Página de interfaz#
Al hacer clic en el botón «Interfaz» de la barra de navegación, se accede por defecto a la subpágina de E/S de la página de interfaz. Hay 6 subpáginas bajo la página de Interfaz, incluyendo E/S, Registro, CCI, TCI, TCP/IP y Bus Industrial. Según el modelo de armario de control, hay dos tipos de páginas, como se muestra en la figura:
Adecuado para el armario eléctrico DC30D
Adecuado para armario eléctrico DC00 / DC15S-J9 / DC30D-J9
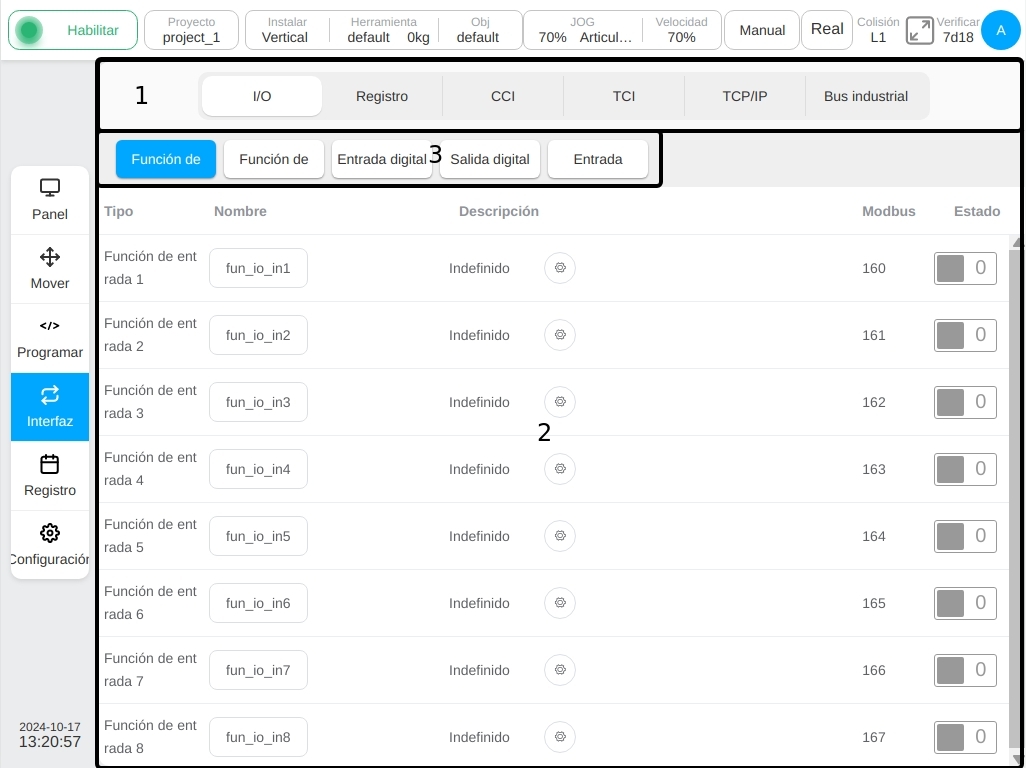
La parte superior de la página (1) es la subpágina TAB de la página de interfaz y la parte inferior (2) es el área de visualización de la subpágina correspondiente. Cuando el usuario selecciona una opción de subpágina diferente, el área ② corresponde al contenido de visualización cambiado a esta opción.
IO#
El área ② de la figura muestra los contenidos correspondientes de las diferentes pestañas de la subpágina de E/S, encima de ella está el área de visualización de la subpágina de E/S, ③ es la etiqueta hecha bajo la subpágina de E/S para las diferentes entradas y salidas.
Para el armario eléctrico DC30D, hay cinco tipos de entrada de función, salida de función, entrada general, salida general y entrada analógica en la subpágina de E/S. Haga clic en diferentes barras de etiquetas para cambiar y mostrar cinco tipos de información de estado de entrada o salida.
La interfaz de entrada de función puede supervisar el estado y la información básica de la entrada digital de 8 vías que puede establecer una función determinada en el armario eléctrico. Haga clic en una función para introducir un nombre. Se muestra un teclado virtual común. El usuario puede modificar el nombre predeterminado de la función. Una vez introducido el nombre predeterminado para la función de modificación, aparecerá el icono ① que se muestra en la figura a la derecha del cuadro de visualización del nombre. Haga clic en el icono para restaurar el nombre de entrada de la función al nombre predeterminado correspondiente.
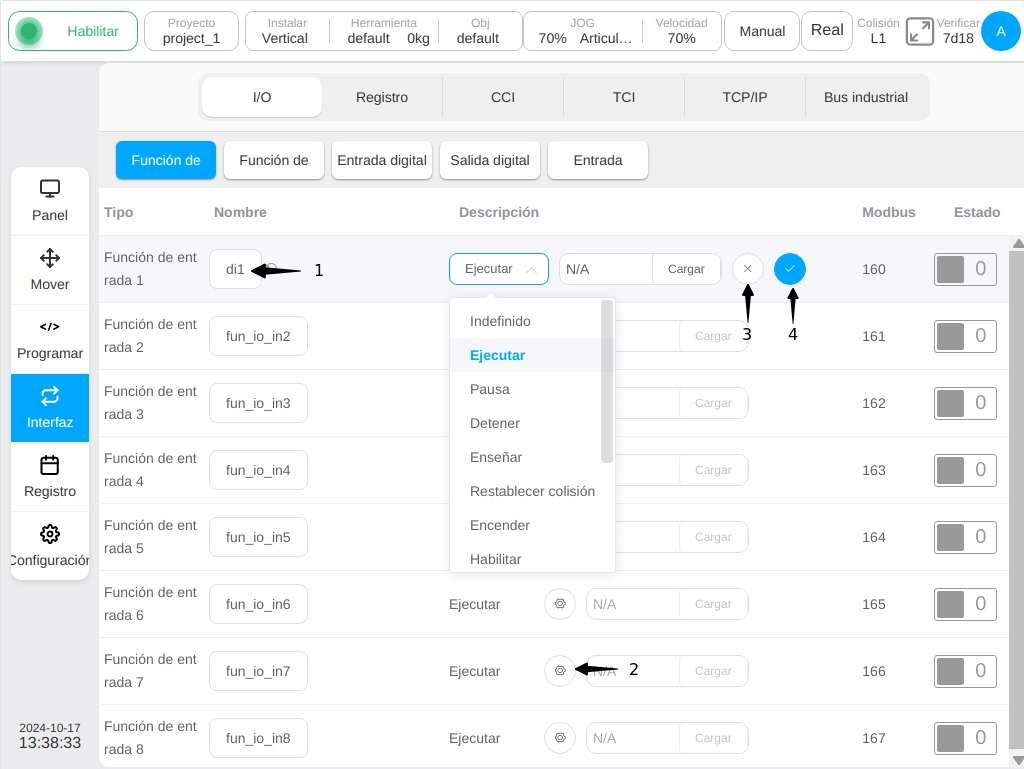
Haga clic en el icono de entrada de función correspondiente ② en la figura, se mostrarán el selector de configuración de función, el icono ③ y el icono ④ y el usuario puede seleccionar la configuración de función de la entrada de función. Seleccione la función en el cuadro desplegable del selector de funciones de visualización e introduzca el elemento de función que desea establecer. Haga clic en el icono ④ para determinar el elemento de función seleccionado. También puede anular la selección de la función seleccionada haciendo clic en el icono ③. Cuando se activa la señal de entrada de función, se activa la función de ajuste. En la actualidad, la entrada de función admite las siguientes funciones: Ejecutar, Pausa, Detener, Enseñar, Restablecimiento de colisión, Encendido, Habilitar, Deshabilitar, Apagar, Apagar, Grabar pose, Inicio, Abortar movimiento.
Nota
Correr, Pausa, Detener, Abortar El movimiento se activa mediante señales de disparo de flanco ascendente.
Nota
El comando Abort Move solo tiene efecto en la tarea de movimiento que el robot está ejecutando actualmente cuando se activa la señal de comando. Si un programa se está ejecutando, los siguientes scripts se mantendrán en ejecución continua.
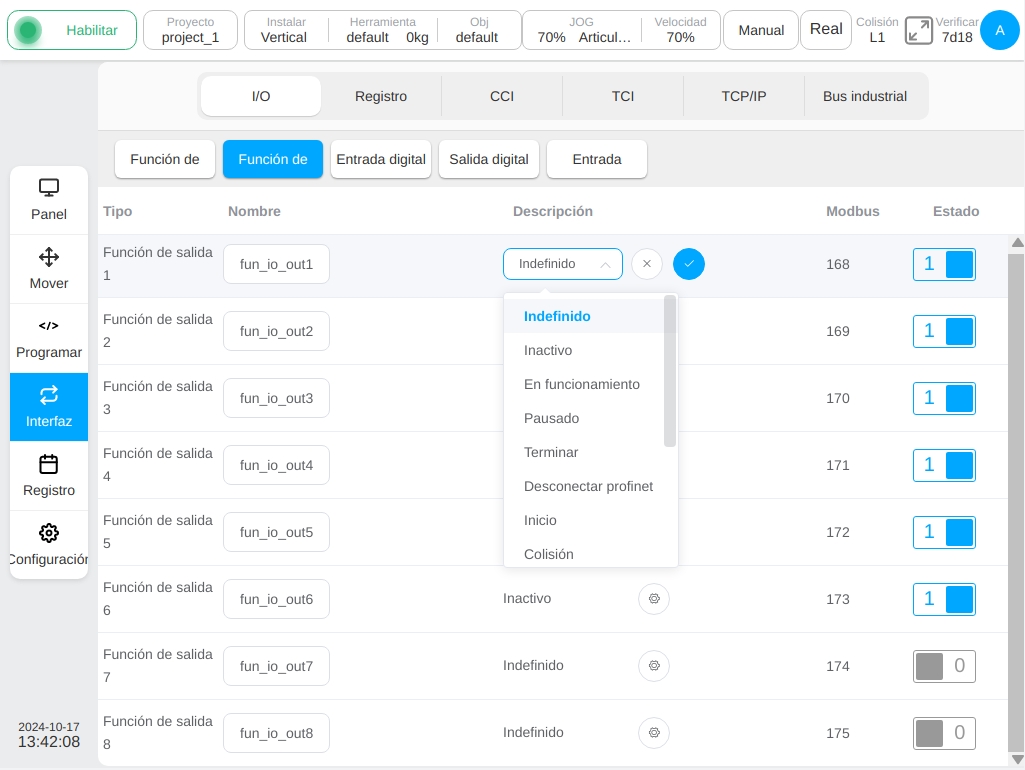
La interfaz de salida de funciones puede monitorear el estado y la información básica de la salida digital de 8 vías que puede configurar una determinada función en el gabinete de control, como se muestra en la figura. Al igual que en la interfaz de entrada de funciones, puede modificar el nombre correspondiente de la salida de función y seleccionar la configuración de función de la salida de función. En el cuadro desplegable Ajustes de función, seleccione la cantidad de estado del sistema predefinida vinculada a la salida de función. Después de hacer clic en el icono “OK”, la salida de la función reflejará el estado de la cantidad de estado del sistema establecida. En la actualidad, la salida de la función admite los estados de enlace: Inactivo, En ejecución, En pausa, Finalizar, Desconectar profinet, Inicio, Colisión, Modo automático, Apagado, Deshabilitar, Robot en movimiento, Desconectar ethernet, Alimentación del robot, Manejo, Mover abortado.
Nota
La señal de tarea de movimiento abortada solo será verdadera cuando el robot esté ejecutando actualmente una tarea de movimiento y la tarea de movimiento sea abortada por un comando de aborto de tarea de movimiento desde la entrada de E/S de función, entrada de registro de función u otra interfaz. La señal de Move Task Aborted solo se puede restablecer a través de reset la entrada de E/S de función o la entrada de registro de función, que está configurada como el origen del comando de anulación de tarea de movimiento, y la salida de E/S de función se restablece a nivel bajo al mismo tiempo.
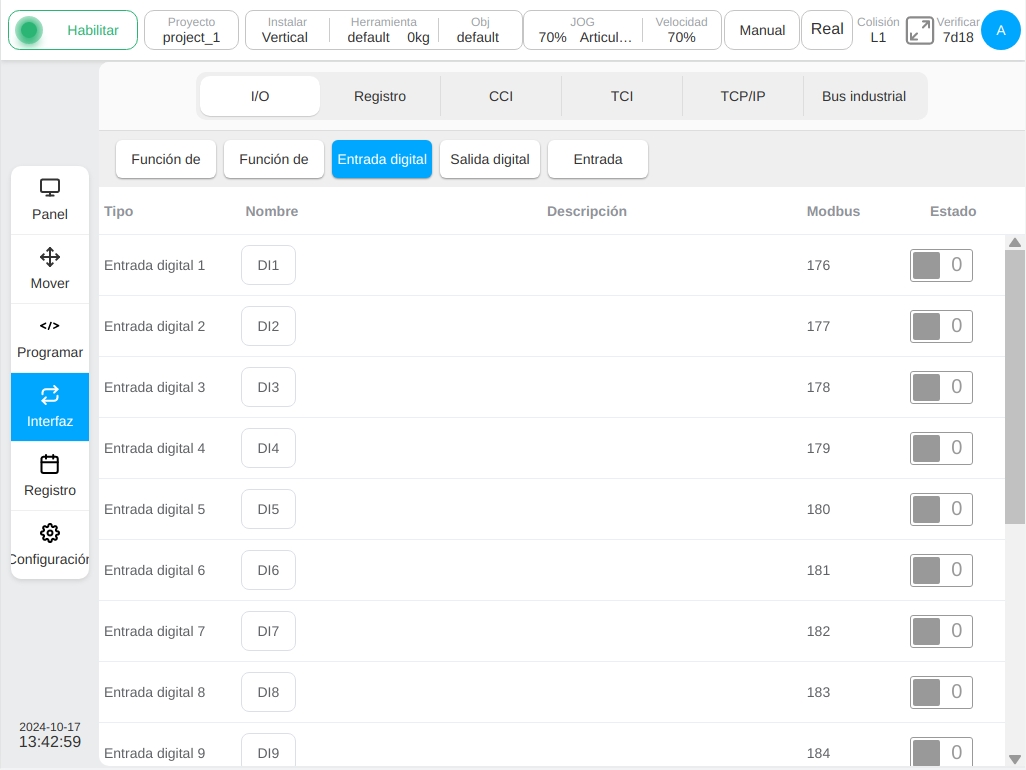
La interfaz de entrada general puede monitorizar el estado y la información básica de la entrada digital ordinaria de 16 vías del armario de control, como se muestra en la figura. A diferencia de las interfaces de entrada de función y salida de función, sólo se puede modificar el nombre correspondiente y la recuperación modificada de la señal de entrada, y no se pueden configurar funciones específicas.
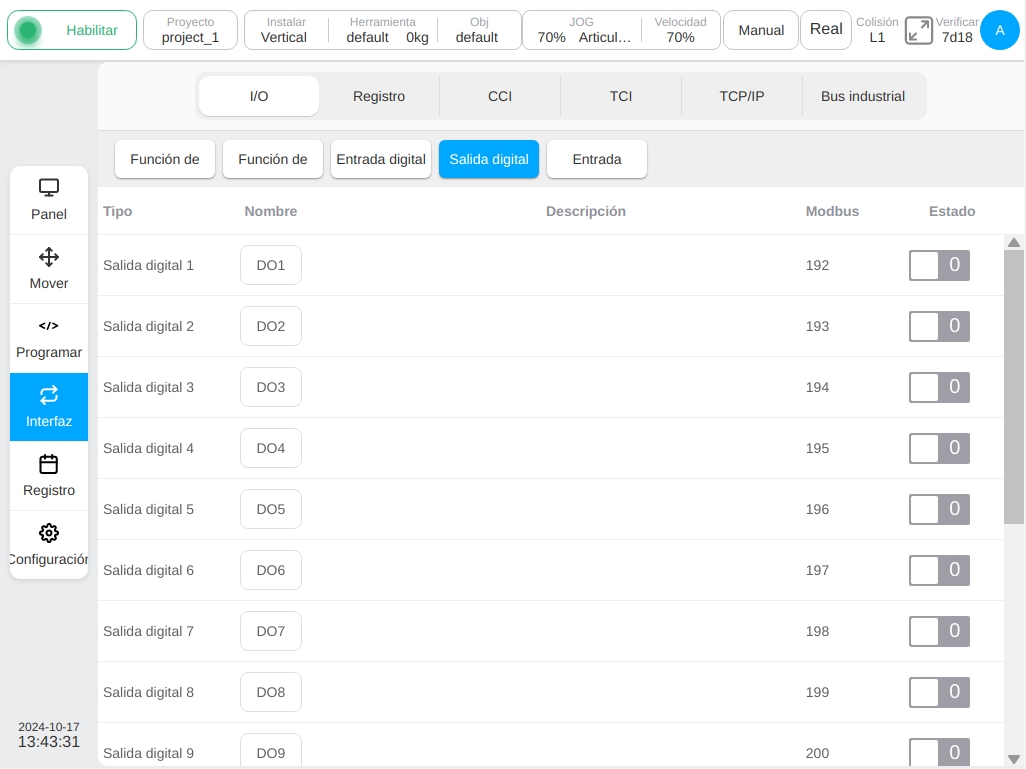
La interfaz de salida general puede monitorizar el estado y la información básica de la salida digital ordinaria de 16 canales del armario de control, como se muestra en la figura. La interfaz sólo puede modificar el nombre correspondiente y restaurar la señal de salida tras la modificación, y no puede configurar funciones específicas.
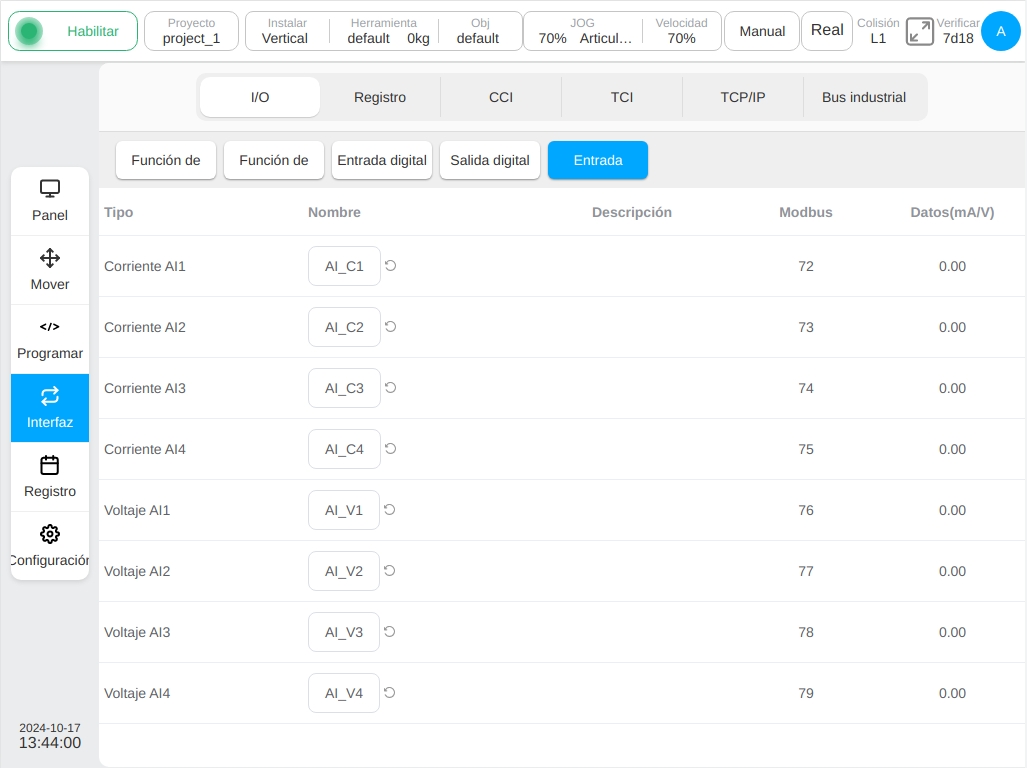
La interfaz analógica puede monitorizar 4 señales analógicas de entrada de corriente y 4 señales analógicas de entrada de tensión, como se muestra en la figura. Del mismo modo, haga clic en el cuadro de visualización del nombre de la señal de entrada analógica para modificar el nombre de la señal. Las operaciones son similares a las E/S funcionales y E/S genéricas descritas anteriormente y no se repiten aquí.
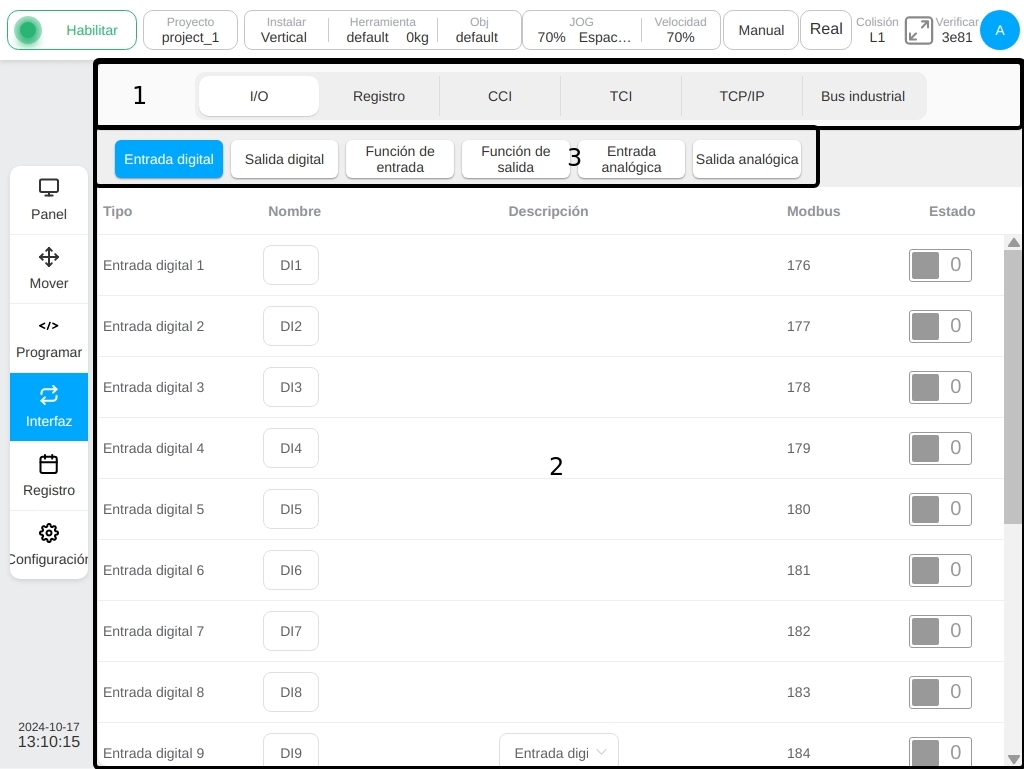
Para los armarios de control DC00 / DC15S-J9 / DC30D-J9, hay seis tipos de entrada general, salida general, entrada de función, salida de función, entrada analógica y salida analógica en la subpágina de E/S. Haga clic en diferentes barras de etiquetas para cambiar y mostrar seis tipos de información de estado de entrada o salida.
La interfaz de entrada general puede monitorizar el estado y la información básica de la entrada digital ordinaria de 16 vías del armario eléctrico, como se muestra en la figura. Los ocho tipos de entrada digital DI9 a DI16 pueden configurarse como entrada de función o entrada general en la columna de descripción ① de la página.
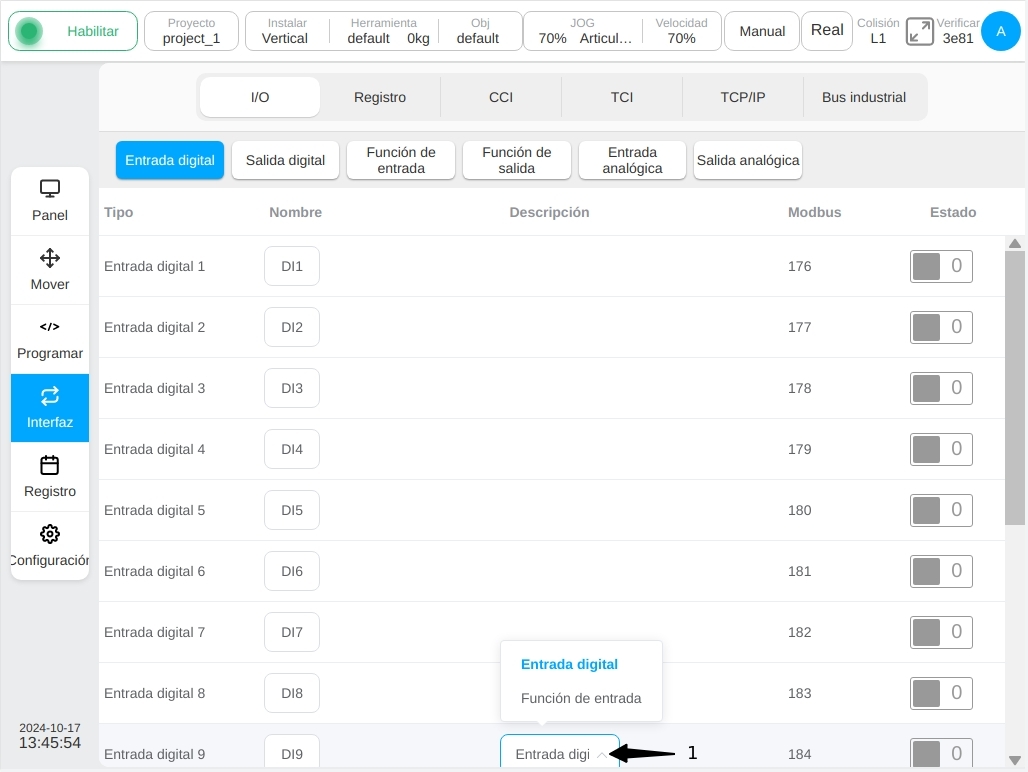
Si el usuario selecciona cada entrada de dígito como entrada de función, el estado de entrada de dígito se desactiva en la página de entrada general de E/S y el estado de dígito configurado como entrada de función se muestra en la subpágina de entrada de función. Por ejemplo, si DI9 y DI10 se configuran como entrada de función, la página TAB de entrada de función bajo la subpágina de E/S se muestra en la siguiente figura.
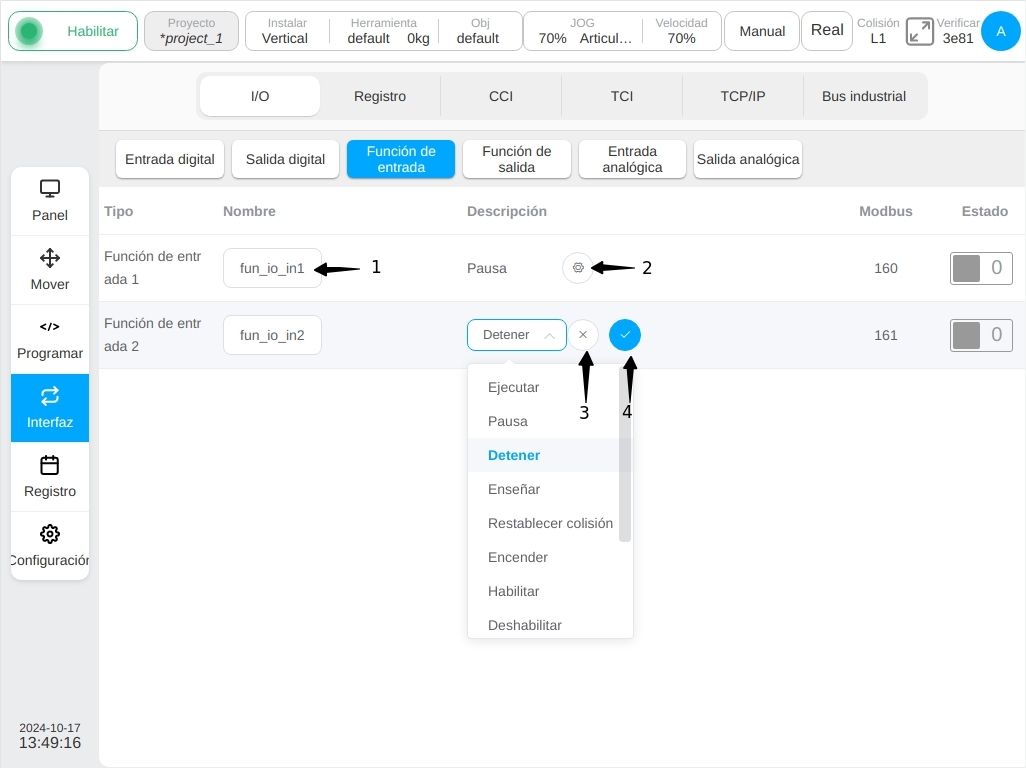
Del mismo modo, al hacer clic en el nombre de una entrada de función aparecerá un teclado virtual normal, y el usuario podrá modificar el nombre por defecto de la entrada de función. Una vez introducido el nombre por defecto de la función modificada, el icono ① de la figura anterior aparecerá a la derecha del cuadro de visualización de nombres. Haga clic en el icono para restaurar el nombre de entrada de función al nombre predeterminado correspondiente.
- Haga clic en el icono de entrada de función correspondiente ② en la figura, se mostrará el selector de ajustes de función, icono ③ e icono ④, y podrá seleccionar la función Ajustes de la entrada de función. Seleccione la función en el cuadro desplegable del selector de funciones de visualización e introduzca el elemento de función que desea configurar. Pulse el icono ④ para determinar el elemento de función seleccionado. El usuario también puede anular la selección de la función seleccionada haciendo clic en el icono ③. Cuando se activa la señal de entrada de función, se activa la función establecida.
La entrada de función actual admite las siguientes funciones: Ralentí, En marcha, En pausa, Finalizar, Desconectar profinet, Inicio, Colisión, Modo automático, PowerOff, Desactivar, Robot en movimiento, Desconectar ethernet, Alimentación del robot.
Nota
Correr, Pausa, Detenerse se activa mediante señales de disparo de flanco ascendente.
La interfaz de salida universal puede monitorizar el estado y la información básica de la salida digital ordinaria de 16 canales en el armario de control, como se muestra en la figura. Los tipos de entrada digital DO9-DO16 pueden configurarse como entrada de función o entrada general en la columna de descripción ① de la página.
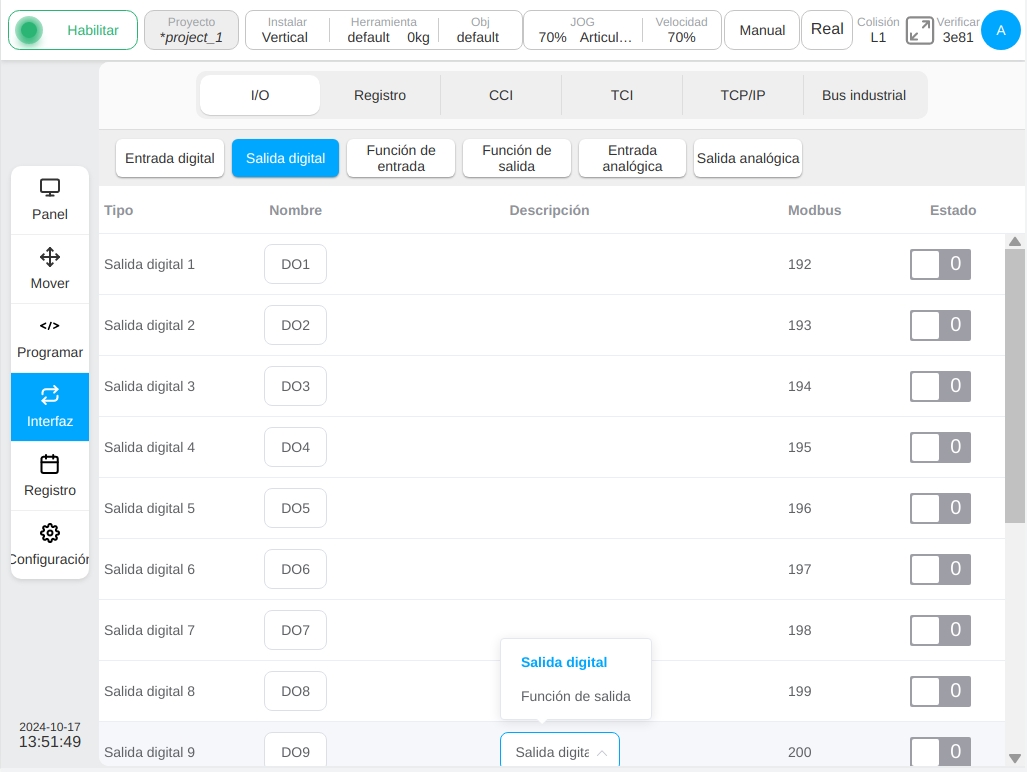
Del mismo modo, si cada salida digital general se selecciona como salida de función, la salida digital de esta ruta se muestra como desactivada en la página de salida general de E/S, y el estado digital de cada ruta configurada como salida de función se muestra en la página de subpestaña de salida de función. Por ejemplo, DO9, DO10, DO11, y DO12 están configurados como salida de función. La siguiente figura muestra la página TAB de salida de función de la subpágina E/S.
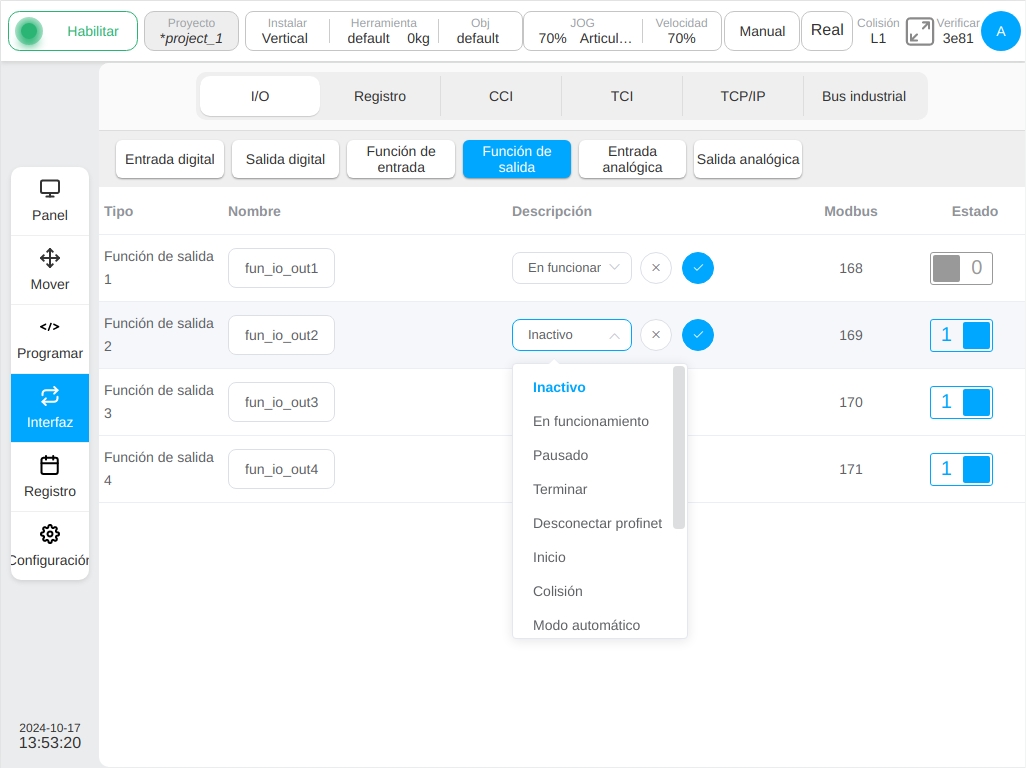
Del mismo modo que en la entrada de función TAB, haga clic en el nombre de la salida de función y aparecerá un teclado virtual común. El usuario puede modificar el nombre predeterminado de la salida de función. Una vez modificado el nombre predeterminado de la salida de función, a la derecha del cuadro de visualización del nombre aparece el icono ① de la figura anterior. Haga clic en el icono para restablecer el nombre predeterminado de la salida de función.
Haga clic en el icono de salida de función correspondiente ② en la figura, se mostrará el selector de Ajustes de función, el icono ③ y el icono ④, y se podrán seleccionar los Ajustes de función de la salida de función. En el cuadro desplegable del selector de funciones de visualización, seleccione el elemento de función que la salida de función desea configurar. Haga clic en el icono ④ para determinar el elemento de función seleccionado. El usuario también puede anular la selección de la función seleccionada haciendo clic en el icono ③. Cuando se activa la señal de salida de función, se inicia la función establecida. Actualmente, la salida de función soporta las siguientes funciones: estado de reposo, estado de ejecución de programa, estado de pausa, fin de programa, desconexión de profinet, posición inicial, colisión, modo automático, no encendido, no habilitado, movimiento del robot, desconexión de ethernet/ip, estado de alimentación de 48V del robot.
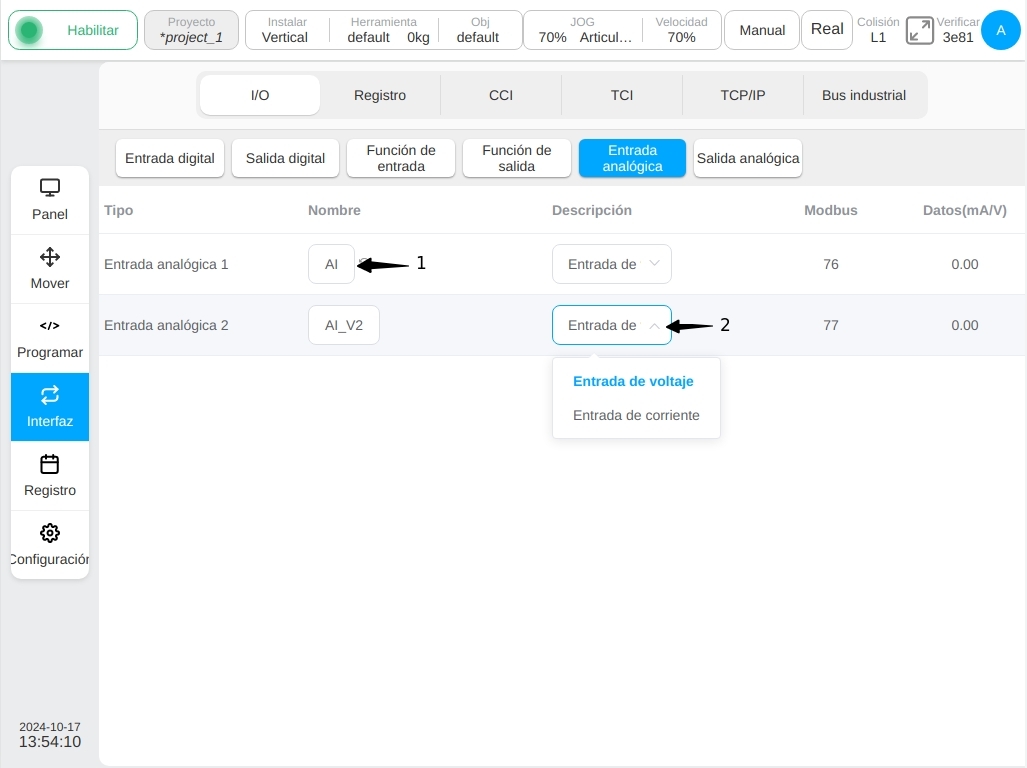
La interfaz de entrada analógica puede monitorizar 2 señales de entrada analógica, como se muestra en la figura. Para modificar el nombre de la señal de entrada analógica, haga clic en la casilla de nombre de la señal de entrada analógica. Después de modificar el nombre por defecto de la entrada analógica, aparecerá el icono ① de la figura a la derecha de la casilla de visualización del nombre. Haga clic en el icono para restaurar el nombre de la entrada analógica al nombre predeterminado correspondiente. Y la señal de entrada analógica se puede explicar en la columna de descripción icono ② para seleccionar la entrada de tensión o entrada de corriente.
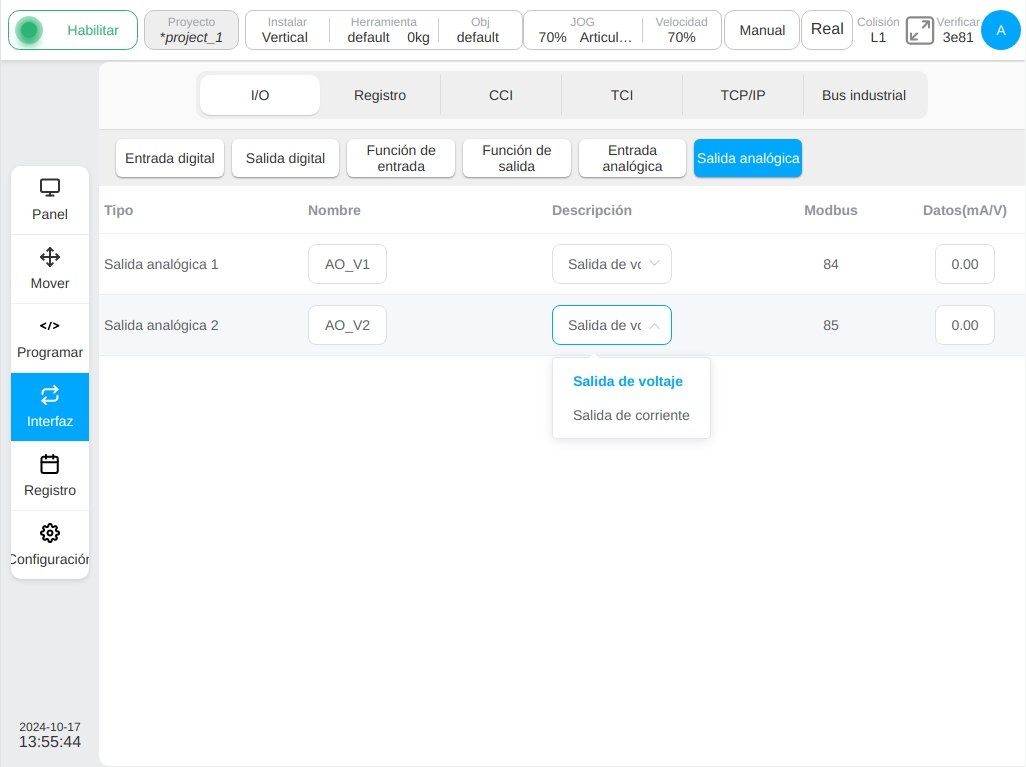
La interfaz de salida analógica puede monitorizar 2 señales de salida analógica, como se muestra en la figura. Del mismo modo, haga clic en el cuadro de visualización del nombre de la señal de entrada analógica para modificar el nombre de la señal. El funcionamiento es similar al de la entrada analógica descrito anteriormente y no se repite aquí. Y la señal de salida analógica se puede explicar en la columna de descripción selección de configuración, el usuario puede elegir la salida de tensión o la salida de corriente.
Regístrese en#
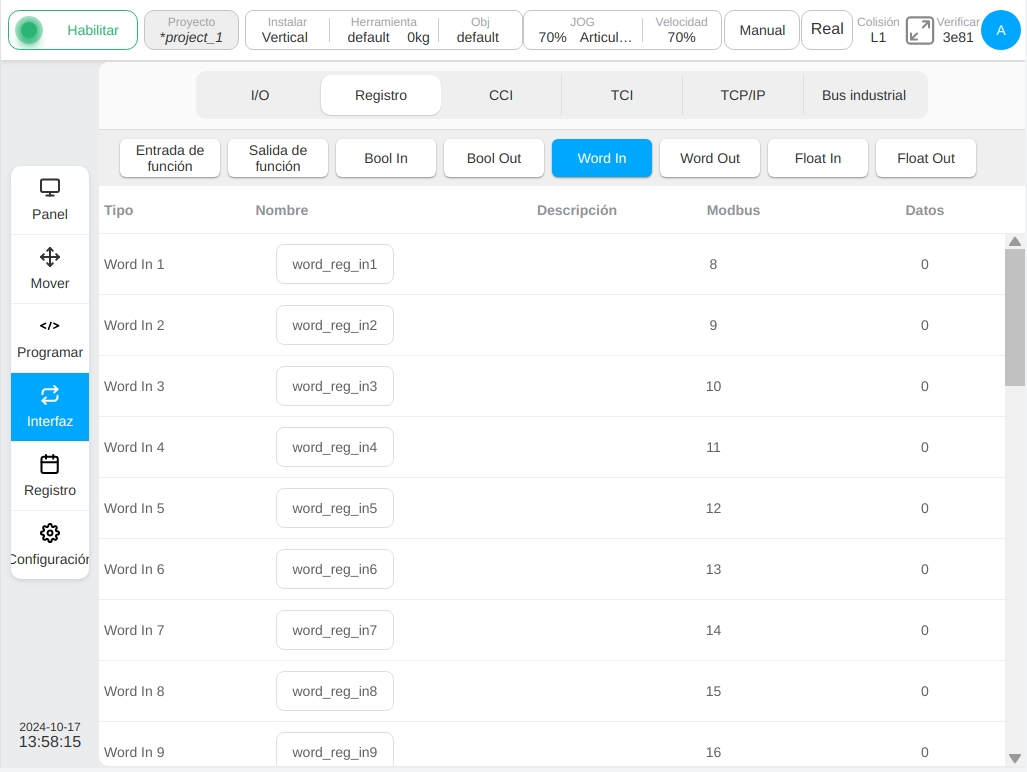
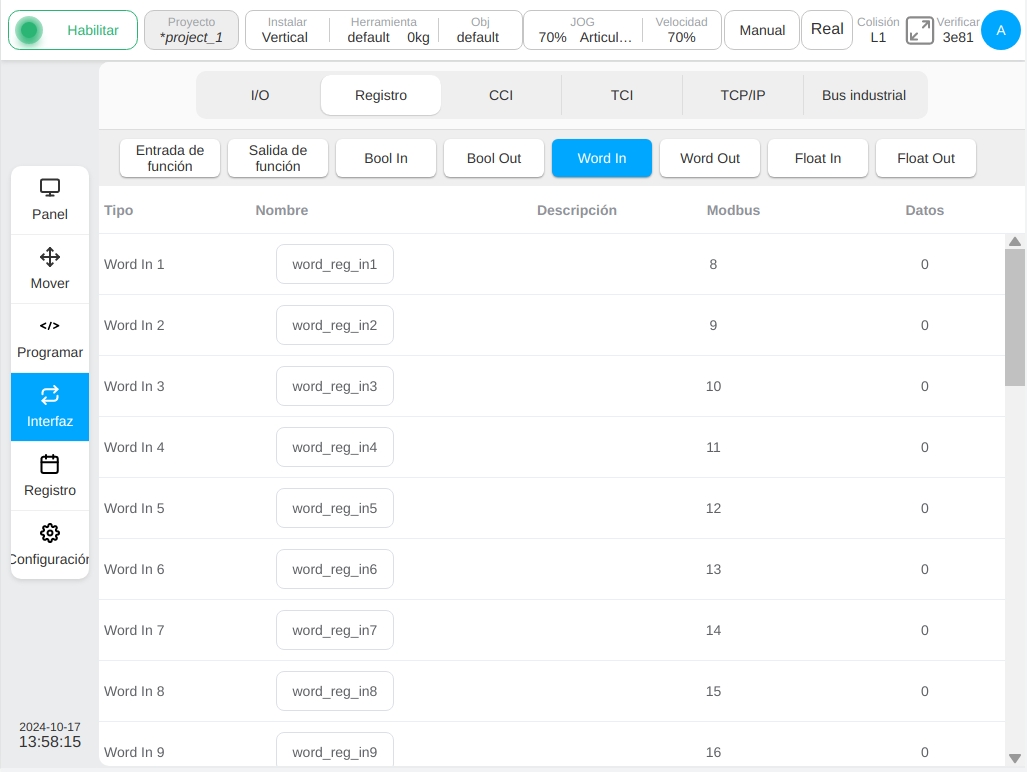
La subpágina de registro es similar a la subpágina de E/S, la parte superior de la página está etiquetada para diferentes tipos de entradas y salidas, que son: Entradas de Función, Salidas de Función, Entradas Bool, Salidas Bool, Entradas Word, Salidas Word, Entradas Float y Salidas Float, en total 8 tipos. Haga clic en las diferentes pestañas para cambiar la visualización de los ocho tipos de información de datos de entrada o salida.
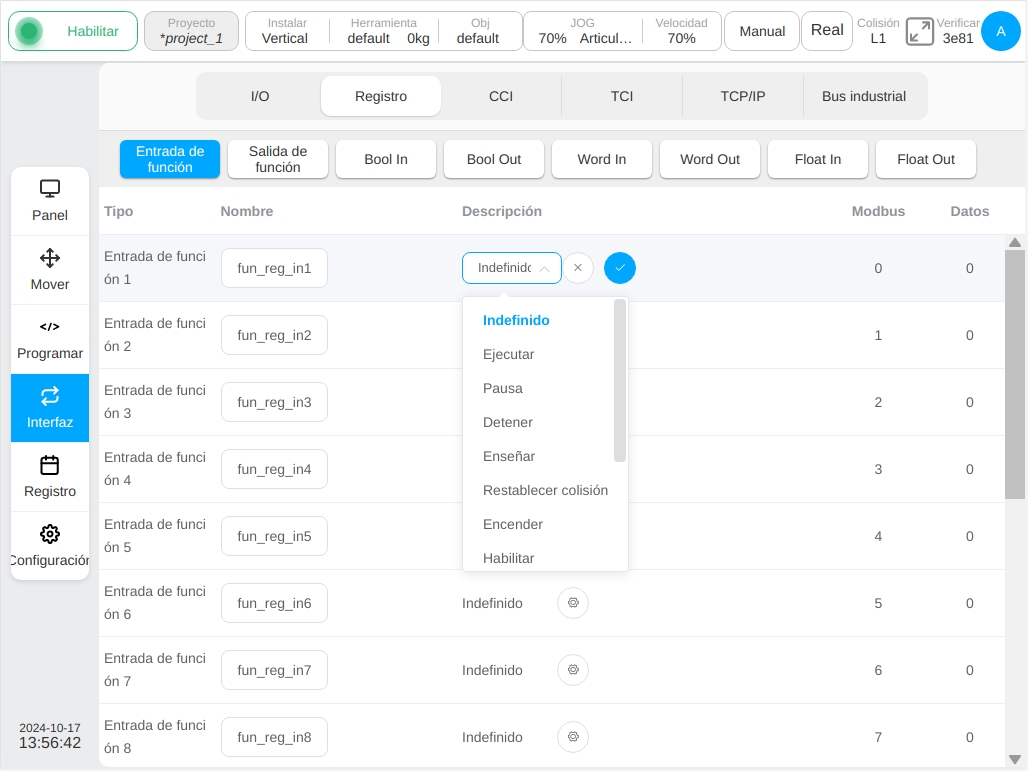
La interfaz de entrada de función de registro puede monitorizar la información de estado de 16 registros de entrada de función dentro del robot, como se muestra en la figura. Al igual que la entrada de función de la subpágina de E/S, el nombre de la entrada de función puede modificarse y restaurarse después de la modificación y pueden configurarse elementos de función específicos para este tipo de señal de registro. Los elementos de función actualmente soportados por la entrada de función de registro son los mismos que las funciones de soporte de entrada de función en la subpágina E/S anterior.
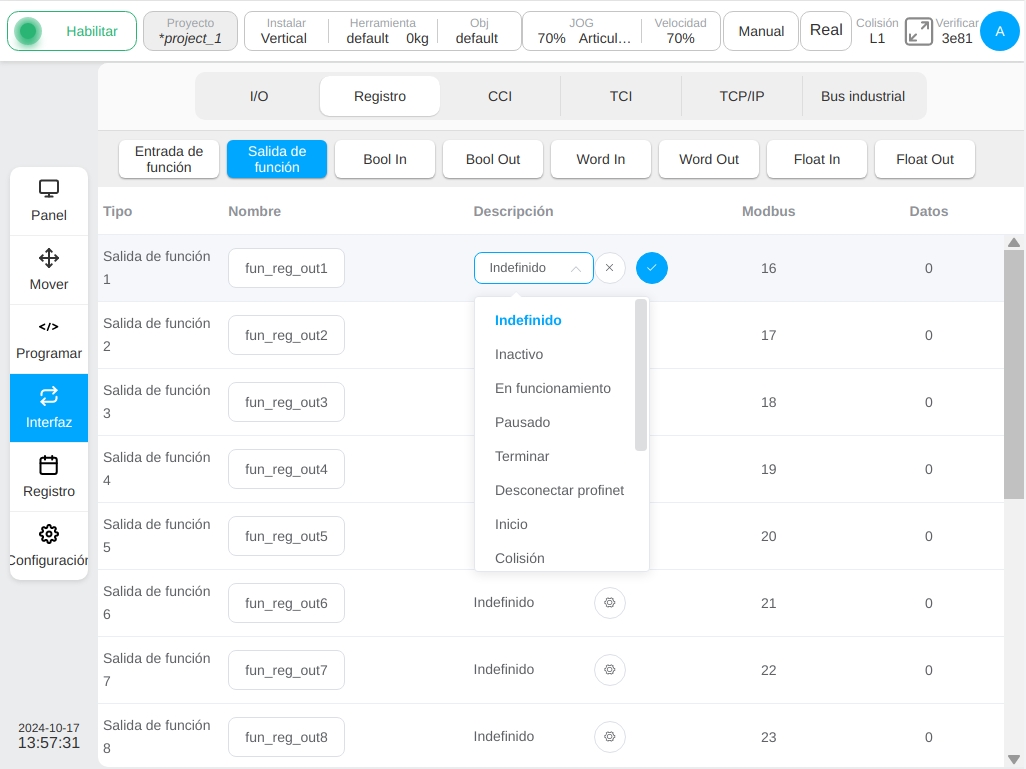
La interfaz de salida de la función de registro puede monitorear la información de estado de 16 registros de salida de función dentro del robot, como se muestra en la figura. Al igual que la salida de función de la subpágina de E/S, el nombre de salida de la función se puede modificar y restaurar después de la modificación, y la señal de registro de clase se puede vincular a una cantidad de estado predefinida del sistema específica. En la actualidad, los estados de enlace admitidos por la salida de la función de registro son: Inactivo, En ejecución, En pausa, Finalizar, Desconectar profinet, Inicio, Colisión, Modo automático, Apagar, Deshabilitar, Robot en movimiento, Desconectar ethernet, Alimentación del robot, Manejo, Mover abortado.
Nota
La señal de tarea de movimiento abortada solo será verdadera cuando el robot esté ejecutando actualmente una tarea de movimiento y la tarea de movimiento sea abortada por un comando de aborto de tarea de movimiento desde la entrada de E/S de función, entrada de registro de función u otra interfaz. La señal de tarea de movimiento abortada solo se puede restablecer a través de restablecer la entrada de E/S de función o la entrada de registro de función, que está configurada como el origen del comando de anulación de tarea de movimiento, y la salida del registro de función se restablece a nivel bajo al mismo tiempo.
Interfaz de entrada de registros booleanos Muestra la información de estado de 64 registros de entrada booleanos. La interfaz puede modificar y restaurar el nombre del registro después de la modificación, y no puede establecer elementos de función específicos.
Interfaz de registro de salida booleana Muestra la información de estado de 64 registros de salida booleana. Del mismo modo, la interfaz sólo puede modificar y restaurar los nombres de registro después de la modificación, y no puede establecer elementos de función específicos.
Los registros Word Input interface y Float Input interface muestran la información de estado de 32 registros de entrada de tipo byte y 32 registros de entrada de tipo coma flotante respectivamente. Sólo pueden modificar el nombre del registro y modificar la recuperación, no tienen la función específica de ajuste y no pueden operar el cuadro de visualización de datos de la columna de datos.
La interfaz de salida Register Word y la interfaz de salida Float muestran la información de estado del registro de salida de tipo 32 bytes y del registro de salida de tipo 32 coma flotante respectivamente. Al igual que la interfaz de salida de registro Bool, pueden modificar el nombre del registro y restaurarlo después de la modificación y también pueden operar el cuadro de visualización de datos de la columna de datos.
CCI#
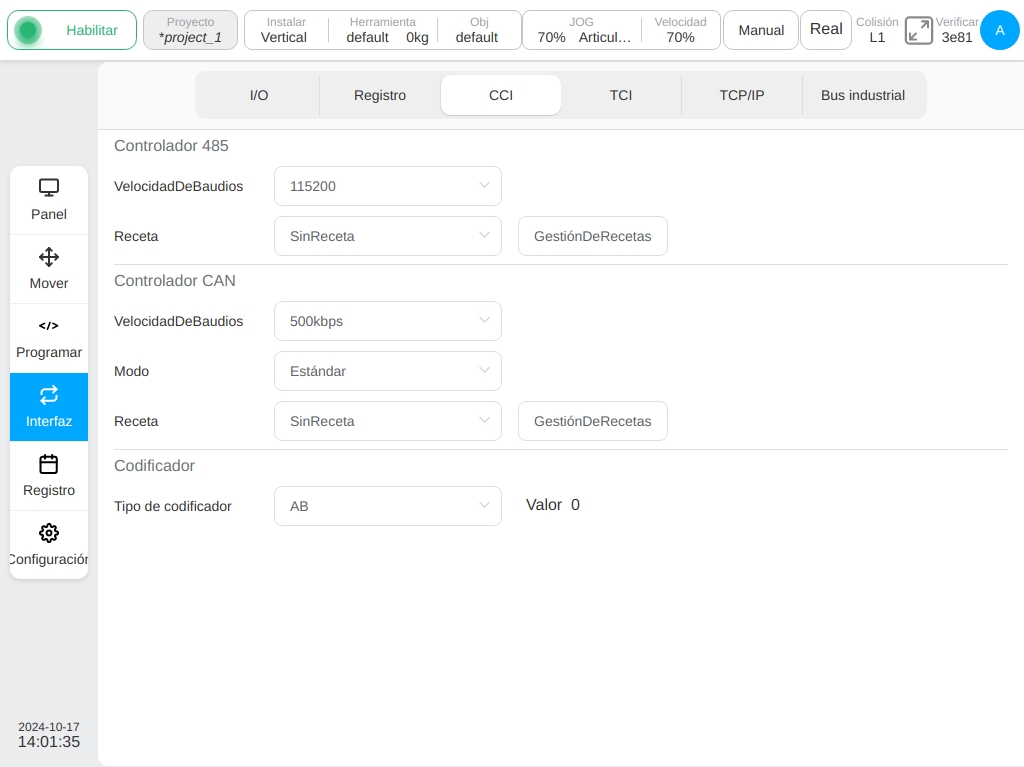
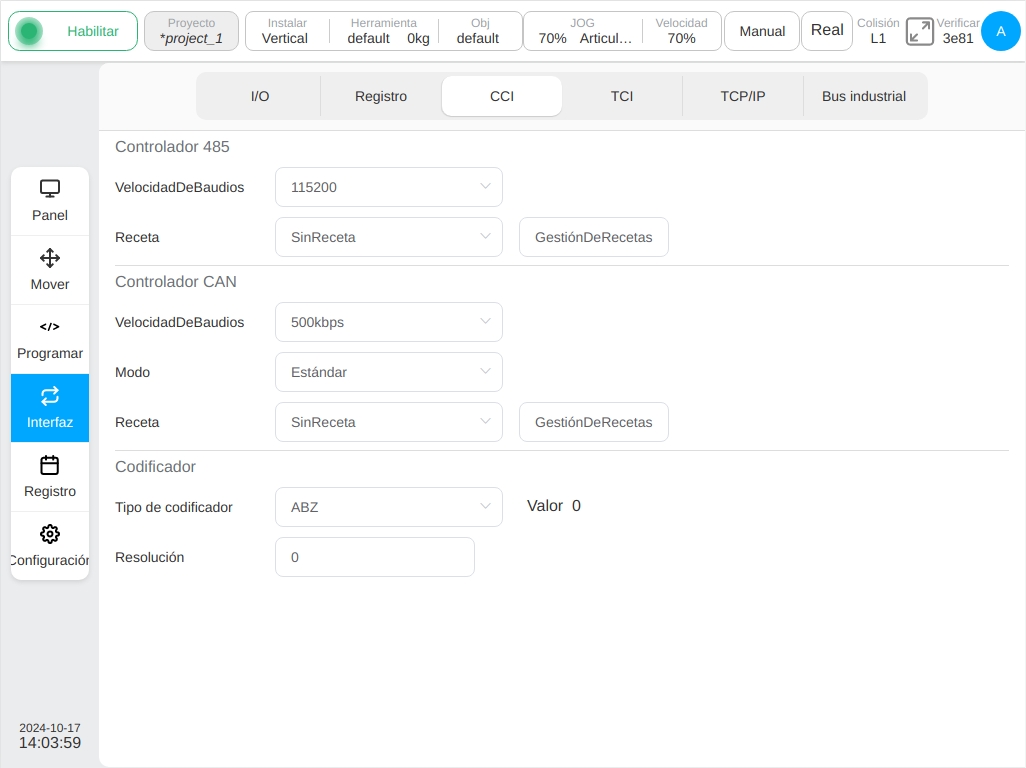
La subpágina CCI sirve para configurar el puerto 485, el puerto CAN y la interfaz del codificador del armario eléctrico, principalmente para establecer la velocidad de transmisión y la configuración del modo, la fórmula y establecer el tipo de codificador del puerto 485 y del puerto CAN del armario eléctrico. Como se muestra en la figura.
La velocidad en baudios del puerto 485 del armario eléctrico puede seleccionarse en la lista desplegable del selector de velocidad en baudios. El puerto 485 admite tasas de baudios de 9600, 19200, 38400, 57600 y 115200. Seleccione el archivo de recetas para el puerto en la lista desplegable del selector de recetas.
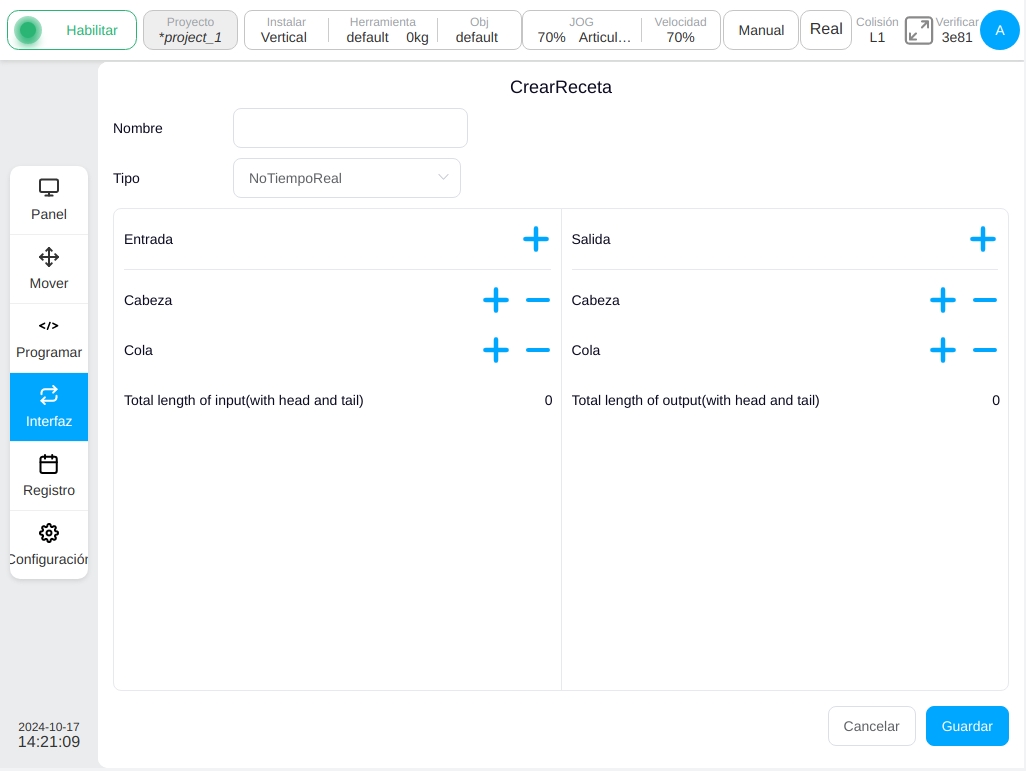
Como se muestra en la imagen anterior, el cuadro desplegable muestra el nombre del archivo de recetas definido por el usuario. Haga clic en el botón «Gestión de fórmulas» y aparecerá el cuadro de lista de gestión de fórmulas. La interfaz muestra los archivos de fórmulas existentes en el proyecto actual. Los usuarios pueden añadir, eliminar y editar la fórmula.
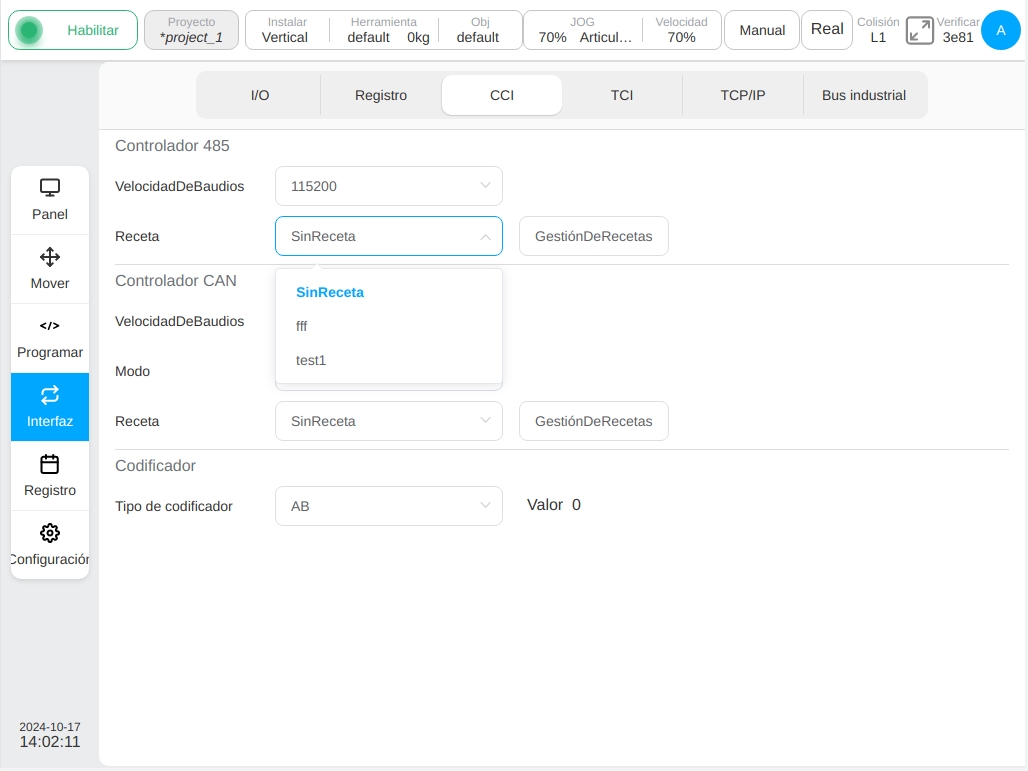
Haga clic en cualquier archivo de receta de la lista de recetas y aparecerá un cuadro emergente con los botones «Editar» y «Eliminar» en el lado derecho. Los usuarios pueden modificar o eliminar el archivo de recetas existente.
La velocidad en baudios y los ajustes de fórmula del puerto CAN del armario de control son similares a los del puerto 485 y no se tratan aquí. Las velocidades en baudios de los puertos CAN son 10kbps, 20kbps, 50kbps, 100kbps, 125kbps, 250kbps, 500kbps y 1000kbps. Existen dos modos de configuración CAN: trama estándar y trama extendida.
Existen dos tipos de configuraciones de encóder del armario eléctrico: AB y ABZ. El número de impulsos del codificador registrados por el sistema actual se muestra en el lado derecho del codificador. Si el tipo de codificador se establece en ABZ, el usuario también debe establecer el número de líneas del codificador. El valor por defecto es 0.
TCI#
- La subpágina TCI muestra la información de E/S de la placa final, información relacionada con la interfaz reutilizable final. La placa final tiene entradas de herramienta de 2 canales y salidas de herramienta de 2 canales, que son las mismas que las señales de entrada/salida de propósito general de la subpágina E/S. Esta interfaz permite al usuario modificar los nombres de entrada y salida de herramientas y restaurar los nombres predeterminados después de la modificación.
El usuario puede configurar el modo de salida de herramienta, y el modo de configuración de salida de herramienta de 2 canales se forzará a ser unificado, es decir, configure cualquier modo de salida de herramienta a modo PNP o modo NPN, y el otro modo de salida de herramienta se cambiará en consecuencia. El usuario también puede configurar el estado de salida de herramienta, 0 significa electrónica de bajo nivel y 1 significa electrónica de alto nivel, como se muestra en la figura.
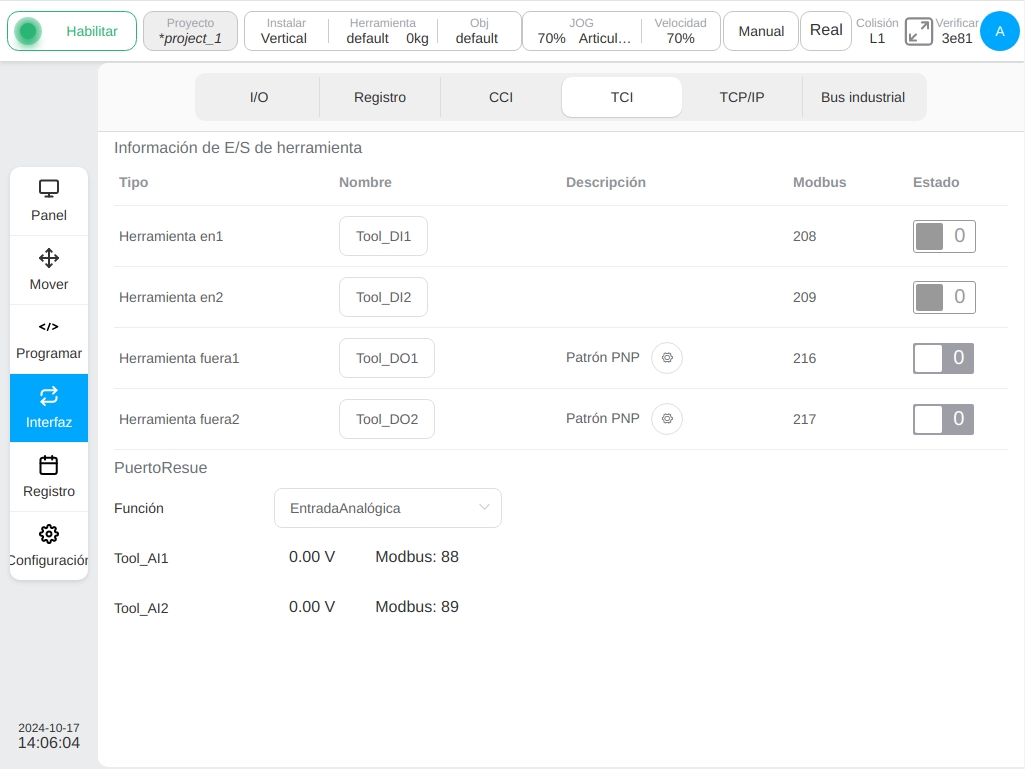
Antes de utilizarlo, el usuario puede configurar la función de interfaz terminal es entrada analógica o interfaz 485 y obtener la señal correspondiente según la configuración. Como se muestra en la figura anterior, cuando la función de interfaz terminal se configura como entrada analógica, la interfaz muestra los datos de las dos entradas analógicas de tensión y las direcciones Modbus correspondientes en tiempo real. Si la interfaz terminal está configurada como 485, la interfaz muestra la velocidad en baudios y la información de configuración de la fórmula, como se muestra en la figura siguiente.
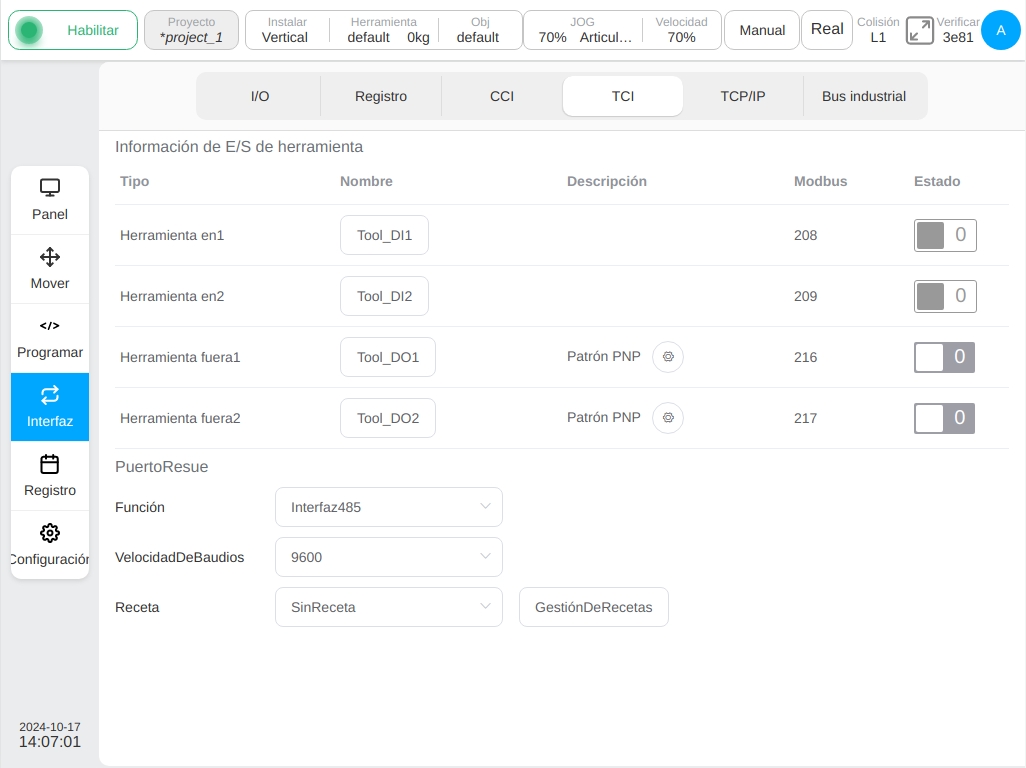
La velocidad en baudios y la fórmula se pueden configurar en la interfaz 485 final. El funcionamiento específico es similar a la configuración del puerto 485 del armario de control en la subpágina CCI, que no se trata aquí.
TCP/IP#
- La subpágina TCP/IP muestra principalmente la información de la conexión TCP/IP externa del robot.
Contiene principalmente tres subpestañas: Red por defecto, Servidor personalizado y Cliente personalizado.
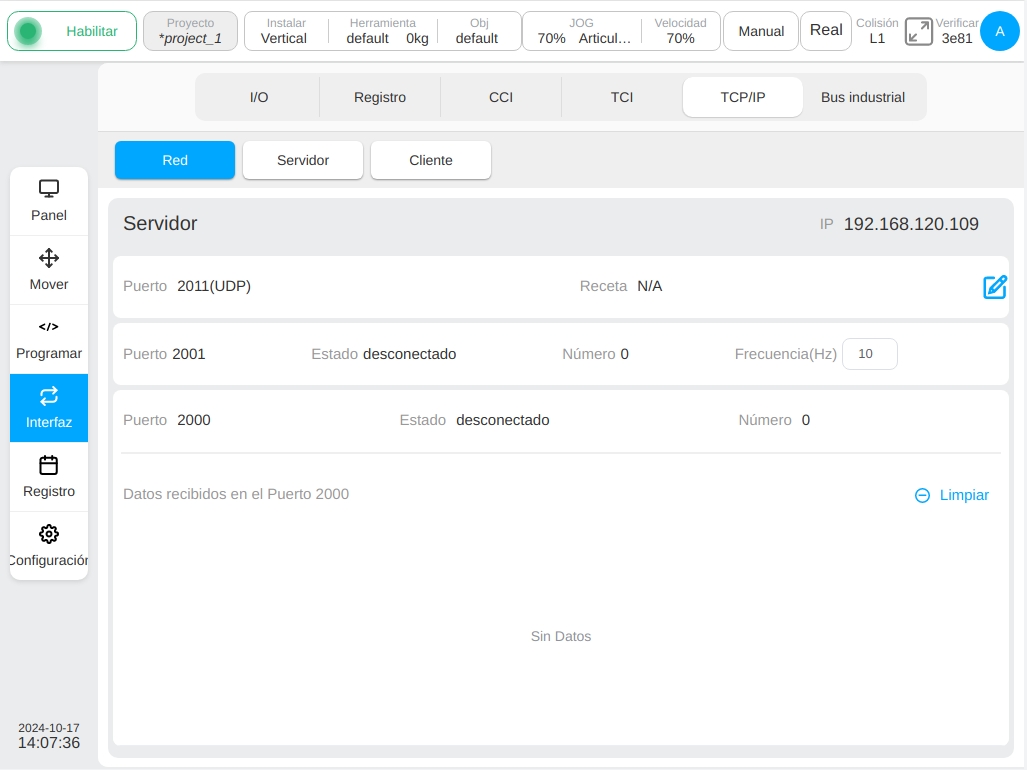
- La página de la subpestaña de red por defecto muestra información sobre los puertos 2000, 2001 y 2011 como servidor.
Muestra el estado de conexión y el número de conexiones para la IP del sistema y los puertos 2000 y 2001.
Nota
La dirección IP mostrada en el servidor corresponde a la dirección IP del punto de red LAN1. Para la configuración de la dirección de LAN1, consulte «Configuración de red».
El puerto 2000 puede recibir los comandos de control del robot. La información recibida por el puerto 2000 se muestra en la parte inferior de la página.
Por defecto, el puerto 2001 enviará la información de estado actual del robot a una frecuencia de 10Hz, la frecuencia se puede ajustar, y el rango es de 1hz-100hz
El puerto 2011 es un puerto UDP que permite controlar el robot a través de elementos de datos configurados en la receta.
Para obtener más información sobre cómo utilizar los puertos 2000 y 2001, consulte la Descripción de las interfaces de comunicación externas para el robot colaborativo.
Para más detalles sobre cómo utilizar el oporto 2011, consulte las instrucciones de la receta.
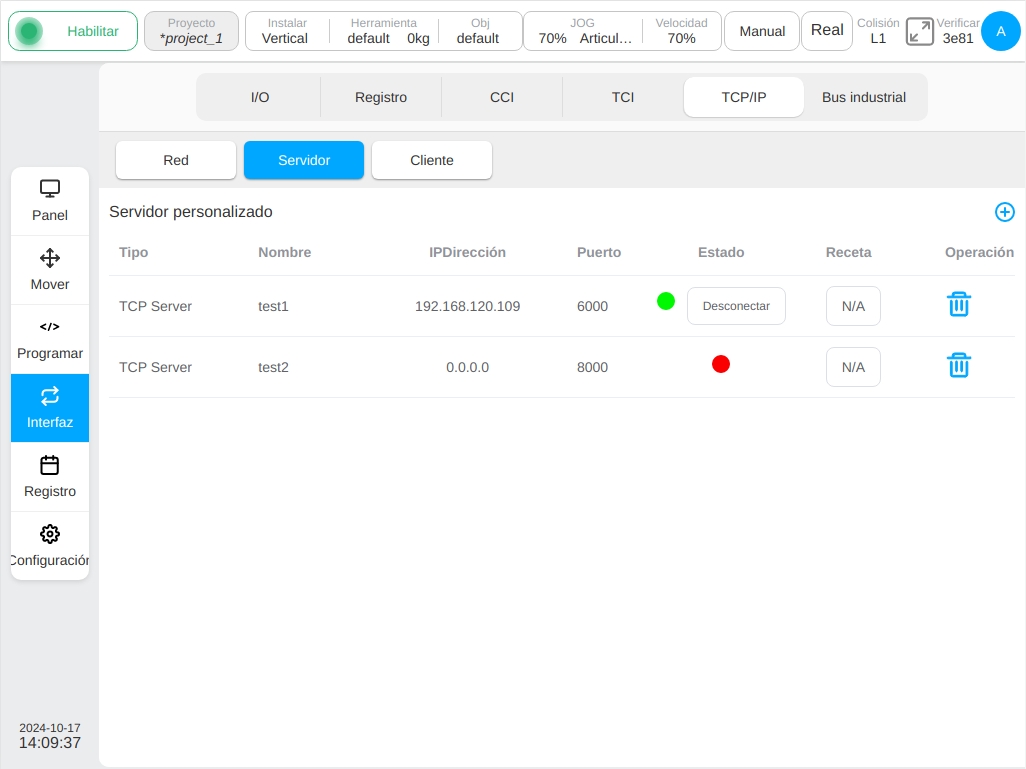
- La subpestaña Servidor personalizado muestra la lista de servidores de socket creados por el usuario, incluyendo el tipo de servidor personalizado, el nombre, la dirección IP del cliente conectado, el puerto, el estado de la conexión, la receta y el icono de operación.
Cuando la luz de estado de la conexión esté verde, puede pulsar el botón «Desconectar» situado a la derecha de la luz de estado para desconectarse. Haga clic en el botón Receta para establecer la receta, y haga clic en el icono
 de la columna de acción para eliminar el servidor personalizado añadido.
Haga clic en el icono
de la columna de acción para eliminar el servidor personalizado añadido.
Haga clic en el icono  en la parte superior derecha de la página para abrir una ventana emergente para añadir una conexión, introduzca el nombre y el número de puerto, y haga clic en el botón «Aceptar» para añadir un servidor personalizado.
en la parte superior derecha de la página para abrir una ventana emergente para añadir una conexión, introduzca el nombre y el número de puerto, y haga clic en el botón «Aceptar» para añadir un servidor personalizado.
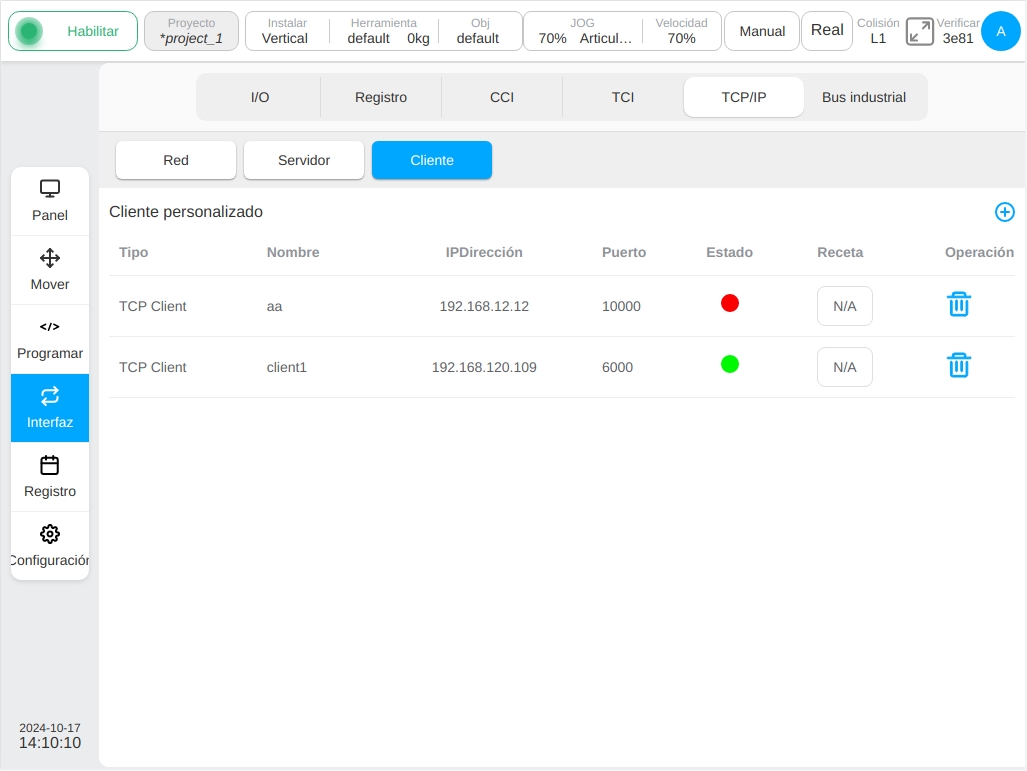
- La subpestaña Cliente personalizado muestra toda la información de conexión del robot como cliente, incluyendo el tipo de cliente personalizado (TCP/UDP), nombre, dirección IP, puerto, receta e icono de operación.
Pulse el botón Receta para establecer la receta y pulse el icono de la columna de acción
para eliminar el cliente personalizado añadido.
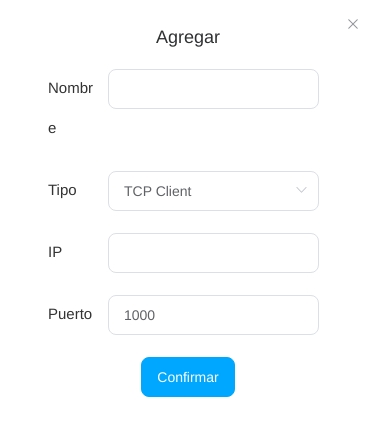
La conexión se puede establecer en el programa utilizando un script o haciendo clic en el icono en la parte superior derecha de la página para construir.
Haga clic en el icono y aparecerá el siguiente cuadro de diálogo: introduzca la información de conexión y haga clic en el botón «Aceptar» para crear una conexión.
Autobús industrial#
La subpágina de bus industrial contiene principalmente cuatro subpestañas: Modbus TCP, Modbus RTU, Profinet, Ethernet/IP.
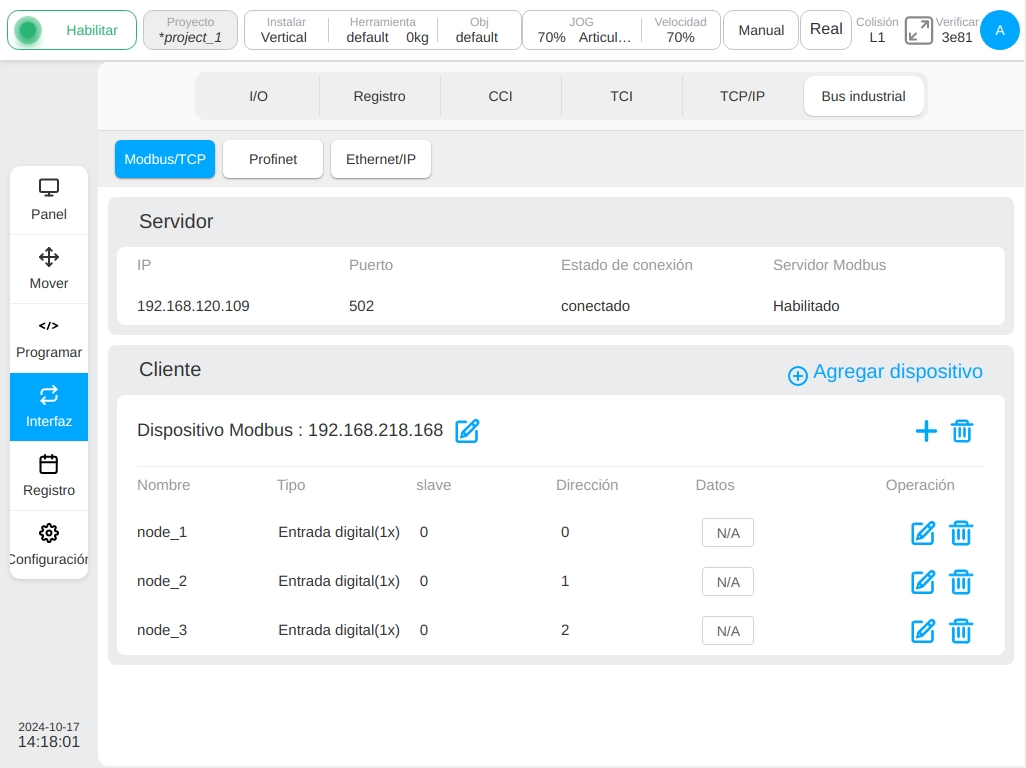
Usando la función Modbus TCP, el sistema del robot puede funcionar como un servidor Modbus para escuchar el comando del dispositivo cliente Modbus externo y monitorear el estado de la conexión cuando el robot está en estado de encendido. El valor del registro de direcciones Modbus de destino se operará en base al comando r/w del cliente Modbus. Como se muestra en la siguiente figura, se muestra la información de la conexión Modbus TCP y el funcionamiento factible:
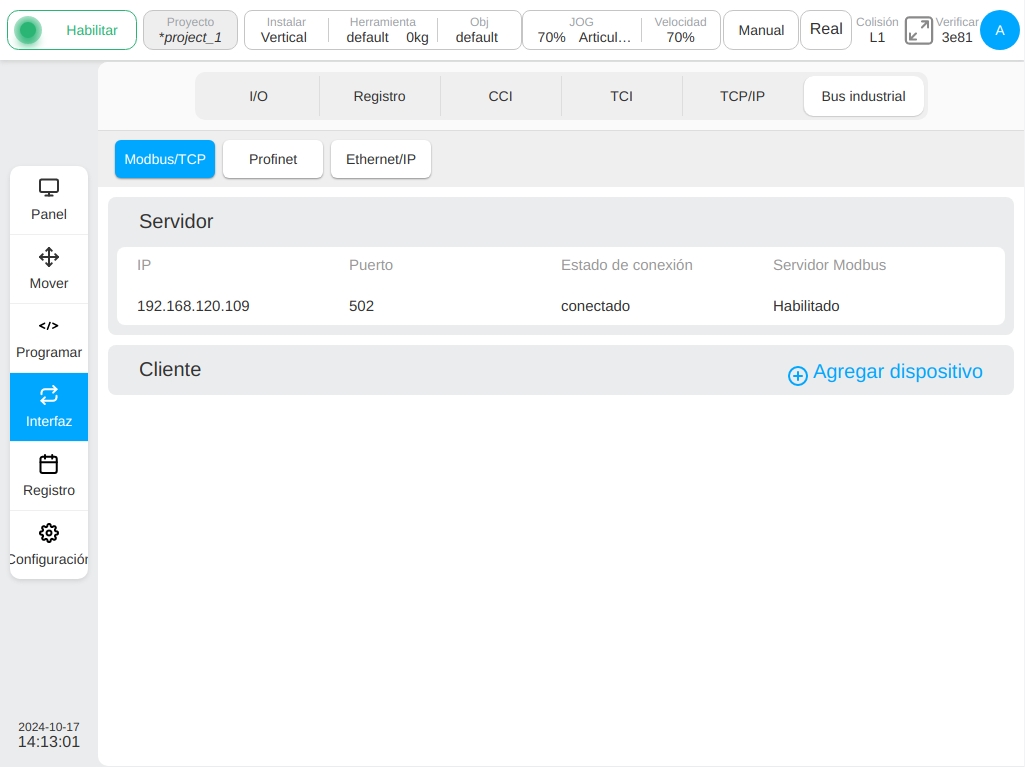
Usando la función Modbus TCP, el sistema del robot puede funcionar como un cliente Modbus para conectarse al dispositivo de servidor Modbus externo externo. Es capaz de operar el registro de direcciones Modbus de destino.
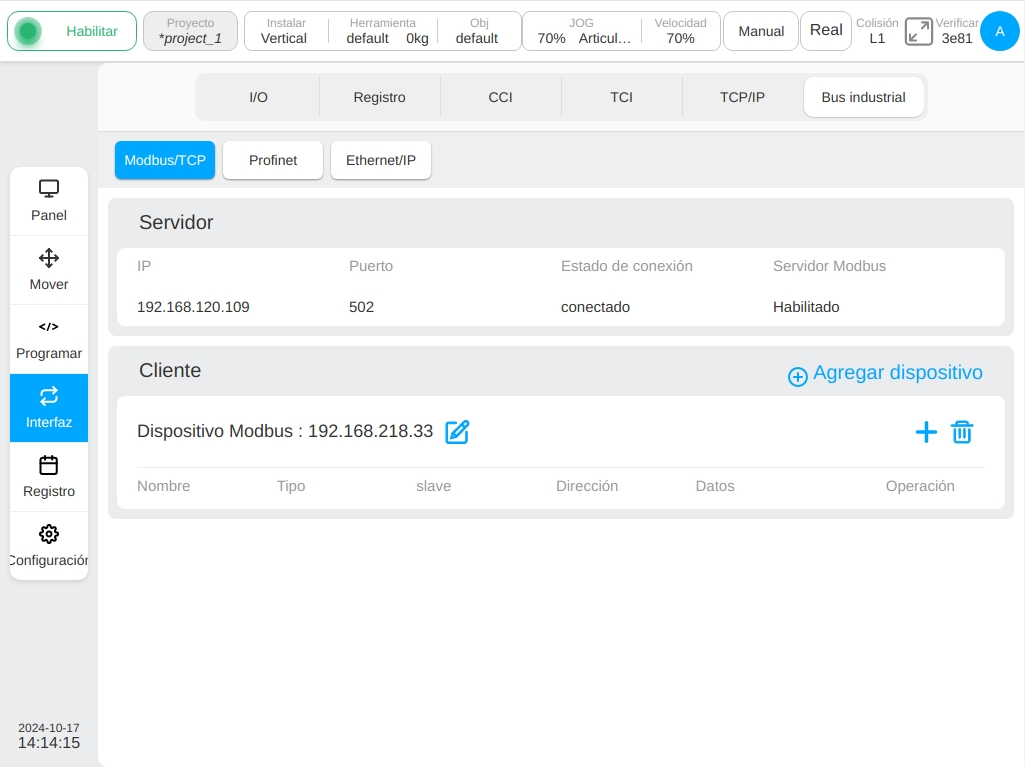
La dirección IP del sistema, el número de puerto y el estado de conexión del servidor Modbus se muestran en la parte superior de la interfaz. Haga clic en Añadir dispositivo. Se muestra el teclado común virtual. Introduzca la dirección IP del dispositivo cliente Modbus externo, por ejemplo, 192.168.218.163. La dirección IP del dispositivo Modbus y los ICONOS relacionados se muestran en la interfaz.
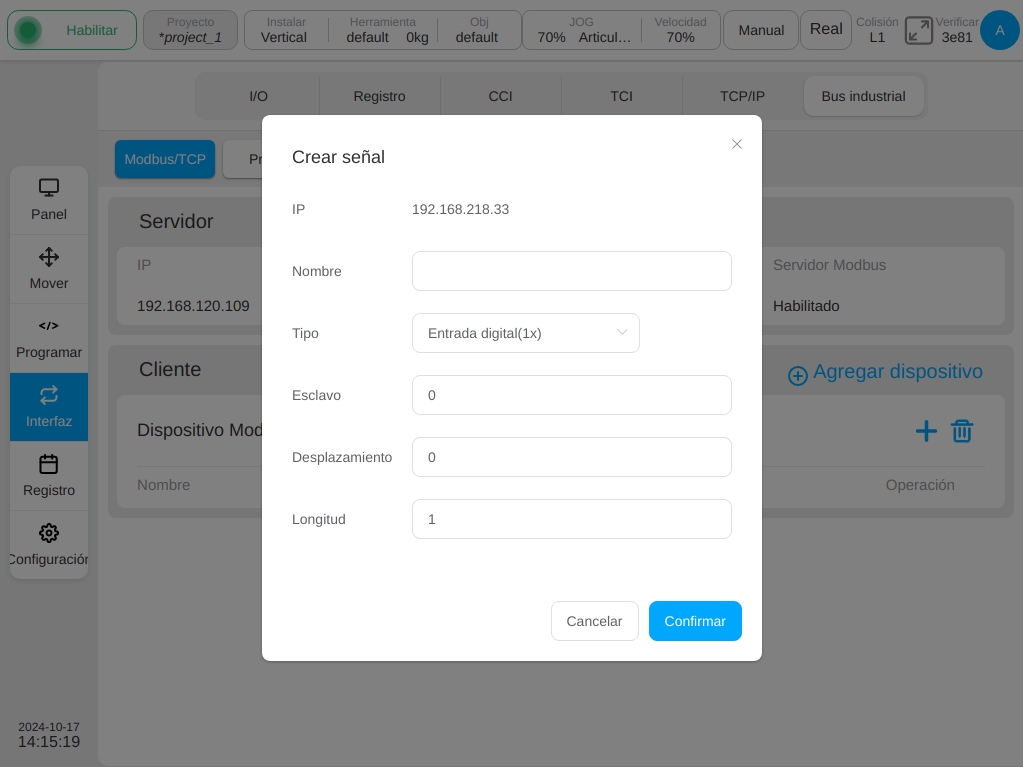
Haga clic en el icono  y aparecerá la ventana Nuevo nodo Modbus, como se muestra en la figura. Introduzca el nombre del nodo, el tipo de nodo, el número de esclavo, la dirección offset y la longitud,
y haga clic en el botón «OK» para confirmar. Hay cuatro tipos de nodo: bobina de sólo lectura(1x), bobina de lectura-escritura(0x), registro de sólo lectura(3x) y registro de lectura-escritura(4x).
y aparecerá la ventana Nuevo nodo Modbus, como se muestra en la figura. Introduzca el nombre del nodo, el tipo de nodo, el número de esclavo, la dirección offset y la longitud,
y haga clic en el botón «OK» para confirmar. Hay cuatro tipos de nodo: bobina de sólo lectura(1x), bobina de lectura-escritura(0x), registro de sólo lectura(3x) y registro de lectura-escritura(4x).
Al crear un nodo, la longitud es 1 por defecto. Cuando el valor de la longitud es 1, se crea un único nodo. Si la longitud es superior a 1, se crean varios nodos por lotes. Si la longitud se establece en 3, se añaden guiones bajos (_) a los nombres de los nodos según la longitud, es decir, nodo_1, nodo _2 y nodo _3, y las direcciones son 0, 1 y 2 en secuencia, como se muestra en la figura.
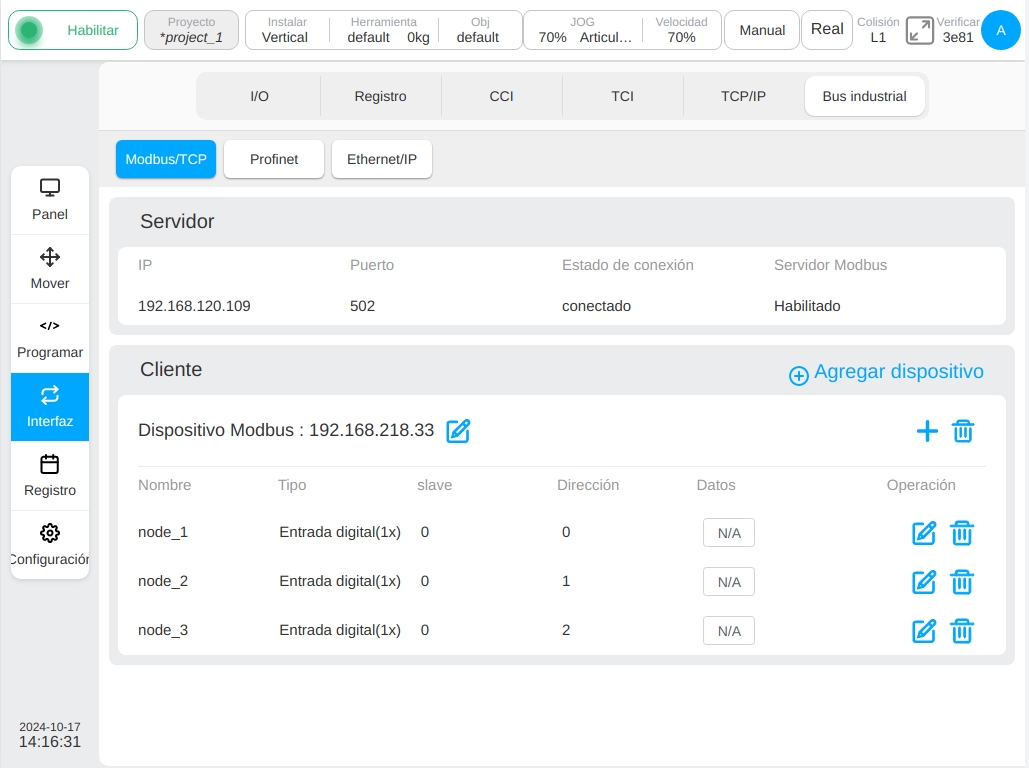
Después de crear un nuevo nodo, la información sobre el nodo recién definido se muestra en la interfaz. Si no hay datos en la columna de datos, se muestra N/A.
El usuario puede modificar o eliminar cada nodo. Haga clic en el botón  de la fila del nodo correspondiente, y la ventana emergente es similar a la que aparece cuando se crea un nodo nuevo,
excepto que el nombre del nodo no se puede cambiar, la longitud no se muestra, y el tipo de nodo, el número de esclavo y la dirección offset se pueden cambiar.
de la fila del nodo correspondiente, y la ventana emergente es similar a la que aparece cuando se crea un nodo nuevo,
excepto que el nombre del nodo no se puede cambiar, la longitud no se muestra, y el tipo de nodo, el número de esclavo y la dirección offset se pueden cambiar.
El usuario puede cambiar la dirección IP del dispositivo Modbus recién creado.Haga clic en el icono después de la dirección IP del dispositivo Modbus, Aparecerá el teclado común virtual,
Introduzca la dirección IP de destino, por ejemplo: 192.168.218.168. Después de pulsar el botón «OK», la interfaz se mostrará como sigue.
Después de modificar la dirección IP de un dispositivo Modbus, la información del nodo de la nueva dirección IP es la misma que antes de modificar la dirección IP.
Usando la función Modbus RTU, el sistema del robot puede funcionar como un esclavo Modbus a través de la interfaz del controlador 485 y la interfaz de la herramienta del robot 485 cuando el robot está en estado de encendido. El dispositivo maestro Modbus externo puede leer y escribir el registro a través de la dirección Modbus de destino.

Usando la función Modbus RTU, el sistema del robot puede funcionar como un maestro Modbus a través de la interfaz del controlador 485 o la interfaz de la herramienta del robot 485 y conectarse a dispositivos Modbus Slave externos cuando el robot está en estado de encendido. Es capaz de leer y escribir el registro del esclavo Modbus a través de la dirección Modbus. Todas las operaciones relacionadas, como agregar, eliminar, editar, etc., a los nodos Modbus, son completamente iguales a las de la función Modbus TCP.
Nota
Después de configurar y habilitar la interfaz del controlador 485 o la interfaz 485 de la herramienta robótica con el modo Modbus, no puede operar la interfaz 485 correspondiente directamente a través de los scripts y funciones relacionados, solo es factible realizar la operación de lectura y escritura en el registro Modbus a través de la dirección Modbus de destino mediante el uso de scripts y funciones relacionados con Modbus.

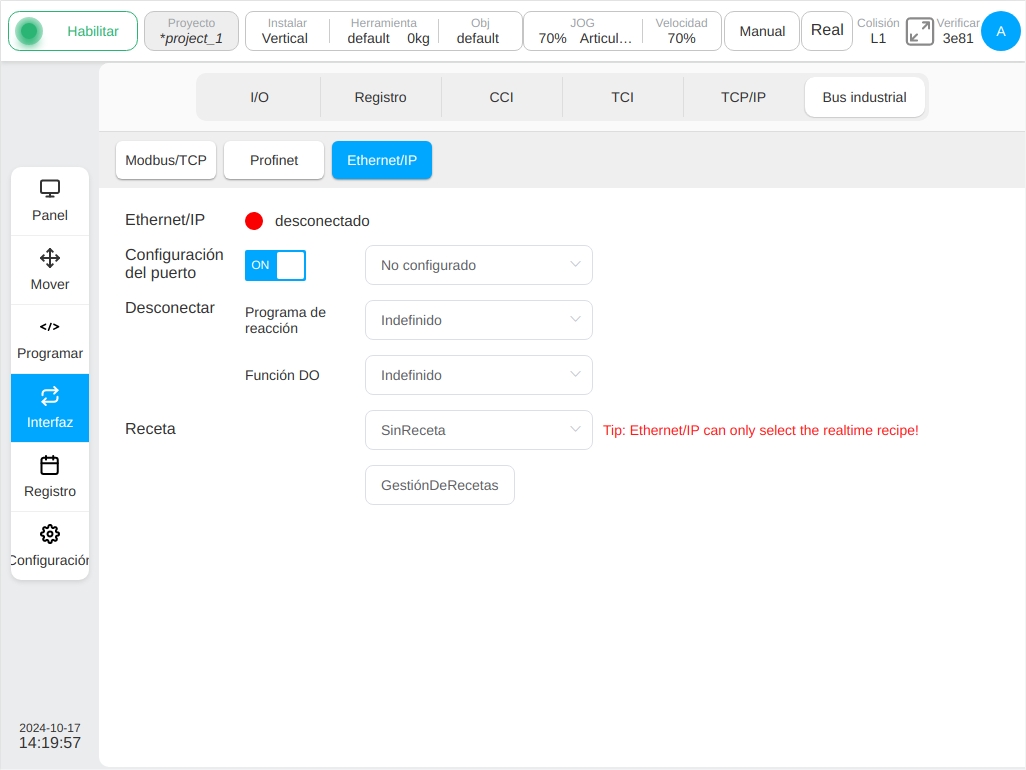
Las subpestañas Profinet y Ethernet/IP se utilizan principalmente para visualizar el estado de la conexión, la configuración de los puertos y la configuración del procesamiento de desconexión, incluyendo la acción de respuesta del programa y la correspondiente configuración de la salida de función IO. La configuración de puertos incluye la habilitación y configuración del nombre del puerto correspondiente. Las opciones del selector de respuesta del programa son: indefinido, programa en pausa, detener programa; Las opciones del selector de salida de la función DO incluyen: indefinido y nombres de señal de salida indefinidos en la señal de salida de la función en la subpágina de E/S. La función DO configurada para desconexión Profinet y Ethernet/IP en cada página de sub-etiqueta se sincroniza con la configuración de salida de función en la sub-página de E/S.
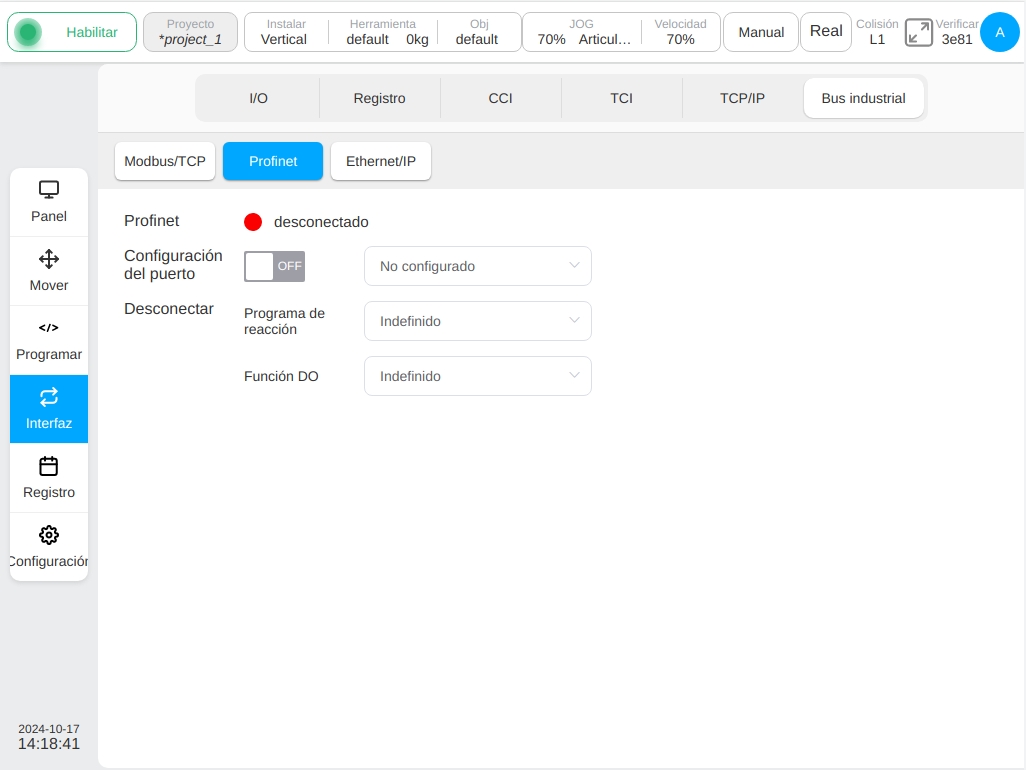
Además, la subpestaña Ethernet/IP también se puede utilizar para la configuración y la gestión de recetas, así como para los ajustes de modo grande y pequeño.
Nota
Nota: ¡Ethernet/IP sólo permite seleccionar recetas en tiempo real!