インターフェースページ#
ナビゲーション・バーの’Interface’ボタンをクリックすると、インターフェース・ページの下にあるI/Oサブ・ページがデフォルトで表示されます。インターフェースページの下にはI/O、レジスタ、CCI、TCI、TCP/IP、産業バスの6つのサブページがあります。制御盤のモデルによって、図のように2種類のページがあります:
DC30Dコントロールキャビネットに適合
DC00 / DC15S-J9 / DC30D-J9 制御盤に適合
ページの上部①はインターフェースページのサブページTABであり、下部②は対応するサブページの表示領域である。ユーザが別のサブページオプションを選択すると、②の領域がそのオプションに切り替わった表示内容に対応する。
入出力#
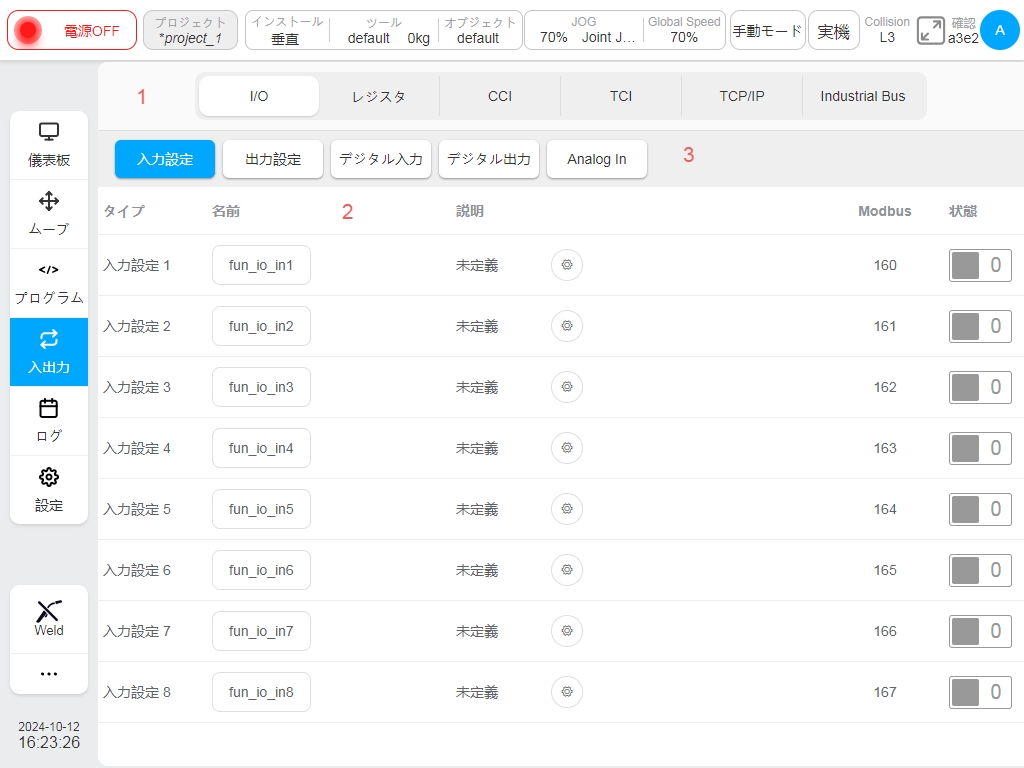
図の②はI/Oサブページの各タブに対応する内容を示し、その上はI/Oサブページの表示エリア、③はI/Oサブページの下に作られた入出力別のラベルである。
DC30D制御盤では、I/Oサブページに機能入力、機能出力、一般入力、一般出力、アナログ入力の5種類があります。異なるラベルバーをクリックすると、5種類の入力または出力のステータス情報が切り替わって表示されます。
機能入力インターフェースは、制御盤内の特定の機能を設定できる8方向デジタル入力の状態と基本情報を監視することができます。ファンクションをクリックして名前を入力します。一般的な仮想キーボードが表示されます。ユーザーはファンクションのデフォルト名を変更することができます。変更した名称を入力すると、名称表示ボックスの右側に①のアイコンが表示されます。アイコンをクリックすると、関数入力名がデフォルト名に戻ります。
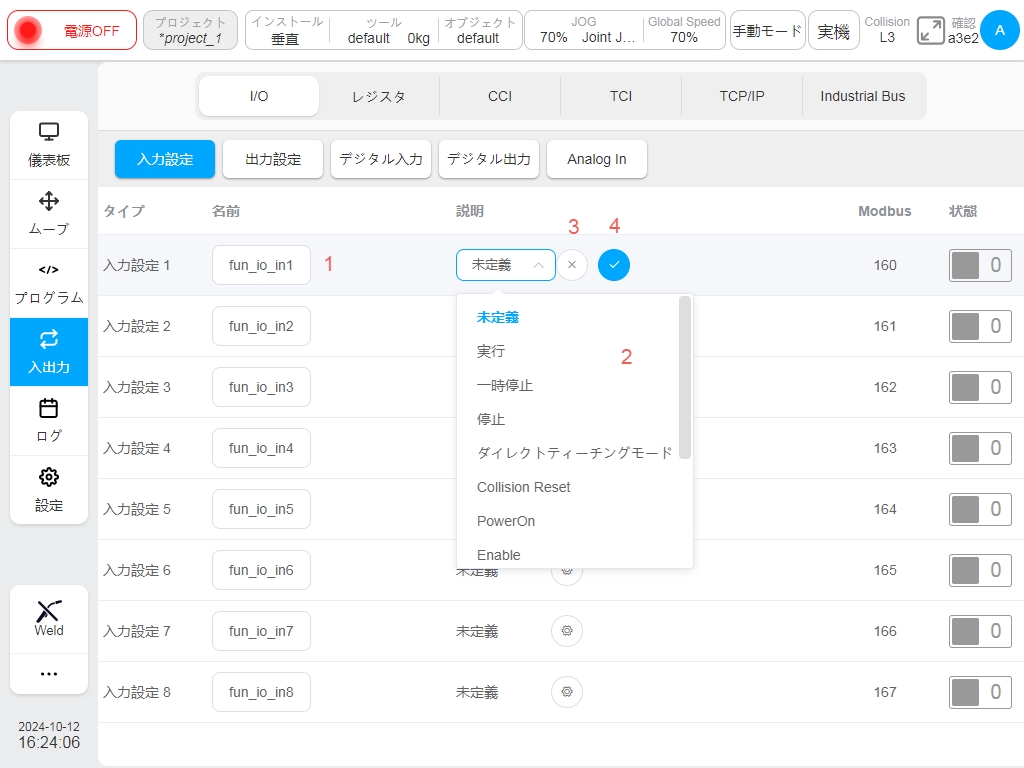
図中の機能入力アイコン②をクリックすると、機能設定セレクタ、アイコン③、アイコン④が表示され、機能入力の機能設定を選択することができます。表示機能セレクタのプルダウンボックスで機能を選択し、設定したい機能項目を入力します。アイコン④をクリックすると、選択した機能項目が決定されます。アイコン③をクリックすると、選択した機能の選択を解除することもできます。機能入力信号がトリガーされると、設定した機能が有効になります。現在、ファンクション入力がサポートしている機能は以下の通りです:Run、Pause、Stop、Teach、Collision reset、Power on、Enable、Disable、Power off、Shutdown、Record pose、Home。
Note
Run、Pause、Stop は立ち上がりエッジのトリガー信号でトリガーされます。
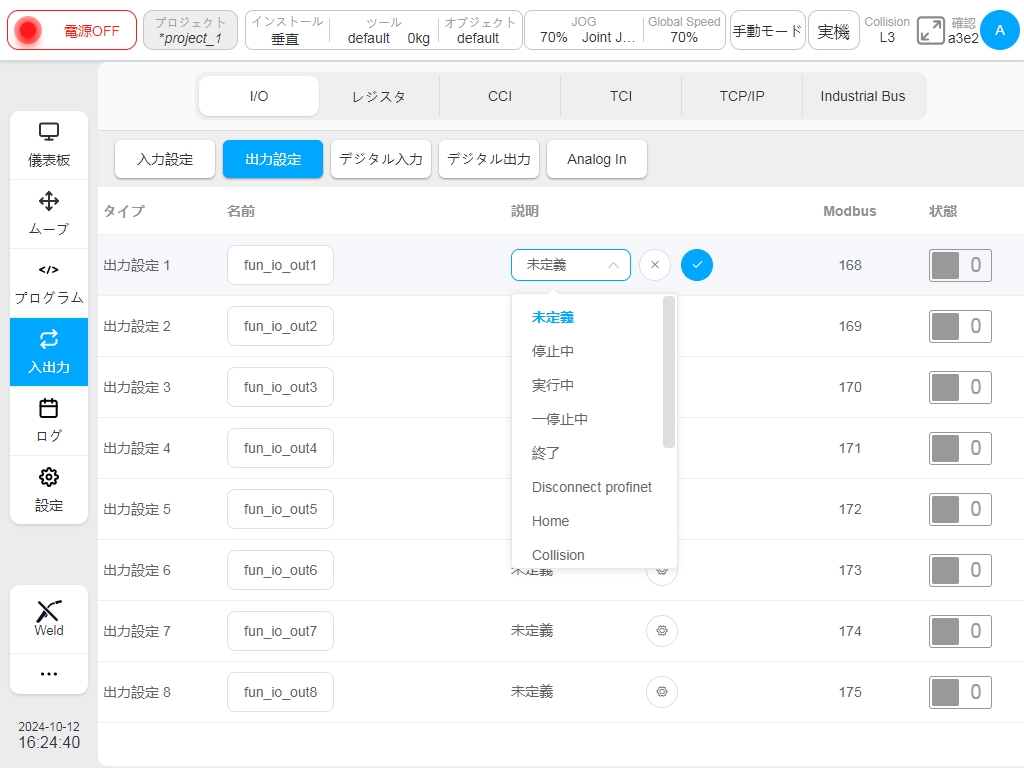
機能出力インターフェースは、図に示すように、コントロールキャビネットの特定の機能を設定することができる8ウェイデジタル出力のステータスと基本情報を監視することができます。機能入力インターフェースと同様に、機能出力の対応する名前を変更し、機能出力の機能設定を選択することができます。機能設定セレクタのドロップダウンボックスで、機能出力にバインドされている定義済みのシステムステータス量を選択します。OK」アイコンをクリックすると、機能出力に設定されたシステムステータス量が反映されます。現在、機能出力はアイドル状態、プログラム実行状態、サスペンド状態、プログラム終了、profinet切断、ホームポジション、衝突、自動モード、電源が入っていない、有効になっていない、ロボット移動、イーサネット切断、ロボット48V電源状態のバインド状態をサポートしている。
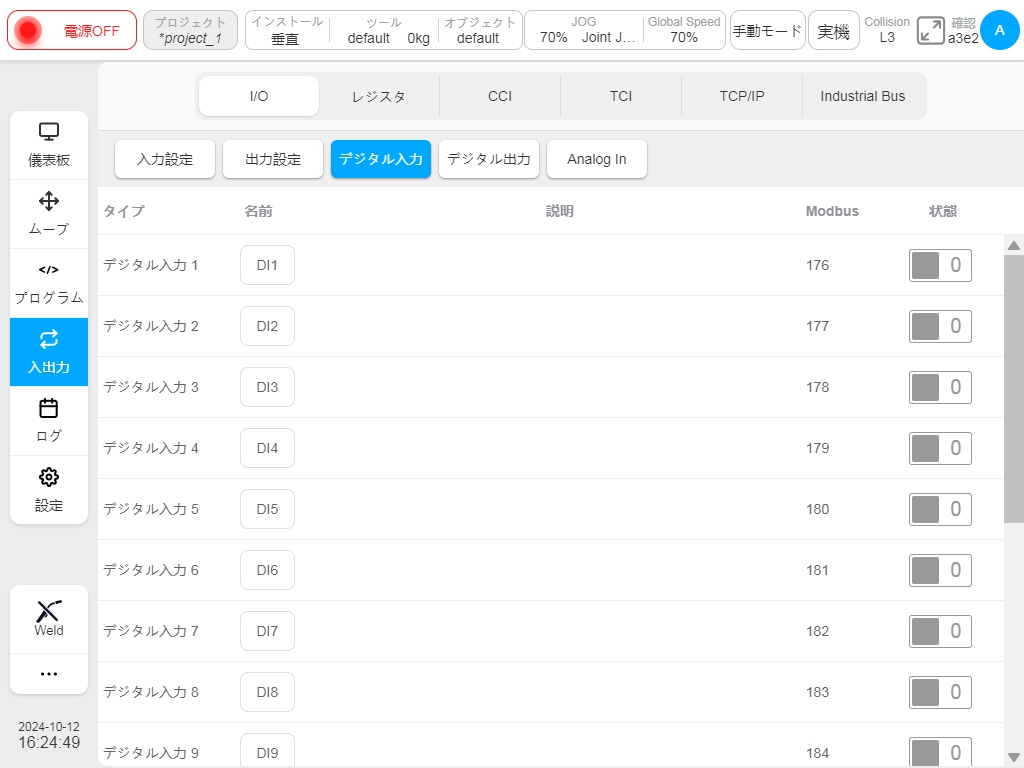
一般入力インターフェースは、図に示すように、制御盤内の通常の16方向デジタル入力の状態と基本情報を監視することができます。機能入力と機能出力のインターフェースと異なり、入力信号の対応する名前と変更された回復だけを変更することができ、特定の機能を設定することはできません。
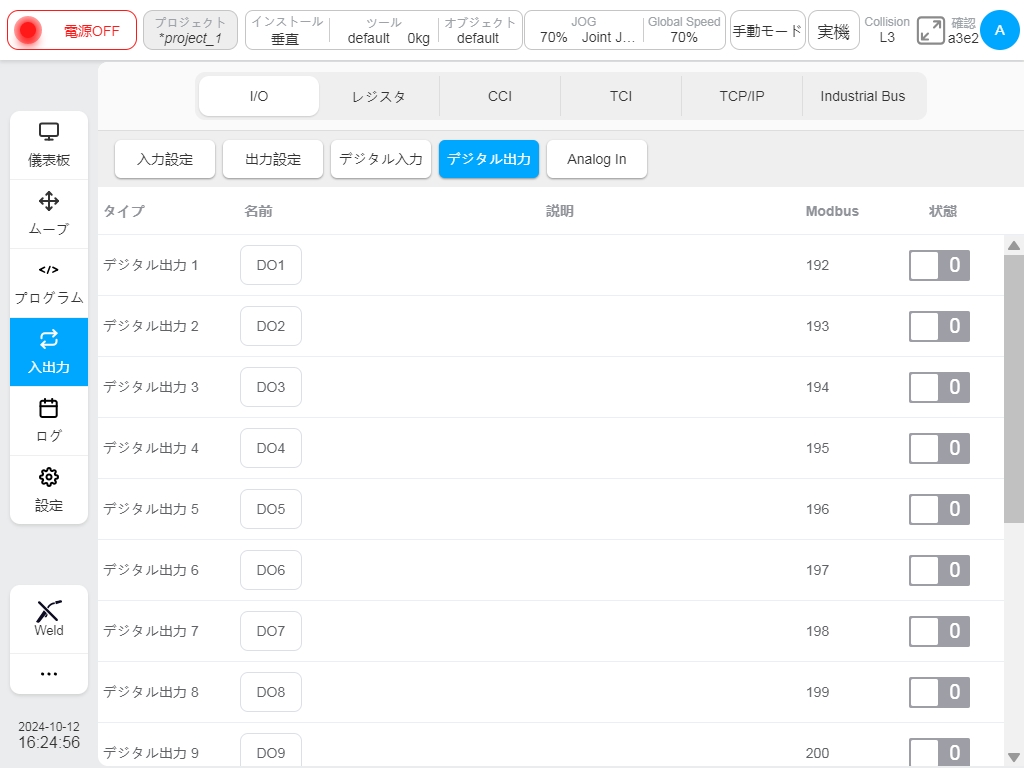
一般出力インターフェースは、図に示すように、制御盤内の通常の16チャンネルデジタル出力の状態と基本情報を監視することができます。インターフェイスは対応する名前を変更し、変更の後で出力信号を元通りにすることだけができ、特定の機能を置くことができません。
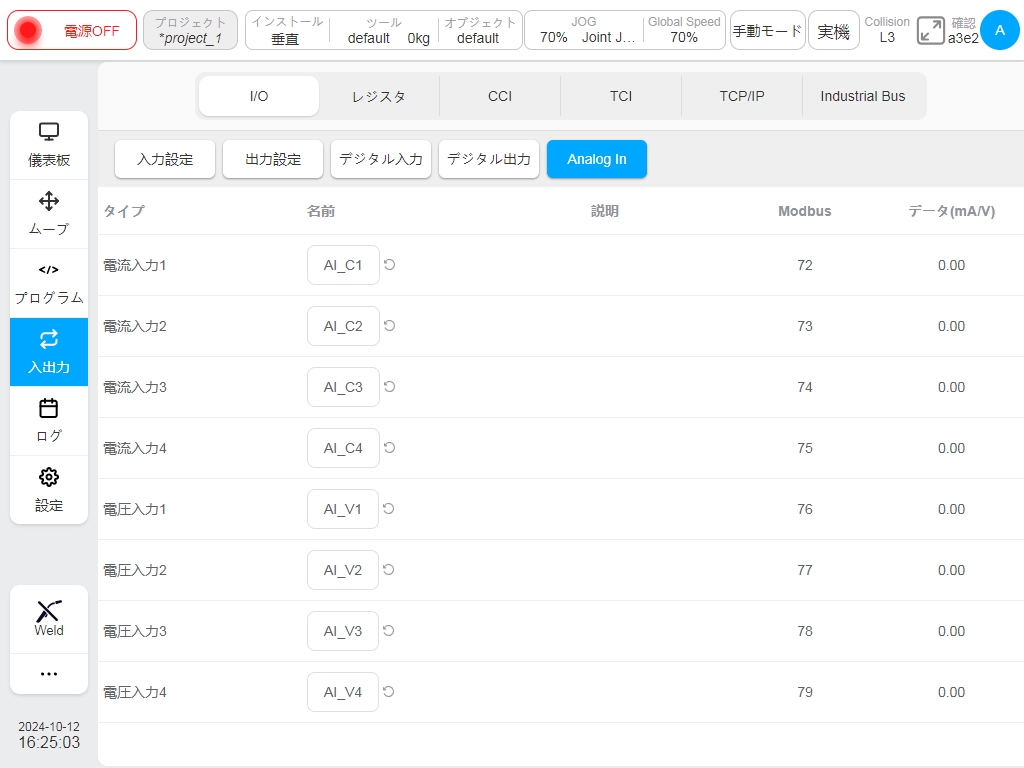
アナログ・インターフェースは、図のように4つのアナログ電流入力信号と4つのアナログ電圧入力信号をモニターすることができます。同様に、アナログ入力信号名表示ボックスをクリックして信号名を変更します。操作は前述の機能I/Oや汎用I/Oと同様なので、ここでは繰り返さない。
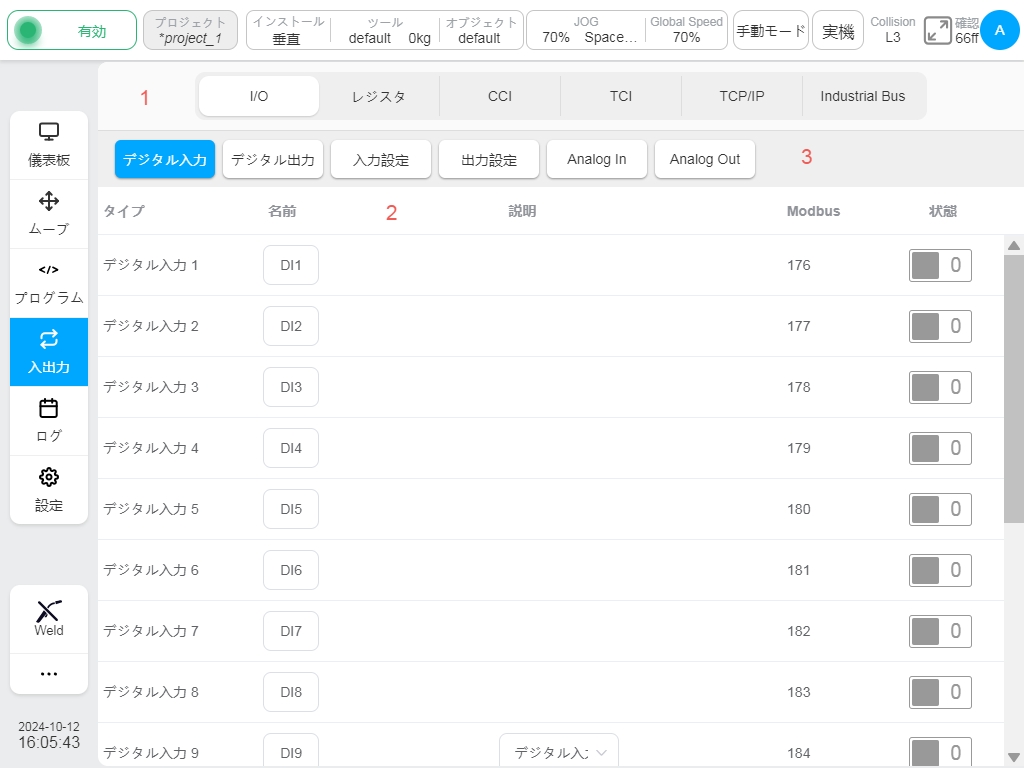
DC00 / DC15S-J9 / DC30D-J9制御盤の場合、I/Oサブページに一般入力、一般出力、ファンクション入力、ファンクション出力、アナログ入力、アナログ出力の6種類があります。異なるラベルバーをクリックすると、6種類の入力または出力のステータス情報が切り替わって表示されます。
一般入力インターフェースは、図に示すように、制御盤内の通常の16方向デジタル入力の状態と基本情報を監視することができます。DI9~DI16の8種類のデジタル入力は、ページの説明欄①でファンクション入力または一般入力として設定することができます。
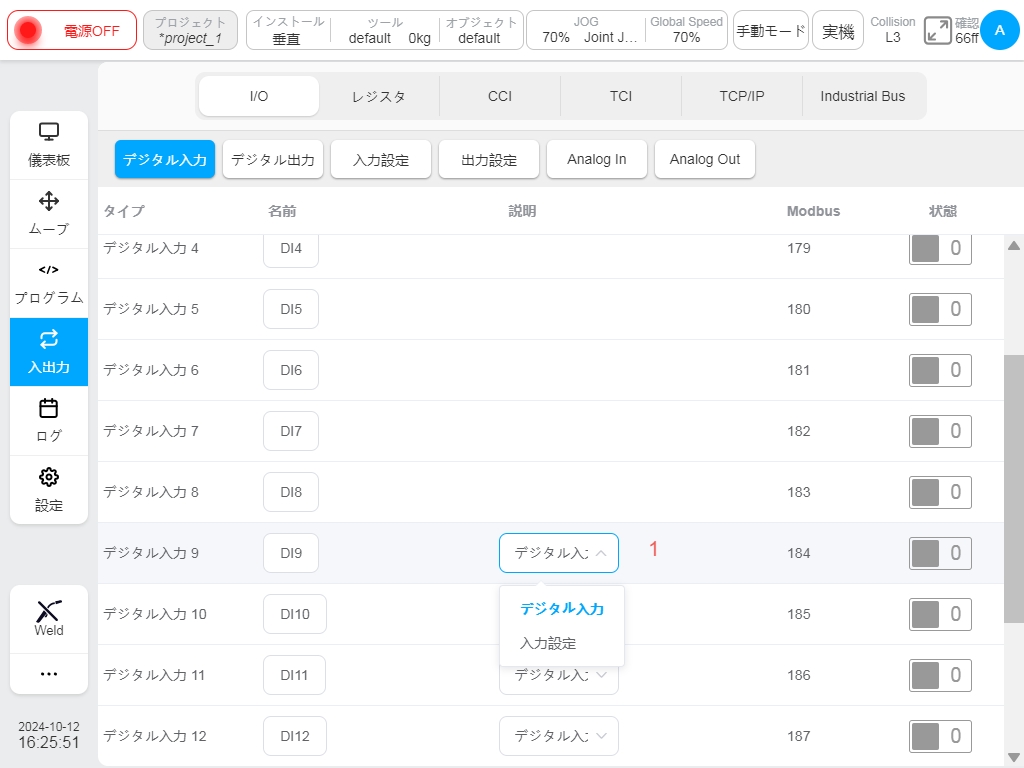
ユーザーが各桁入力を機能入力として選択した場合、I/O一般入力ページでは桁入力ステータスは無効となり、機能入力として設定された桁のステータスが機能入力サブページに表示されます。例えば、DI9とDI10が機能入力として設定されている場合、I/Oサブページの機能入力TABページは下図のようになります。
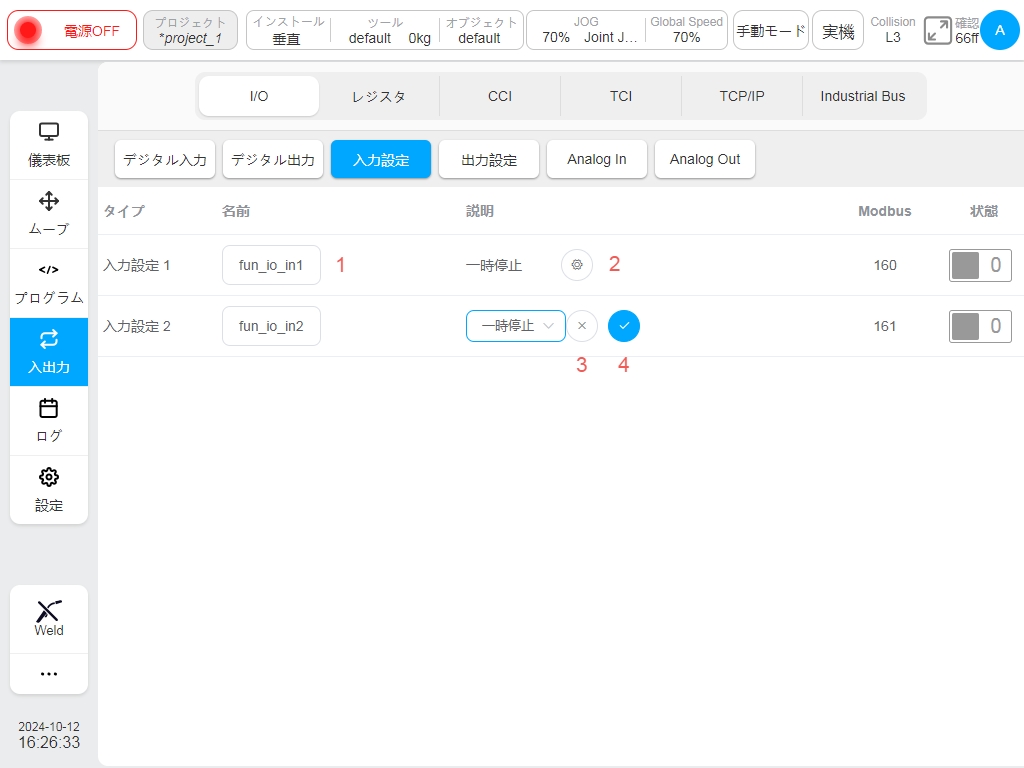
同様に、関数入力名をクリックすると、通常の仮想キーボードが表示され、ユーザは関数入力のデフォルト名を修正することができます。変更した機能のデフォルト名を入力すると、名前表示ボックスの右側に上図の①のアイコンが表示されます。アイコンをクリックすると、関数入力名がデフォルト名に戻ります。
図中の機能入力アイコン②をクリックすると、機能設定セレクタ、アイコン③、アイコン④が表示され、 機能入力の機能設定を選択することができます。表示機能セレクタのプルダウンボックスで機能を選択し、設定したい機能項目を入力します。アイコン④をクリックすると、選択した機能項目が確定します。アイコン③をクリックすると、選択した機能の選択を解除することもできます。機能入力信号がトリガーされると、設定した機能が有効になります。
現在の機能入力は以下の機能をサポートしています:Idle、Running、Paused、Finish、Disconnect profinet、Home、Collision、Auto mode、PowerOff、Disable、Robot moving、Disconnect ethernet、Robot power。
Note
Run、Pause、Stop は立ち上がりエッジのトリガー信号でトリガーされます。
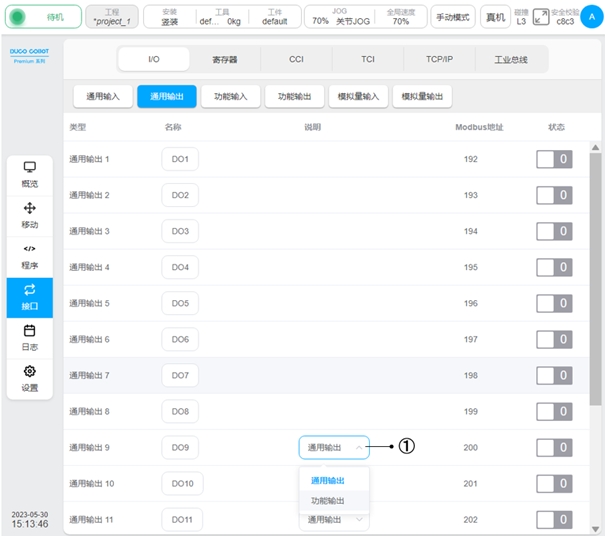
ユニバーサル出力インターフェースは、図に示すように、制御盤内の通常の16チャンネルデジタル出力の状態と基本情報を監視することができます。DO9-DO16のデジタル入力タイプは、ページの説明欄①でファンクション入力または一般入力として設定することができます。
同様に、各一般的なデジタル出力が機能出力として選択されている場合、このパスのデジタル出力はI/O一般出力ページに無効として表示され、機能出力として構成された各パスのデジタルステータスは機能出力サブタブページに表示される。例えば、DO9、DO10、DO11、DO12はファンクション出力として設定されています。下図はI/Oサブページのファンクション出力TABページです。
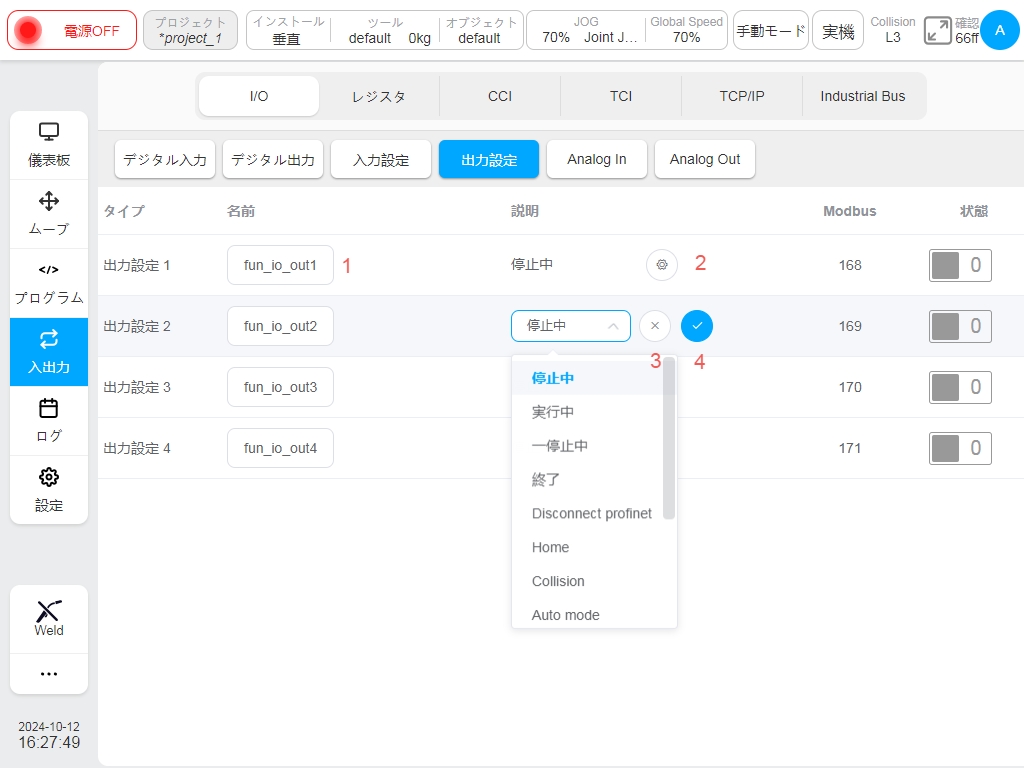
関数入力のTABと同じように、関数出力名をクリックすると、共通の仮想キーボードが表示されます。機能出力のデフォルト名を変更することができます。デフォルトの機能出力名を変更すると、名称表示ボックスの右側に上図の①のアイコンが表示されます。アイコンをクリックすると、機能出力名がデフォルト名に戻ります。
図中の機能出力アイコン②をクリックすると、機能設定セレクタ、アイコン③、アイコン④が表示され、機能出力の機能設定を選択することができます。表示機能セレクタのドロップダウンボックスで、機能出力が設定したい機能項目を選択します。アイコン④をクリックすると、選択した機能項目が確定します。また、アイコン③をクリックすることで、選択した機能の選択を解除することができます。機能出力信号がトリガーされると、設定された機能が開始されます。現在、機能出力は以下の機能をサポートしている:アイドル状態、プログラム実行状態、一時停止状態、プログラム終了、profinet切断、原点、衝突、自動モード、電源が入っていない、有効になっていない、ロボット移動、イーサネット/IP切断、ロボット48V電源状態。
アナログ入力インターフェースでは、図のように2つのアナログ入力信号をモニターすることができます。同様に、アナログ入力信号名表示ボックスをクリックして、信号名を変更します。アナログ入力のデフォルト名称を変更すると、名称表示ボックスの右側に①のアイコンが表示されます。アイコンをクリックすると、アナログ入力の名称がデフォルトの名称に戻ります。また、アナログ入力信号の説明欄のアイコン②で電圧入力か電流入力かを選択することができます。

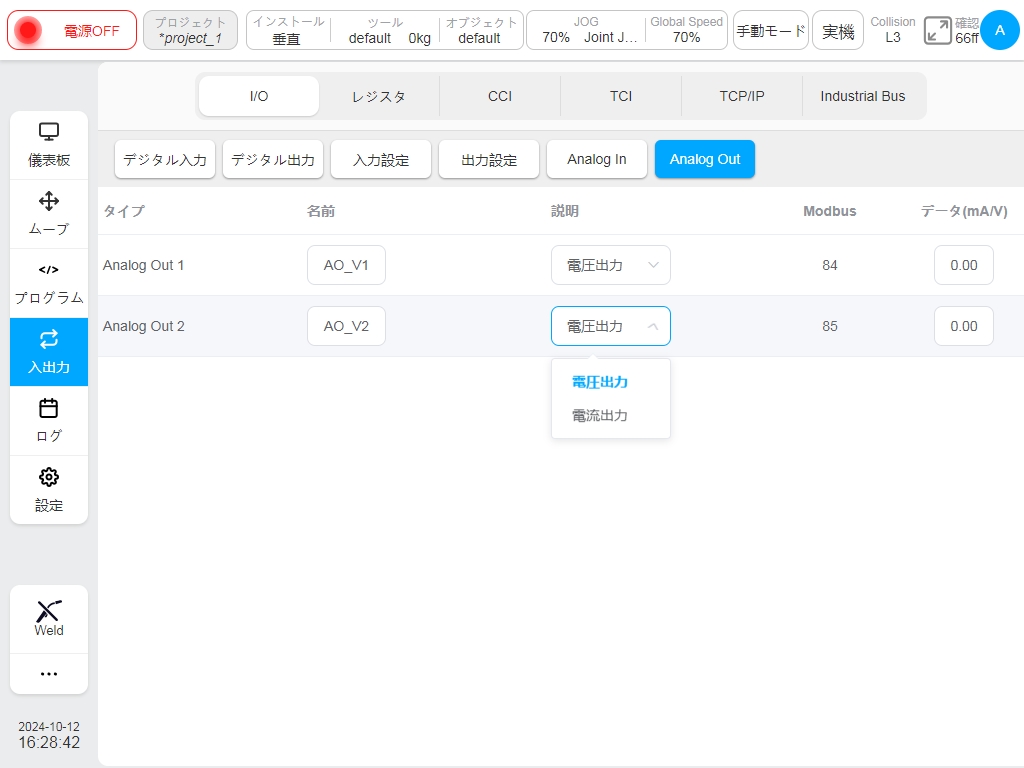
アナログ出力インターフェースでは、図のように2つのアナログ出力信号をモニターすることができます。同様に、アナログ入力信号名表示ボックスをクリックして信号名を変更します。この操作は前述のアナログ入力と同様であり、ここでは繰り返さない。そして、アナログ出力信号は説明欄の構成選択で説明することができ、ユーザーは電圧出力または電流出力を選択することができます。
登録#
レジスタのサブページはI/Oのサブページと似ており、ページの上部には入出力の種類ごとにラベルが貼られている:ファンクション入力、ファンクション出力、ブール入力、ブール出力、ワード入力、ワード出力、フロート入力、フロート出力、合計8種類です。それぞれのタブをクリックすることで、8種類の入出力データ情報の表示を切り替えることができます。
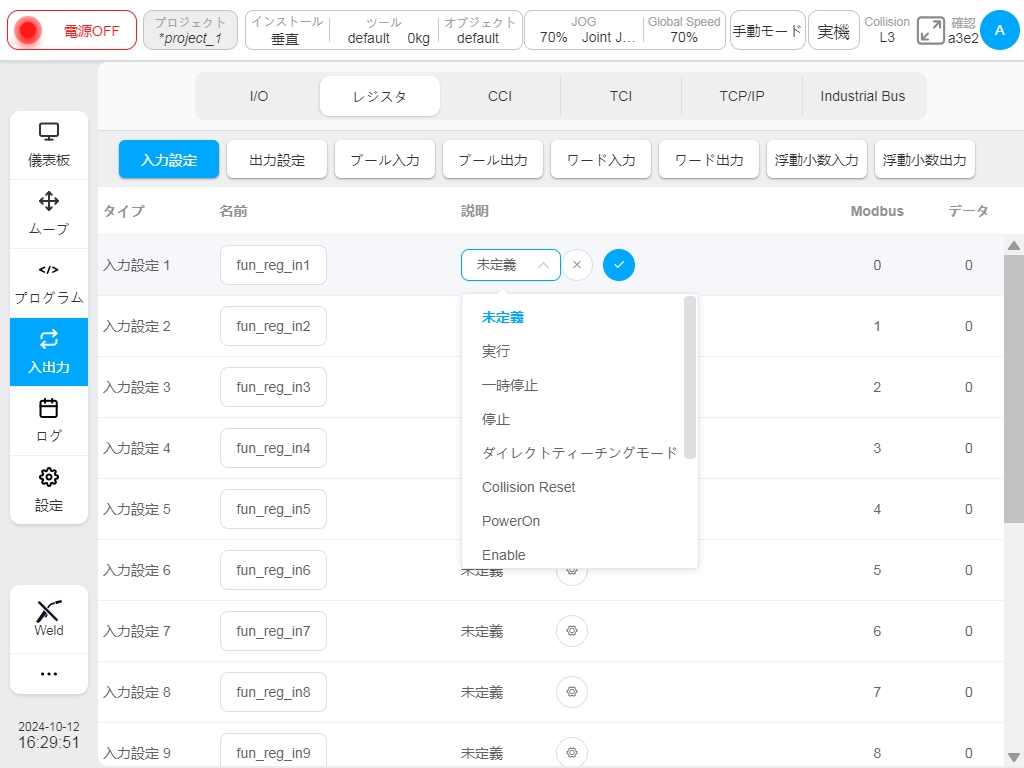
レジスタ機能入力インターフェースは図に示すように、ロボット内部の16個の機能入力レジスタの状態情報を監視することができる。I/Oサブページのファンクション入力と同様に、ファンクション入力名の変更と変更後の復元が可能で、このタイプのレジスタ信号に対して特定のファンクション項目を設定することができる。現在レジスタ機能入力がサポートしている機能項目は、上記I/Oサブページの機能入力サポート機能と同じである。
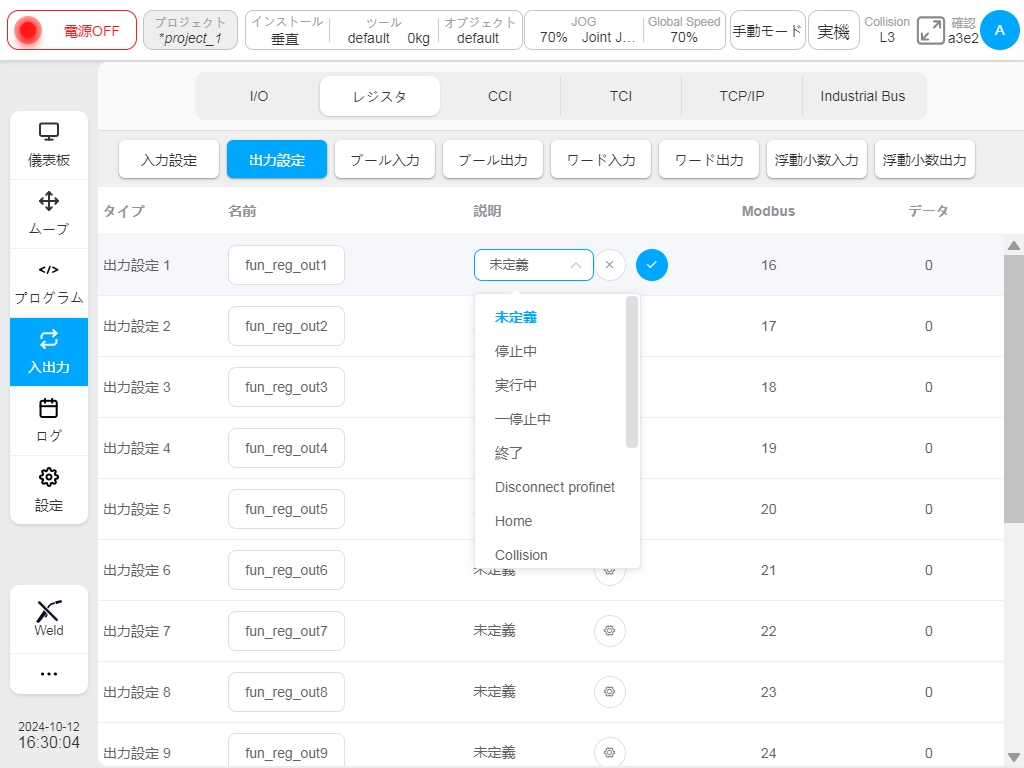
レジスタ機能出力インターフェースは、図に示すように、ロボット内部の16個の機能出力レジスタの状態情報を監視することができる。I/Oサブページの機能出力と同様に、機能出力名は変更可能で、変更後に復元することができ、クラスレジスタ信号は特定のシステム事前定義状態量にバインドすることができる。
現在、レジスタ関数の出力でサポートされているバインド状態は以下の通りです:アイドル、動作中、一時停止、終了、プロフィネット切断、ホーム、衝突、自動モード、電源オフ、無効、ロボット移動、イーサネット切断、ロボット電源。
レジスタ・ブール入力インターフェース 64 個のブール入力レジスタの状態情報を表示する。このインターフェースは、レジスタ名の修正と修正後の復元が可能で、特定の機能項目を設定することはできません。
レジスタ・ブール出力インターフェース 64個のブール出力レジスタのステータス情報を表示する。同様に、このインターフェースはレジスタ名の修正と修正後のリストアのみが可能で、特定の機能項目を設定することはできません。
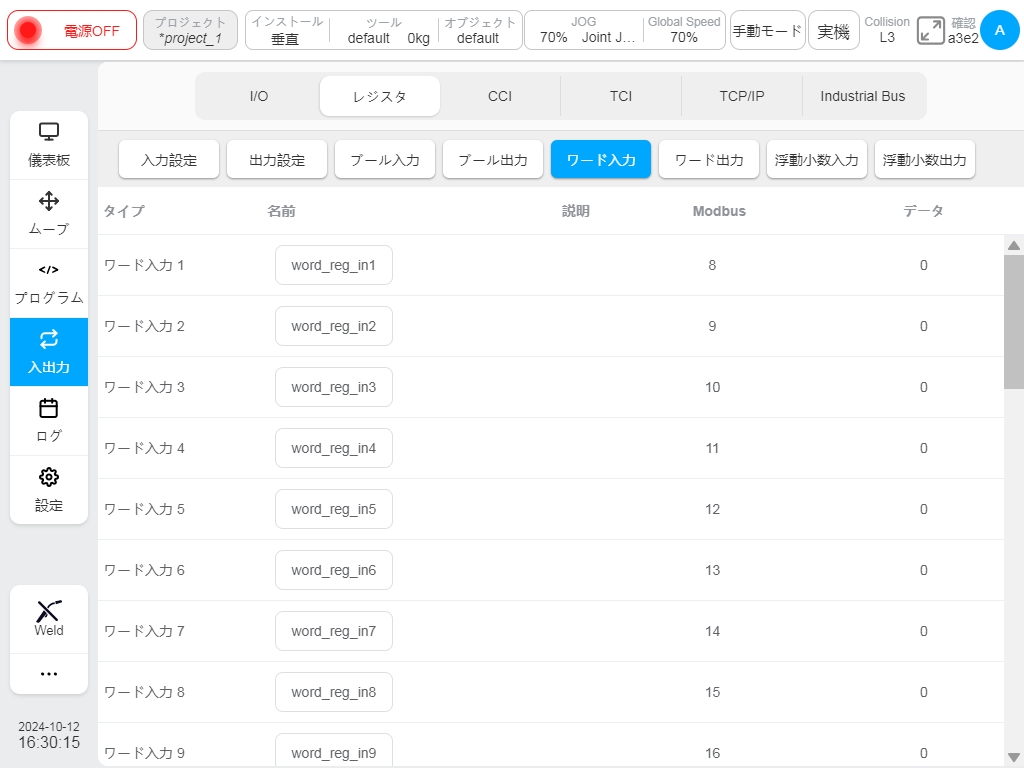
レジスタ Word 入力インターフェースと Float 入力インターフェースはそれぞれ 32 バイト型入力レジスタと 32 浮動小数点型入力レジスタの状態情報を表示します。これらのインタフェースはレジスタ名の変更とリカバリの変更のみ可能で、特定の設定機能を持たず、データ列のデータ表示ボックスを操作することはできません。
レジスタ・ワード出力インターフェースとフロート出力インターフェースは、それぞれ32バイト型出力レジスタと32浮動小数点型出力レジスタのステータス情報を表示します。レジスタ・ブール出力インターフェースと同様に、レジスタ名の修正と修正後の復元が可能で、データ列データ表示ボックスも操作できます。
シーシーアイ#
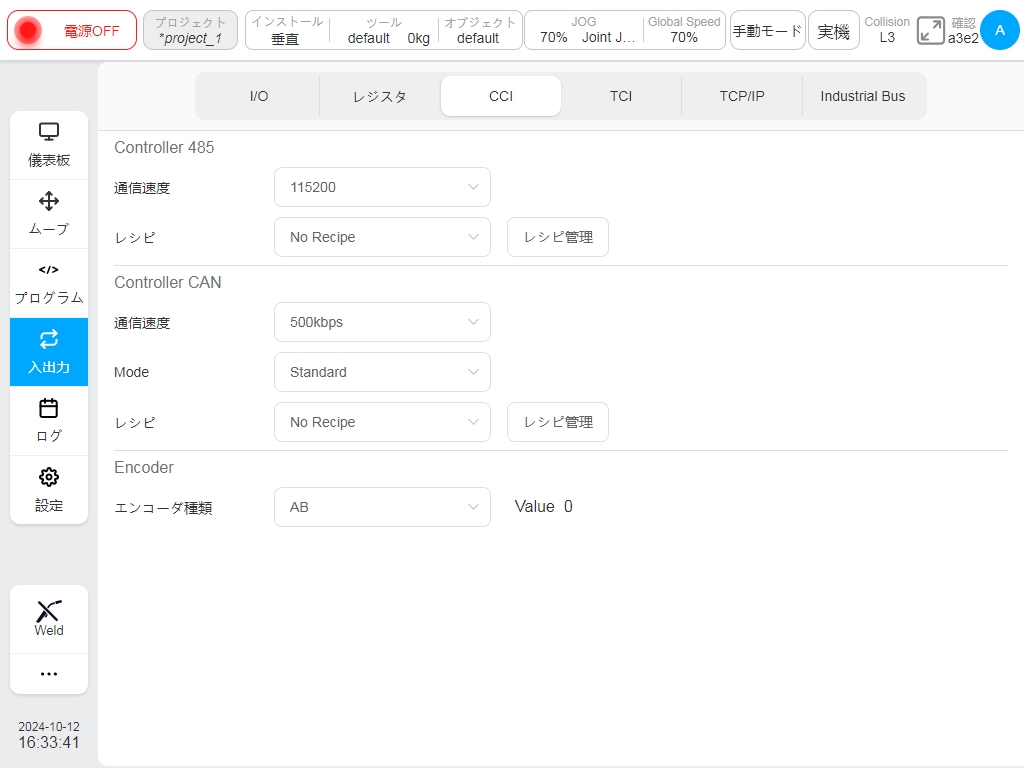
CCI のサブページは制御キャビネットの 485 港、CAN 港およびエンコーダーのインターフェイスを形成します、主にボー・レートおよびモード構成、方式を置き、制御キャビネットの 485 港そして CAN 港のエンコーダーのタイプを置きます。図に示すように
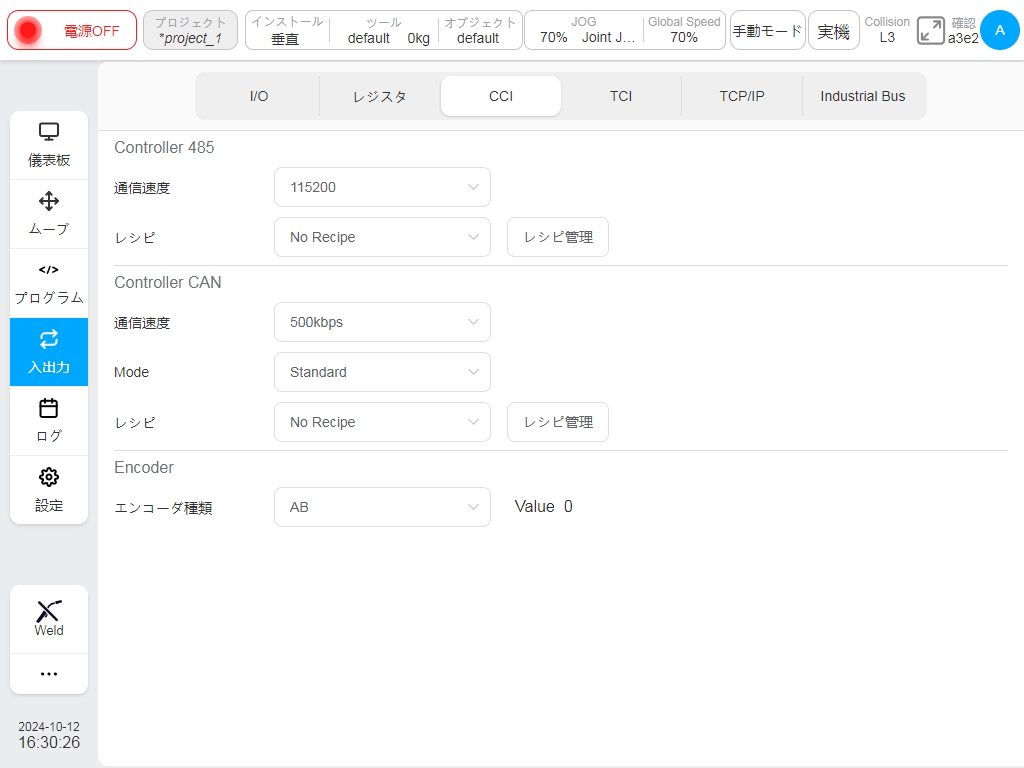
コントロールキャビネットのポート485のボーレートは、ボーレートセレクタのドロップダウンリストから選択できます。ポート 485 は 9600、19200、38400、57600、および 115200 のボーレートをサポートしています。レシピセレクタドロップダウンボックスでポートのレシピファイルを選択します。
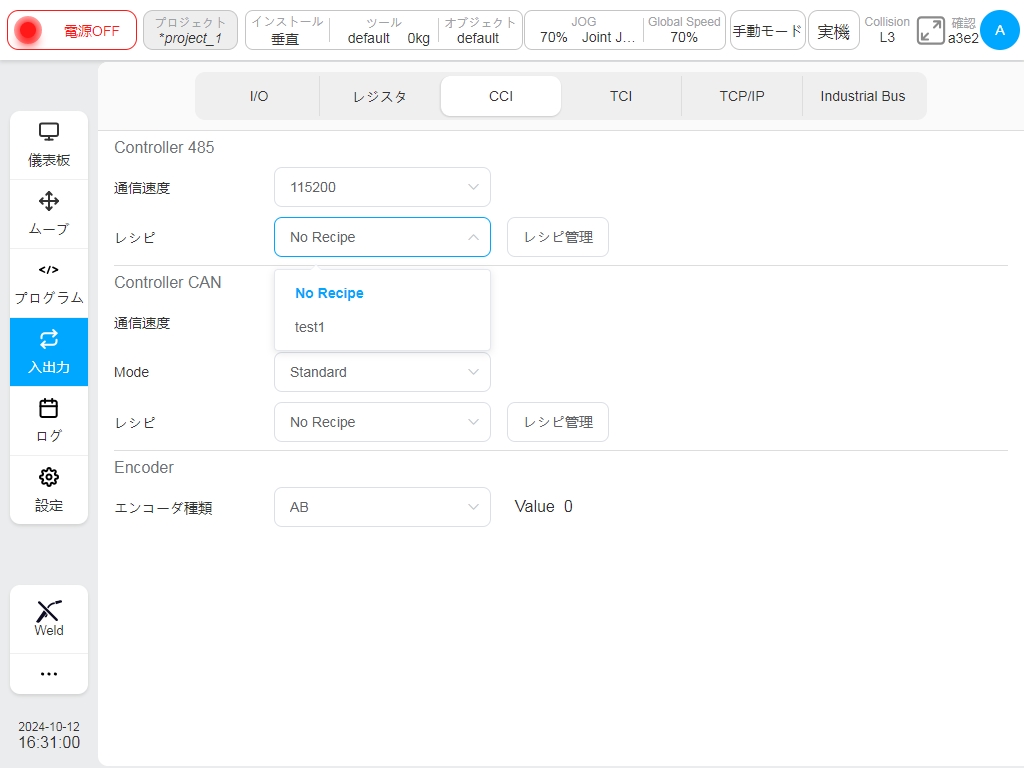
上の画像のように、ドロップダウンボックスにはユーザーが定義したレシピファイル名が表示されます。数式管理’ボタンをクリックすると、数式管理リストボックスが表示されます。このインターフェイスは、現在のプロジェクトに存在する数式ファイルを表示します。ユーザーは配合を追加、削除、編集することができます。
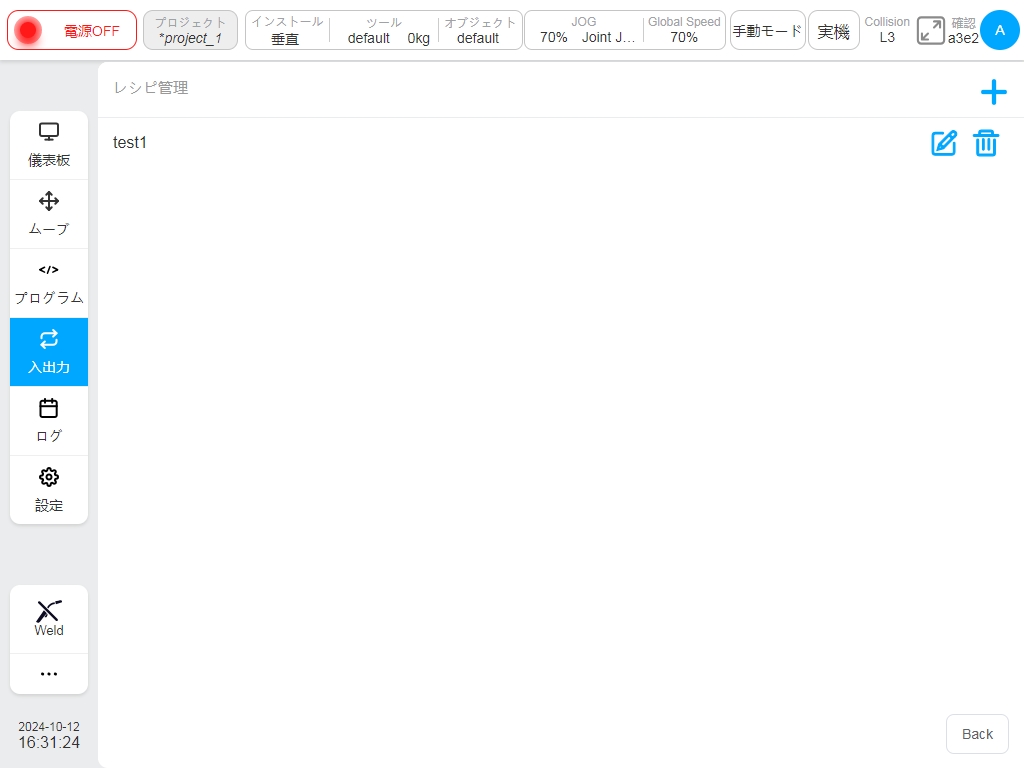
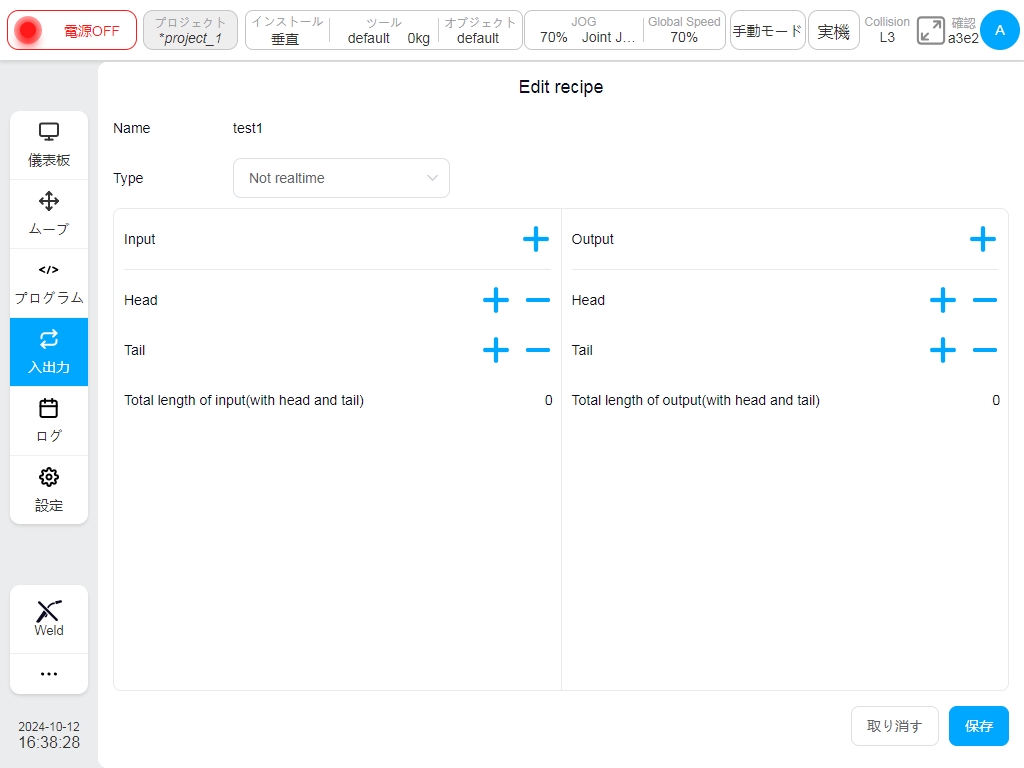
レシピリスト内のレシピファイルをクリックすると右側に’編集’と’削除’ボタンを含むポップアップボックスが表示されます。ユーザーは既存のレシピファイルを修正または削除することができます。
コントロールキャビネットのCANポートのボーレートと計算式の設定は、485ポートのものと同様であるため、ここでは説明しない。CANポートのボーレートは、10kbps、20kbps、50kbps、100kbps、125kbps、250kbps、500kbps、1000kbpsです。CANの構成には、標準フレームと拡張フレームの2つのモードがあります。
コントロールキャビネットのエンコーダ構成には、ABとABZの2種類があります。現在のシステムで記録されているエンコーダパルス数は、エンコーダの右側に表示されます。エンコーダタイプがABZに設定されている場合、ユーザーはエンコーダラインの数も設定する必要があります。デフォルト値は0です。
TCI#
TCIサブページには、エンドボードのIO情報、再利用可能なインターフェース関連情報が表示される。エンドボードには2チャンネルのツール入力と2チャンネルのツール出力があり、これらはI/Oサブページの汎用入出力信号と同じです。このインターフェースにより、ユーザーはツール入力とツール出力の名称を変更し、変更後にデフォルトの名称に戻すことができます。
ユーザーは工具出力モードを設定することができ、2チャンネル工具出力設定モードは強制的に統一されます、つまり、任意の工具出力モードをPNPモードまたはNPNモードに設定し、他の工具出力モードはそれに応じて変更されます。
図に示すように、0は低レベル電子、1は高レベル電子を意味します。
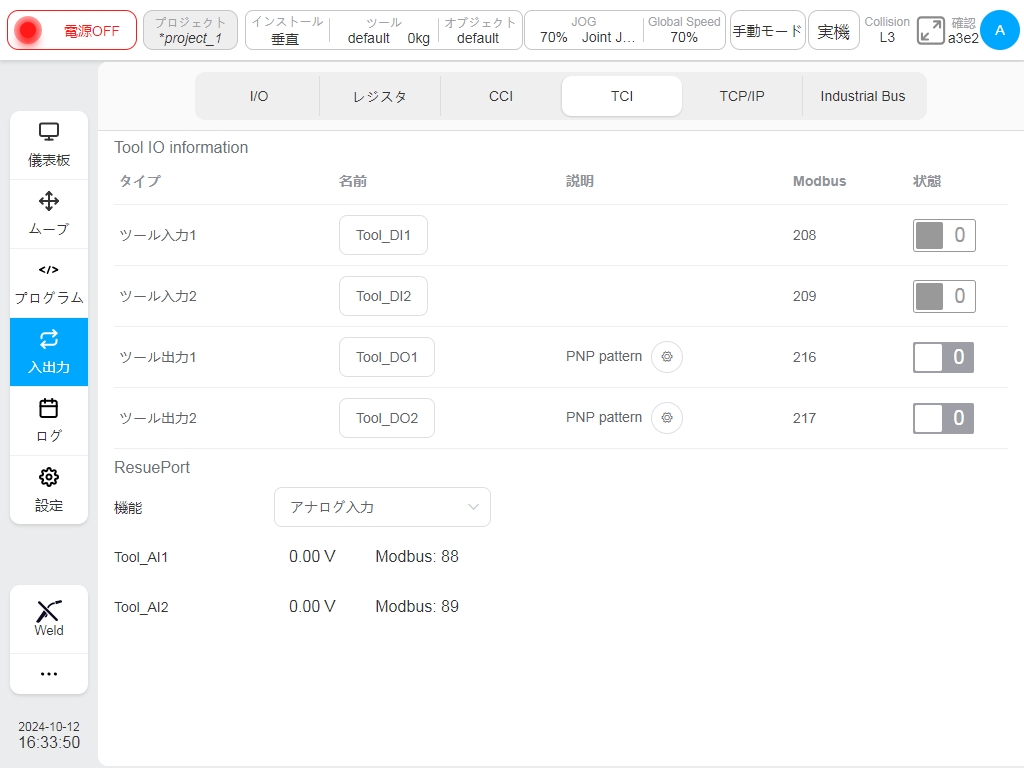
使用する前に、ユーザーは端末インターフェース機能がアナログ入力か485インターフェースかを設定し、設定に従って対応する信号を取得することができます。上図に示すように、端末インターフェース機能がアナログ入力に設定された場合、インターフェースは2つのアナログ電圧入力のデータと対応するModbusアドレスをリアルタイムで表示します。末端インターフェースが485に設定された場合、インターフェースは次の図のようにボーレートと数式設定情報を表示します。
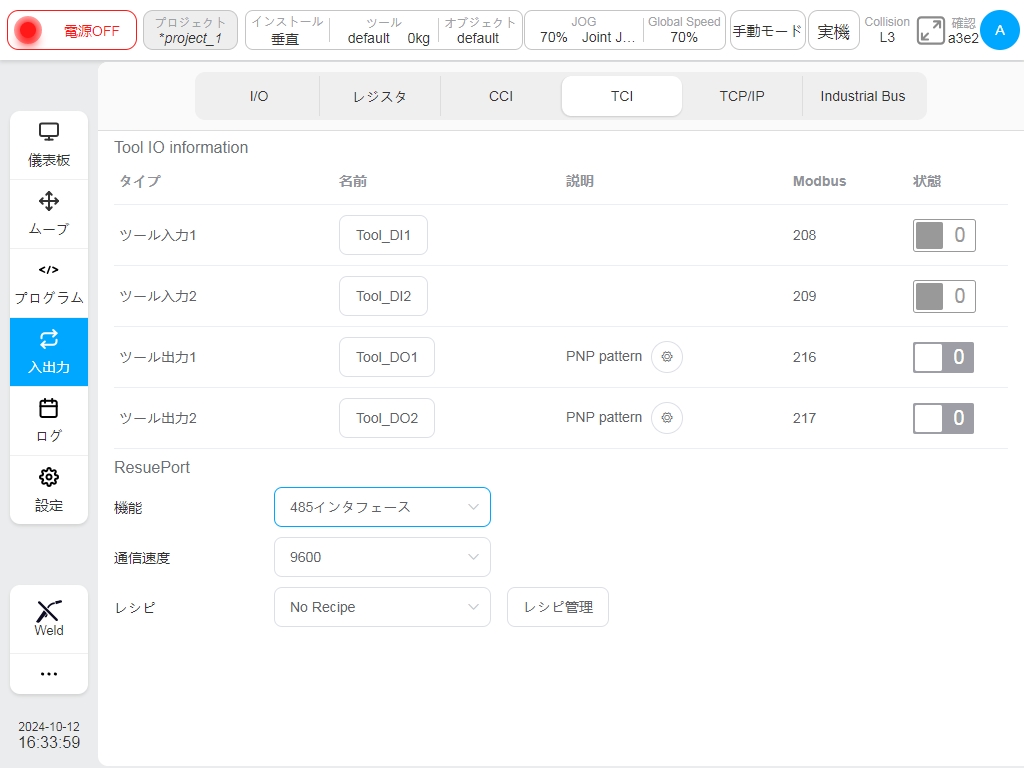
ボーレートと計算式は末端の 485 インターフェースで設定できる。具体的な操作はCCIサブページの制御盤の485ポートの設定と同様であるが、ここでは説明しない。
ティーシーピー・アイピー#
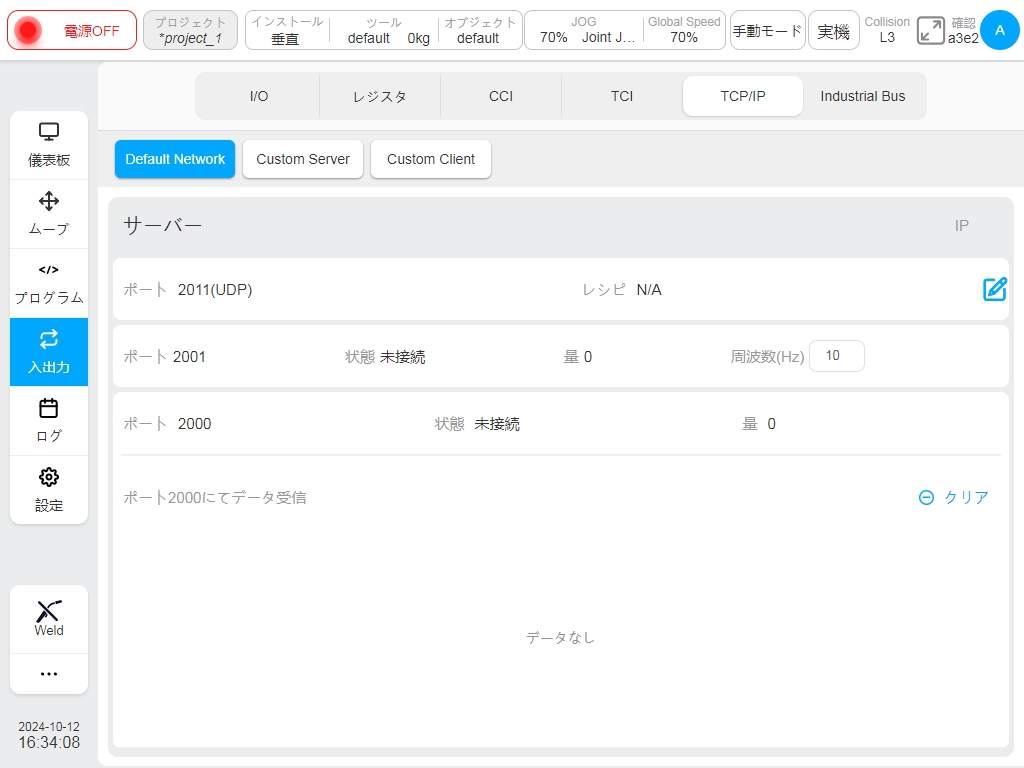
TCP/IPサブページは主にロボットの外部TCP/IP接続情報を表示する。 主に3つのサブタブがあります:デフォルトネットワーク、カスタムサーバ、カスタムクライアント。
デフォルトのネットワークサブタブページには、サーバーとしてのポート 2000、2001、および 2011 に関する情報が表示されます。 システム IP、2000、2001 ポートの接続状態と接続数を表示します。
Note
サーバーに表示される IP アドレスは、LAN1 ネットワークポントの IP アドレスに対応しています。LAN1 のアドレス設定については、「Netwotk の設定」を参照してください。
ポート2000はロボットの制御コマンドを受信できる。ポート2000が受信した情報はページ下部に表示される。
デフォルトでは、ポート2001は10Hzの周波数でロボットの現在のステータス情報を送信します。
ポート2011はUDPポートで、レシピで設定されたデータ項目を通してロボットを制御することができます。
ポート2000とポート2001の使用方法については、協働ロボットの外部通信インタフェースの説明を参照してください。
ポート2011の使い方については、レシピの説明を参照のこと。
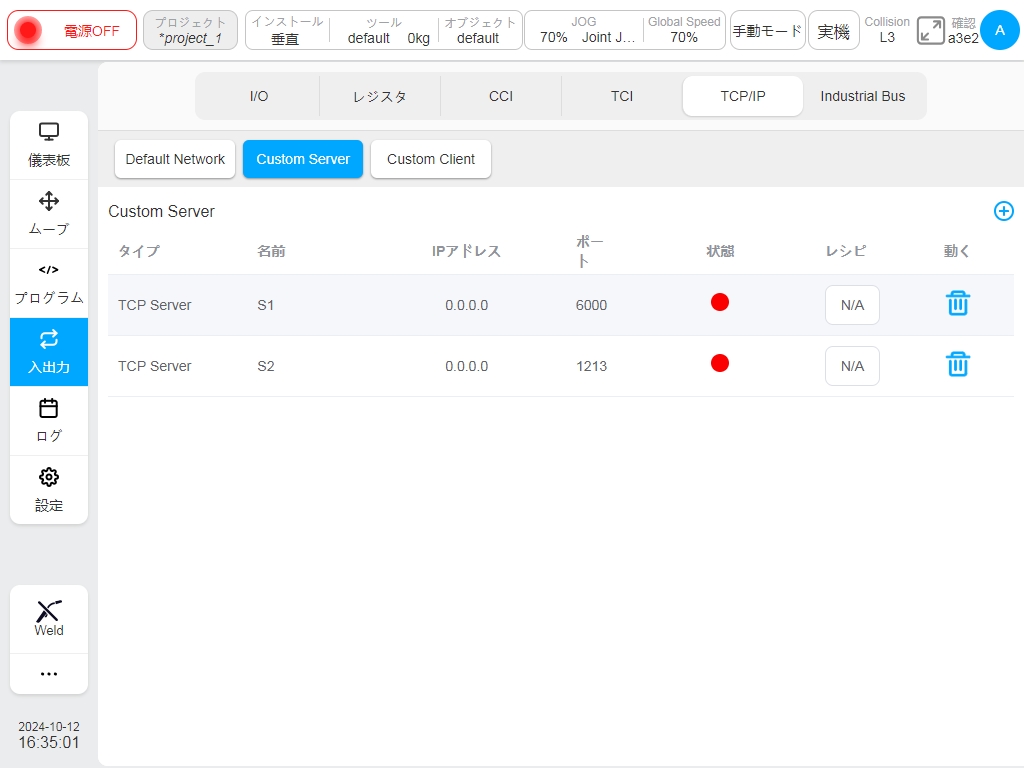
カスタムサーバーサブタブには、ユーザーが作成したソケットサーバーの一覧が表示されます。カスタムサーバーの種類、名前、接続クライアントのIPアドレス、ポート、接続ステータス、レシピ、操作アイコンが表示されます。
接続ステータスのランプが緑の場合、ステータスランプの右側にある “Disconnect “ボタンをクリックすると接続を切断できます。
レシピボタンをクリックしてレシピを設定し、アクション欄の  アイコンをクリックして追加したカスタムサーバーを削除します。
ページ右上の
アイコンをクリックして追加したカスタムサーバーを削除します。
ページ右上の  アイコンをクリックすると、接続を追加するポップアップウィンドウが表示され、名前とポート番号を入力し、”OK “ボタンをクリックすると、カスタムサーバーが追加されます。
アイコンをクリックすると、接続を追加するポップアップウィンドウが表示され、名前とポート番号を入力し、”OK “ボタンをクリックすると、カスタムサーバーが追加されます。
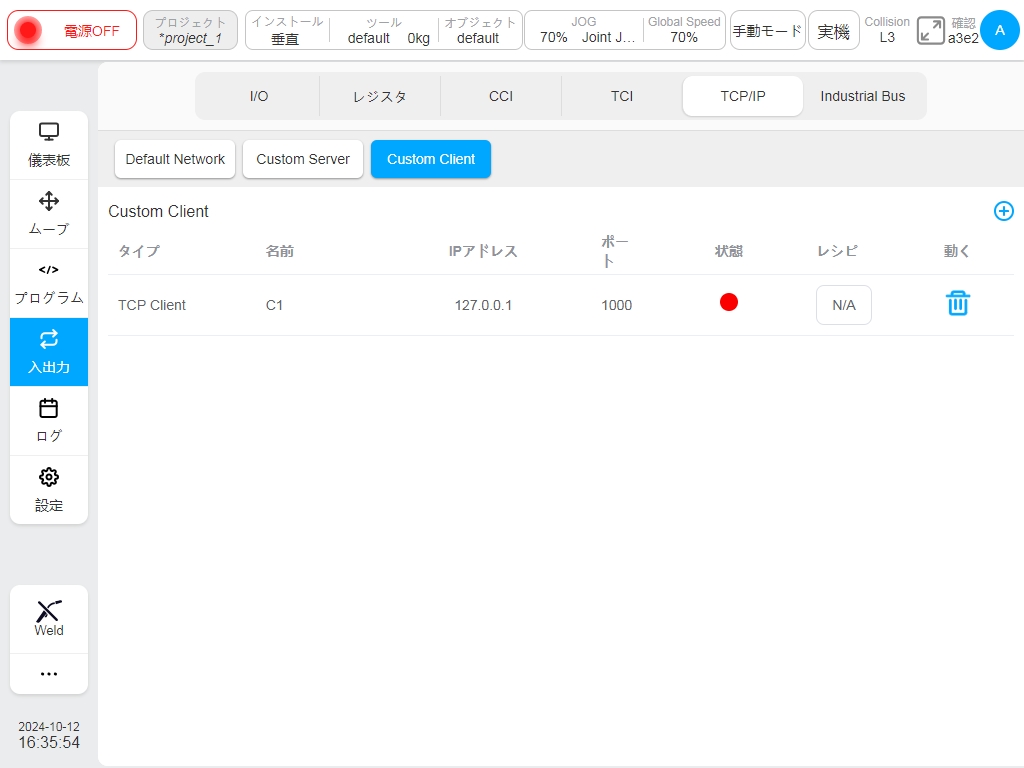
カスタムクライアントサブタブには、カスタムクライアントのタイプ(TCP/UDP)、名前、IPアドレス、ポート、レシピ、操作アイコンを含む、クライアントとしてのロボットのすべての接続情報が表示されます。
レシピボタンをクリックしてレシピを設定し、動作欄 アイコンをクリックして追加されたカスタムクライアントを削除する。
接続は、スクリプトを使用するか、ページの右上にある アイコンをクリックして構築することにより、プログラム内で確立することができます。
アイコンをクリックすると以下のダイアログボックスが表示されますので、接続情報を入力し、”OK “ボタンをクリックして接続を作成します。

産業バス#
産業バスのサブページには主に3つのサブタブがあります:Modbus/TCP、Profinet、Ethernet/IP。
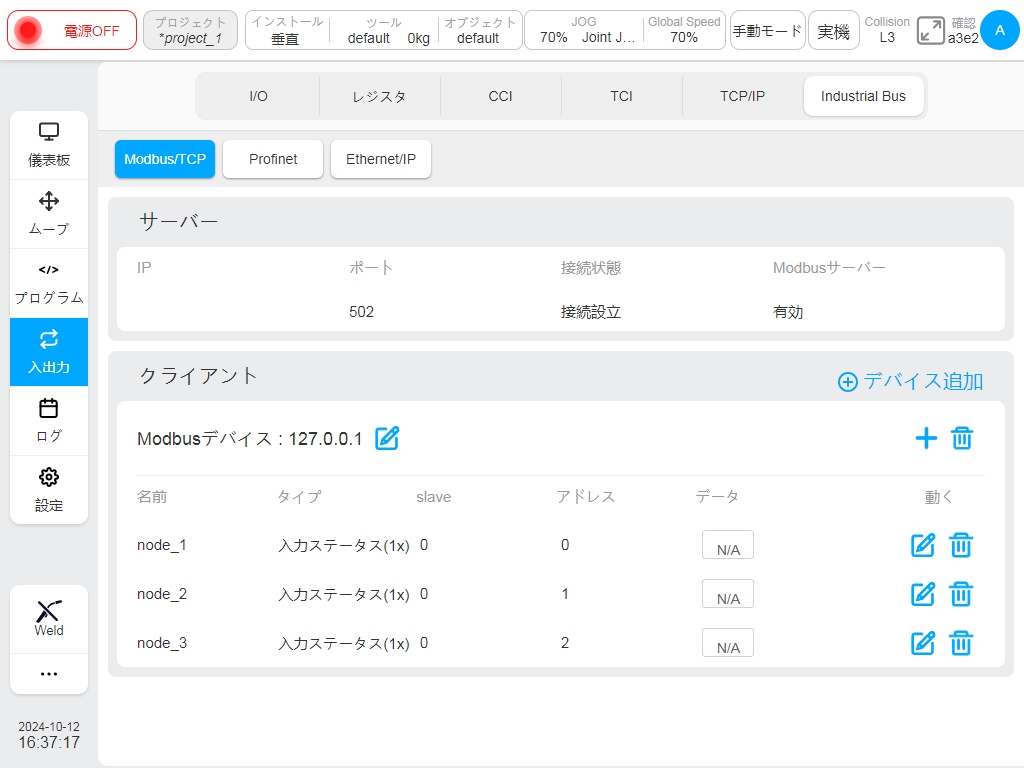
ロボットの電源が入っているとき、ロボットは外部 Modbus クライアントの接続状態を監視する Modbus サーバーとして機能する。 Modbus/TCP TABは図のようにロボットの外部Modbus/TCP通信インターフェースの情報と操作を表示する。

ModbusサーバーのシステムIPアドレス、ポート番号、接続ステータスがインターフェイスの上部に表示されます。 Add Device をクリックします。仮想コモンキーボードが表示されます。外部 Modbus クライアント機器の IP アドレス、例えば 192.168.218.163 を入力します。 Modbus デバイス IP アドレスと関連 ICONS がインターフェイスに表示されます。

アイコン  をクリックすると、図のように New Modbus node ウィンドウが表示されます。ノード名、ノードタイプ、スレーブ番号、オフセットアドレスと長さを入力します、
OK’ボタンをクリックして確定します。ノードタイプは4種類あります:リードオンリーコイル(1x)、リードライトコイル(0x)、リードオンリーレジスタ(3x)、リードライトレジスタ(4x)。
をクリックすると、図のように New Modbus node ウィンドウが表示されます。ノード名、ノードタイプ、スレーブ番号、オフセットアドレスと長さを入力します、
OK’ボタンをクリックして確定します。ノードタイプは4種類あります:リードオンリーコイル(1x)、リードライトコイル(0x)、リードオンリーレジスタ(3x)、リードライトレジスタ(4x)。
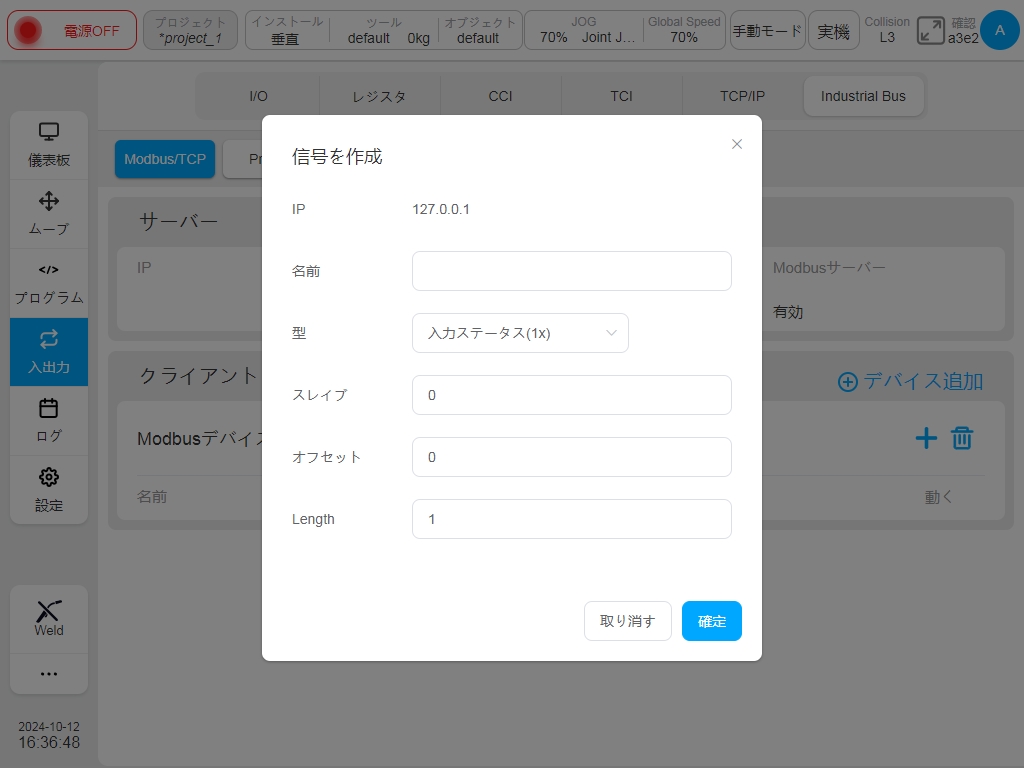
ノードを作成するときの長さは、デフォルトでは1である。長さが 1 の場合、1 つのノードが作成されます。長さが1より大きい場合は、複数のノードが一括して作成されます。 長さを3に設定した場合、長さに応じてノード名にアンダースコア(_)を付けます。つまり、図のように、ノード_1、ノード_2、ノード_3となり、アドレスは0、1、2の順になります。

新しいノードが作成されると、新しく定義されたノードに関する情報がインターフェイスに表示されます。データ列にデータが表示されていない場合は、N/Aが表示されます。
ユーザーは各ノードを修正または削除することができます。対応するノード行のボタン  をクリックすると、新規ノード作成時と同様のポップアップ・ウィンドウが表示されます、
ただし、ノード名は変更できず、長さは表示されず、ノードタイプ、スレーブ番号、オフセットアドレスは変更できます。
をクリックすると、新規ノード作成時と同様のポップアップ・ウィンドウが表示されます、
ただし、ノード名は変更できず、長さは表示されず、ノードタイプ、スレーブ番号、オフセットアドレスは変更できます。
ユーザーは新しく作成された Modbus デバイスの IP アドレスを変更できます。Modbus デバイスの IP アドレスの後にアイコン をクリックすると、仮想共通キーボードがポップアップします、
ターゲットIPアドレスを入力します:192.168.218.168.OK “ボタンをクリックした後、インターフェイスは次のように表示されます。
ModbusデバイスのIPアドレスが変更された後、新しいIPアドレスのノード情報はIPアドレスが変更される前と同じです。
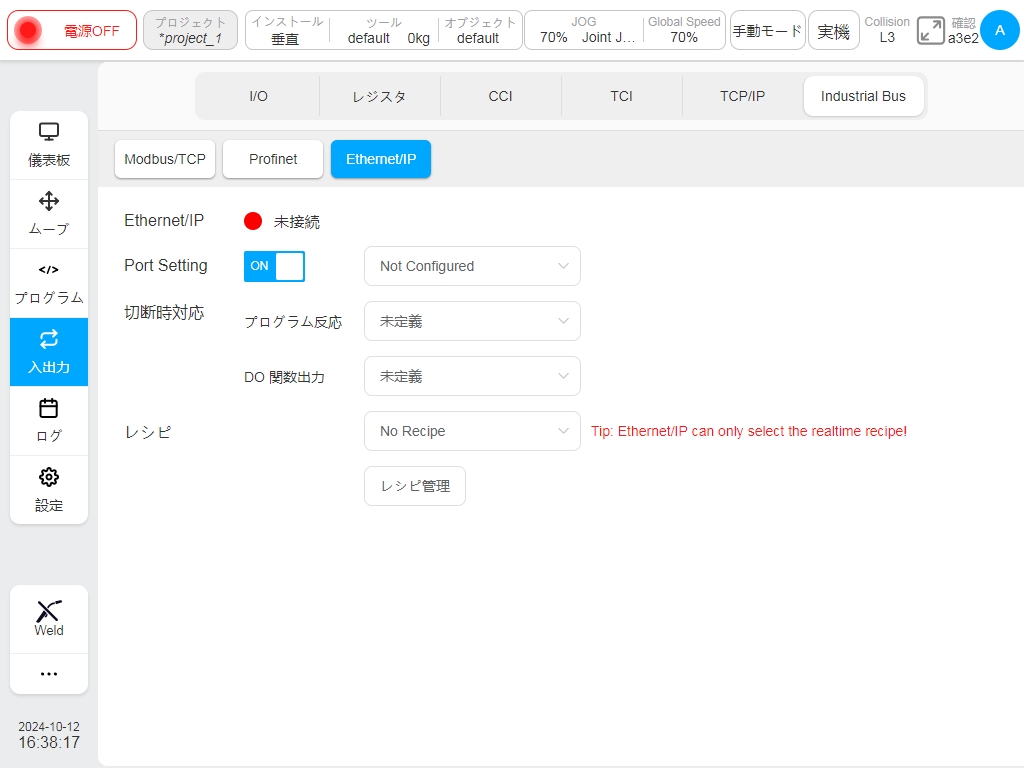
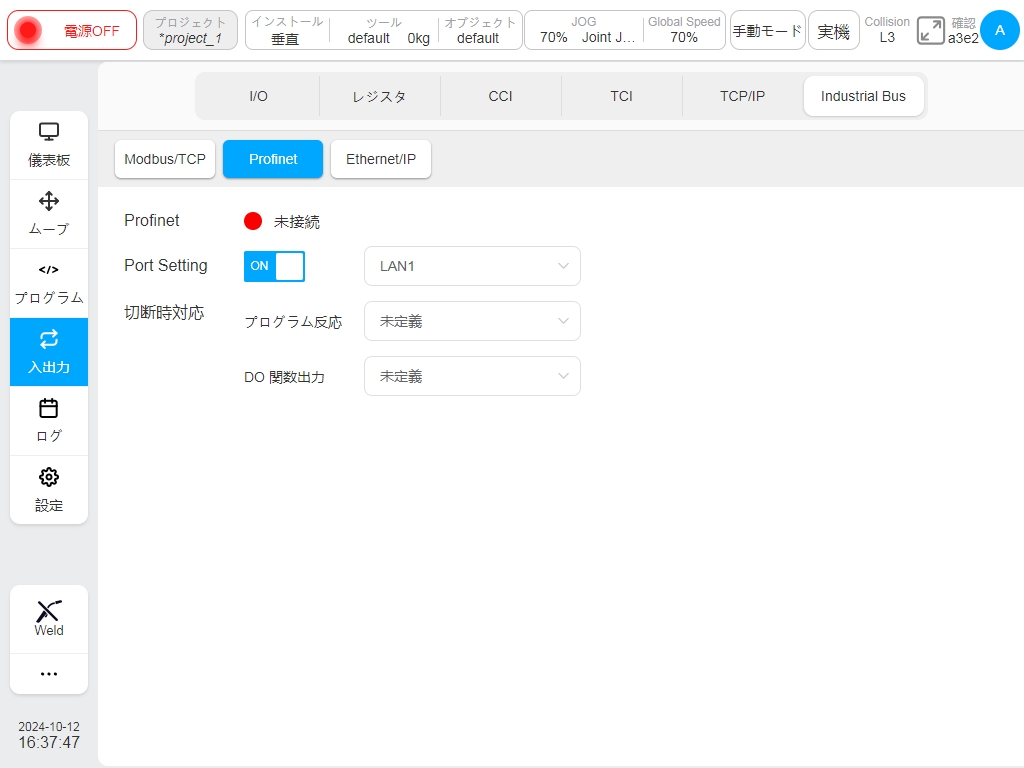
ProfinetとEthernet/IPサブタブは、主に接続ステータス、ポート設定、切断処理設定を表示するために使用されます、 プログラム応答アクションと機能出力IOの対応する構成を含む。 ポート設定には、対応するポート名を有効にして設定するかどうかが含まれます。プログラム応答セレクタのオプションは、未定義、一時停止プログラム、停止プログラムです; 機能 DO 出力セレクタのドロップダウン・オプションには、I/O サブページの機能出力信号の未定義と未定義の出力信号名があります。 各サブラベルページでProfinetとEthernet/IPディスコネクト用に設定されたDOファンクションは、I/Oサブページのファンクション出力設定と同期します。
さらに、Ethernet/IPサブタブはレシピ設定とレシピ管理にも使用できます。
注:Ethernet/IPではリアルタイムレシピしか選択できない!