Página general#
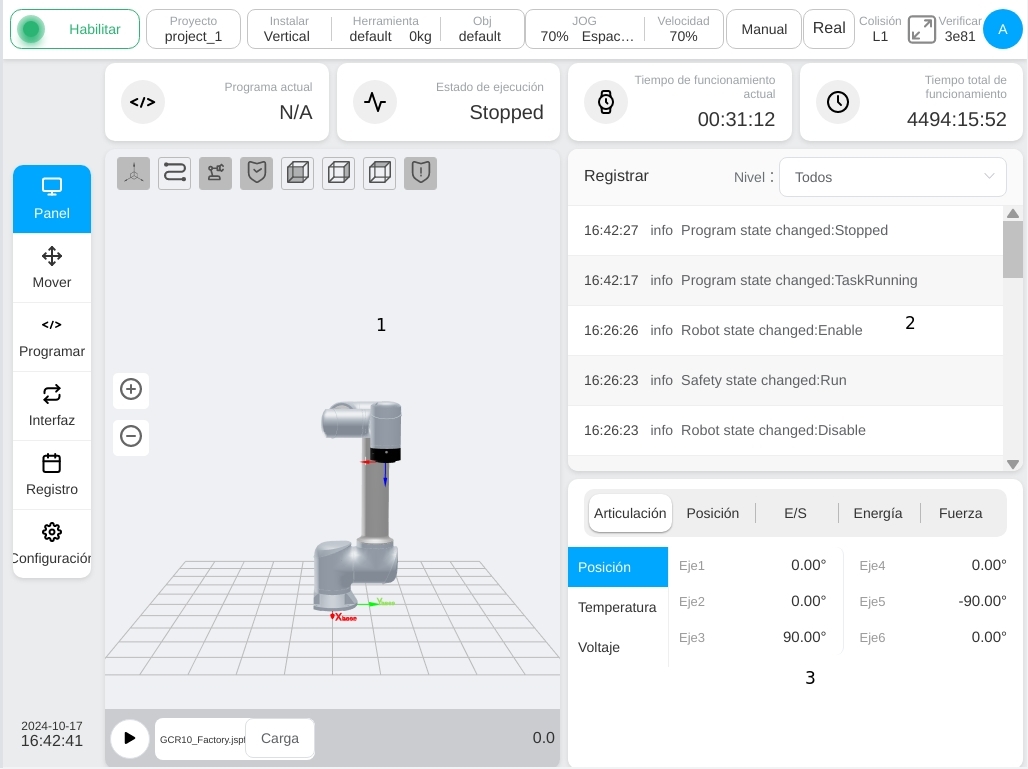
Al hacer clic en el botón «Visión general» de la barra de navegación, el usuario accede a la página de visión general, como se muestra en la figura. En la parte superior del área de contenido de la página, muestra: programa en ejecución actual, estado de ejecución del programa, tiempo de ejecución actual y tiempo de ejecución de toda la máquina. En la parte izquierda de la página, ① muestra el modelo de simulación 3D; en la parte superior derecha, ② muestra la información de registro, y el registro se puede ver seleccionando cinco niveles diferentes: Todos, Fatal, Error, Advertencia e Información a través del cuadro desplegable; en la parte inferior derecha, ③ muestra la información sobre las articulaciones del robot (posición/temperatura/tensión), la posición espacial (en el sistema de coordenadas base), el estado de las IOs, la información sobre la fuente de alimentación (en el armario de control) y la información de fuerza.
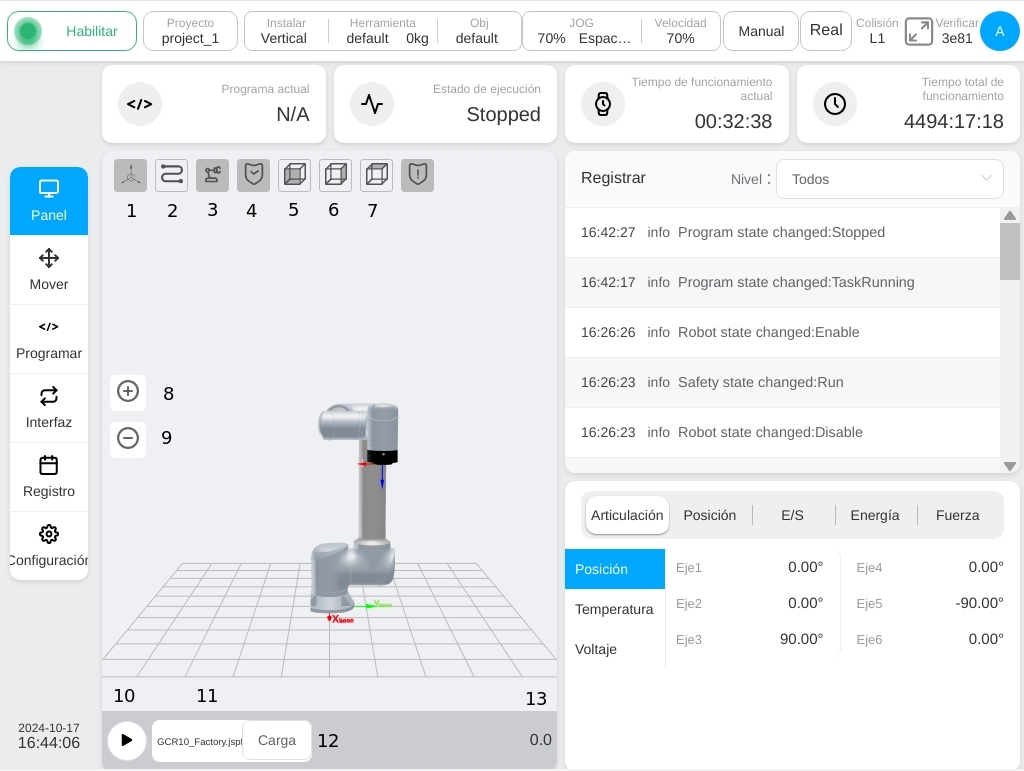
Área del modelo de simulación 3D como se muestra en la figura, los iconos ① - ⑦ de la parte superior izquierda indican si se desea visualizar: sistema de coordenadas de la pieza de trabajo y sistema de coordenadas de la herramienta, trayectoria final, modelo de simulación 3D del robot, zona de seguridad, vista frontal, vista derecha y vista superior. Los iconos ⑧ y ⑨ son botones para operar el zoom-in y zoom-out del modelo 3D, respectivamente. Los iconos ⑩ - ⑬ son el botón de ejecución del programa, el cuadro de visualización del programa actualmente en ejecución, el botón de carga del programa y la visualización del tiempo de ejecución del programa, respectivamente.
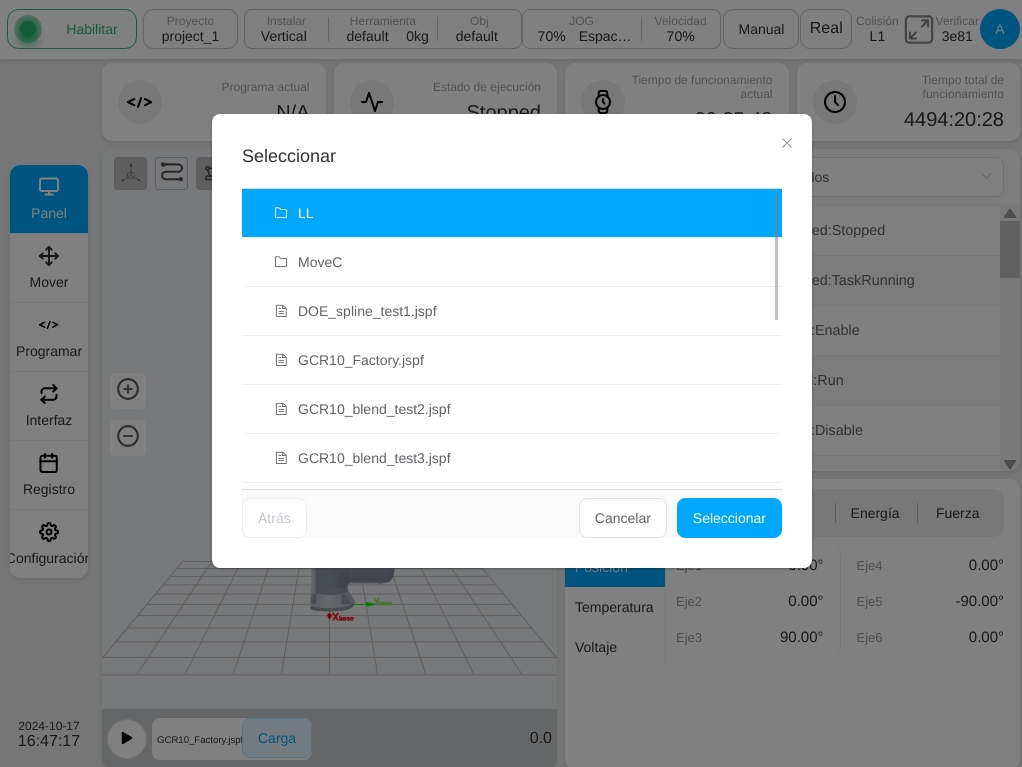
Haga clic en el botón «Cargar» y aparecerá la interfaz de la lista de programas, como se muestra en la figura. La lista de programas enumera todas las carpetas (por ejemplo, Test_1) y archivos de programa con la extensión.jspf (por ejemplo, ee.jspf). En la parte inferior de la pantalla hay tres botones: Volver a la capa superior, Cancelar y Seleccionar.
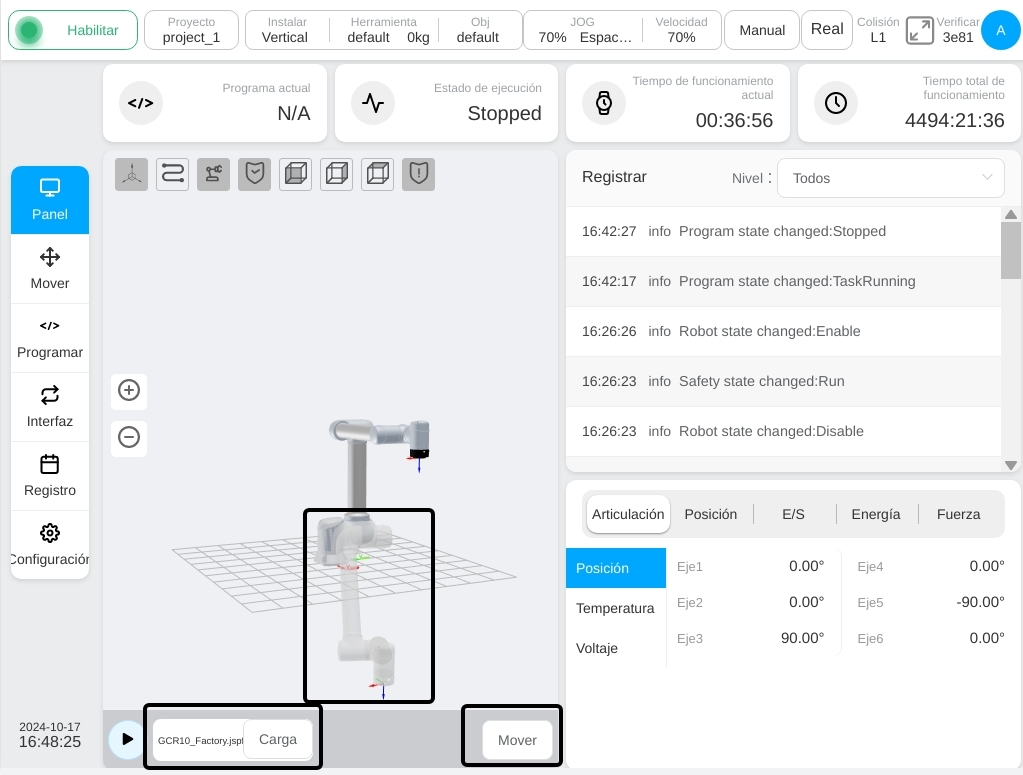
Seleccione el archivo de programa que necesita ser cargado y ejecutado, pulse el botón “Seleccionar” en la interfaz, la interfaz de la lista de programas desaparecerá automáticamente, mientras que la pantalla del icono mostrará el nombre de archivo del archivo de programa seleccionado o el nombre de archivo con “…/”. En el icono se mostrará el nombre del archivo del programa seleccionado o el nombre del archivo con “…/” (hay carpetas anidadas, por ejemplo, …/4560.jspf). Si el programa se inicia con un bloque de función «Inicio», pulsando el botón “Ejecutar” con el botón “Mantener para Mover” aparecerá el modelo 3D en perspectiva gris (denominado colectivamente modelo 3D gris), como se muestra en la figura. Manteniendo pulsado el botón “Mantener Mover” se moverá el robot a la posición inicial establecida en el programa, es decir, el modelo 3D de perspectiva gris, durante el proceso soltando el botón se detendrá el movimiento. Cuando el robot se mueve al modelo 3D en gris, el botón “Presionar y Mantener Mover” desaparece. En este punto, vuelve a pulsar el botón “Ejecutar” para ejecutar el programa.