安全整備#
マニュアル・リリース・ブレーキ#
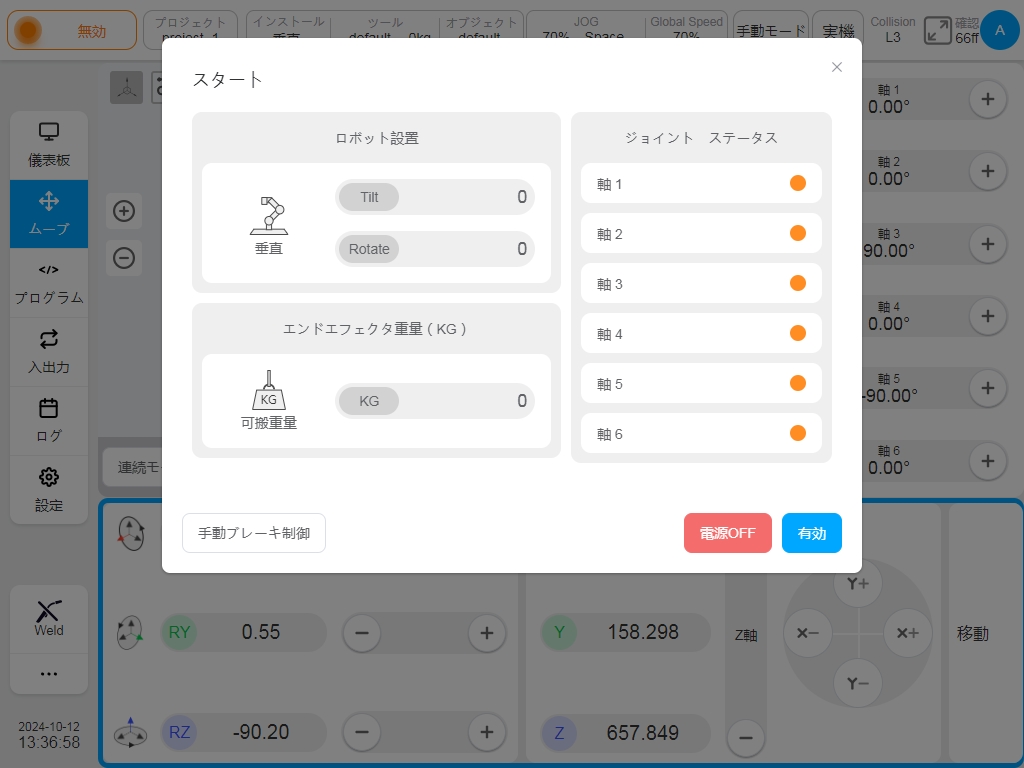
場合によっては、ユーザーが手動で 1 つの関節のブレーキを解除する必要があります。ロボットの電源は入っているが有効になっていない場合、手動でブレーキを解除するための入り口が図のようにスタートアップページに表示されます。
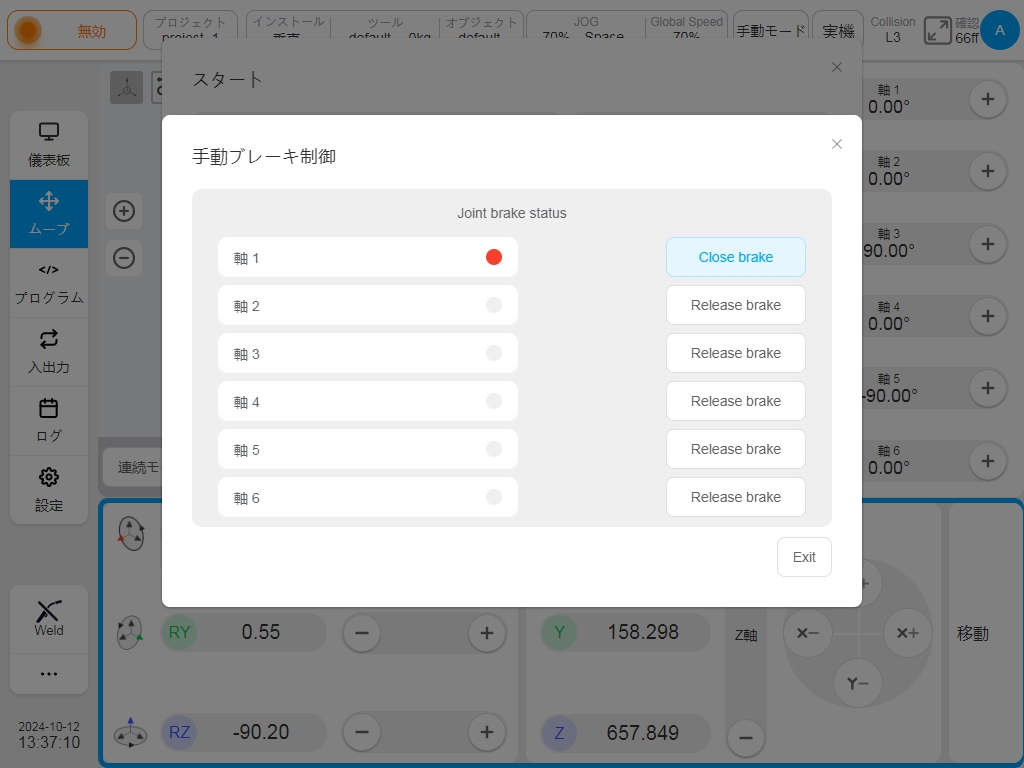
クリックすると、図のように手動解除ブレーキのページに入ります。ページの左側には各ジョイントのブレーキの状態が表示され、グレーはブレーキが閉まっている状態、赤はブレーキが解除されている状態を示しています。右側には「ブレーキコントロール」ボタンがあり、クリックするとブレーキの開閉をコントロールすることができます。
ブレーキテスト#
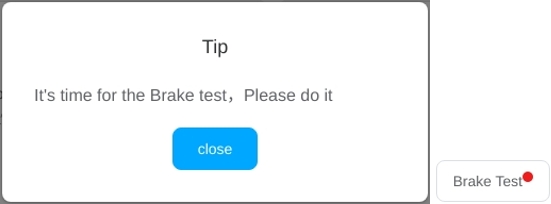
ロボットのブレーキ故障によるリスクを防ぐため、ユーザーは定期的にブレーキテストを実施する必要があります。システムは定期的にブレーキテストを実施するようユーザーに通知します。
前回のブレーキ・テストから設定した時間が経過すると、次のようなダイアログ・ボックスが表 示され、ブレーキ・テストの実行を促します。起動ページのブレーキ・テストの入口が小さな赤い点で表示され、ユーザーに注意を促します。
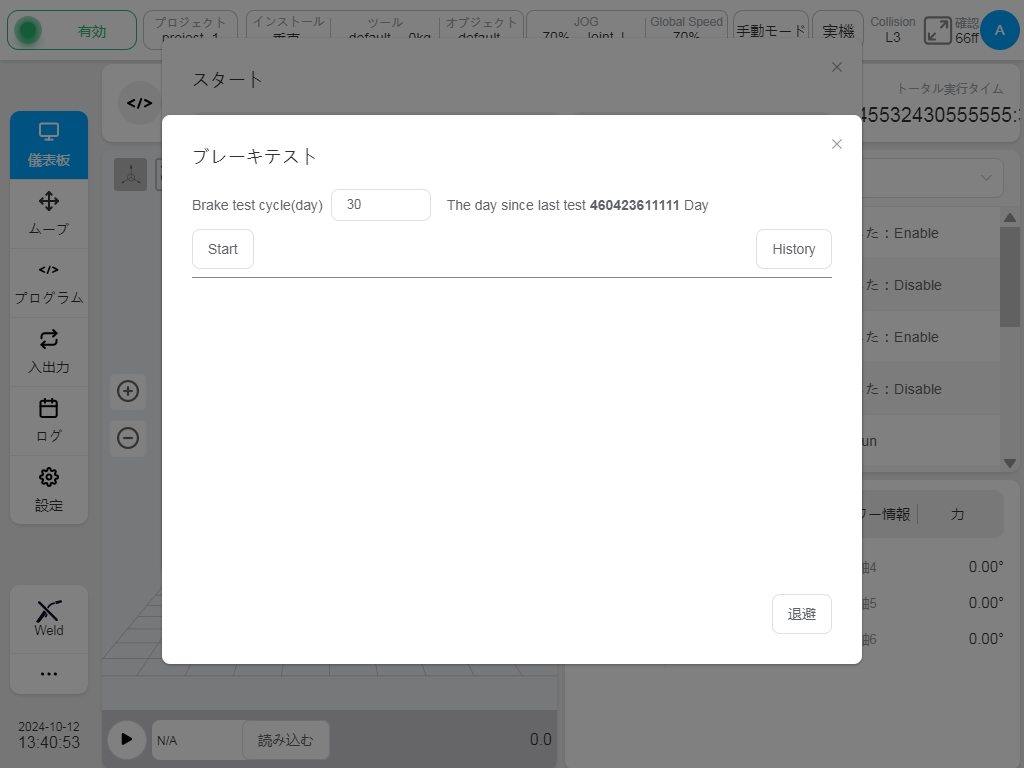
ロボットを有効にすると、スタートページにブレーキテスト機能への入り口が表示されます。ボタンをクリックすると、図に示すブレーキテスト画面に入ります。このページには、ブレーキテスト期間と前回のブレーキテストからの日数が表示されます。
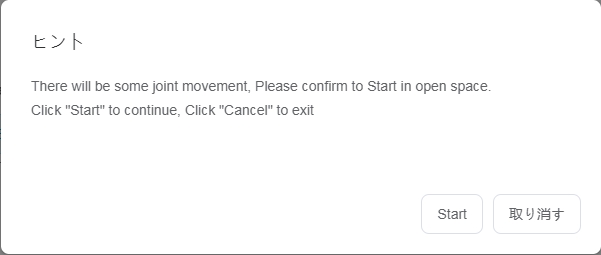
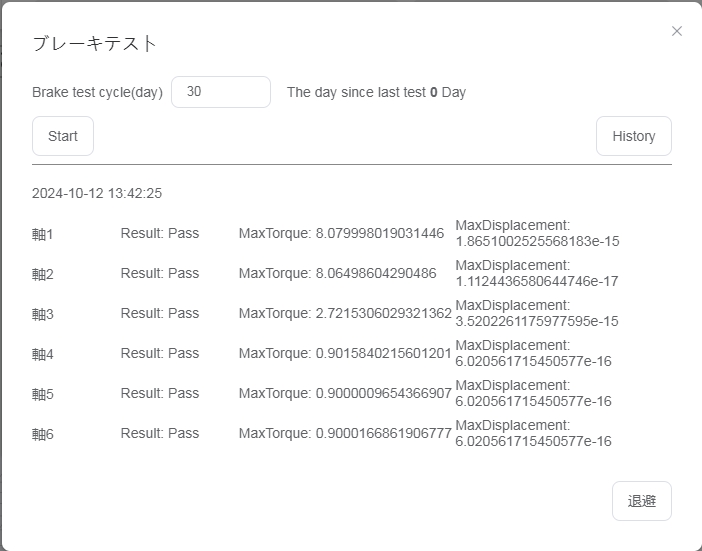
検出開始」ボタンをクリックすると、以下のダイアログボックスが表示され、プロンプトに従って操作を実行します。検出中は、いつでも一時停止や停止ができます。テストが完了すると、ブレーキテストの結果が表示されます。
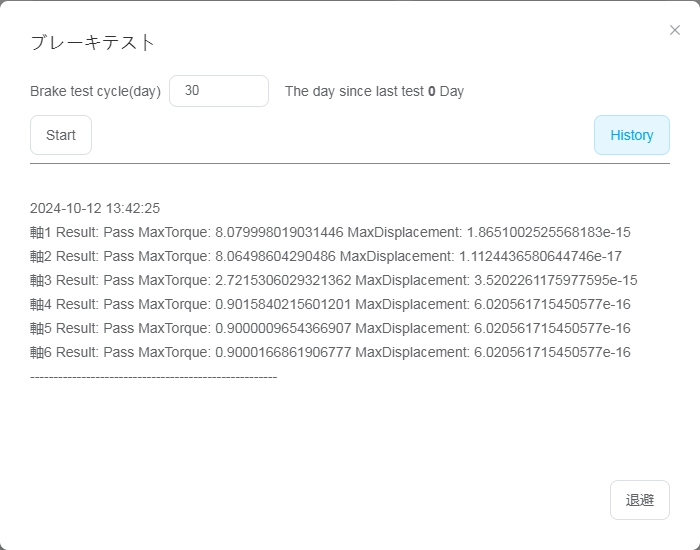
ヒストリカル・データ “ボタンをクリックすると、過去のブレーキ・テストの時間とテスト結果が表示されます。
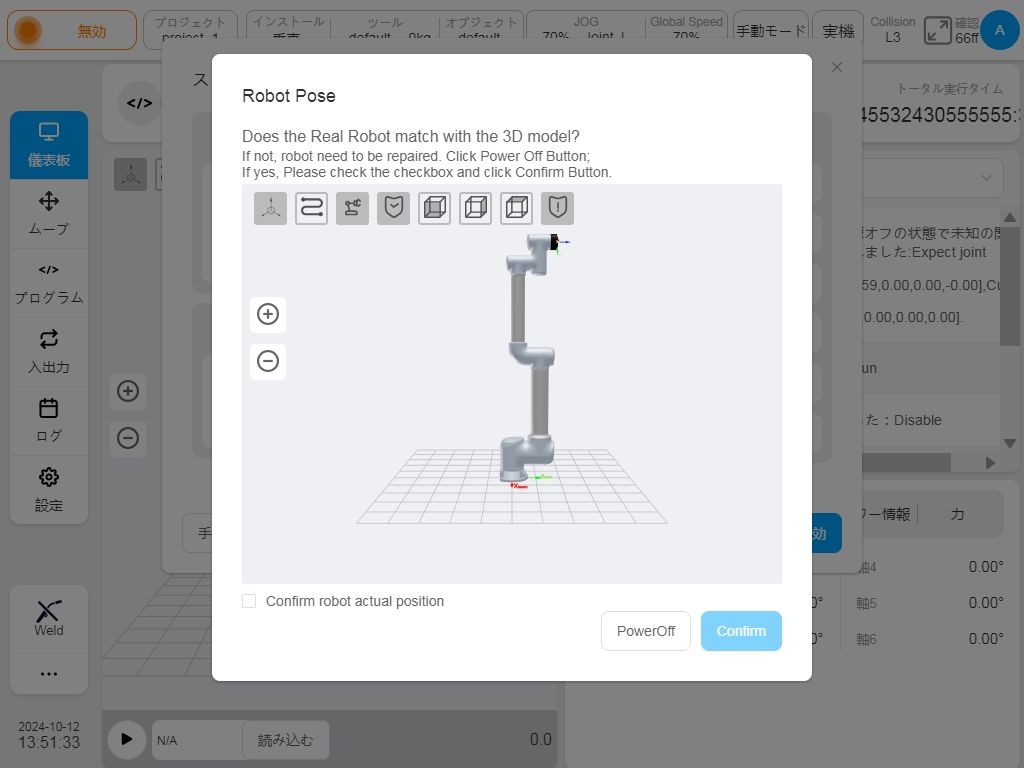
パワーオン・ジョイント位置検証#
ロボットに電源が入ると、電源オフの状態で関節が大きく回転したかどうかを検出し、使用の安全性を確保する。
関節が大きく回転している場合、以下のダイアログボックスがポップアップ表示されます。実際のロボットの姿勢がインターフェイス上の3Dモデルと一致しているかどうかを確認します。Yesの場合は、’Confirm that the posture of the shown above is consistent with the actual robot’をクリックし、’Confirm’ボタンをクリックしてパワーオン操作を続ける。一致していない場合は、’Power off’ボタンをクリックしてロボットの電源を切り、保守担当者に連絡してください。