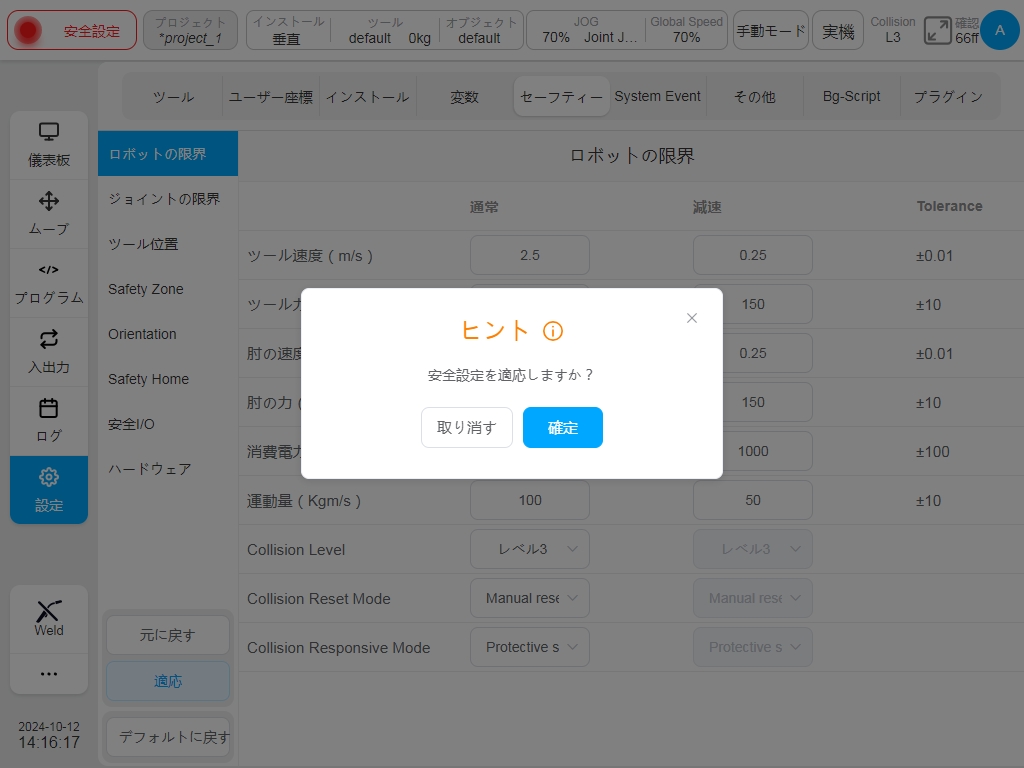
設定を変更すると、変更箇所が黄色くハイライトされます。すべての変更は、’Apply Settings’ ボタンをクリックして初めて有効になります。Restore Default Settings’ ボタンをクリックすると、すべての安全パ ラメータがデフォルト設定にリストアされます。Apply Settings’ ボタンをクリックすると、図のようなプロンプトボッ クスがポップアップ表示されます。
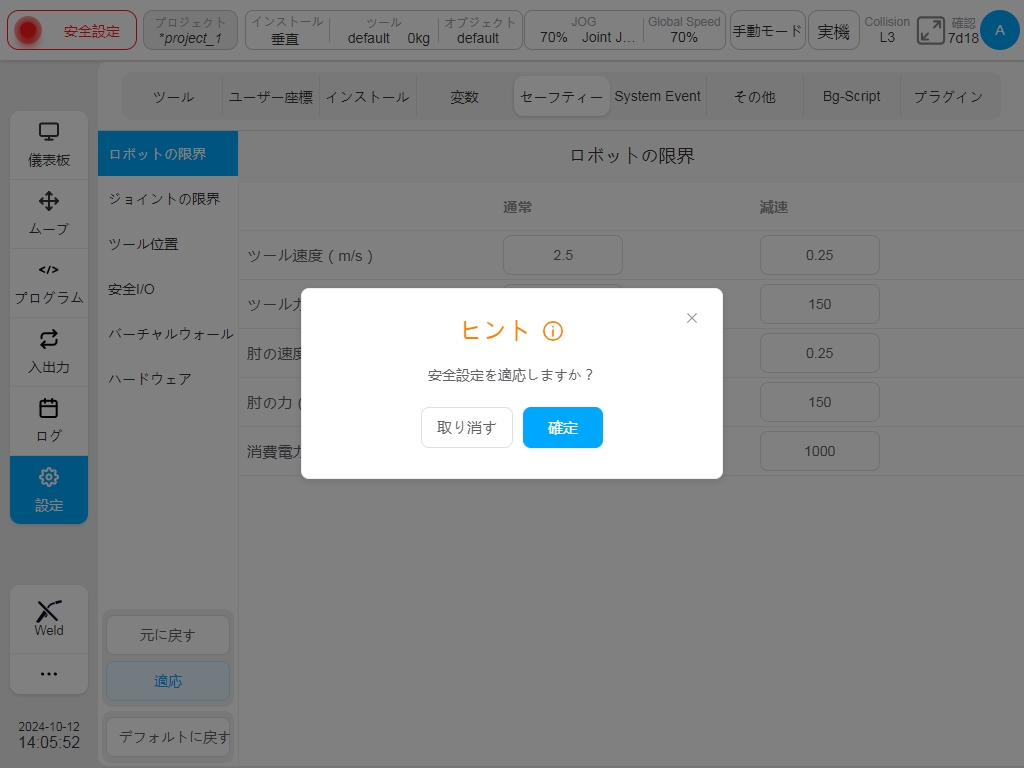
Confirm」ボタンをクリックすると、図のように安全パラメータをロードするためのプロンプトボックスが表示されます。
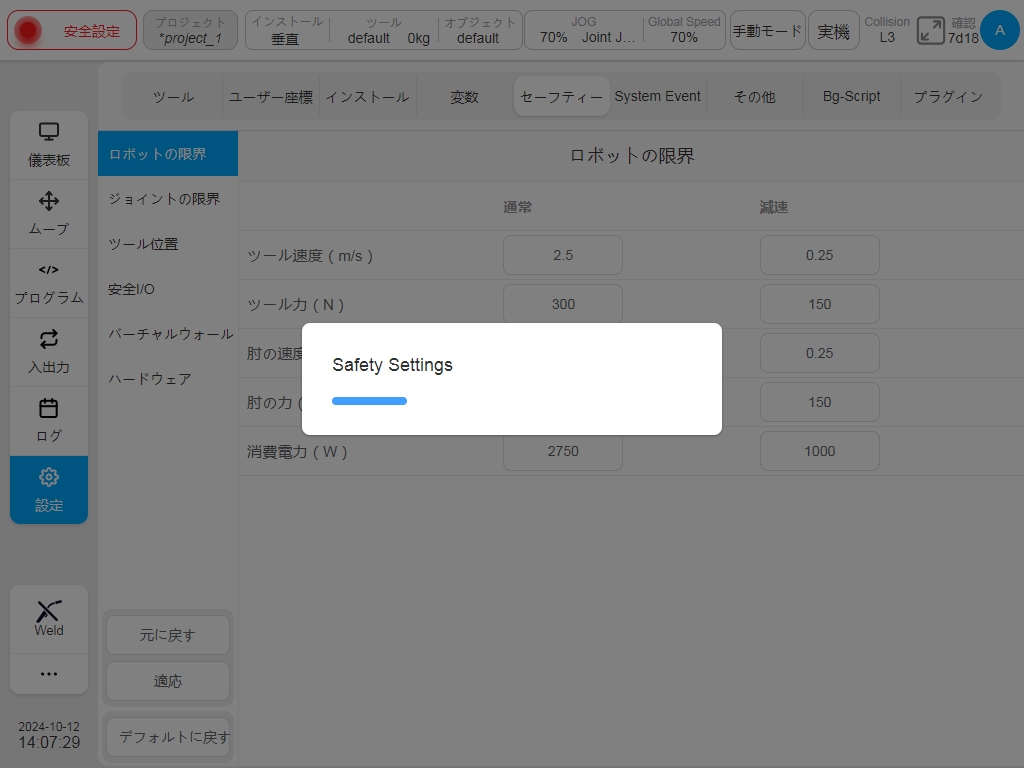
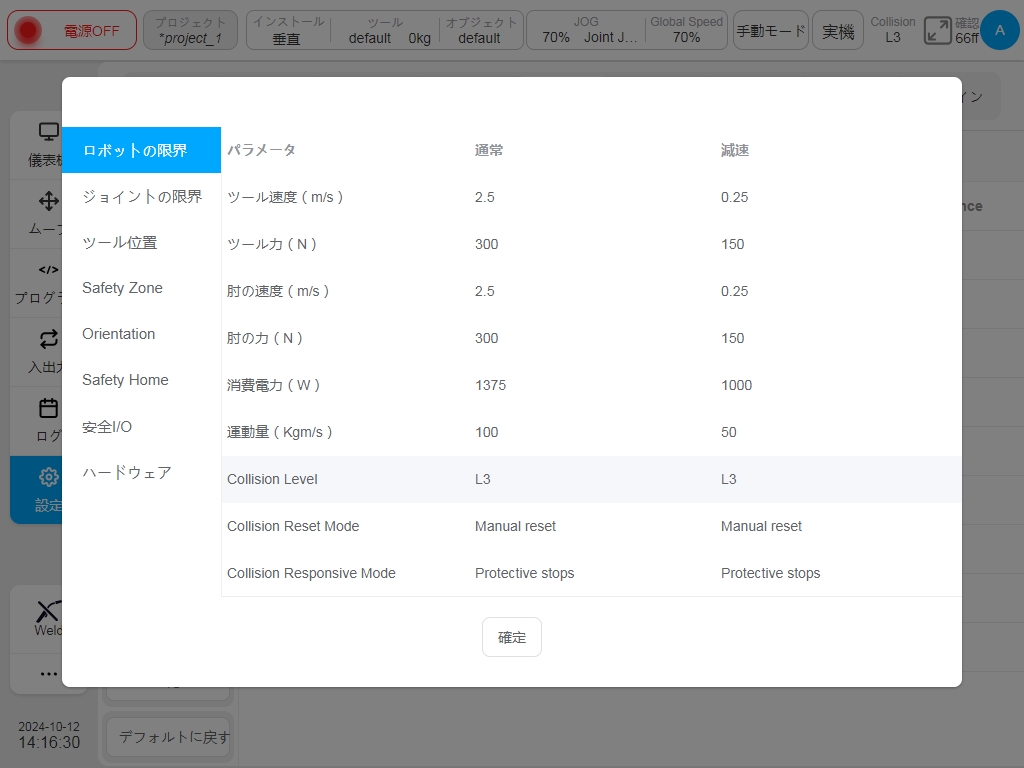
安全パラメータが設定されると、システムは設定された安全パラメータをチェックするためにダイアログボックスに表示します。下図に例を示します。すべてのチェックが終了したら、’OK’ ボタンをクリックして安全パラメータを設定します。設定に成功すると、ステータスバーの上の安全チェックが変更されます。

安全パラメータ 説明#
このセクションでは、ロボットの安全構成パラメータについて説明します。
安全モード#
ノーマルモード:セーフティモードはデフォルトで作動しています。
減速モード:このモードは、安全入力IOを使用して起動することができます。
回復モード:ロボットの実際の動作パラメータが安全限界を超え、ロボットが停止した場合、回復モードが起動し、ユーザーは安全限界内でロボットを動かすことができる。
ロボット安全パラメーター#
ロボットパラメータは一般的なロボットの動きを制限するために使用される。ユーザーは通常モードと縮小モードでパラメータ値を設定することができる。
最大終了速度: ロボットの終了時の最大速度を制限します。
Maximum Force at the End: ロボットの端で外部から加えられる力の最大値を制限する。
最大エルボースピード: ロボットの最大エルボースピードを制限します。
最大肘力: ロボットの肘によって加えられる最大外力を制限します。
しゅつりょく :ロボットが行う機械的作業の最大量を外部に制限する。

共同安全パラメータ#
関節パラメータ制限は、ロボットの各関節の位置範囲、最大速度、最大トルクを制限するために使用されます。通常モードと縮小モードでパラメータ値を設定することができます。
位置範囲:各ジョイントの最小位置と最大位置を定義します。
最大速度:各関節の最大角速度を設定します。
最大トルク:各ジョイントの最大トルクを定義します。

安全TCP#
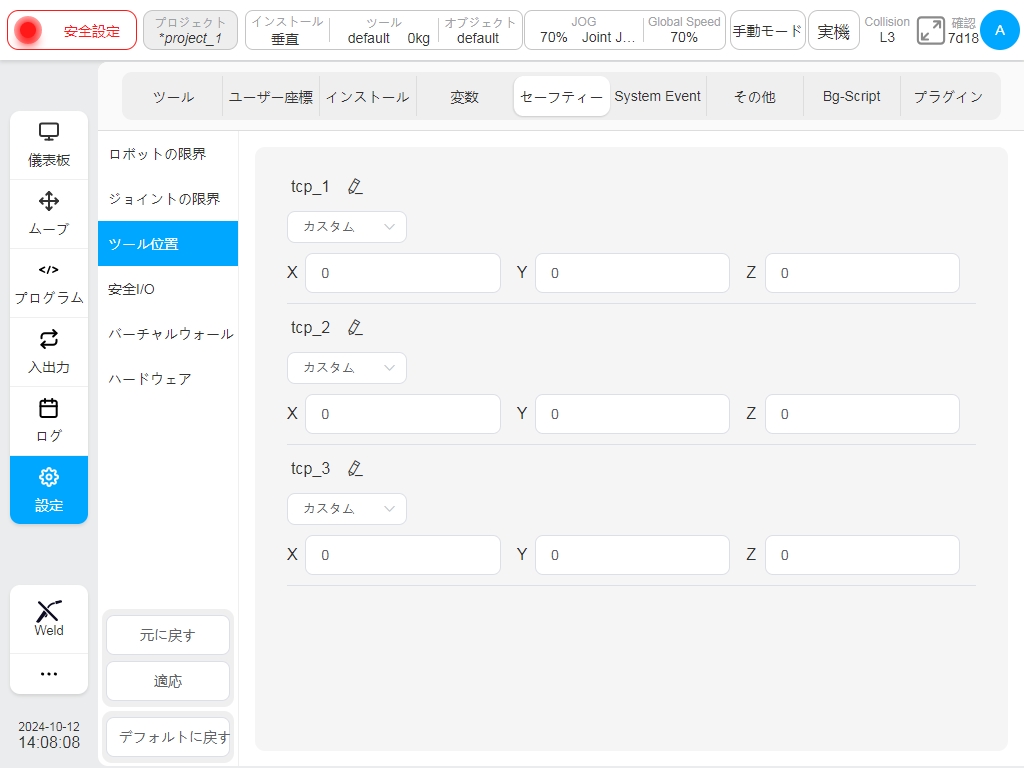
安全システムは3組のTCPオフセットを定義することができ、設定されるとロボットが速度監視と位置監視に使用します。TCPの位置または速度が安全設定を超えると、安全違反が発生します。
速度監視は、「ロボット安全パラメータ」のうち、ツールの最高速度です。位置監視は「仮想境界」とも呼ばれます。ドロップダウンボックスでは、既存のTCPを選択するか、XYZ値を直接カスタマイズすることができます。既存の TCP を選択し、X、Y、Z 入力フィールドの値を変更すると、ドロップダウンメニューの TCP 名が「Custom」になり、新しく定義された TCP であることを示します。
TCP 設定を変更しても、構成済みの安全パラメータには影響しない。
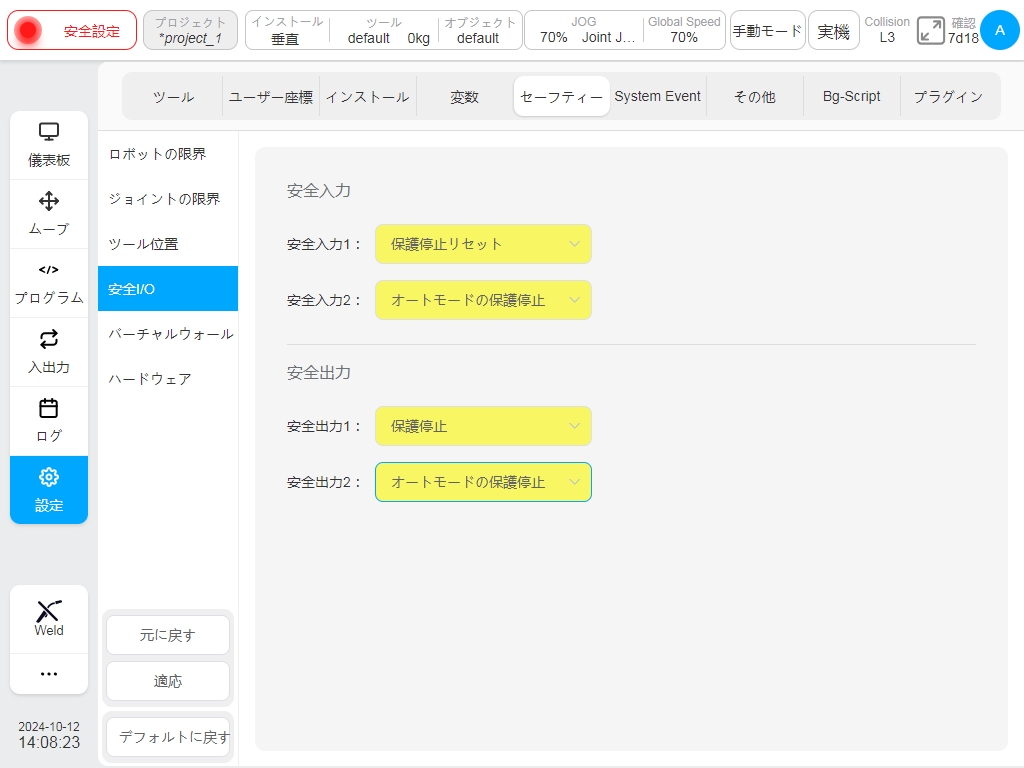
セーフティIO#
セーフティI/Oモジュールには、2つの構成可能なセーフティ入力ポートと2つの構成可能なセーフティ出力ポートがあります。
安全入力機能は以下の通り:
ガードリセット入力:ガード停止が発生した場合、ポートがトリガーされ、ロボットは通常の状態に戻ります。
自動モード保護停止入力:設定後、ロボットが自動モードでポートをトリガーすると、ロボットは保護停止を実行します。
自動モード保護リセット入力:自動モード保護が停止すると、ポートがトリガーされ、ロボットは通常状態に戻ります。
減速モード入力:設定後、このポートがトリガーされ、ロボットは減速モードに移行します。ロボットは減速し、パラメータリミットが減速モードの安全パラメータリミットを満たすようになる。
安全出力機能は以下の通り:
ガード停止出力:ロボットがガード停止状態の時にこのポートがトリガーされる。
自動モードガードストップ出力:ロボットが自動モードガードストップにあるとき、このポートがトリガーされます。
縮小モード出力:このポートはロボットが縮小モードにあるときにトリガーされます。
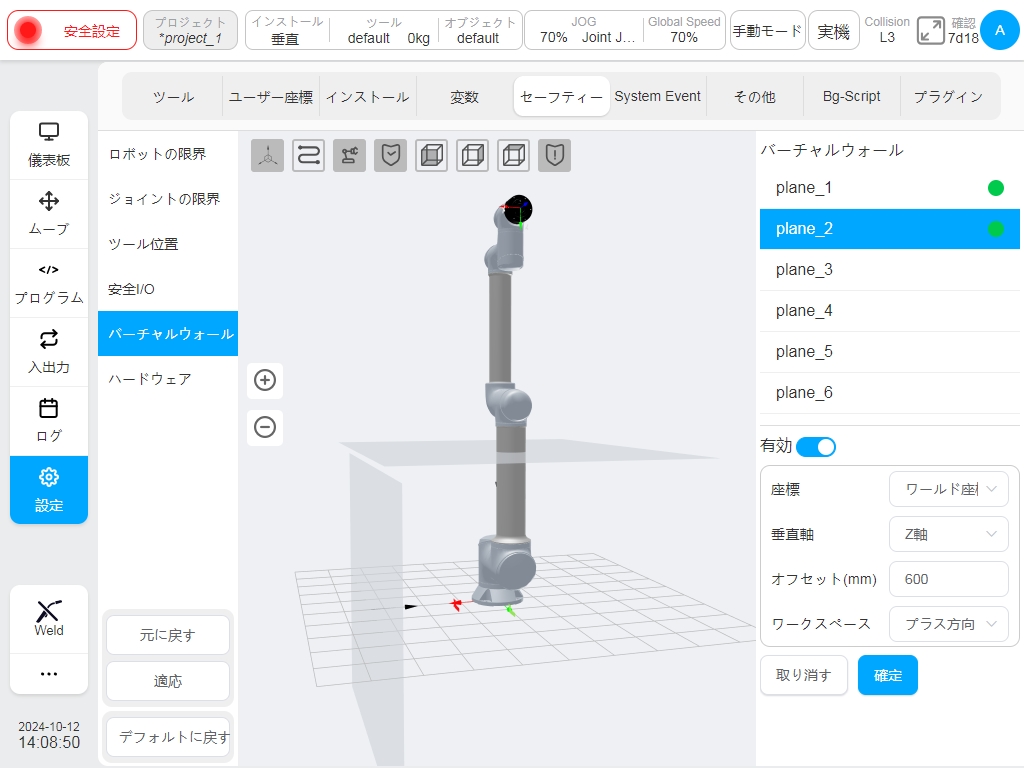
仮想バウンダリー#
ロボットのワークスペースを制限するために仮想境界を使用することができます。ロボットのツールと肘を制限するために6つの仮想境界を定義することができます。ロボットのツールや肘が仮想境界に触れると、ロボットはガード付き停止を実行します。
インターフェイスの右側にある緑色のインジケータは、平面がアクティブになっていることを示し、3Dディスプレイはアクティブになった仮想境界の位置と仮想境界の有効領域を表示することができます。平面を選択すると、対応する平面は3Dディスプレイ上でハイライトされます。
仮想境界は以下のように定義される:
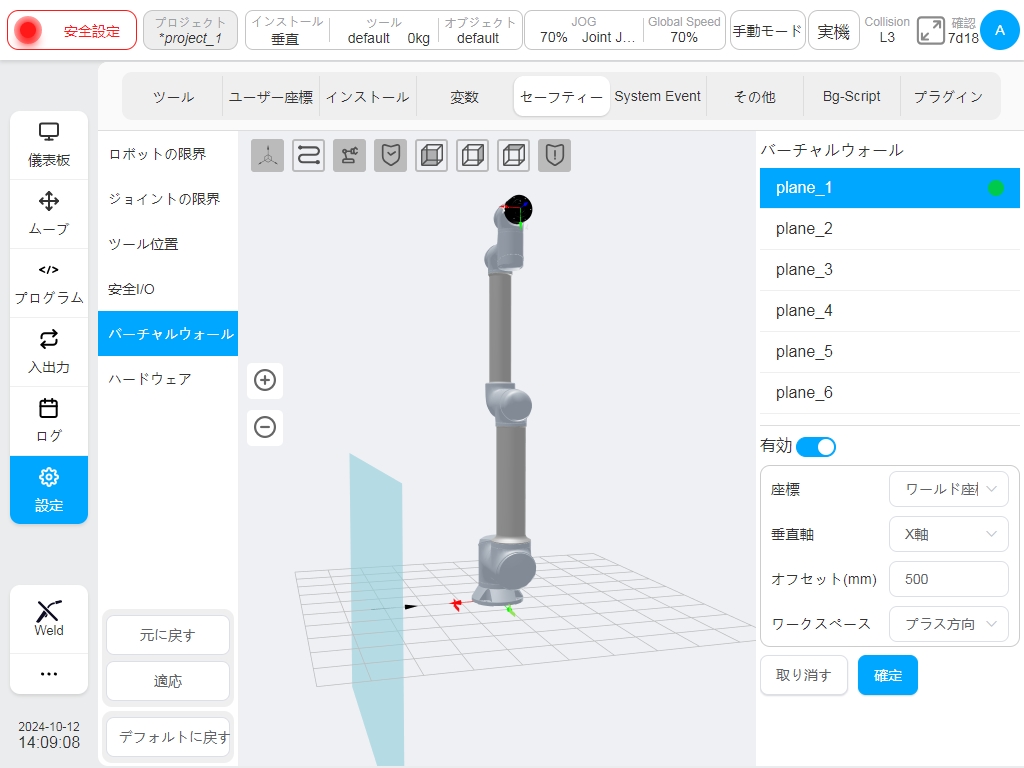
基準座標系を選択し、この基準座標系は、設定で定義されたワールド座標系、ベース座標系、またはワーク座標系とすることができ、基準座標系の軸(X、Y、Z)の1つを仮想平面の法線軸として選択し、その軸に沿ったオフセット距離を設定する。オフセット距離の正の値は、座標軸に沿った正のオフセットを示し、負の値は、座標軸に沿った負のオフセットを示す。このようにして平面を決定し、ロボットアームの有効活動領域がその平面側になるように選択する。例えば、基準座標系をベース座標系とし、Z軸を法線軸とし、オフセット距離を600mmとすると、ベース座標系のXoY平面をZ軸に対して正方向に600mmオフセットすることで仮想平面を形成する。
下図は対応するインタラクションを示し、平面を選択し、’Enable’と’Edit’ボタンをクリックし、基準座標系、法線軸を選択し、オフセット距離を入力し、有効エリアを選択する。OK’ボタンをクリックして仮想境界を定義し、仮想平面上に表示された矢印はロボットのアクティブエリアを示します。
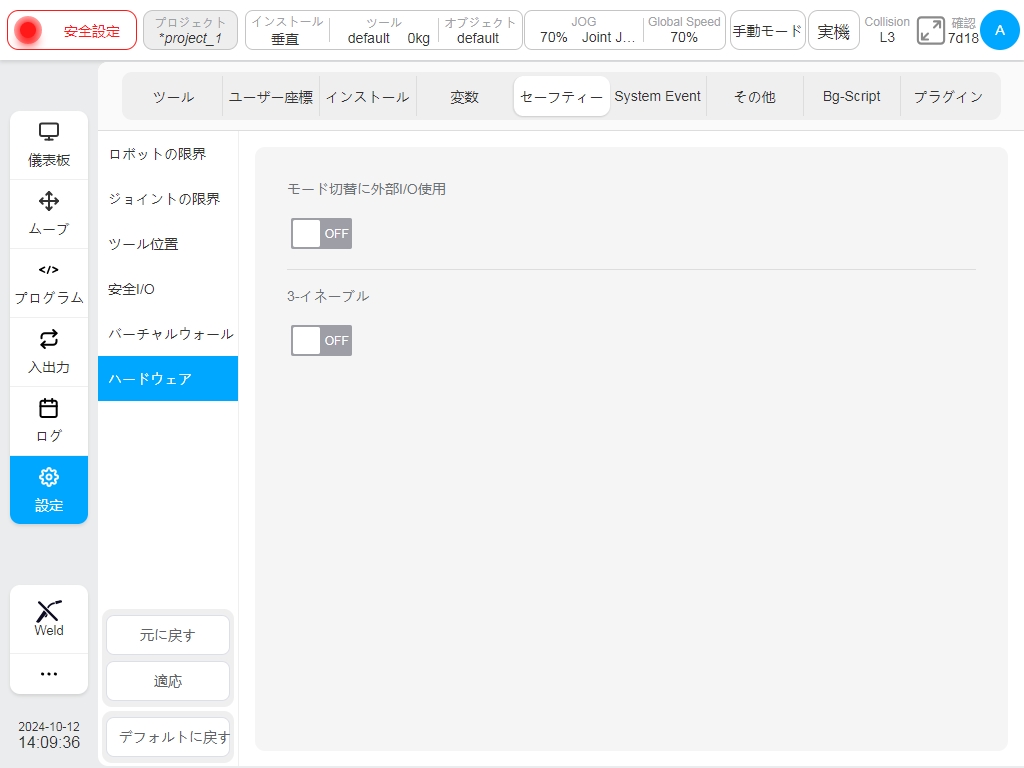
ハードウェア#
モード切り替え用の外部IOをイネーブルにし、3ポジションのイネーブル入力を装備。
モード切替の外部IOを有効にする:この項目を有効にすると、外部IOから手動でモード切替を行うことができる。インターフェイスのステータスバーに表示されるモード切替機能は無効です。
三位置有効入力:この項目が有効になると、ロボットが手動モードになっている間、ロボットはティーチペンダントの三位置スイッチが真ん中の位置にある時だけ動かすことができる。ロボットの移動中、三位置スイッチが真ん中以外の位置にある時、ロボットの停止機能が起動する。
デュコセーフティ V2.0#
セーフティコンフィギュレーションを見る#
ステータスバーの「Safety Verification」ボタンをクリックします。以下のダイアログボックスが表示され、現在アクティブになっている 安全構成パラメータが表示されます。
ユーザーは、設定ページ - Safety settings で安全設定パラメータを表示することもできます。

セーフティ・コンフィギュレーション変更申請#
セキュリティ設定を変更する前に、ユーザーはパスワードを使用してロボットのロックを解除する必要があります。Setup’ページ-‘Security Configuration’に入り、左下の’Unlock’ボタンをクリックし、停電の場合のみロックを解除することができ、パスワード(現在ログインしているユーザのログインパスワード)を入力し、確認に合格した後、セキュリティパラメータ設定モードに入る。この時、ステータスバーのステータス表示エリアには「Security Parameter Configuration」と表示されます。

Confirm」ボタンをクリックすると、図に示すように安全パラメータをロードするためのプロンプトボックスが表示されます。
安全パラメータが設定されると、設定された安全パラメータがダイアログボッ クスに表示され、確認できます。下図を確認して確認してください。OK」ボタンをクリックして安全パラメータを設定します。設定に成功すると、ステータスバーの上の安全チェックが変わります。
安全パラメータ 説明#
このセクションでは、ロボットの安全構成パラメータについて説明します。
安全モード#
ノーマルモード:デフォルトでセーフティモードが有効になっています。
減速モード:このモードは、安全入力IOを使用して起動することができます。
回復モード:ロボットの実際の動作パラメータが安全限界を超え、ロボットが停止した場合、回復モードが起動し、ユーザーは安全限界内でロボットを動かすことができます。
ロボット安全パラメーター#
ロボットパラメータは一般的なロボットの動きを制限するために使用される。ユーザーはノーマルモードとリデュースモードでパラメータ値を設定できる。
最大終端速度: ロボットの終端の最大速度を制限する。
最大終端力: ロボットの終端で外部から加えられる力の最大値を制限する。
最大エルボースピード: ロボットの最大エルボースピードを制限します。
最大肘力: ロボットの肘によって加えられる最大外力を制限します。
パワー: ロボットが行う最大の機械的作業を外部に制限し、ロボットの負荷の端はロボット本体の一部とみなす。
最大運動量(Maximum Momentum): ロボット出力の最大運動量を制限し、ロボット負荷の端はロボット本体の一部とみなす。
衝突検知レベル: 外界との衝突を検知するロボットの感度で、レベルが高いほど感度が高くなる。
衝突リセットモード: 衝突後にロボットをリセットする方法。
衝突応答モード: 衝突後にロボットを応答させる方法。

共同安全パラメータ#
関節パラメータ制限は、ロボットの各関節の位置範囲、最大速度、最大トルクを制限するために使用されます。ユーザーはノーマルモードと縮小モードの両方でパラメータ値を設定することができます。
位置範囲:各ジョイントの最小位置と最大位置を定義します。
最大速度: 各関節の最大角速度を設定します。
最大トルク:各ジョイントの最大トルクを定義します。

安全TCPと工具#
安全システムは3組のTCPオフセットを定義でき、設定されるとロボットが速度モニタと位置モニタに使用します。TCP位置と速度のいずれかが安全設定を超えると、安全違反がトリガされます。
速度モニタは、’Robot Safety Parameters’にあるロボットの安全TCP中心の空間での最大直線速度であり、位置モニタは’Safe Area’とも呼ばれる。安全TCPは3つ設定でき、TCPを定義するにはグローバル変数で定義されたツール座標系を選択するか、入力座標系の値をカスタマイズする2つの方法があります。定義済みの工具座標系を使用する場合、工具座標系が選択され、工具座標系の値がX、Y、Z入力ボックスに表示されます。X、Y、Zの値を変更すると、座標系はカスタマイズされたものになります。グローバル変数の対応する座標系の値が変更され、現在のセキュリティ設定で使用されている座標系の値と一致しない場合、「!」アラートアイコンがポップアップ表示されます。カスタム入力データ」を選択すると、X、Y、Z、Rx、Ry、Rz、エンベロープのボール半径の値が直接編集されます。
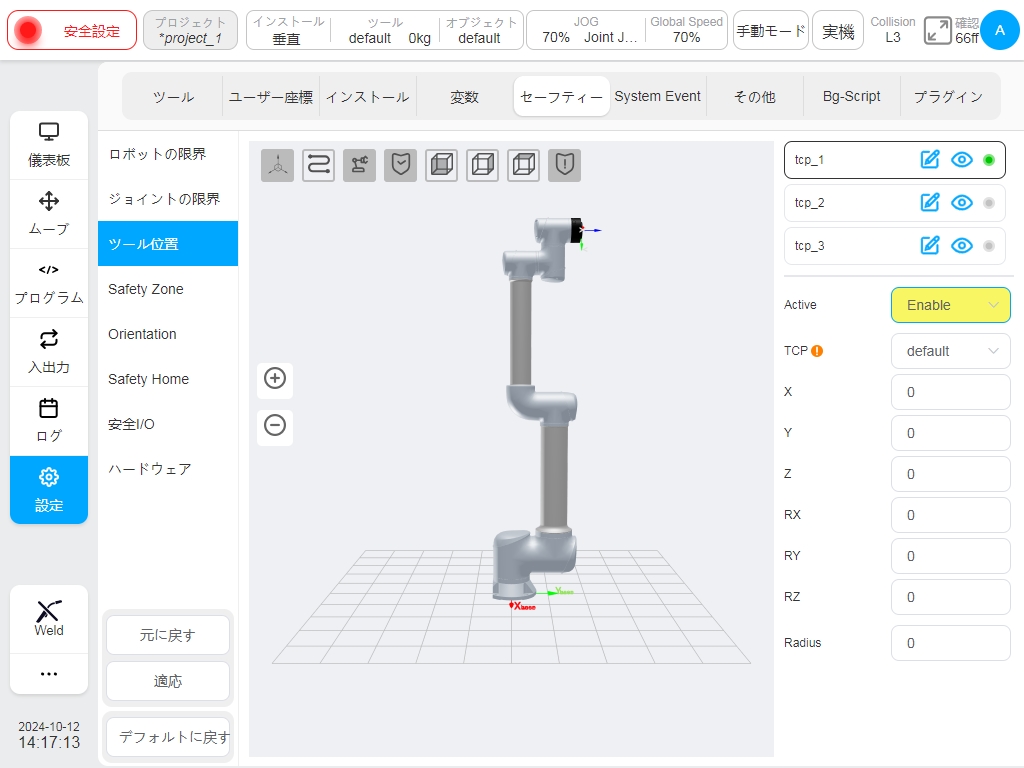
各セーフティTCPは、無効、常時アクティブ、自動モードアクティブ、セーフティコンビネーションコンフィグレーション1、セーフティコンビネーションコンフィグレーション2の5種類の起動条件を総合的に設定できます。3 つの TCP すべてを無効にすると、安全制御システムのデフォルトはボール半径 50mm のフランジ付き座標系になります。TCP 構成ステータスは、TCP 構成リストに表示されます。特定の TCP が無効なときは、対応するステータスが灰色で表示されます。構成された安全 TCP は、3D 表示領域に座標系とエンベロープ球を表示でき、 アイコ ンで対応する TCP 名を表示または非表示にできます。デフォルトの TCP 名を変更するには、TCP 名の横にある
アイコ ンで対応する TCP 名を表示または非表示にできます。デフォルトの TCP 名を変更するには、TCP 名の横にある  アイコンをクリックします。無効になっていない安全 TCP は
アイコンをクリックします。無効になっていない安全 TCP は  と表示される。それ以外の場合は、
と表示される。それ以外の場合は、 と表示される。
と表示される。
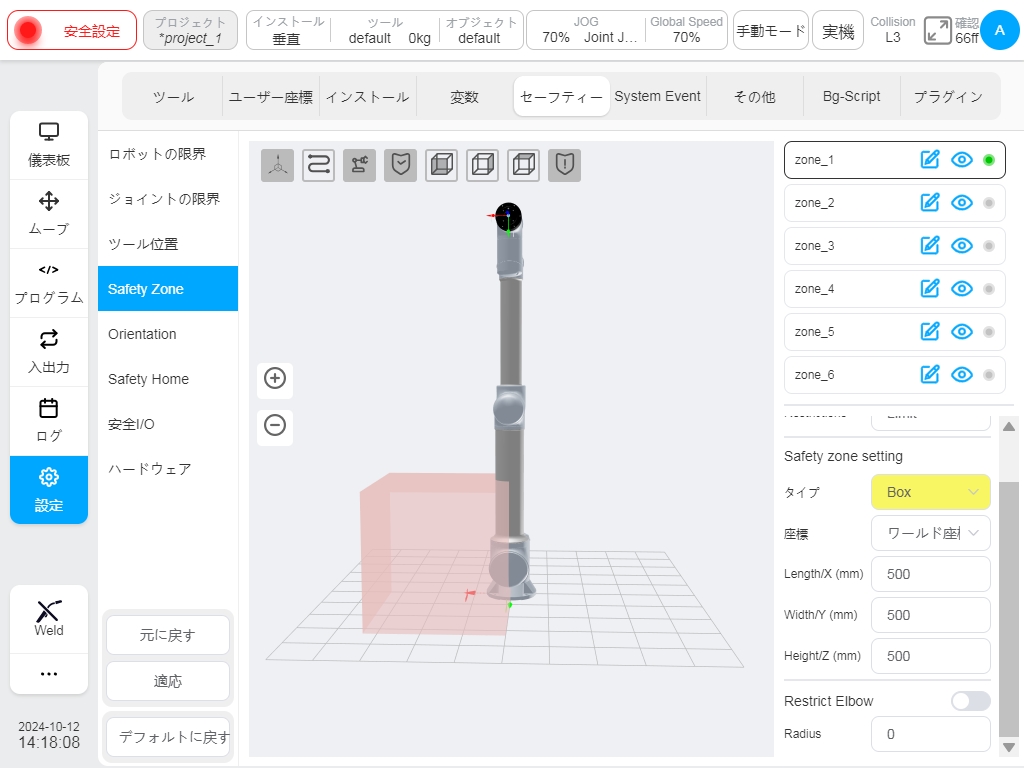
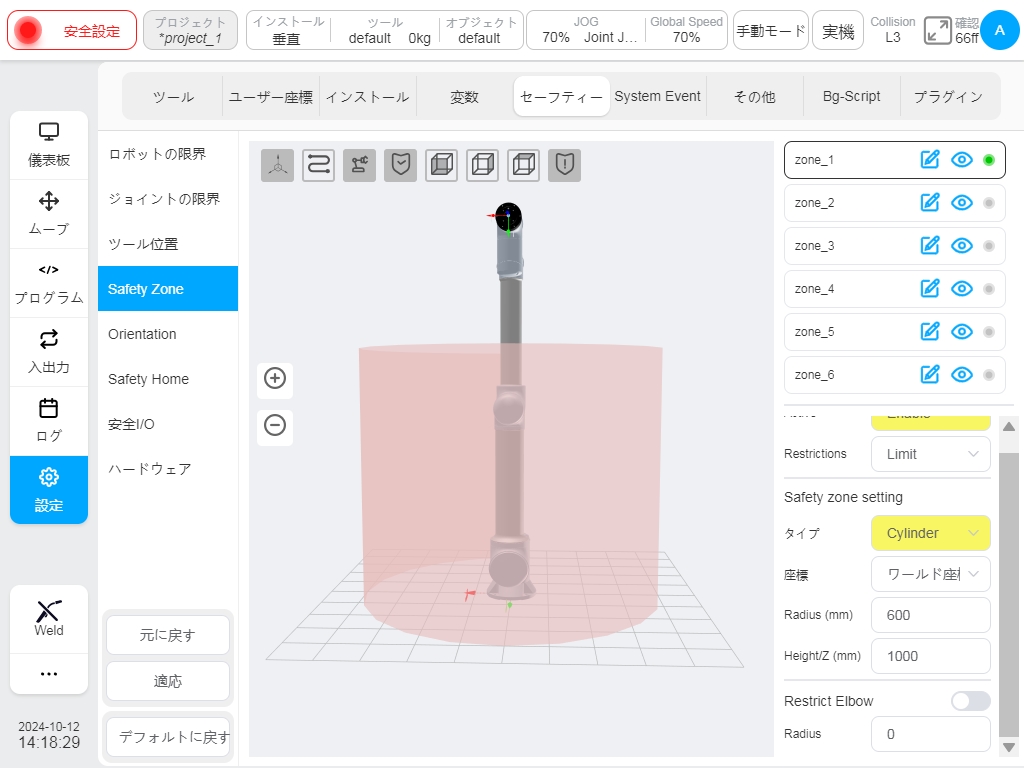
安全地帯#
セーフティゾーンの定義タイプには、平面、長方形、円柱があります。ユーザは、最大 6 つの独立したスペースゾーンを設定できます。安全ゾーン名の横にあるアイコン をクリックすると、3D 表示ゾーンに設定された安全ゾーンが表示または非表示になります。また、安全ゾーン名(例:デフォルト名zone_1)の横にあるアイコン をクリックすると、その名前を変更することができます。セキュアゾーンが無効になっていない場合は が表示され、そうでない場合は が表示されます。
セーフティゾーンの起動設定には以下のものがあります:無効、常時アクティブ、自動モードアクティブ、安全グループ構成 1、安全グループ構成 2。
安全ゾーンの境界応答とは、ロボットが外側から安全ゾーンに進入し、内側から境界を越えて移動する際の応答を指す。応答モードは2つあり、境界を超える動きを制限するモードと、ゾーンに入ったときにリデュースモードをトリガするモードがある。選択制限が境界を超える場合、ロボットが境界を越えて移動する際の応答について説明する。トリガーリデュースモードが選択された場合、ロボットが外側からゾーンに入ったときの応答が記述され、ロボットがゾーンを出ると通常モードに戻る。
スペースゾーンはエルボーの制限を含むように設定することもでき、エルボーのスペース範囲は球形の半径の形で設定される。

設定ゾーンタイプが平面の場合、平面ゾーンの基準はワールド座標系/ベース/設定ワーク座標系に基づき、平面の法線と法線オフセットを設定することで平面を決定する。平面の設定はリージョンを選択することで有効になり、対応する方向は3Dゾーンに黒い矢印で表示されます。
構成ゾーンのタイプがスペースキューボイドの場合、キューボイドゾーンの設定基準はワールド座標系/ベース/セットワーク座標系に基づき、ワーク座標系はキューボイドのコーナーポイントとして使用され、3つの座標軸方向はそれぞれ長さ(X)、幅(Y)、高さ(Z)に対応する。長さ、幅、高さは-3000mmから3000mmの範囲である。
構成ゾーンタイプがスペースシリンダの場合、設定基準はワーク座標系を円平面の中心としたワールド座標系/ベース/セットワーク座標系とし、Z方向は高さ方向を指し、半径と高さを設定できる。半径は0~3000mm、高さは-3000mm~3000mmです。
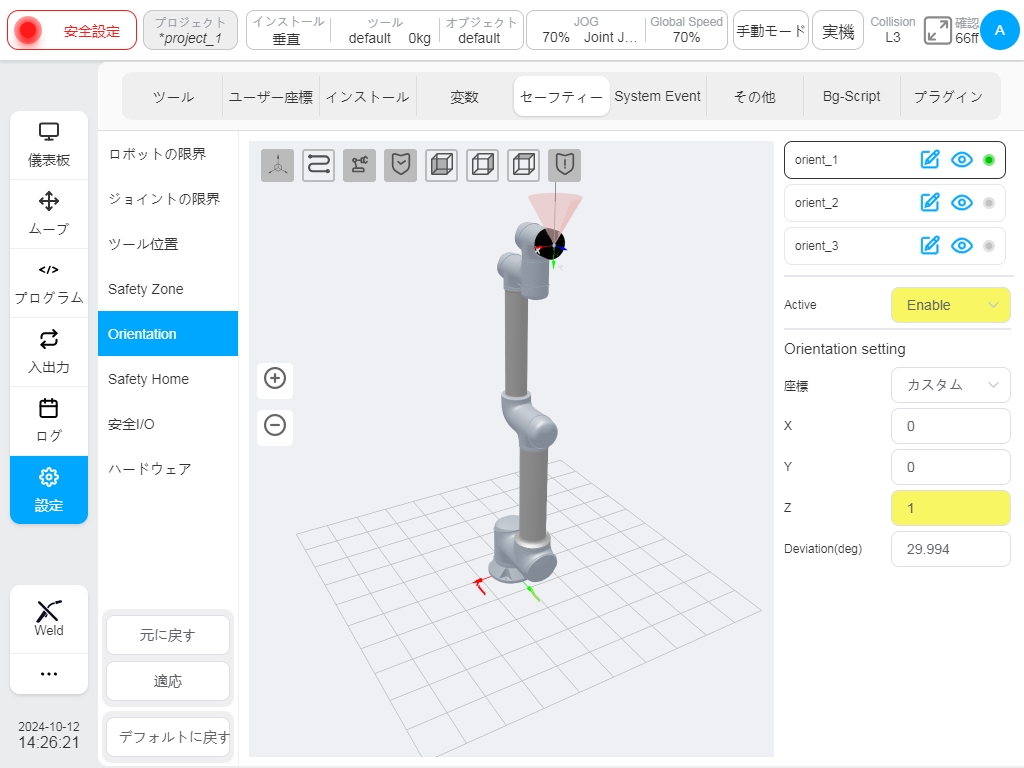
安全姿勢ゾーン#
安全姿勢領域の設定。姿勢領域とは、ロボットのベース座標系において、方向ベクトルを中心とした円錐角を形成することをいう。姿勢制限は、ロボットTCPのZ軸のみを姿勢領域に制限する。ユーザーは最大3つの姿勢ゾーンを設定できます。1つの姿勢ゾーンは、姿勢エリアの右側にある名前の横のアイコン をクリックすることで表示/非表示を切り替えることができます。名前の後ろのアイコン をクリックすると、ポーズゾーンの名前を変更できます。 はポスチャーエリアが無効になっていなければ表示され、そうでなければ は無効になります。
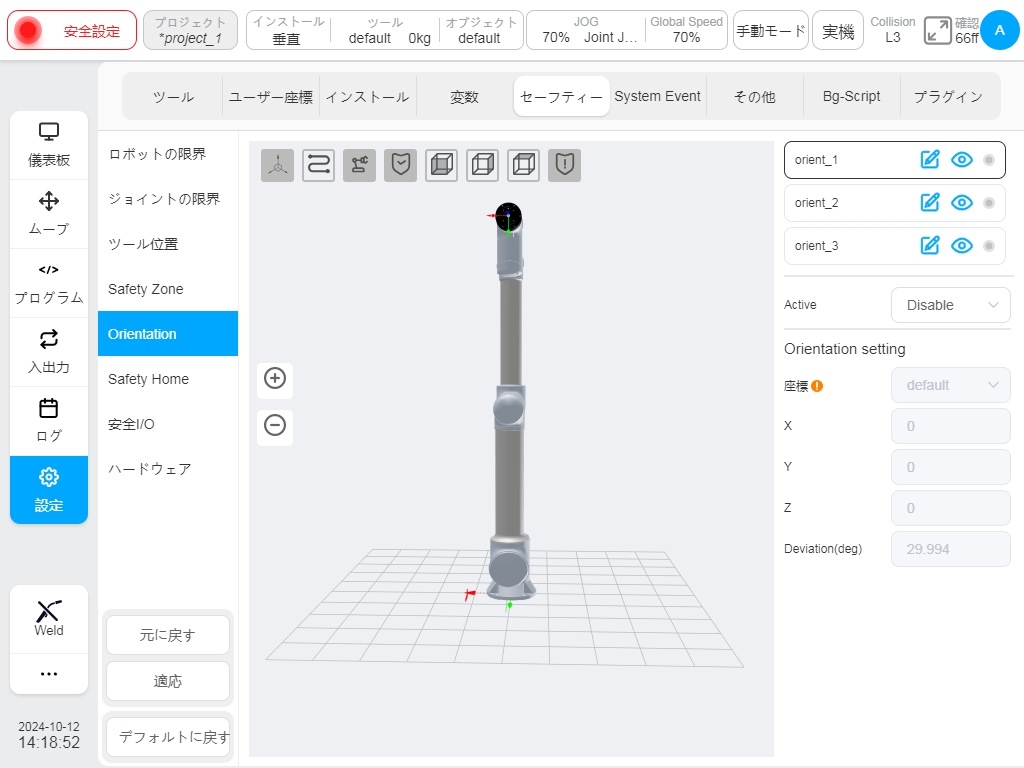
安全姿勢ゾーンは、5 つのモードでアクティブにできます:無効、常にアクティブ、自動モードアクティブ、安全グループ構 成 1、安全グループ構成 2。安全姿勢ゾーンは安全ゾーンと異なり、TCP の Z 軸方向のみが制限され、ゾー ンを超えた後に保護停止をトリガする応答モードは 1 つだけです。
安全姿勢ゾーンの基準座標系を定義するには、3つの方法があります:Custom、現在のTCPポーズをキャプチャし、定義済みのワーク座標系を通して定義する。カスタムを選択した場合、ロボットベース座標系で値を記述する方向ベクトルX、Y、Zの値を手動で修正する。現在のTCP姿勢を選択した場合、現在のTCPのZ軸方向を姿勢ゾーンの基準方向とし、ロボットベース座標系に変換してベクトル方向X、ベクトル方向Y、ベクトル方向Zを記述する。ワーク座標系で定義された場合、ワーク座標系のZ軸方向を姿勢ゾーンの基準方向とし、ロボットベース座標系に変換し、手動で修正するとカスタムモードになる。
ワーク座標系の向きが外部から変更された場合、基準座標系にリマインダーアイコン が表示されます。ゾーン偏差角度は5度から180度の範囲です。例えば
安全ホーム#
Safety Home’ 設定では、’Safety Home’ モニタリングは ‘Other’ 設定ページの Home Location 設定を同期します。Safety Home」設定の位置と「Other」設定のホーム位置が異なる場合は、「Synchronize Home」設定の下にリマインダアイコン|A1|が表示されます。設定が同期されていない場合、システムのホーム位置はセーフティ設定に従う。セーフティコントローラの設定は、モバイルインターフェイスの ‘Press Home’ 原点と、ロボットの他のポート(ポート 2001 など)からの原点信号の出力に優先します。Other’設定ページの原点は記録として使用されるだけで、原点判定の基準にはなりません。原点監視のしきい値は設定可能で、1~5°の範囲で設定できます。
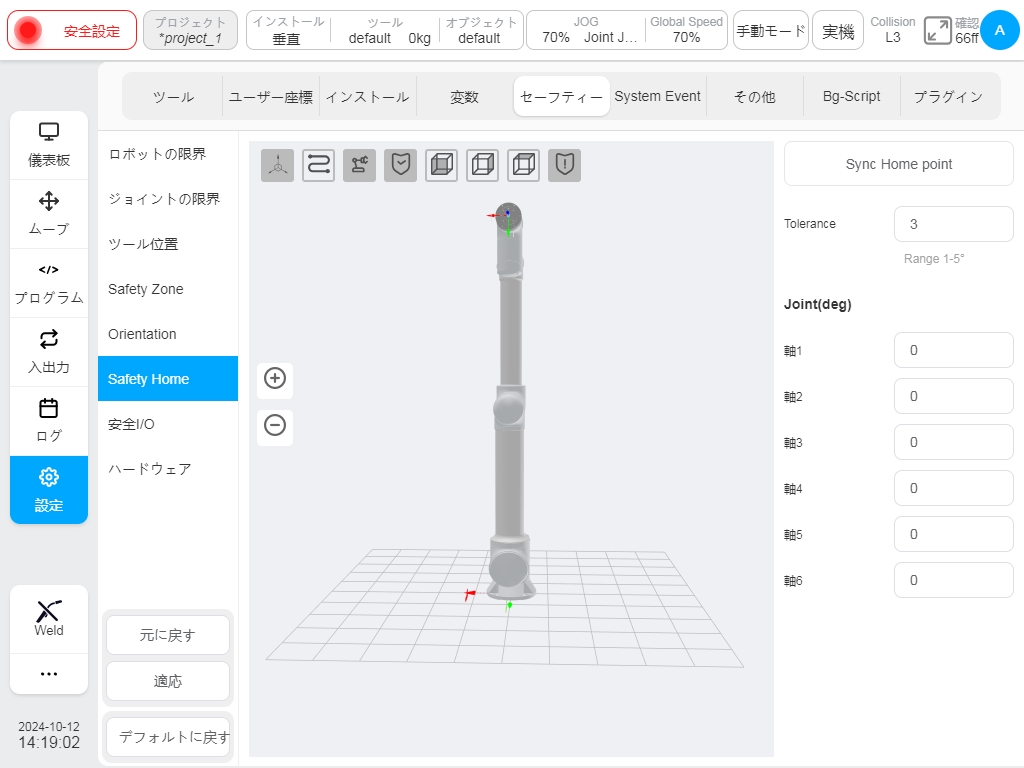
Home位置の同期を選択すると、Home位置の関節角度が表示されます。また、3Dモデル表示領域のロボットモデルが対応する位置に更新されます。
安全原点が設定され、原点出力が安全 I/O で構成されているとき (6.2.3.8 節を参照 )、ロボットのすべての関節角度が設定された原点範囲 (設定点-しきい値、設定点 + しきい値) 内にあり、速度が 0°/s に近い (通常のエンコーダの振れをフィルタするため)。システムプリセットの関節速度は 2°/s未満)、安全出力外部出力の原点に信号が到達し、500ミリ秒(システムで予め設定されており、設定できない)持続する。
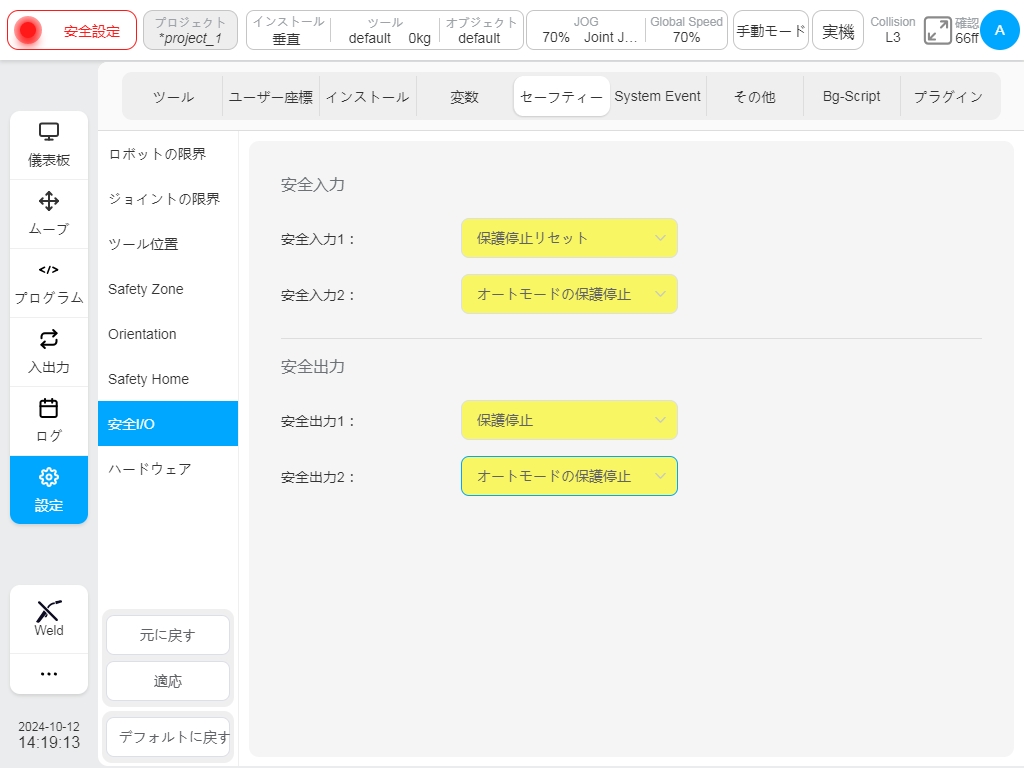
セーフティIO#
セーフティI/Oモジュールには、2つの構成可能なセーフティ入力ポートと2つの構成可能なセーフティ出力ポートがあります。
安全入力機能は以下の通り:
保護リセット入力:保護停止が発生すると、ポートがトリガーされ、ロボットは通常状態に戻ります。
自動モード保護停止入力:設定後、ロボットが自動モードでポートをトリガーすると、保護停止を実行します。
自動モード保護リセット入力:自動モード保護停止が実行されると、ポートがトリガーされ、ロボットは通常状態に戻ります。
減速モード入力:設定後、このポートがトリガーされ、ロボットは減速モードに移行する。減速モードでは、ロボットはパラメータリミットが安全パラメータリミットを満たすまで減速します。
安全組合せ構成 1/2: 安全組合せ構成 1 または安全組合せ構成 2 のポートがトリガされると、安全ツール、安全ゾーン、安全姿勢エリアを含む、安全組合せ構成 1 または安全組合せ構成 2 で構成されたすべての安全機能がアクティブになり、監視されます。
安全出力機能は以下の通り:
保護停止出力:このポートは、ロボットが保護停止状態にあるときにトリガされます。
自動モード保護停止出力:このポートは、ロボットが自動モード保護停止しているときにトリガされます。
リデュースモード出力:このポートは、ロボットがリデュースモードにあるときにトリガーされます。
ホームロケーション:このポートは、ロボットが安全なホームロケーションの近くにいるときにトリガされます;
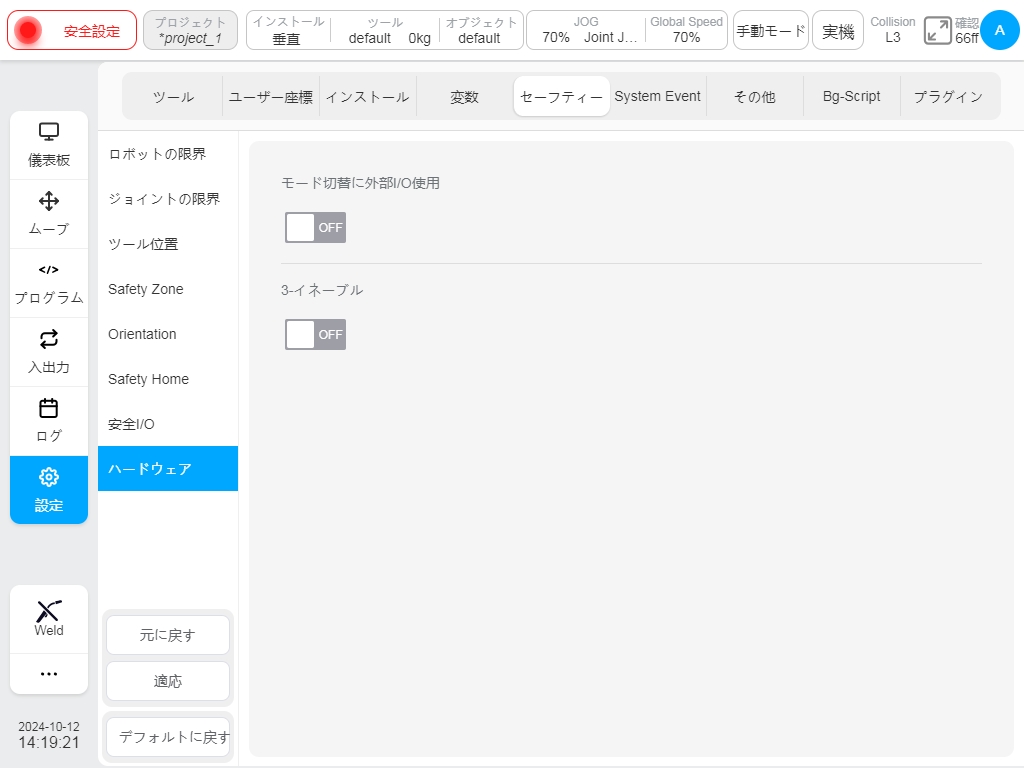
ハードウェア#
モード切替用の外部IOと3つのポジションイネーブル入力を装備
モード切替の外部IOを有効にする:この項目を有効にすると、外部IOから手動でモード切替を行うことができる。インターフェイスのステータスバーに表示されるモード切替機能は無効です。
三位置有効入力:これを有効にすると、ロボットが手動モードの場合、ティーチペンダントの三位置スイッチが真ん中の位置にある時のみロボットを動かすことができる。ロボットの移動中に3ポジションスイッチが真ん中以外の位置にある場合、ロボットは一時停止する。