概要ページ#
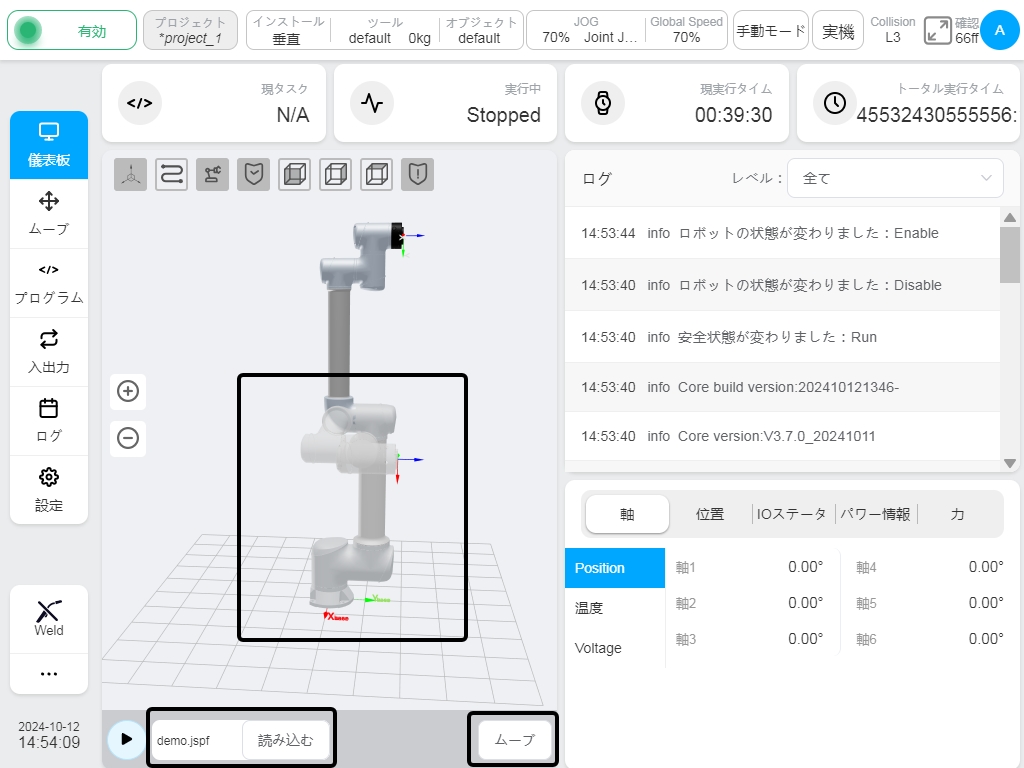
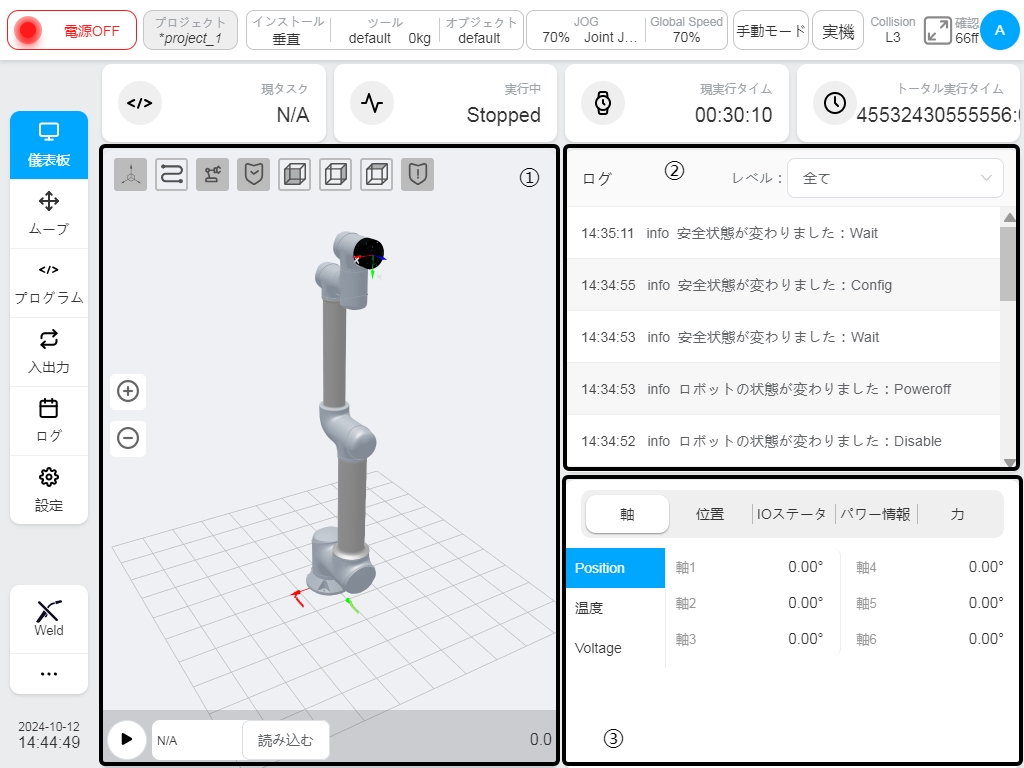
ナビゲーションバーの’Overview’ボタンをクリックすると、図のような概要ページが表示される。ページ上部のコンテンツエリアには、現在実行中のプログラム、プログラムの実行状況、現在の実行時間、マシン全体の実行時間が表示されます。ページの左側には、①3Dシミュレーションモデルが表示され、右上には、②ログ情報が表示され、ログは5つのレベルを選択して見ることができる:右下には、③ロボットの関節情報(位置/温度/電圧)、空間位置(ベース座標系)、IO の状態、電源情報(制御盤内)、力情報が表示される。
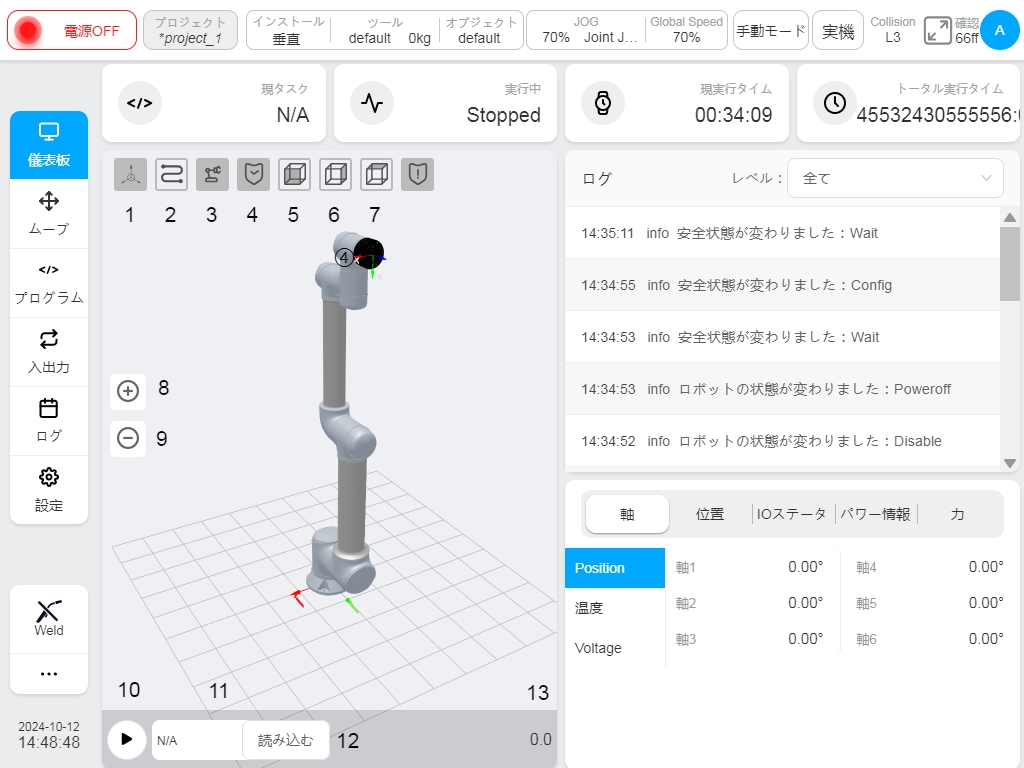
左上の①~⑦のアイコンは、ワーク座標系とツール座標系、終端軌跡、ロボット3Dシミュレーションモデル、セーフティゾーン、正面図、右側面図、上面図を表示します。アイコンの⑧、⑨はそれぞれ3Dモデルの拡大、縮小を操作するボタンです。アイコン⑩~⑬はそれぞれプログラム実行ボタン、現在実行中のプログラム表示ボックス、 プログラム読み込みボタン、プログラム実行時間表示です。
Load」ボタンをクリックすると、図のようなプログラム・リスト・インターフェースがポップアップ表示されます。プログラムリストには、すべてのフォルダ(例:Test_1)と拡張子が.jspfのプログラムファイル(例:ee.jspf)がリストされます。画面下部には3つのボタンがある:上の階層に戻る、キャンセル、選択。
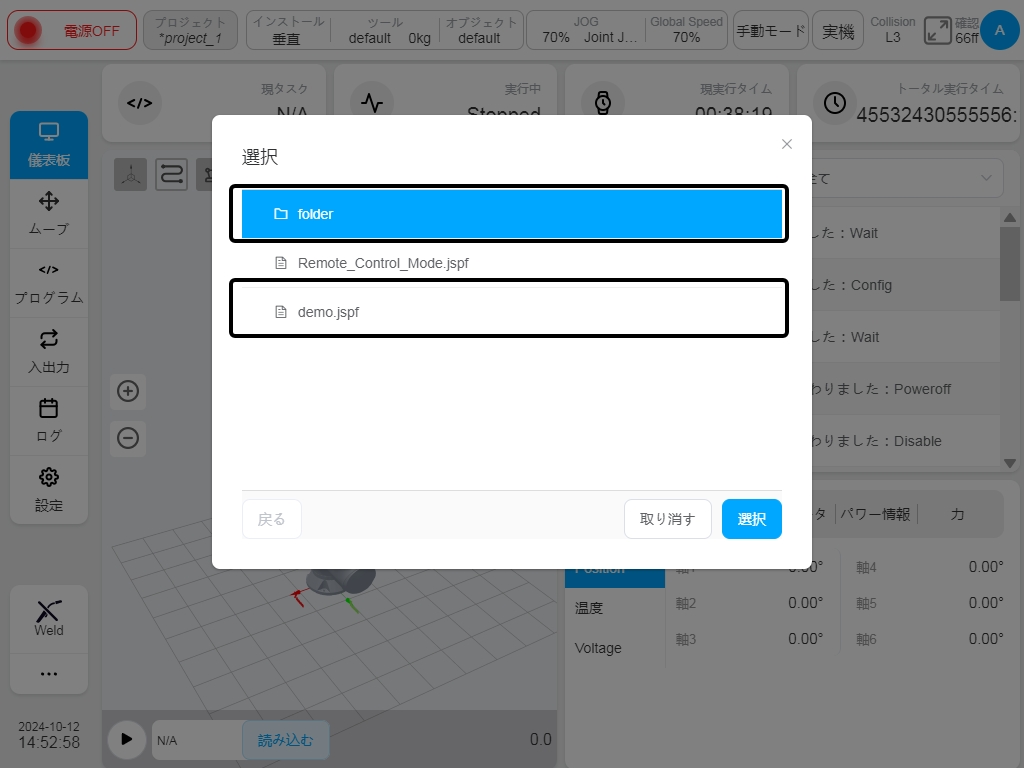
ロードして実行する必要があるプログラムファイルを選択し、インターフェイス上の「選択」ボタンをクリックすると、プログラムリストインターフェイスは自動的に消え、アイコン表示には選択したプログラムファイルのファイル名または「…/」の付いたファイル名が表示されます。選択されたプログラムファイルのファイル名または「…/」の付いたファイル名(例えば…/4560.jspfのようにネストされたフォルダがあります)がアイコンに表示されます。プログラムが「Start」ファンクションブロックで開始する場合、「Hold to Move」ボタンを押しながら「Run」ボタンをクリックすると、図のようにグレーのパース3Dモデル(グレーの3Dモデルと総称する)が表示される。ホールド移動」ボタンを押し続けると、ロボットがプログラムで設定された初期位置、すなわち灰色の透視3Dモデルに移動し、途中でボタンを離すと移動が停止します。ロボットがグレーの3Dモデルに移動すると、「Press and Hold Move」ボタンは消えます。この時点で「Run」ボタンを再度クリックしてプログラムを実行する。