


상태 표시줄#
인터페이스 헤더의 상태 표시줄은 그림과 같습니다.

공동 상태 표시기:
로봇의 전원이 켜지지 않은 초기 상태의 표시등은 빨간색, 로봇의 전원이 켜진 비활성화 상태의 표시등은 주황색, 로봇이 활성화된 상태의 표시등은 녹색입니다. 이 표시등의 색상은 시작 인터페이스의 조인트 상태 표시등의 색상과 일치합니다.
상태 표시 영역:
이 영역에는 안전 상태, 프로그램 상태, 로봇 상태 등 세 가지 유형의 정보가 표시됩니다.
안전 상태가 표시됩니다: 감속 모드, 복구 모드, 안전 파라미터 구성, 안전 보드 펌웨어 업그레이드, Stop0, Stop1, Stop2, 안전 보드 오류 및 로봇 펌웨어 업그레이드.
프로그램 상태 표시 템플릿은 프로그램 중지, 프로그램 실행, 프로그램 일시 중단, 프로그램 일시 중단, 작업 실행입니다;
로봇 상태 표시 템플릿은 전원이 켜지지 않음, 활성화되지 않음, 대기 중, 펌웨어 업데이트입니다.
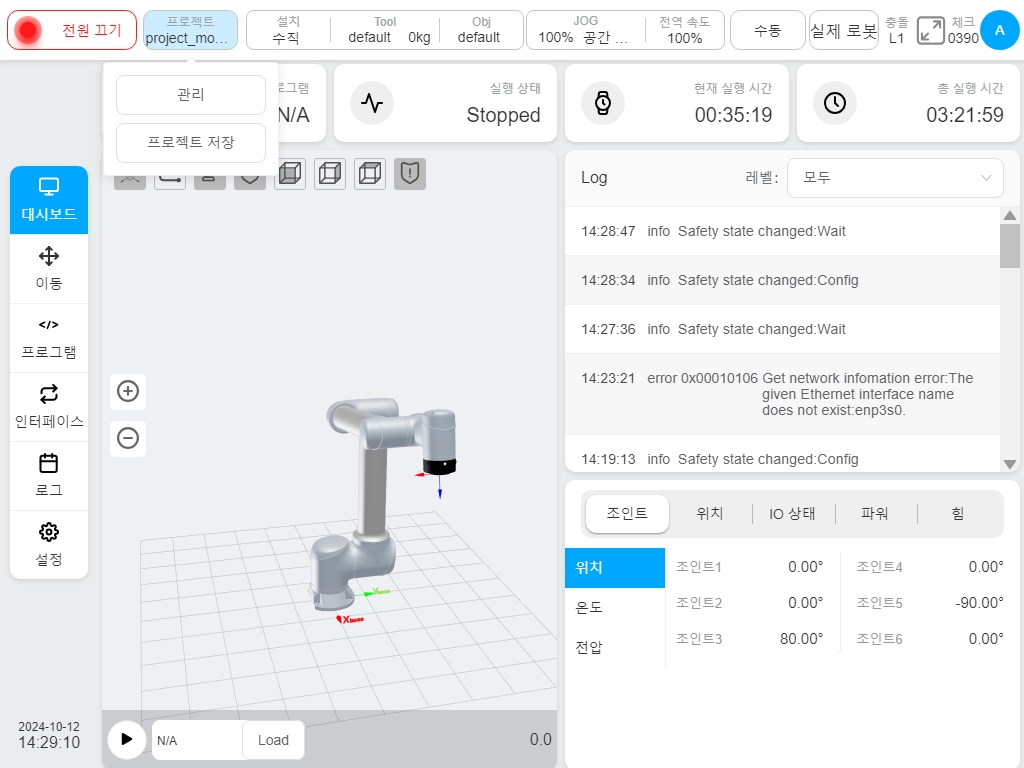
프로젝트:
현재 프로젝트 이름이 표시됩니다. ‘프로젝트’ 버튼을 클릭하면 그림과 같이 ‘프로젝트 관리’ 및 ‘프로젝트 저장’ 버튼이 포함된 팝업 상자가 표시됩니다. 프로젝트 관리 섹션에서 사용자는 프로젝트를 생성, 가져오기, 내보내기, 복원, 로컬 컴퓨터에 저장, 클라우드에 프로젝트 백업, 프로젝트 삭제 및 프로젝트 이름 수정을 할 수 있습니다.
설치:
로봇의 현재 설치 방향과 설치 위치 설명을 표시합니다. ‘설치’ 표시 상자를 클릭하면 그림과 같이 로봇 설치 방향과 설치 자세가 표시됩니다.
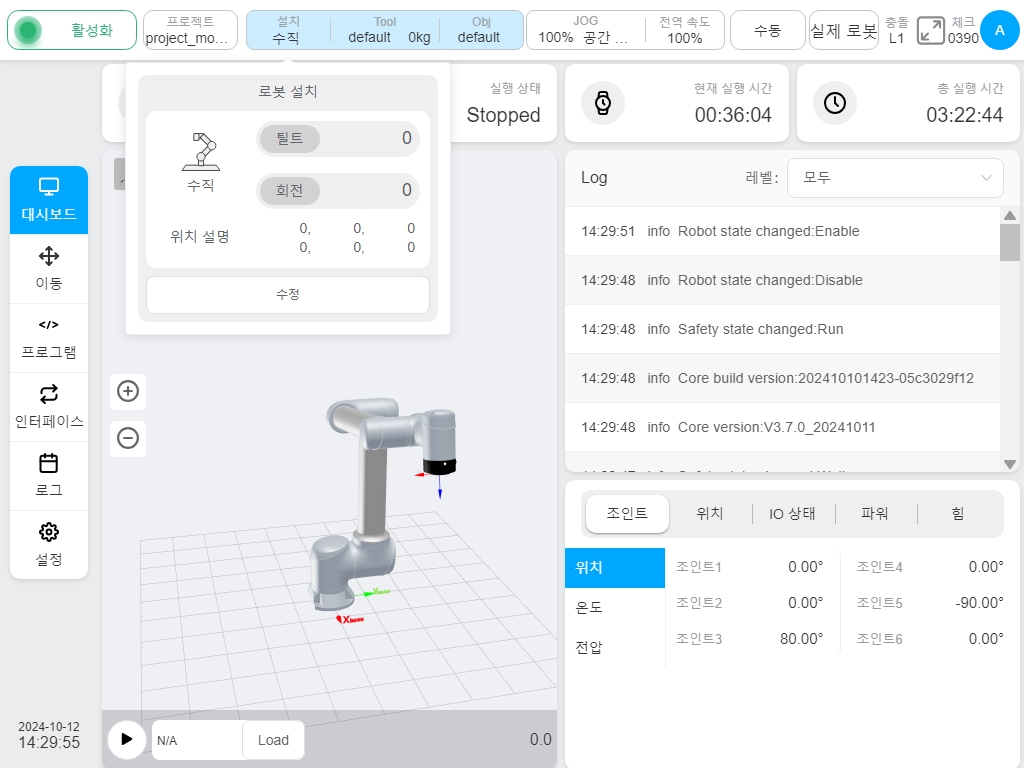
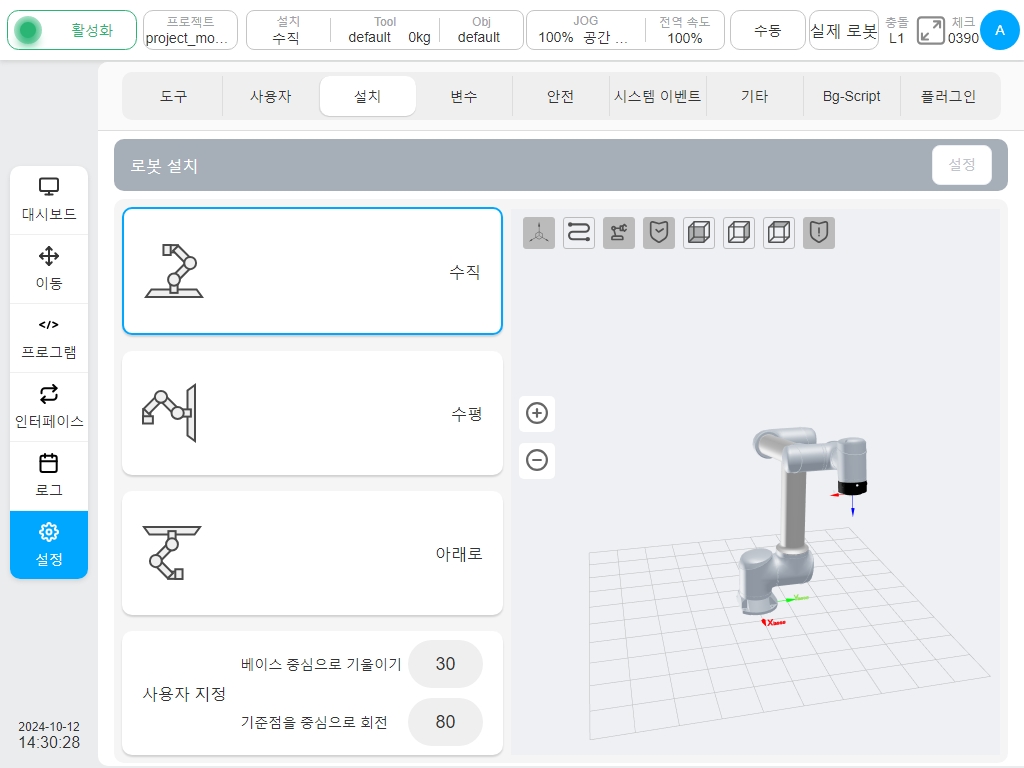
그림과 같이 설정 인터페이스의 설치 설정 하위 페이지로 이동하려면 ‘수정’ 버튼을 클릭합니다. 사용자는 이 페이지에서 로봇 설치 인터페이스를 설정할 수 있습니다.
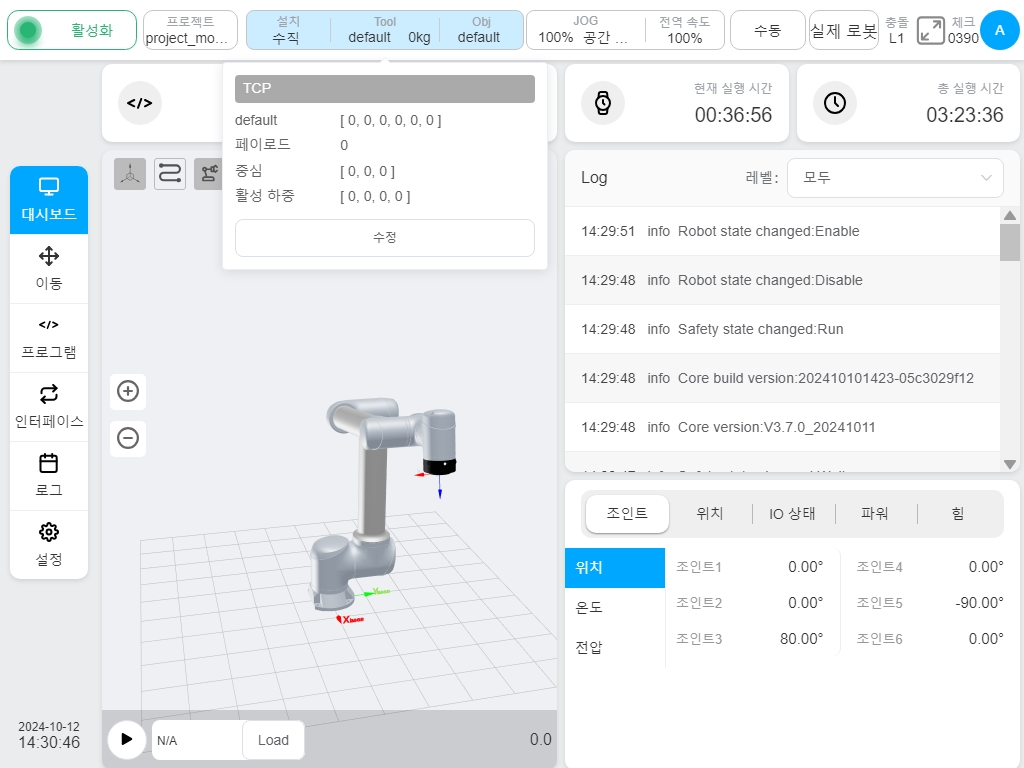
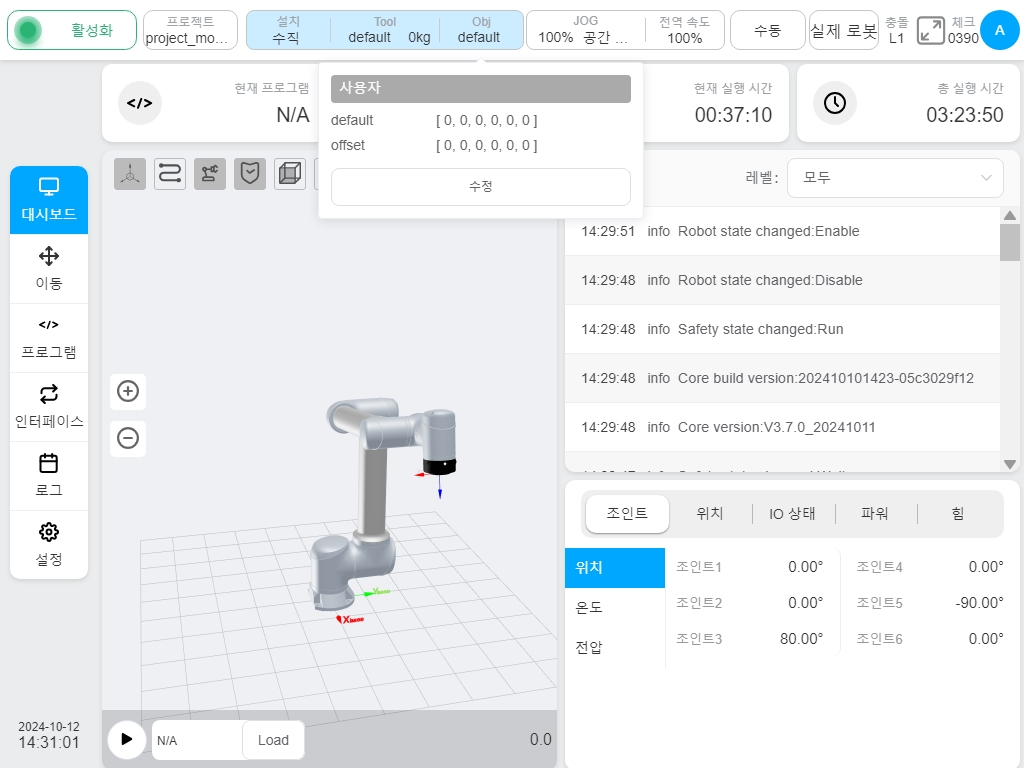
도구:
로봇의 현재 도구 좌표계 이름과 하중 질량을 표시합니다. ‘도구’ 표시 상자를 클릭하면 그림과 같이 로봇 도구 좌표계의 관련 정보를 보여주는 팝업 상자가 표시됩니다. ‘수정’ 버튼을 클릭하면 위와 유사한 설정 인터페이스의 도구 설정 하위 페이지로 이동하여 설치 설정 인터페이스로 이동합니다.
작품:
로봇의 현재 공작물 좌표계의 이름을 표시합니다. 그림과 같이 ‘공작물’ 표시 상자를 클릭하면 로봇 공작물 좌표계 정보가 표시됩니다. ‘수정’ 버튼을 클릭하면 위와 유사하게 설정 인터페이스의 공작물 설정 하위 페이지로 이동하여 설치 설정 인터페이스로 이동합니다.
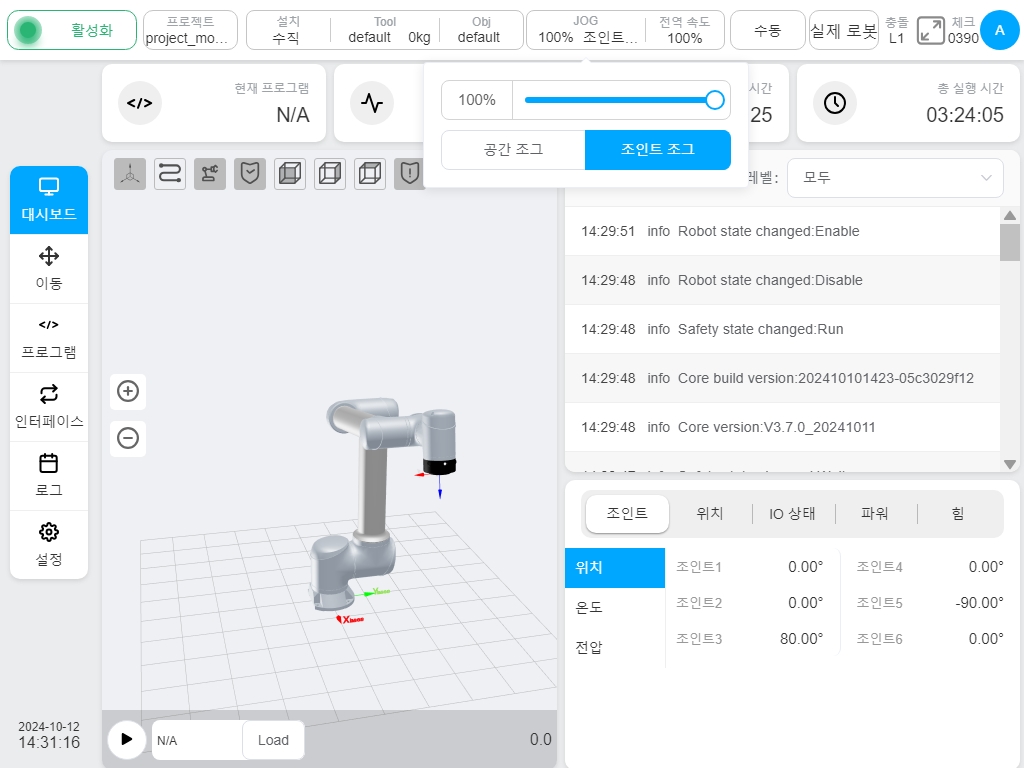
조그 속도/유형:
로봇의 현재 JOG 속도의 백분율을 표시합니다. JOG 표시 상자를 클릭하면 JOG 속도 조정 슬라이더와 JOG 유형 선택 버튼이 표시되어 JOG 속도 또는 수동 입력을 조정하고 공간 JOG 또는 조인트 JOG 간에 전환할 수 있습니다. 참고: 이 시작 시 로봇의 JOG 속도에만 영향을 미치며 다음 시작은 실패합니다. 시작할 때마다 JOG 속도를 변경해야 하는 경우 ‘설정’ - ‘기타 설정’ - ‘시작 설정’에서 기본 JOG 속도를 설정하십시오.
글로벌 속도:
로봇의 현재 글로벌 속도의 백분율을 표시합니다. 속도 표시 상자를 클릭하면 속도 조정 슬라이더가 표시됩니다. 전역 속도를 조정하거나 수동으로 입력할 수 있습니다. 참고: 이 시작 시 로봇의 전역 속도만 영향을 받으며 다음 시작 시에는 실패합니다. 시작할 때마다 글로벌 속도를 변경해야 하는 경우 ‘설정’ - ‘기타 설정’ - ‘시작 설정’에서 기본 글로벌 속도를 설정하세요.
운영 모드:
로봇 작동 모드, 수동 모드, 자동 모드를 표시합니다. 디스플레이 상자를 클릭하면 ‘수동 모드’ 및 ‘자동 모드’ 버튼이 포함된 팝업 상자가 표시됩니다. 해당 버튼을 클릭하여 작동 모드를 전환합니다. 수동 모드와 자동 모드 사이를 전환할 때 사용자는 현재 로그인 비밀번호를 입력해야 합니다. 올바른 비밀번호를 입력하면 모드 전환이 가능합니다. 물리적 하드웨어 모드 전환 신호가 활성화되면 인터페이스의 모드 전환 버튼이 유효하지 않습니다.
트루 머신:
실제 모드와 시뮬레이션 모드 사이를 전환합니다. 시뮬레이션 모드는 로봇이 활성화된 대기 상태이고 프로그램이 중지된 경우에만 설정할 수 있습니다.
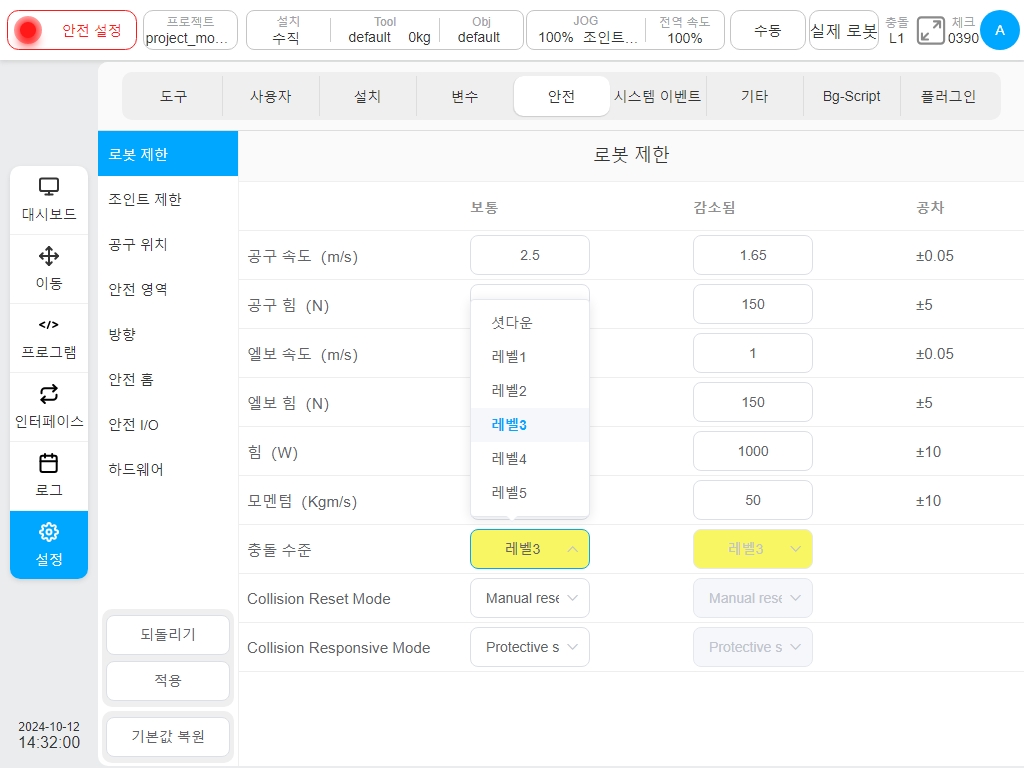
충돌 감지:
충돌 감지에는 충돌 감지 설정의 현재 상태와 안전 수준이 표시됩니다. 안전 수준 설정에 대한 자세한 내용은 6.3.2항을 참조하세요.
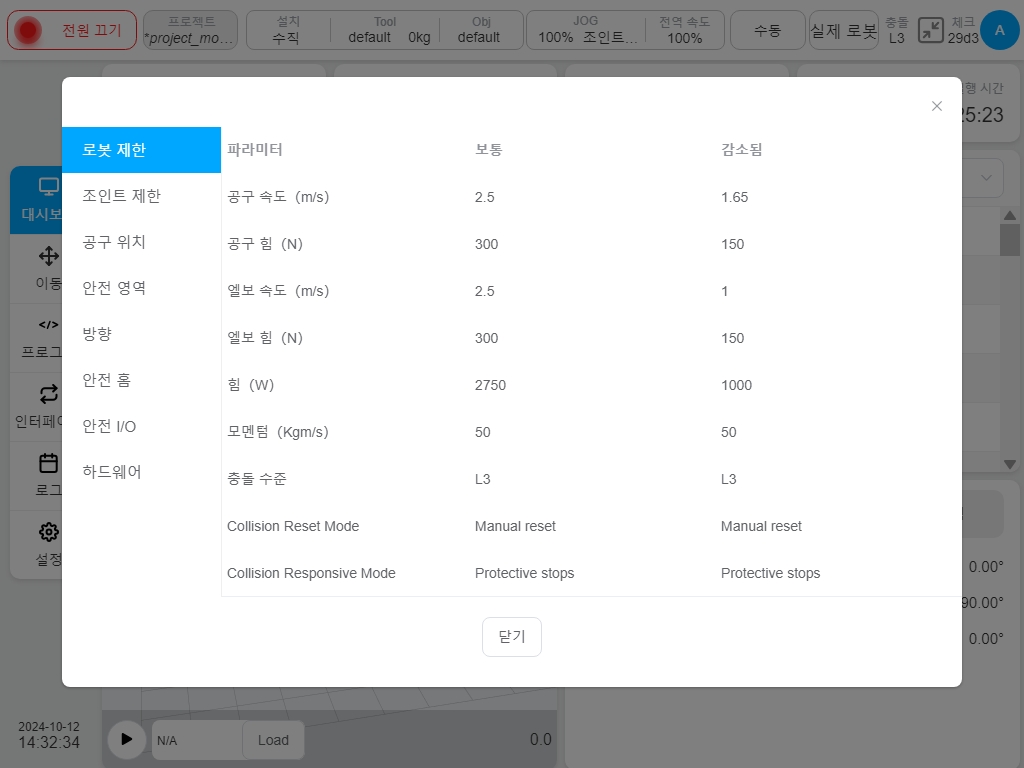
안전 확인 코드:
안전 인증 코드가 표시됩니다. 그림과 같이 안전 확인 페이지가 표시된 안전 확인 영역을 클릭하면 안전 확인 페이지가 표시됩니다. 이 인터페이스에는 설정 인터페이스의 안전 설정 하위 페이지에서 설정한 안전 구성 매개변수가 표시됩니다. 페이지를 닫으려면 안전 확인 페이지 하단의 닫기 또는 페이지 오른쪽 상단에 있는 십자 표시를 클릭합니다.
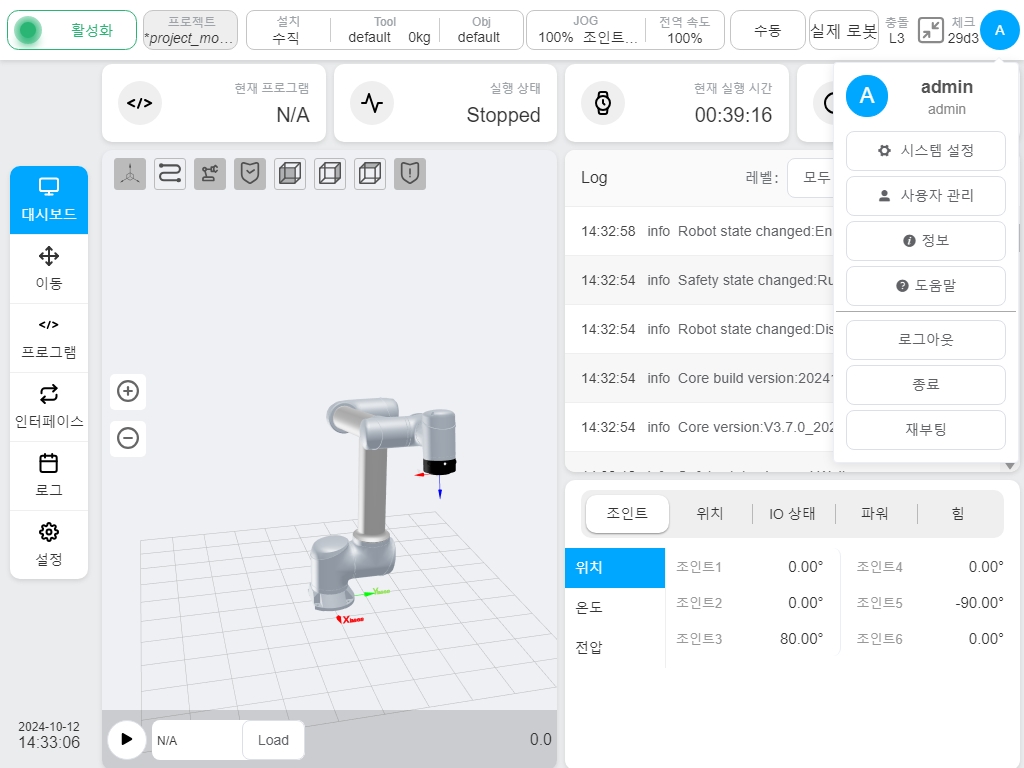
사용자 프로필 사진:
로그인 사용자 이름의 대문자를 표시합니다. 사용자 프로필 사진을 클릭하면 그림과 같은 팝업 상자가 표시됩니다. 이러한 버튼에는 비밀번호 변경(관리자 이외의 사용자에게 표시됨), 시스템 설정, 계정 관리(관리자 권한이 있는 사용자에게만 표시됨), 정보, 도움말, 로그아웃, 종료 및 다시 시작이 포함됩니다.
‘도움말’ 버튼을 클릭하면 오류 코드를 조회할 수 있는 ‘도움말 문서’ 창이 나타납니다.