


페이지 이동#
그림과 같이 탐색 표시줄에서 ‘이동’ 버튼을 클릭하면 이동 페이지로 들어갑니다.
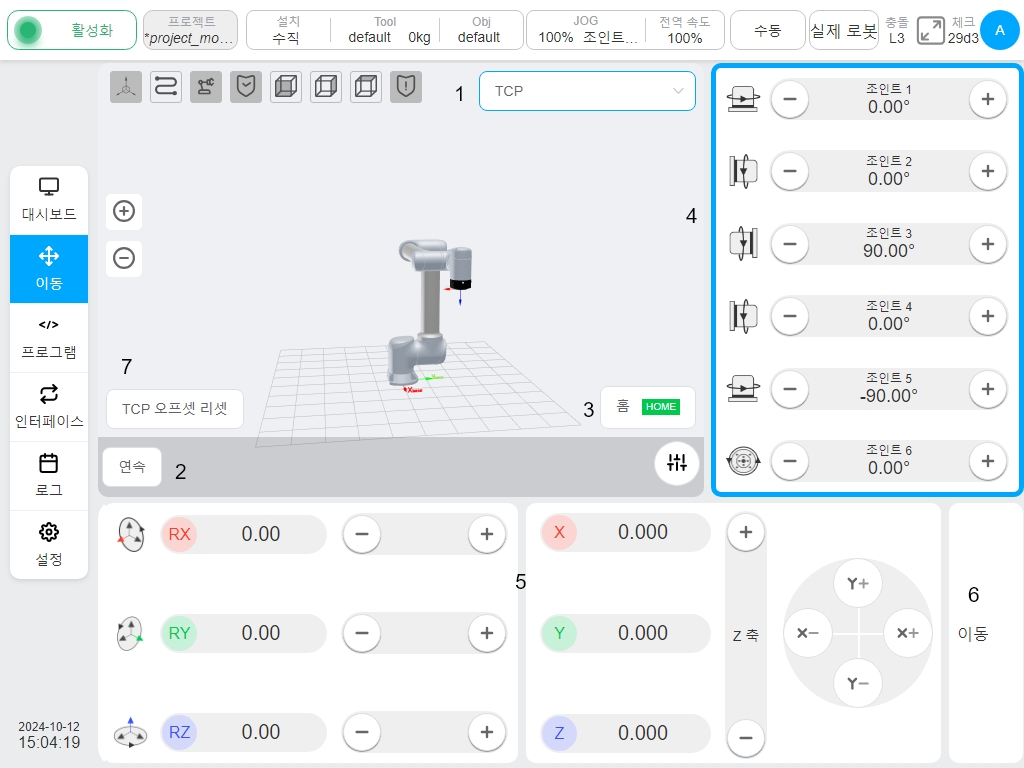
페이지 왼쪽 상단에 3D 시뮬레이션 모델이 표시되고, ① 선택기를 클릭하면 현재 로봇이 사용하는 좌표계와 로봇의 수동 조작을 위한 기준 좌표계를 선택할 수 있으며, 기본적으로 세계 좌표계(이 시스템의 기준 좌표계와 동일)가 사용되므로 로봇의 바닥을 좌표 기준점으로 사용합니다. 또한 공구 좌표계와 공작물 좌표계를 선택할 수 있습니다. 공구 좌표계는 엔드 툴의 끝점이 좌표 기준점이고 공작물 좌표계는 사용자가 자유롭게 설정할 수 있음을 나타냅니다. 기준 좌표계를 전환하면 인터페이스에 표시되는 데카르트 좌표의 로봇 위치 태도 데이터가 그에 따라 변경됩니다.
아이콘 ②는 사용자가 모드를 전환할 수 있는 버튼이며, 버튼에 표시된 모드는 현재 선택된 이동 모드입니다. ‘연속 모드’ 버튼을 클릭하면 ‘스텝 모드’로 전환되며, 인터페이스에 스텝 각도 및 스텝 거리 조정 버튼과 데이터 표시 상자가 표시됩니다. 사용자 정의 이동에 대한 스텝 각도 및 스텝 거리의 기본값은 0.5도 및 0.5mm이며, 최소 허용 설정은 0.1도 및 0.1mm, 최대 허용 설정은 5도 및 5mm로 스텝 각도 및 스텝 거리를 조정할 수 있습니다.
아이콘 ③은 ‘길게 누르면 재설정’ 버튼입니다. 이 버튼을 길게 누르면 로봇이 설정된 홈 포인트로 이동하고, 버튼을 놓으면 이동이 중지됩니다. 기본 홈 포인트는 각 관절의 0°이며 로봇은 똑바로 세워진 상태입니다. 로봇이 ‘홈’버튼으로 이동하면 그림과 같이 ‘길게 누르고 복귀’의 단어 배경이 녹색으로 바뀌며 로봇이 홈 위치에 도달했음을 나타냅니다.

영역 ④는 수동으로 조작하는 로봇 관절이 움직이는 영역입니다. 사용자가 이 영역의 아무 곳이나 클릭하면 해당 영역에 파란색 테두리가 표시되며, 이는 현재 로봇 관절이 수동으로 움직이고 있음을 나타냅니다. 관절의 왼쪽 화살표 또는 오른쪽 화살표 버튼을 길게 누르면 관절이 전진 또는 후진 방향으로 움직이고, 버튼에서 손을 떼면 관절이 움직이지 않습니다. 또한 티치 펜던트의 오른쪽에 있는 ‘+’ 및 ‘-’ 버튼을 위에서 아래로 길게 눌러 관절을 움직일 수도 있습니다(1번부터 6번까지 관절에 해당).
영역 ⑤는 데카르트 좌표계에서 수동 조작 로봇의 끝이 움직이는 영역입니다. 이 영역의 아무 곳이나 클릭하면 해당 영역에 파란색 테두리가 표시되며, 이는 수동으로 조작하는 로봇 끝의 현재 움직임을 나타냅니다. X, Y, Z 축 버튼을 길게 누르면 데카르트 좌표계에서 로봇의 위치가 변경되고 RX, RY, RZ 버튼을 길게 누르면 데카르트 좌표계에서 로봇의 자세가 변경되며 해당 버튼을 놓으면 로봇의 이동이 중지됩니다. 마찬가지로 사용자는 티치 펜던트의 오른쪽에 있는 ‘+’ 및 ‘-’ 버튼을 길게 눌러 로봇의 위치 태도를 변경할 수 있습니다. 이 버튼은 각각 위에서 아래로 X, Y, Z, RX, RY, RZ의 여섯 가지 이동 방향에 해당합니다.
조심
티치 펜던트의 물리 버튼 조그 로봇을 사용할 때는 현재 활성 상태(파란색 테두리)에 따라 조인트 공간 모션 또는 직교 공간 모션이 제어되는지 확인해야 합니다.
아이콘 ⑥은 사용자가 관절 각도나 포즈 값을 직접 입력할 수 있는 전환 버튼으로, 버튼을 누르고 있으면 로봇이 이동합니다. ‘이동하기’ 버튼을 클릭하면 ④번 영역과 ⑤번 영역에 각각 관절 각도와 포즈 값을 입력하는 입력 상자가 표시되고, 3D 모델 영역에 목표 지점 위치의 로봇 모델이 회색으로 표시됩니다. 3D 모델 영역에는 그림과 같이 목표 지점 위치의 로봇 모델이 회색으로 표시됩니다:

관절 각도 및 위치 값 입력 상자를 클릭하면 가상 숫자 키패드가 나타나고, 가상 숫자 키패드에 목표 위치 데이터를 입력한 후 ‘Esc’ 키를 클릭하여 가상 숫자 키보드를 닫습니다. 그런 다음 ‘이동’ 버튼을 길게 누르면 로봇이 목표 위치로 이동하고 버튼에서 손을 떼면 로봇이 움직임을 멈춥니다. ‘직선 이동’ 라디오 박스에 체크 표시가 되어 있으면 로봇이 직선으로 목표 위치로 이동하고, 그렇지 않으면 로봇이 관절로 목표 위치로 이동한다는 의미입니다. ‘포장된 자세’ 라디오 상자를 선택하면 ‘선형 이동’ 라디오 상자가 비활성화되고 조인트 각도 및 데카르트 위치 자세 입력 상자가 비활성화되며, 체크된 ‘선형 이동’ 라디오 상자에 대해 ‘선형 이동’ 라디오 상자가 비활성화됩니다. ‘선형 이동’ 라디오 박스는 체크가 해제되고 조인트 각도 및 위치 태도 값은 패킹 태도에 고정 값으로 표시되어 로봇이 조인트가 있는 패킹 위치로 이동함을 나타내며 ‘종료’ 버튼을 클릭하면 목표 위치를 수동으로 입력하는 인터페이스가 종료되고 원래의 이동 인터페이스로 돌아갑니다. 그림과 같습니다:

아이콘 ⑦은 이동 페이지의 기준 좌표계를 도구 좌표계로 선택한 경우에만 표시되는 ‘도구 오프셋 리셋’ 버튼입니다. 사용자가 이 버튼을 클릭하면 클릭 시점의 위치가 기준 시작점으로 사용되며, 버튼 클릭 시점의 기준 시작점과의 오프셋을 기준으로 로봇 이동 중 로봇 위치가 ⑤ 영역에 실시간으로 표시됩니다. TCP 오프셋 계산을 위한 기준 시작점은 사용자가 ‘도구 오프셋 재설정’ 버튼을 다시 클릭할 때까지 업데이트되지 않습니다.