안전 유지 관리#
수동 릴리스 브레이크#
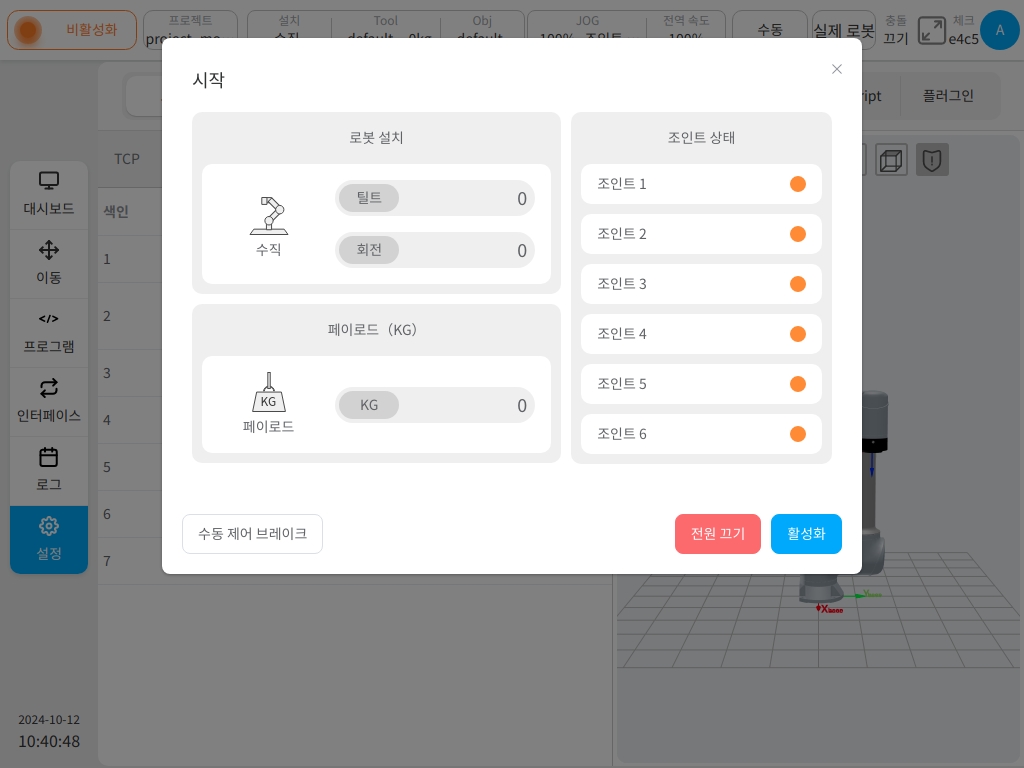
경우에 따라 사용자가 단일 조인트에서 수동으로 브레이크를 해제해야 할 수도 있습니다. 로봇의 전원이 켜져 있지만 활성화되지 않은 경우 그림과 같이 시작 페이지에 수동으로 브레이크를 해제할 수 있는 입구가 나타납니다.
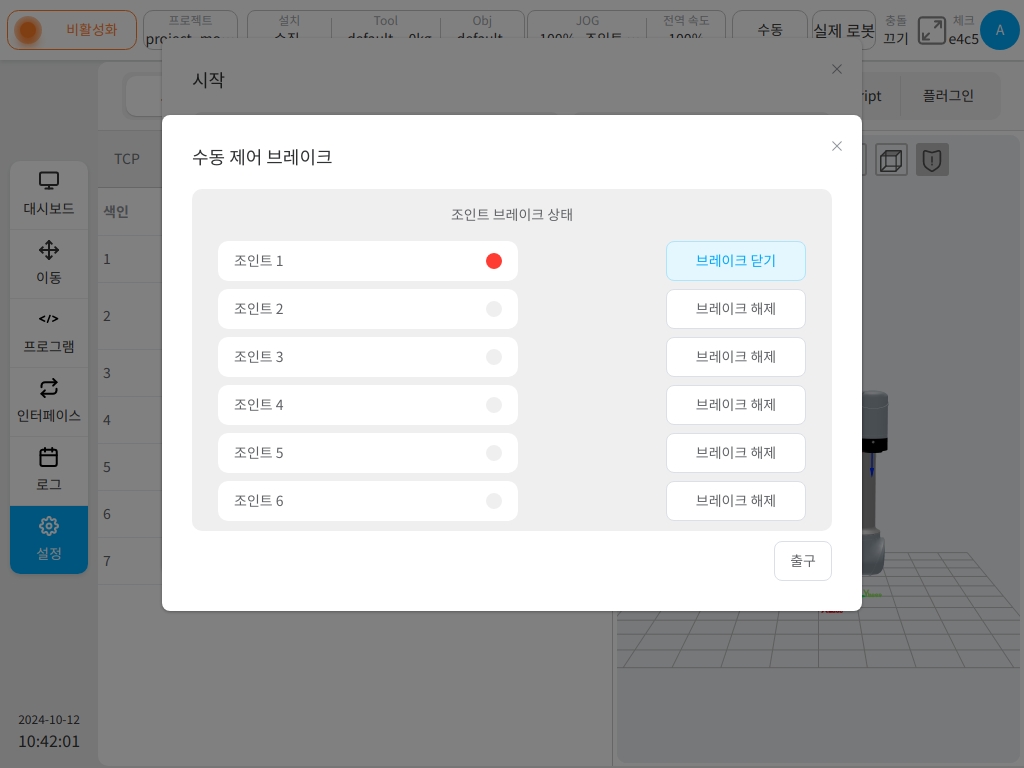
클릭하면 그림과 같이 수동 해제 브레이크 페이지로 들어갑니다. 페이지 왼쪽에는 각 조인트의 브레이크 상태가 표시되며, 회색은 브레이크가 닫혀 있음을, 빨간색은 브레이크가 해제되었음을 나타냅니다. 오른쪽에는 ‘브레이크 제어’ 버튼이 있으며, 클릭하면 브레이크의 개폐를 제어할 수 있습니다.
브레이크 테스트#
사용자는 로봇의 브레이크 고장으로 인한 위험을 방지하기 위해 일정에 따라 브레이크 테스트를 수행해야 합니다. 시스템은 사용자에게 브레이크 테스트를 수행하도록 주기적으로 알림을 보내며 기본 알림 주기는 30일마다입니다.
마지막 브레이크 테스트 이후 설정된 시간이 경과하면 다음 대화 상자가 나타나 사용자에게 브레이크 테스트를 수행하라는 메시지가 표시됩니다. 시작 페이지의 브레이크 테스트 입구는 사용자에게 알리기 위해 작은 빨간색 점으로 표시됩니다.
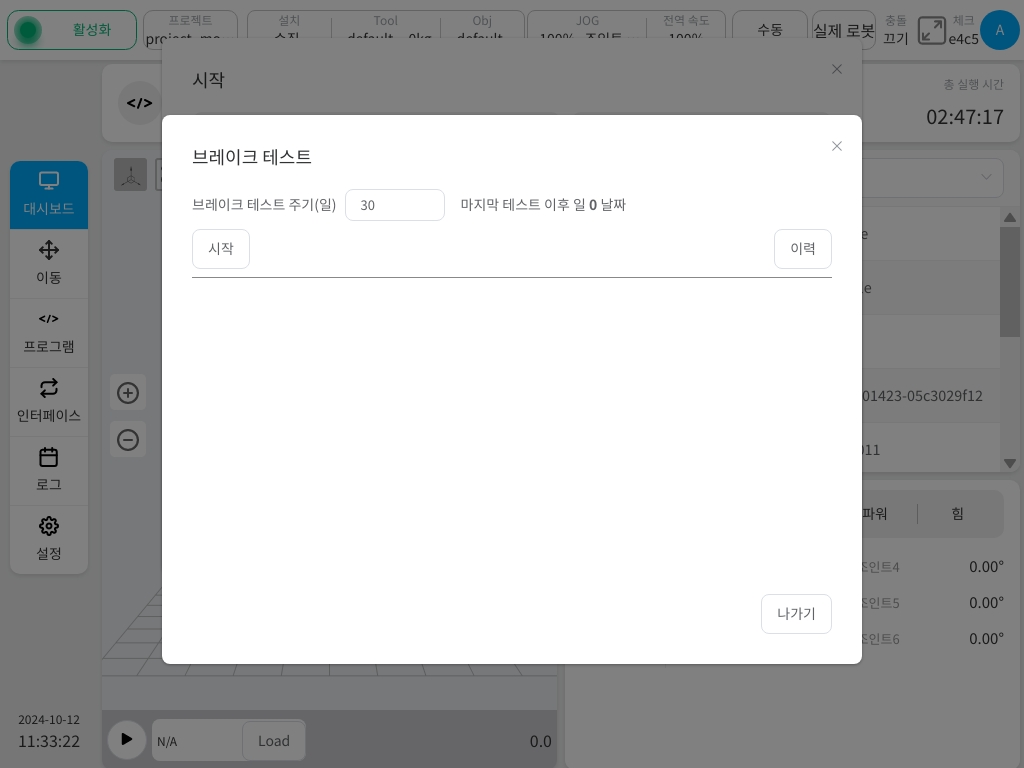
로봇이 활성화되면 시작 페이지에 브레이크 테스트 기능으로 들어가는 입구가 나타납니다. 버튼을 클릭하면 그림과 같은 브레이크 테스트 페이지로 들어갑니다. 이 페이지에는 브레이크 테스트 기간과 마지막 브레이크 테스트 이후 일수가 표시됩니다.
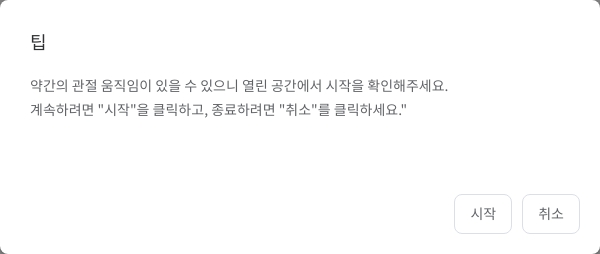
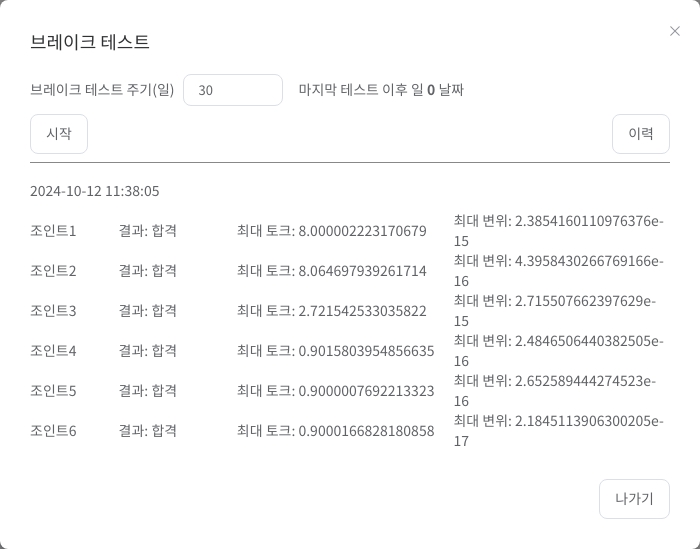
‘탐지 시작’ 버튼을 클릭하면 다음 대화 상자가 나타나고 지시에 따라 작업을 수행합니다. 감지 과정에서 언제든지 감지 프로세스를 일시 중지하고 중지할 수 있습니다. 테스트가 완료되면 브레이크 테스트 결과가 표시됩니다.
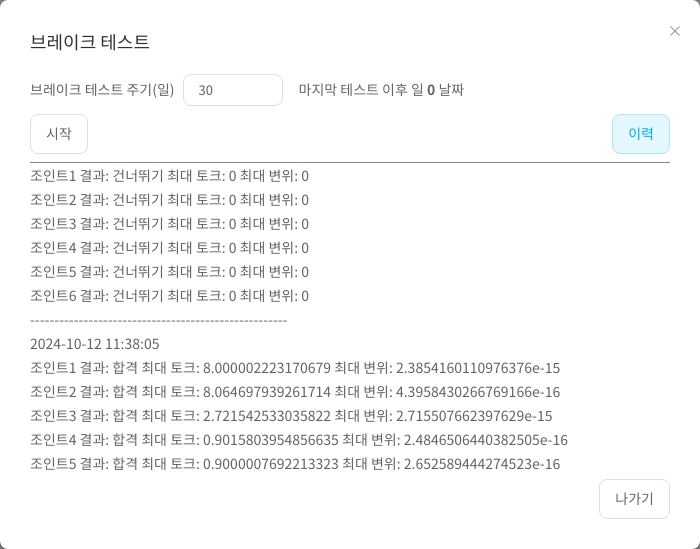
‘기록 데이터’ 버튼을 클릭하면 이전 브레이크 테스트의 시간 및 테스트 결과를 볼 수 있습니다.
전원 켜기 조인트 위치 확인#
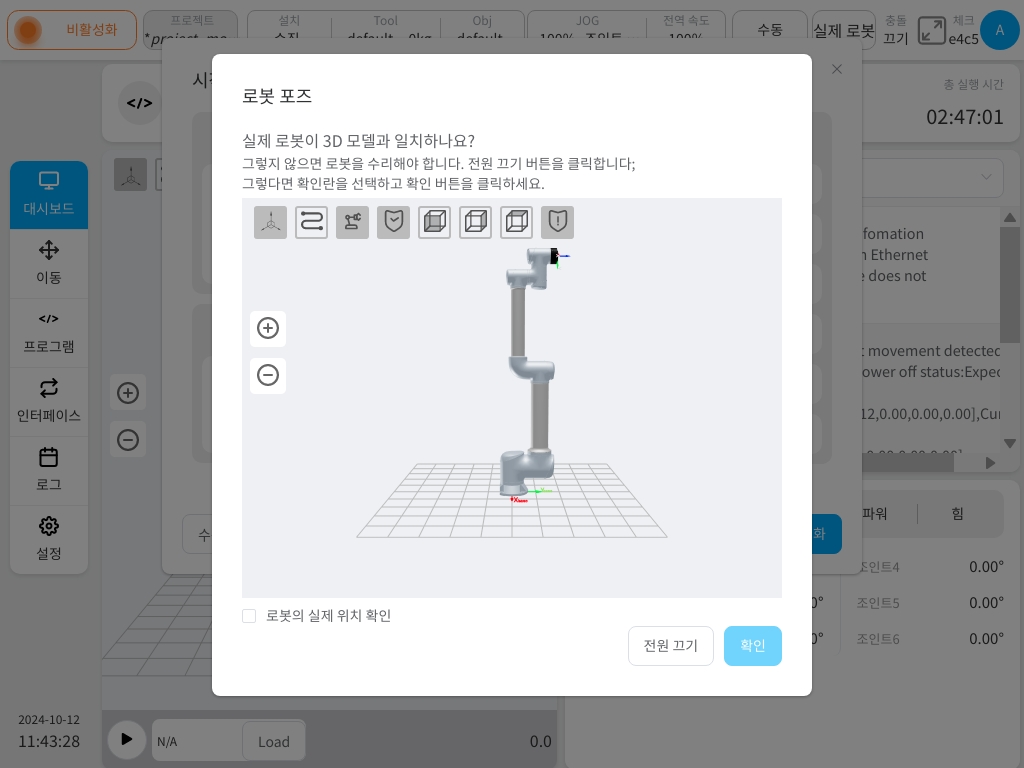
로봇의 전원이 켜지면 전원이 꺼진 상태에서 관절이 크게 회전했는지 감지하여 안전한 사용을 보장합니다.
조인트가 크게 회전된 경우 다음 대화 상자가 나타납니다. 사용자는 인터페이스에서 실제 로봇의 자세가 3D 모델과 일치하는지 확인합니다. 일치하는 경우 ‘위에 표시된 로봇의 자세가 실제 로봇과 일치하는지 확인’을 클릭한 후 ‘확인’ 버튼을 클릭하여 전원을 계속 켭니다. 그렇지 않은 경우 ‘전원 끄기’ 버튼을 클릭하여 로봇의 전원을 차단하고 유지보수 담당자에게 연락합니다.