Mantenimiento de la seguridad#
Freno de desbloqueo manual#
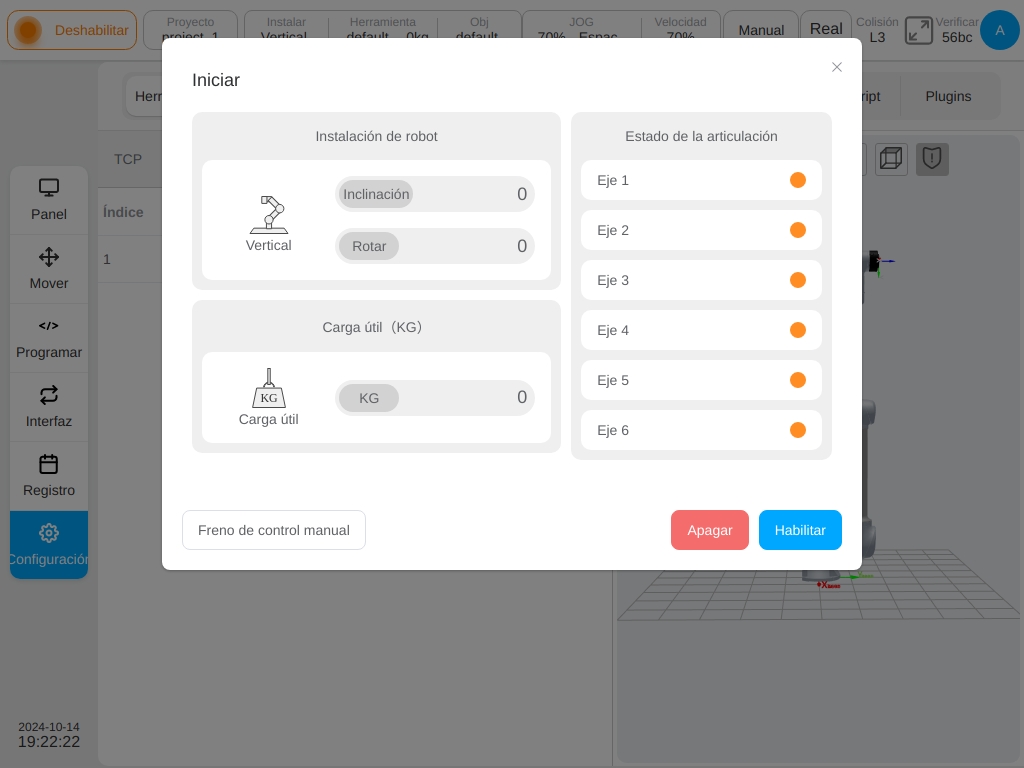
En algunos casos, el usuario necesitará liberar manualmente el freno de una sola articulación. Cuando el robot está encendido pero no habilitado, la entrada para liberar manualmente el freno aparecerá en la página de inicio que se muestra como en la figura.
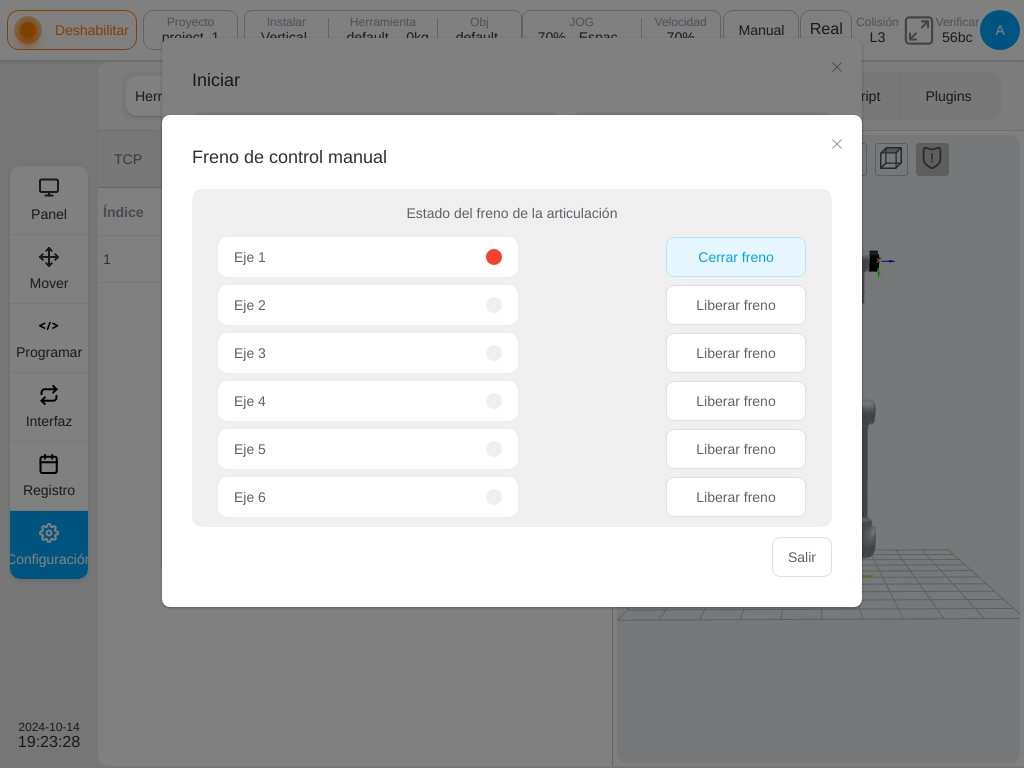
Haga clic para entrar en la página del freno de liberación manual como se muestra en la figura. El lado izquierdo de la página muestra el estado del freno de cada articulación donde el color gris presenta el freno cerrado, el color rojo presenta el freno liberado. En el lado derecho se encuentra el botón “Control de Freno”, haga clic para controlar la apertura y cierre del freno.
Prueba de frenos#
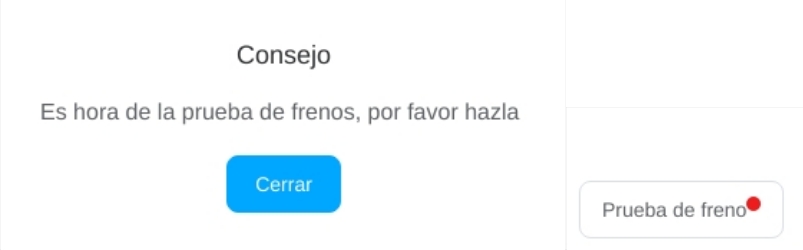
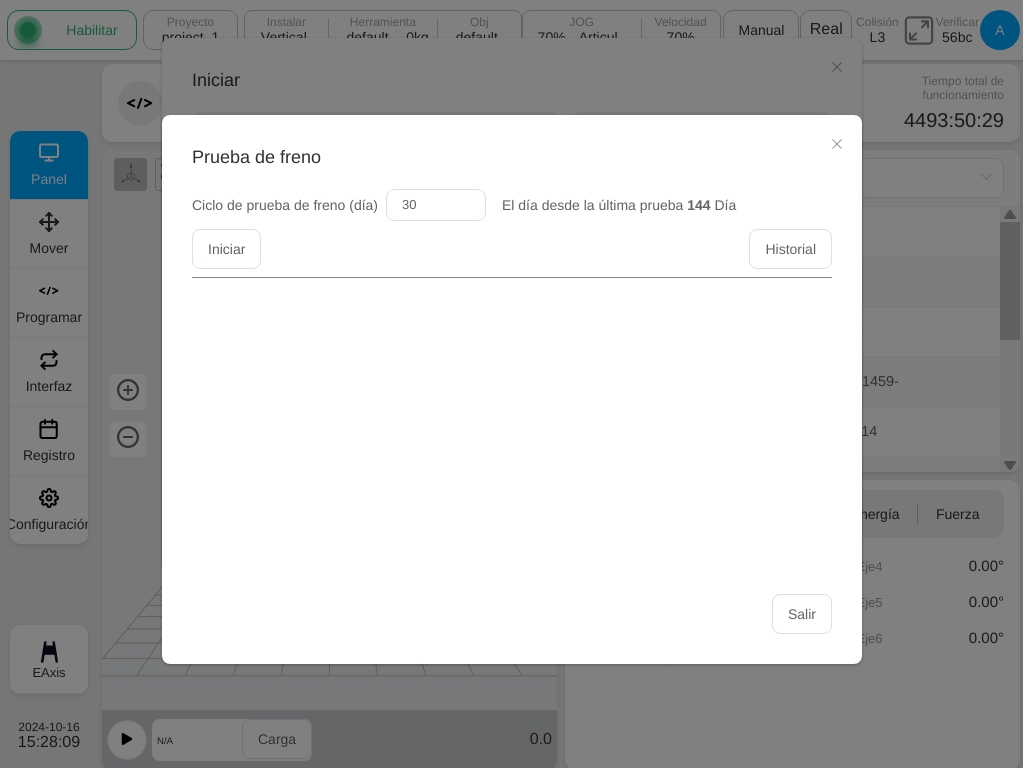
Los usuarios necesitan llevar a cabo la prueba de frenos en la fecha prevista para evitar el riesgo causado por el fallo del freno del robot. El sistema recordará periódicamente al usuario que lleve a cabo la prueba de frenado con el período de recordatorio predeterminado cada 30 días.
Cuando haya transcurrido el tiempo establecido desde la última prueba de frenado, aparecerá el siguiente cuadro de diálogo, solicitando al usuario que realice la prueba de frenado. La entrada de la prueba de frenado en la página de inicio se mostrará con un pequeño punto rojo como recordatorio al usuario.
Cuando el robot esté activado, aparecerá una entrada a la función de prueba de frenos en la página de inicio. Pulse el botón para acceder a la página de prueba de frenado que se muestra en la figura. Esta página muestra el periodo de prueba de frenado y el número de días transcurridos desde la última prueba de frenado.
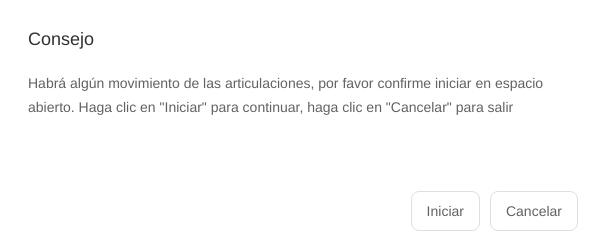
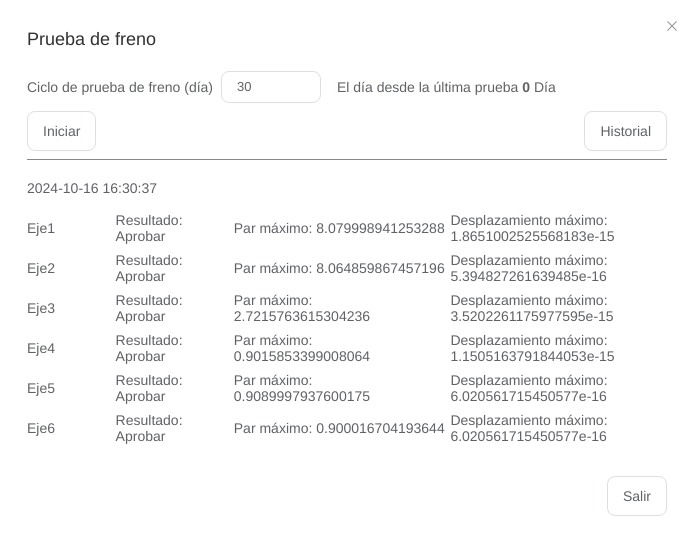
Al hacer clic en el botón «Iniciar detección», aparecerá el siguiente cuadro de diálogo y, a continuación, siga las instrucciones para realizar las operaciones. En el proceso de detección, es capaz de pausar y detener el proceso de detección en cualquier momento. Una vez finalizada la prueba, se muestra el resultado de la prueba de frenado.
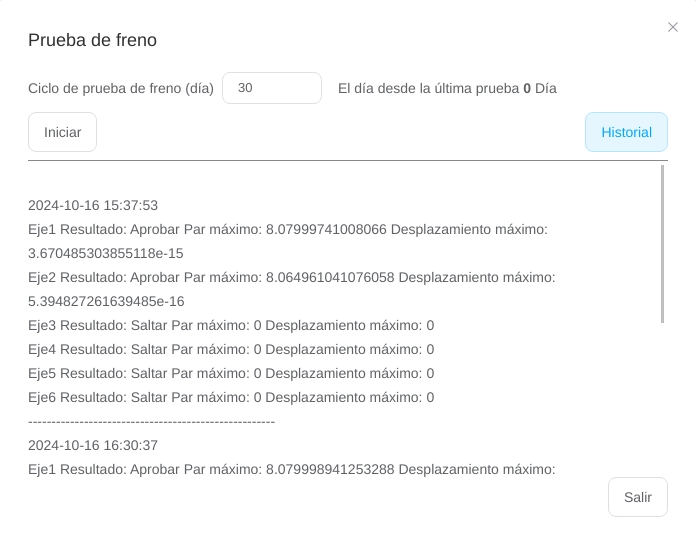
Haga clic en el botón «Datos históricos» para ver el tiempo y los resultados de pruebas de frenos anteriores.
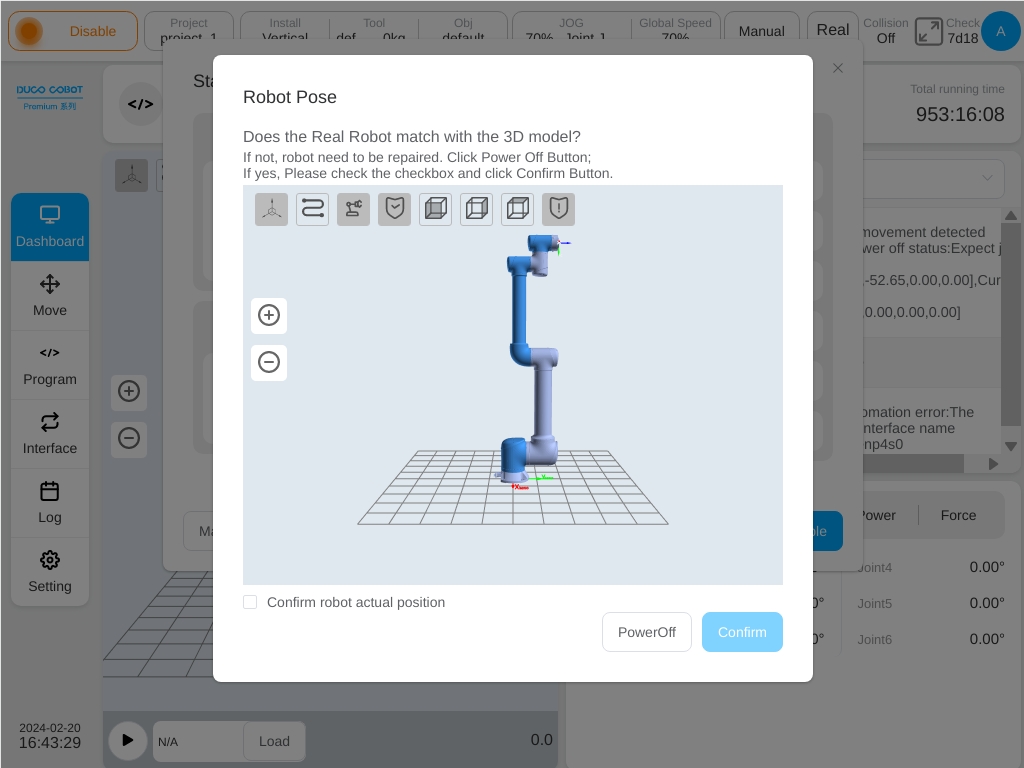
Verificación de la posición de la junta al encender#
Cuando se encienda el robot, detectará si la articulación se ha girado significativamente en el estado de apagado para garantizar la seguridad de uso.
Si la articulación se ha girado significativamente, aparecerá el siguiente cuadro de diálogo. El usuario confirma si la postura del robot real es coherente con el modelo 3D de la interfaz. En caso afirmativo, haga clic en «Confirmar que la postura del robot mostrada anteriormente coincide con la real» y, a continuación, haga clic en el botón «Confirmar» para continuar con la operación de encendido. En caso contrario, haga clic en el botón «Apagar» para desconectar la alimentación del robot y póngase en contacto con el personal de mantenimiento.