시스템 개요#
프로젝트 관리#
이 시스템은 다중 프로젝트 관리를 지원하며 프로젝트 데이터에는 로봇 프로그램, 프로젝트 전역 변수, 프로젝트 설정 및 기타 정보가 포함됩니다. 시스템이 로드를 시작하면 시스템 설정에 따라 현재 프로젝트 데이터가 로드됩니다. 다른 프로젝트 데이터는 현재 프로젝트에서 사용할 수 없습니다.
조심
인터페이스 페이지의 설정, 설정 페이지의 설정 등 모든 프로젝트 데이터는 프로젝트 설정 후 저장해야 다음에 부팅할 때 올바르게 로드됩니다.
사용자 관리#
이 시스템은 다중 사용자 관리를 지원합니다. 사용자 권한은 운영자, 프로그래머, 관리자, 관리자로 정의됩니다. 구체적인 권한은 다음과 같이 설명되어 있습니다:
운영자
프로젝트 선택, 실행 프로그램, 수동 조그 프로그램, 로봇 상태 보기 등을 허용합니다.
프로그래머
운영자 사용자 권한
로봇 프로그램 프로그래밍, 프로젝트 구성
기본 사용자 이름은 default이고 초기 비밀번호는 123입니다.
유지 관리자
운영자 사용자 권한
시스템 업데이트
관리자
유지 관리자 사용자 권한
사용자 관리
사용자 이름은 admin이고 초기 비밀번호는 123입니다.
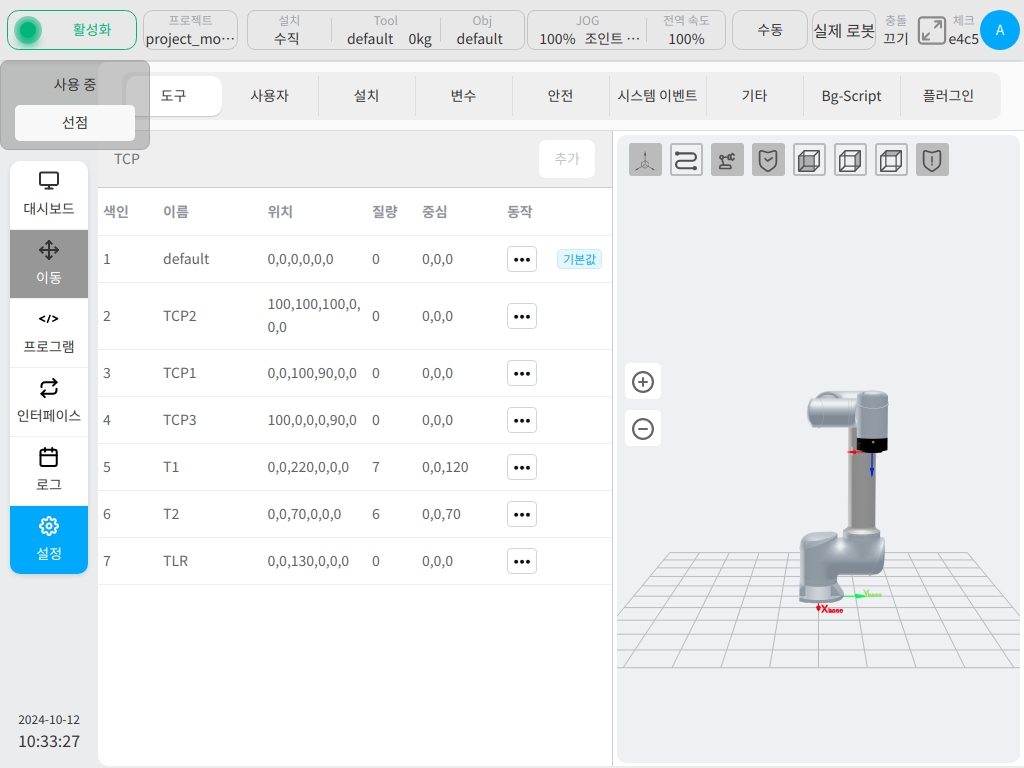
사용자 페이지 개요#
그림과 같이 전체 인터페이스는 크게 헤드 상태 표시줄, 왼쪽 내비게이션 바, 오른쪽 콘텐츠 영역의 세 부분으로 나뉩니다. 콘텐츠 영역은 왼쪽 탐색 모음의 선택에 따라 다른 콘텐츠(하위 페이지)를 표시합니다. 탐색 모음 아래에는 플러그인 항목과 시스템 날짜 및 시간이 표시됩니다.
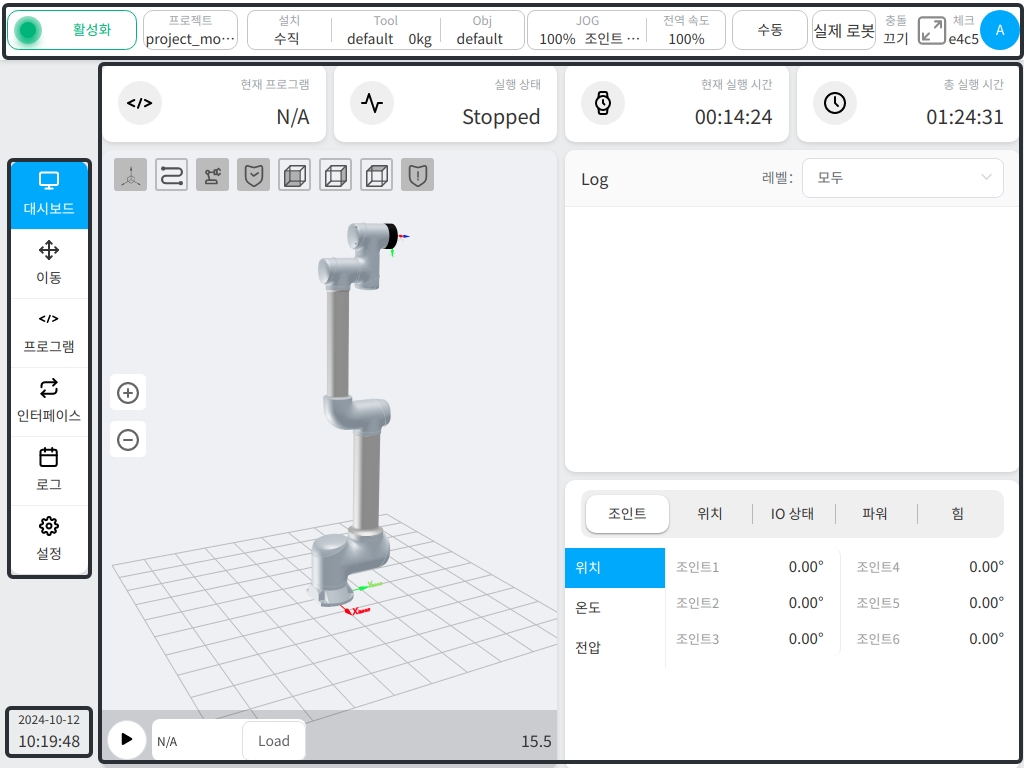
상태 표시줄에 표시되는 주요 정보는 로봇 조인트 상태 표시등, 상태 표시, 현재 프로젝트, 로봇 설치 방향, 현재 공구 좌표계 및 공작물 좌표계 정보, 속도 비율, 작동 모드, 충돌 감지 설정 정보, 안전 확인 코드, 사용자 정보 등입니다.
탐색 모음에는 대시보드, 이동, 프로그램, 인터페이스, 로그 및 설정의 여섯 가지 아이콘이 있습니다. 탐색 표시줄의 아이콘을 클릭하면 콘텐츠 영역에 표시되는 콘텐츠가 전환됩니다. 각 페이지의 주요 내용은 다음과 같습니다:
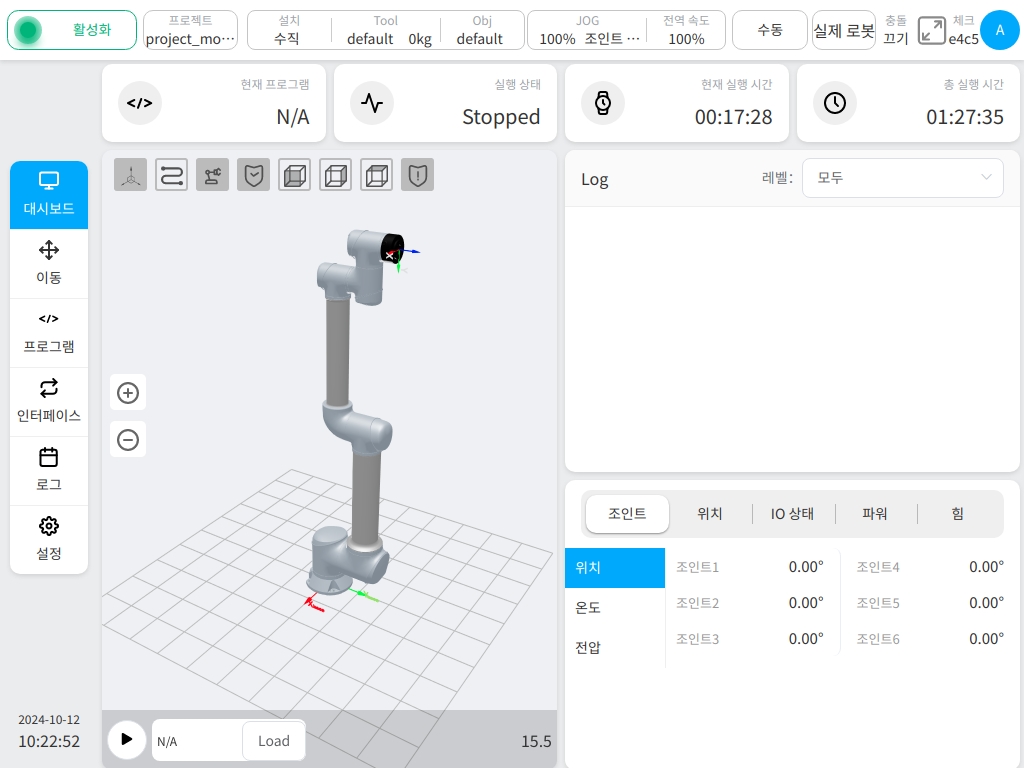
개요 페이지는 실행할 프로그램을 선택할 수 있는 프로덕션 보기 페이지로 프로그램 상태, 시스템 실행 시간, 시스템 로그 및 조인트 위치와 같은 기본 정보를 표시합니다.
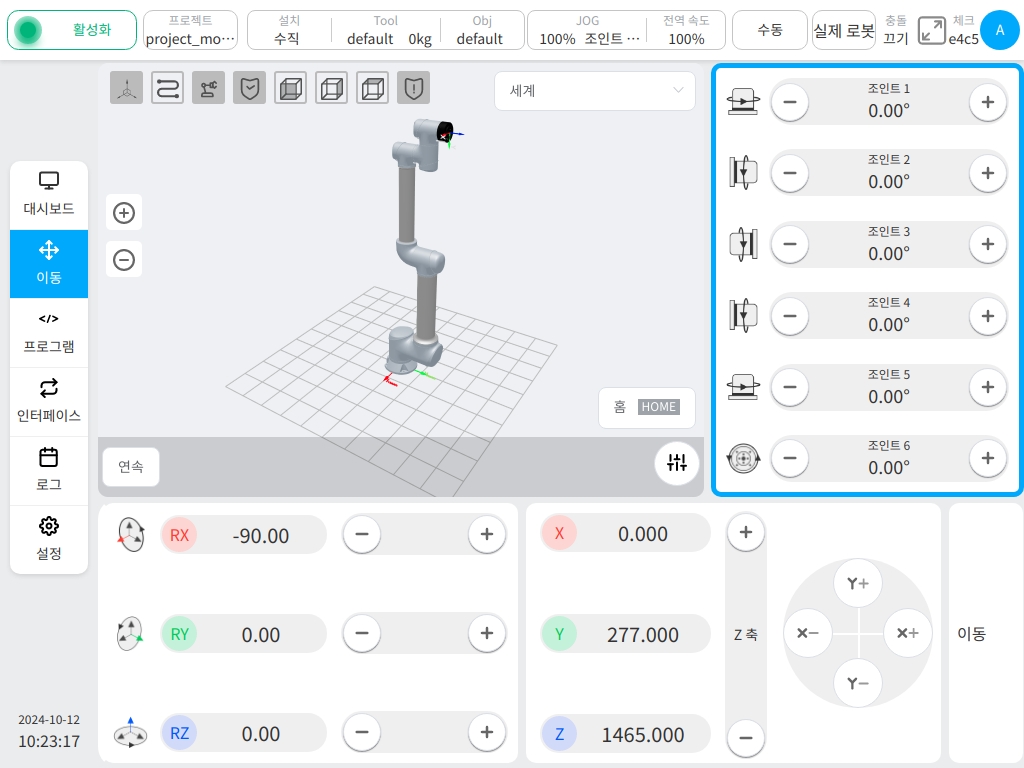
이동 인터페이스를 통해 사용자는 로봇을 수동으로 조작하고 좌표계와 수동 이동의 이동 모드를 설정할 수 있습니다.
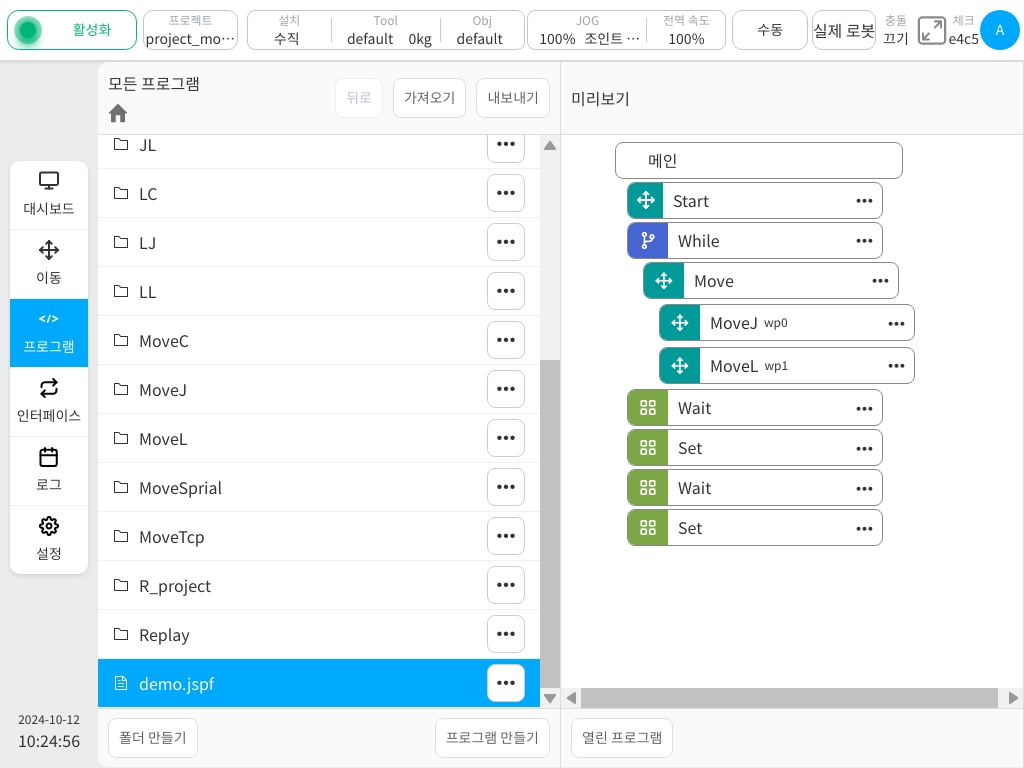
프로그램 인터페이스는 로봇의 메인 프로그래밍 페이지로, 사용자는 프로젝트의 프로그램 파일을 관리하고 제공된 그래픽 프로그래밍 환경을 통해 로봇 작업을 작성할 수 있습니다.
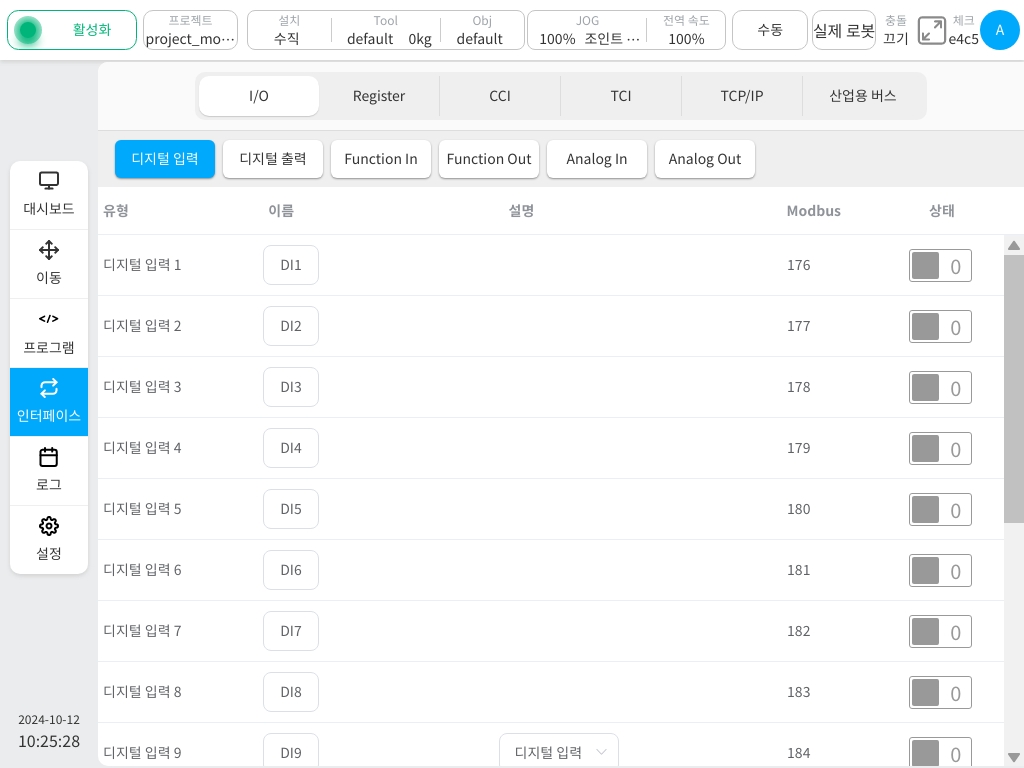
인터페이스 페이지에서는 디지털 입력 및 출력, 아날로그 입력 및 출력, TCP/IP 인터페이스 및 기타 산업용 필드버스 인터페이스를 포함한 로봇의 모든 외부 인터페이스를 구성할 수 있습니다.
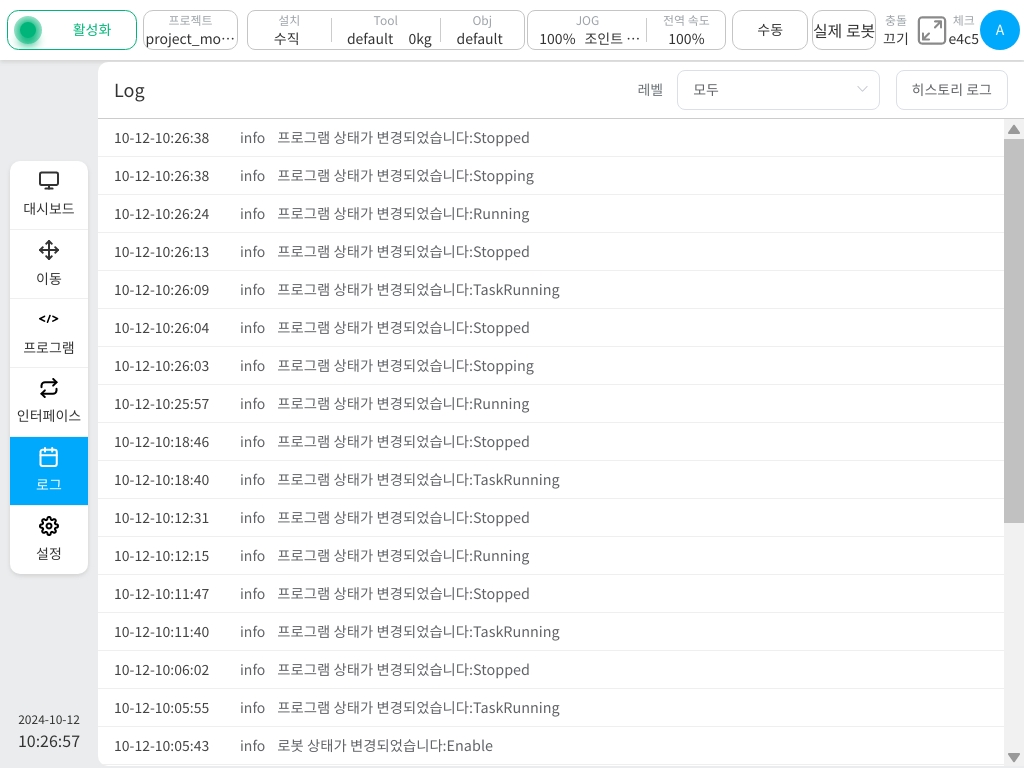
로그 페이지에는 이 시작의 시스템 로그 정보가 표시됩니다.
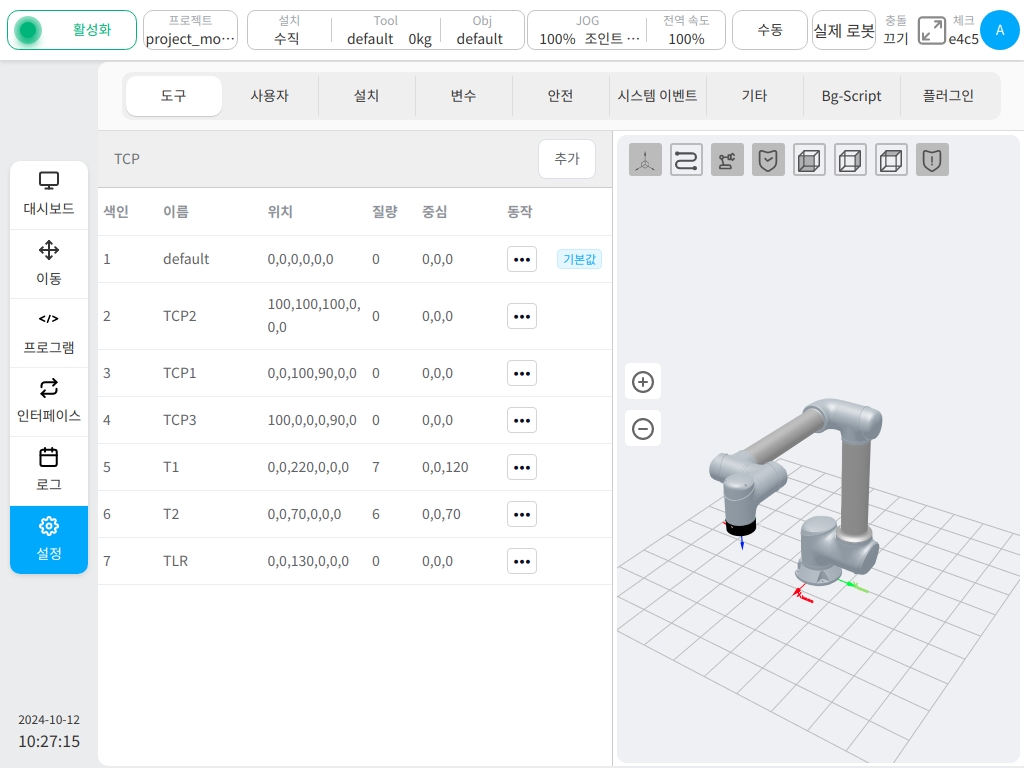
설정 페이지에는 좌표계 설정, 설치 방향 설정, 안전 설정 등 현재 프로젝트 구성 설정이 포함되어 있습니다.
다중 터미널 연결#
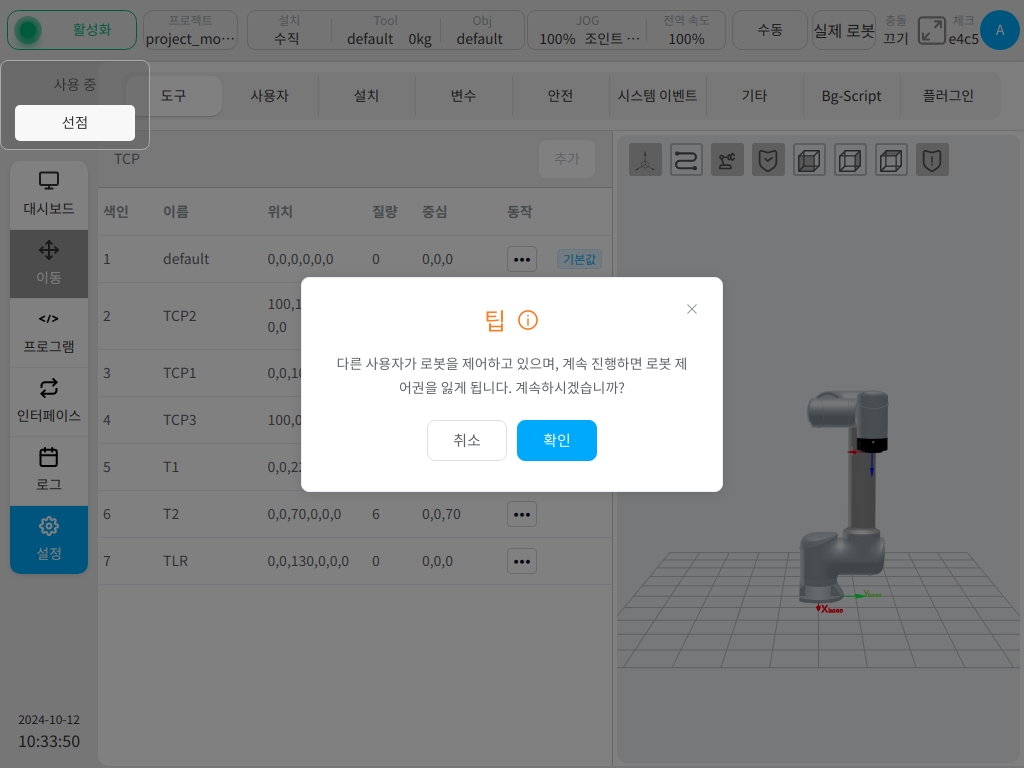
이 시스템은 여러 단말기를 동시에 연결할 수 있도록 지원하지만 제어 권한은 하나의 단말기만 가지고 있으며 프로그램 작동 및 시스템 구성과 같은 모든 기능을 수행할 수 있습니다. 다른 터미널은 로봇을 실행하거나 설정을 수정할 수 없는 보기 권한만 있습니다. 제어 권한이 없는 단말은 다음과 같습니다:
다른 단말기에서 제어권을 가져오려면 왼쪽 상단의 ‘제어권 가져오기’ 버튼을 클릭해 허가를 요청하세요. 다음 대화 상자가 나타나면 ‘확인’ 버튼을 클릭하여 시스템 제어권을 획득하면 이전 터미널의 제어권이 손실됩니다.
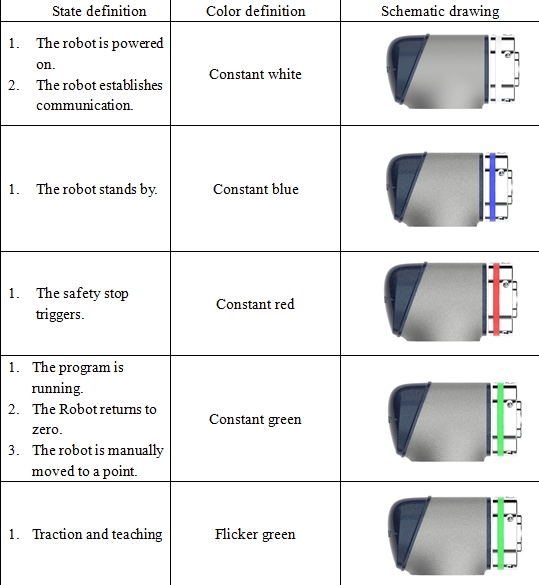
표시등이 있는 종료 표시등#