DC00-J9控制器#
DC00控制器内置于DC30D/15S内,提供机器人系统的算法实现、运动控制、人机交互等功能,外设接口提供外部通讯、IO等功能。DC00控制器可作为控制单元独立选用(具体请见DC00控制器独立使用说明)。
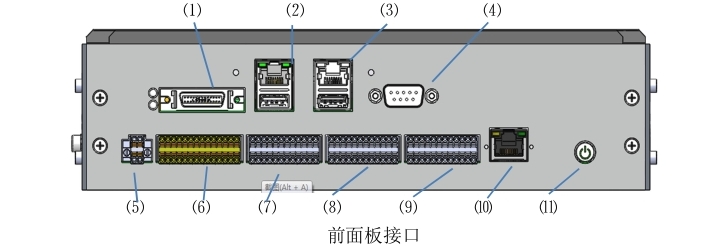
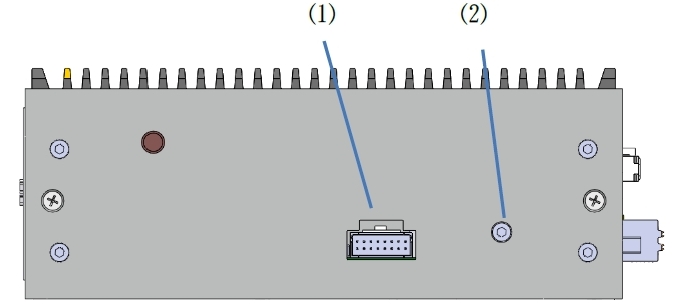
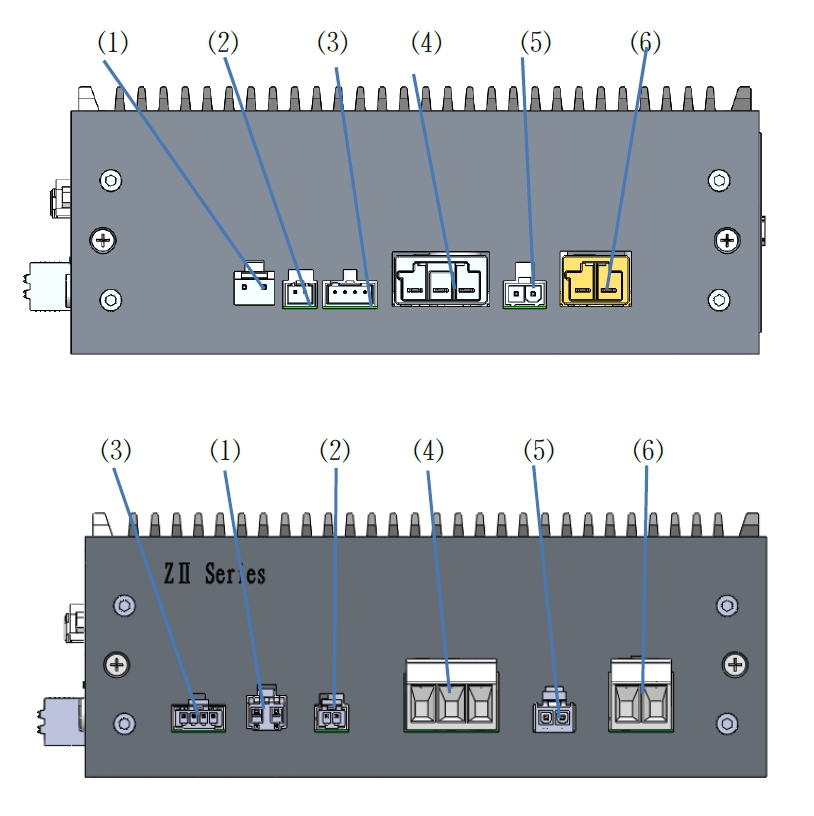
DC00控制器外观样式如图5所示,接口图及接口说明如图6:
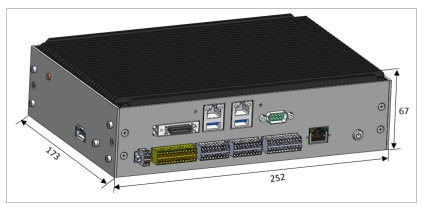
图5 DC00控制器外观图
序号 |
接口名称 |
序号 |
接口名称 |
|---|---|---|---|
1 |
VGA&COM3/4 |
2 |
LAN1+USB3.0 |
3 |
LAN2+USB2.0 |
4 |
COM1 |
5 |
IO POWER(IO供电) |
6 |
SIO(安全IO) |
7 |
DIO(数字IO) |
8 |
CIO(可配置IO) |
9 |
EIO(功能拓展IO) |
10 |
EtherCAT2 |
11 |
ON/OFF(开关机) |
序号 |
接口名称 |
序号 |
接口名称 |
|---|---|---|---|
1 |
TP(示教器IO) |
2 |
接地 |
序号 |
接口名称 |
序号 |
接口名称 |
|---|---|---|---|
1 |
24V_INPUT |
2 |
FAN(风扇) |
3 |
EtherCAT1 |
4 |
48V_OUTPUT |
5 |
TR(制动电阻) |
6 |
48V_INPUT |
图6 DC00控制器接口图(面板版本请以实物为准)
TP接口#
TP(示教器IO)接口用于与示教器接线盒交互示教器急停,使能,模式选择,带灯开关机按钮的信号。其接口定义如表9所示:
表9 TP接口定义

注意:此接口在使用时必须接线;在WI-FI模式下需要接急停按钮盒线束;在示教器模式下需要接示教器线束;否则会触发急停。
接地接口#
此接口接PE线,用于消除壳体的静电,保护设备以及人身安全。
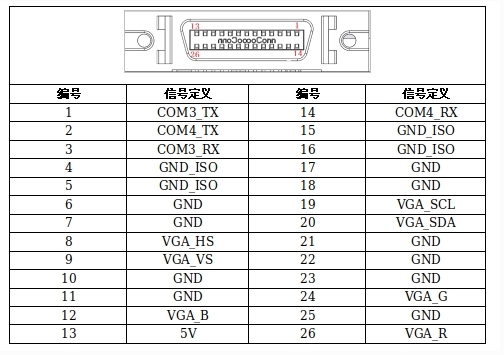
VGA&COM3、4接口#
VGA&COM3/4接口用于与示教器接线盒示教器画面显示以及示教器操作的信号。其接口定义如表10所示:
表10 示教器VGA+232接口定义
LAN1+USB3.0接口#
LAN1接口,1000M,支持PROFINET/MODBUS TCP/ TCP IP通讯,用于与其它控制器和机器人通信实现机器人的控制;标准网线接口,不再陈列接口定义;
USB3.0接口用于连接鼠标键盘等设备,以及方便技术人员连接U盘设备,进行软件拷贝。标准USB3.0接口,不再陈列接口定义;
LAN2+USB2.0接口#
LAN2接口,1000M,支持MODBUS TCP /TCP IP通讯,用于与其它控制器和机器人通信实现机器人的控制;标准网线接口,不再陈列接口定义;
USB2.0接口用于连接鼠标键盘等设备,以及方便技术人员连接U盘设备,进行软件拷贝。标准USB2.0接口,不再陈列接口定义;

COM1接口#
COM1接口为RS232接口;
此接口为DB9母头公针连接器;其接口定义如表11所示:
表11 COM1接口定义

编号 |
信号定义 |
编号 |
信号定义 |
|---|---|---|---|
1 |
NC |
2 |
COM1_RX |
3 |
COM1_TX |
4 |
NC |
5 |
GND_ISO |
6 |
NC |
7 |
NC |
8 |
NC |
9 |
NC |
IO POWER接口#
IO POWER(IO供电)接口用于SIO(安全IO)、DIO(数字IO),CIO(可配置IO)接口及内部电路的供电。其接口定义如表12所示:
此处线束建议使用22AWG(0.2-0.3²)及以下,长度8MM的管型端子
表12 IO POWER接口定义
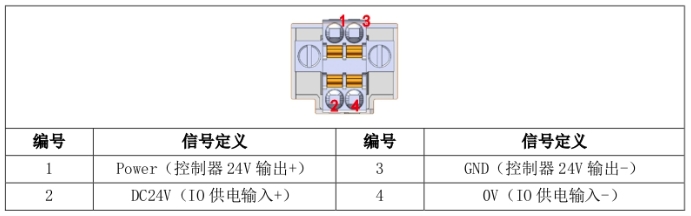
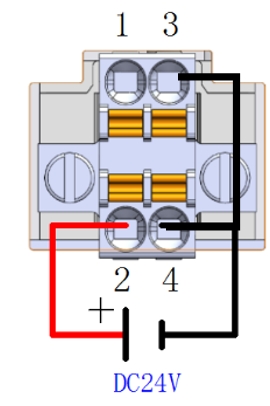
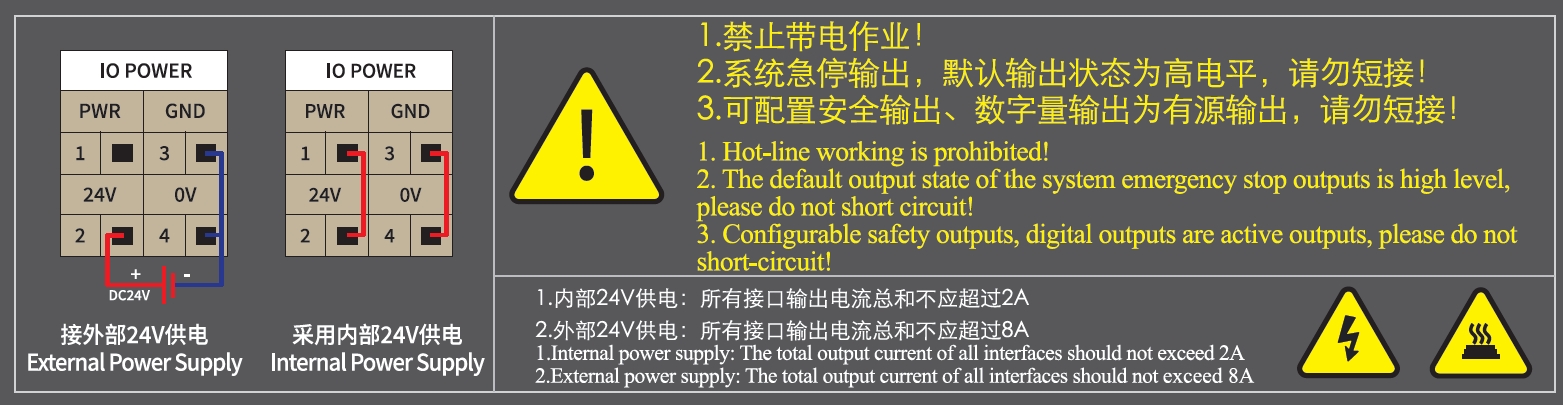
说明:根据IO负载功率的情况,可以选择使用内部供电以及外部供电的两种供电方式
内部供电时,将1号脚与2号脚短接,3号脚与4号短接;此时内部将提供最大2A的24V直流电(如图)
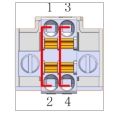
外部供电时,拆除短接线,将2号脚接入外部电源DC24V,将4号脚接入外部电源0V;并且将3号脚与4号短接后共地,供电后外部电源的0V即和系统的48V电源地相连。注意,如果使用的外部电源的0V和外部电源的外壳短路的电源,安装时外壳不能和系统的外壳(PE)相连接。外部供电时,最高承载8A的24V直流电(如图)
SIO接口#
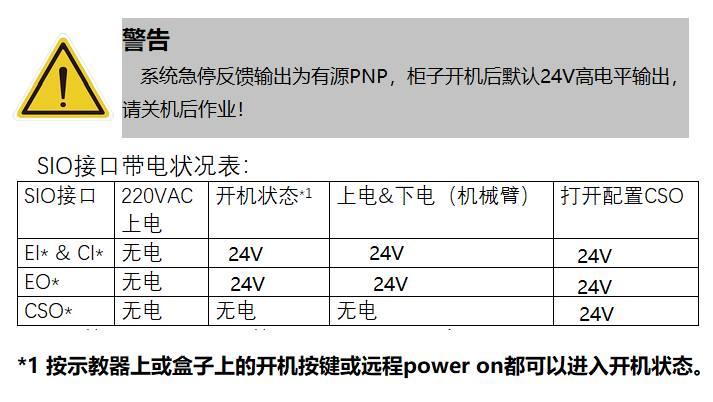
SIO(安全IO)接口是控制器提供的外部急停及安全输入输出接口,包括1路用户急停信号输入、1路系统急停反馈输出、1路保护性停止输入、2路可配置安全输入、2路可配置安全输出(安全输入输出都为有源信号)。 其中急停型号输入,保护性停止输入以及可配置安全输入为干接点接口; 在使用可配置安全输出和系统急停反馈输出时,建议使用固态继电器进行转接,强烈推荐为感性小型继电器使用二极管保护。 注意:系统急停反馈输出 默认为高电平有源输出,接线请注意关机后作业!切勿带电作业! 其它接口通过软件设置此接口的操作说明,请查看Duco core用户手册。其接口定义如表13所示:
表13 SIO接口定义

编号 |
信号定义 |
编号 |
信号定义 |
|---|---|---|---|
1 |
EI1+ (用户急停信号输入1+) |
2 |
EI1- (用户急停信号输入1-) |
3 |
EI2+ (用户急停信号输入2+) |
4 |
EI2- (用户急停信号输入2-) |
5 |
PS1+ (保护性停止输入1+) |
6 |
PS1- (保护性停止输入1-) |
7 |
PS2+ (保护性停止输入2+) |
8 |
PS2- (保护性停止输入2-) |
9 |
CI1_1+ [可配置安全输入1(1+)] |
10 |
CI1_1- [可配置安全输入1(1-)] |
11 |
CI1_2+ [可配置安全输入1(2+)] |
12 |
CI1_2- [可配置安全输入1(2-)] |
13 |
CI2_1+ [可配置安全输入2(1+)] |
14 |
CI2_1- [可配置安全输入2(1-)] |
15 |
CI2_2+ [可配置安全输入2(2+)] |
16 |
CI2_2- [可配置安全输入2(2-)] |
17 |
EO1+(系统急停反馈输出1+) (默认有24V输出) |
18 |
EO1-(系统急停反馈输出1-) |
19 |
EO2+ (系统急停反馈输出2+) (默认有24V输出) |
20 |
EO2-(系统急停反馈输出2-) |
21 |
CSO1_1+[可配置安全输出1(1+)] |
22 |
CSO1_1-[可配置安全输出1(1-)] |
23 |
CSO1_2+[可配置安全输出1(2+)] |
24 |
CSO1_2-[可配置安全输出1(2-)] |
25 |
CSO2_1+[可配置安全输出2(1+)] |
26 |
CSO2_1-[可配置安全输出2(1-)] |
27 |
CSO2_2+[可配置安全输出2(2+)] |
28 |
CSO2_2-[可配置安全输出2(2-)] |
此处线束建议使用22AWG(0.2-0.3²)及以下,长度8MM的管型端子
安全IO接口电气参数如表14所示:
表14 安全IO接口参数表(PNP型)
安全DI |
||||
终端 |
参数 |
|||
EIx |
干接点输入 |
|||
PSIx |
干接点输入 |
|||
CSIx |
干接点输入 |
|||
安全DO |
||||
终端 |
参数 |
最小值 |
典型值 |
最大值 |
EOx/CSOx |
电流 |
0A |
— |
0.2A |
电压 |
23.52V |
24V |
25.2V |
|
信号类型 |
PNP |
|||
安全DI时序图如图8 所示:
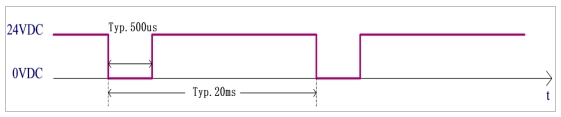
图8 安全输入时序图
安全DI输入端诊断脉冲如图7所示。MCU通过发送诊断脉冲来检验硬件电路是否失效,诊断脉冲周期20ms,负脉宽500(±100)μs。
安全DO时序如图9 所示:
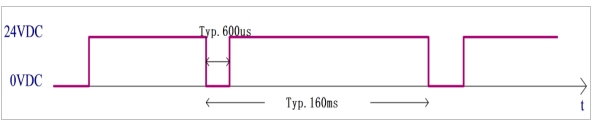
图9 安全输出时序图
安全DO输出的输出端诊断脉冲如图8所示。MCU发送输出控制信号带有诊断脉冲信号,诊断脉冲周期为160ms,负脉宽600(±100)μs。
SIO接口接线图#
a 默认安全配置
图10 为安全接口默认配置接线图,可在没有任何附加安全设备的情况下进行机器人操作。
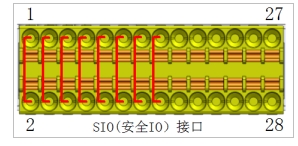
图10 默认安全配置接线图
d 连接外部安全输入信号
图11 为安全输入接口连接外部安全输入信号接线图,注意外部安全输入信号为干接点信号,外部安全输入信号以急停按钮为例。
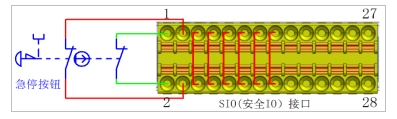
图11 外部安全信号输入接线图
e 连接防护性停止信号
图12 为防护性停止输入信号接线图,注意外部防护性停止输入信号为干接点信号。
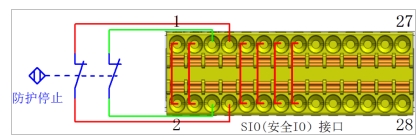
图12 防护性停止信号输入接线图
f 连接可配置安全输入信号
可配置安全输入信号接线图与防护性停止输入信号接线类似。
g 与其他机器共享紧急停止
机器人与其他机器搭配使用时,往往需要设置一个公共的紧急停止电路。通过设置一条公共线路,操作员就不必思考要使用哪一个紧急停止按钮。
由于这两台机器都需要等待彼此跳出紧急停止条件,因此标准机器人紧急停止输入不能用于共享,要与其他机器共享紧急停止功能,必须通过控制器安全IO的安全输入和安全输出来配置。
另外安全输出为有源信号,需接固态继电器转接后使用,如图13 所示:
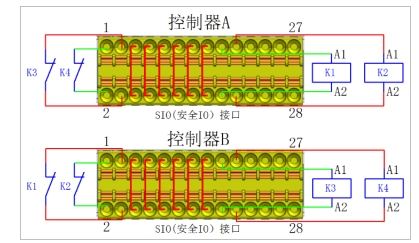
图13 两台机器人控制器紧急停止级联示意图
DIO接口#
控制器提供的DIO(数字IO)接口,包括8路数字量输入(DI)接口、8路数字量输出(DO)接口,其接口定义如表15所示:
此处线束建议使用22AWG(0.2-0.3²)及以下,长度8MM的管型端子;
表15 DIO接口定义

编号 |
信号定义 |
编号 |
信号定义 |
|---|---|---|---|
1 |
24V |
2 |
0V |
3 |
24V |
4 |
0V |
5 |
DI1(普通DI输入1) |
6 |
DO1(普通DO输出1) |
7 |
DI2(普通DI输入2) |
8 |
DO2(普通DO输出2) |
9 |
DI3(普通DI输入3) |
10 |
DO3(普通DO输出3) |
11 |
DI4(普通DI输入4) |
12 |
DO4(普通DO输出4) |
13 |
DI5(普通DI输入5) |
14 |
DO5(普通DO输出5) |
15 |
DI6(普通DI输入6) |
16 |
DO6(普通DO输出6) |
17 |
DI7(普通DI输入7) |
18 |
DO7(普通DO输出7) |
19 |
DI8(普通DI输入8) |
20 |
DO8(普通DO输出8) |
21 |
24V |
22 |
0V |
23 |
24V |
24 |
0V |
数字输入(DI)#
控制器提供的数字输入(DI)接口,其输入电压范围为:-3-30VDC(0~15mA),接口电气参数如表16所示:
表16 DI接口参数表(PNP型)
终端 |
参数 |
最小值 |
典型值 |
最大值 |
数字输入 |
||||
DIX-24V |
电压 |
-3V |
—— |
30V |
DIX-24V |
ON区域 |
11V |
—— |
30V |
DIX-24V |
OFF区域 |
-3V |
—— |
5V |
DIX-24V |
TON/TOFF延迟 |
TON:50ms TOFF: 50ms |
||
DIX-24V |
功能 |
PNP型 |
||
a 干接点信号输入
图14 为干接点信号(按钮)与DI口的接线方式。
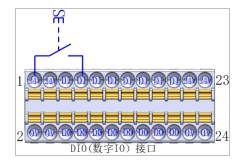
图14 干接点信号输入接线图
h PNP信号输入
图15 为PNP信号(PLC的DO口输出,PNP型)输入与DI口的接线方式。
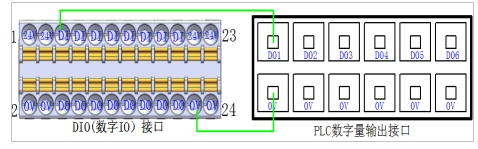
图15 PNP信号输入接线图
数字输出(DO)#
控制器提供的数字输出(DO)接口,其输出电压范围为:23.52-25.2VDC,最大电流为:0.5A,开关时间:接口电气参数如表17所示:
表17 DO接口参数表(PNP型)
终端 |
参数 |
最小值 |
典型值 |
最大值 |
数字输入 |
||||
DOX-0V |
电流 |
0A |
—— |
0.5A |
DOX-0V |
电压 |
23.52V |
—— |
25.2V |
DOX-0V |
TON/TOFF延迟 |
TON:50ms TOFF: 50ms |
||
DOX-0V |
功能 |
PNP型 |
||
a DO输出连接负载
图16 为DO输出直接连接负载(继电器)的接线图,输出最大电流0.5A。
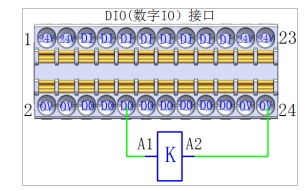
图16 DO输出与负载参考接线图
i DO输出与其它PNP输入设备接线图
图17 为DO口输出与其它PNP型DI输入设备(PLC)之间的接线图:
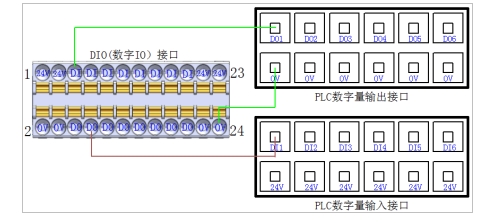
图17 与其他PNP型DI输入设备接线图
CIO接口#
控制器提供的CIO(可配置数字IO)接口,包括8路可配置数字输入(DI)接口、8路可配置数字输出(DO)接口;通过软件操作可将此接口配置成用户DIO或功能DIO,默认设置为用户DIO;其接口定义如表18所示:
此处线束建议使用22AWG(0.2-0.3²)及以下,长度8MM的管型端子;
表18 可配置数字IO接口定义

编号 |
信号定义 |
编号 |
信号定义 |
|---|---|---|---|
1 |
24V |
2 |
0V |
3 |
24V |
4 |
0V |
5 |
CDI1 (可配置DI输入1) |
6 |
CDO1 (可配置DO输出1) |
7 |
CDI2 (可配置DI输入2) |
8 |
CDO2 (可配置DO输出2) |
9 |
CDI3 (可配置DI输入3) |
10 |
CDO3 (可配置DO输出3) |
11 |
CDI4 (可配置DI输入4) |
12 |
CDO4 (可配置DO输出4) |
13 |
CDI5 (可配置DI输入5) |
14 |
CDO5(可配置DO输出5) |
15 |
CDI6 (可配置DI输入6) |
16 |
CDO6 (可配置DO输出6) |
17 |
CDI7 (可配置DI输入7) |
18 |
CDO7 (可配置DO输出7) |
19 |
CDI8 (可配置DI输入8) |
20 |
CDO8 (可配置DO输出8) |
21 |
24V |
22 |
0V |
23 |
24V |
24 |
0V |
备注:通过软件设置此接口配置成用户DIO或功能DIO的操作说明,请查看Duco core用户手册
可配置数字输入(CDI)#
控制器提供的可配置数字输入(CDI)接口,其输入电压范围为:-3-30VDC(0~15mA)。 接口参数表,时序图,接线方式请参考4.10.1数字输入(DI)的章节说明;
可配置数字输出(CDO)#
控制器提供的可配置数字输出(CD0)接口,其输出电压范围为:23.52-25.2VDC,最大电流为:0.5A。 接口参数表,时序图,接线方式请参考4.10.2数字输出(D0)的章节说明;
EIO接口#
DC00控制器的EIO(功能扩展IO)接口,是控制器为外部提供的2路电压模拟量输入接口、2路电压模拟量输出接口、1路外部CAN通讯接口、一路外部RS485通讯接口、INC编码器差分信号接口、以及一路远程上下点接口。其接口定义如表19所示:
此处线束建议使用22AWG(0.2-0.3²)及以下,长度8MM的管型端子;
注意:INC编码器的24V供电在发生短路时,有可能会造成从站接口板的损坏,使用过程中避免发生短路。
表19 功能拓展1接口定义

编号 |
信号定义 |
编号 |
信号定义 |
|---|---|---|---|
1 |
AI1 (电压模拟量输入1) |
2 |
AG(模拟地) |
3 |
AI2 (电压模拟量输入2) |
4 |
AG(模拟地 |
5 |
AO1 (电压模拟量输出1) |
6 |
AG(模拟地) |
7 |
AO2 (电压模拟量输出2) |
8 |
AG(模拟地) |
9 |
24VE |
10 |
RC1(远程开关ON+) |
11 |
GND |
12 |
PowerON(远程开关ON-) |
13 |
A+ (INC信号A相+) |
14 |
RC2(远程开关OFF+) |
15 |
A- (INC信号A相-) |
16 |
Power0FF(远程开关OFF-) |
17 |
A- (INC信号A相-) |
18 |
CAN_L |
19 |
B- (INC信号B相-) |
20 |
CAN_H |
21 |
Z+ (INC信号C相+) |
22 |
485_B |
23 |
Z- (INC信号C相-) |
24 |
485_A |
电压模拟量接口#
电压模拟量输入(0~10V ±1%)
电压模拟量输入出厂默认0-10V电压输入(精度 ±1%);
电压模拟量输出(0~10V,±1%)
电压模拟量输出出厂默认0V电压输出;
模拟量信号隔离规范
模拟量信号相互之间电气隔离,电气规范参照表20所示:
表20 模拟量电气规范
终端 |
参数 |
最小值 |
典型值 |
最大值 |
电压模拟输入 |
||||
AI_VX-AGND |
电压 |
0V±1% |
—— |
10V±1% |
电阻 |
— |
48kΩ |
— |
|
分辨率 |
— |
12位 |
— |
|
l 模拟量接线示意图
图18 为模拟量接口接线示意图:
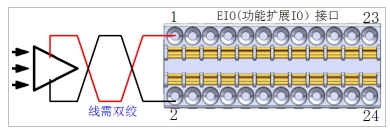
图18 模拟量输入接线示意图
通讯接口(CAN,RS485,INC信号)#
外部通讯接口相互之间信号隔离,通讯参数规范参照表21所示:
表21 通讯参数规范
终端 |
参数 |
数据 |
CAN通讯 |
波特率 |
10k、 20k、50k 、100k 、125k、250k、 500k、1000k bps |
RS485通讯 |
波特率 |
4800、 9600、 19200 、38400 、115200 bps |
线路阻抗 |
120Ω |
|
INC编码器通讯A+,A-;B+,B-;Z+,Z- |
供电电压 |
24VDC |
允许频率 |
<200KHz |
|
输入信号 |
方波信号(兼容单端/差分) |
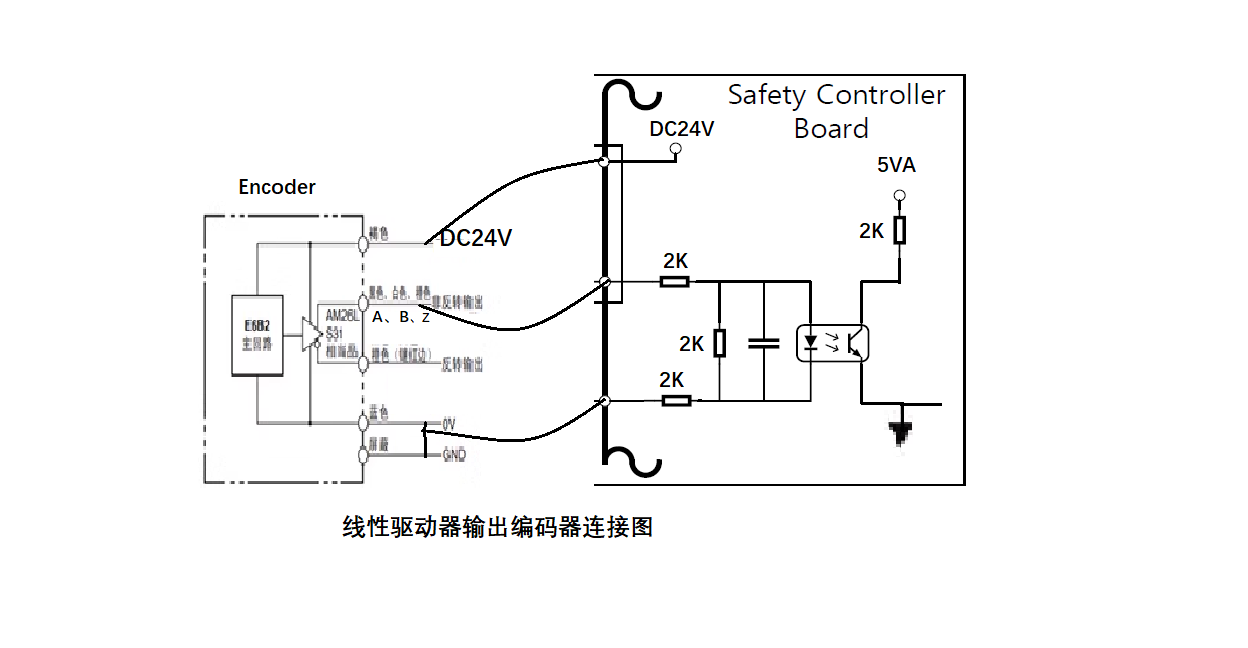
图19 为INC接口差分编码器接线示意图:
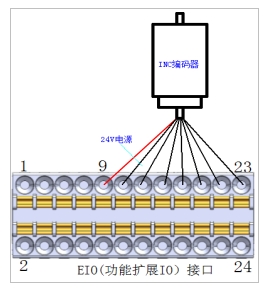
图19 差分INC编码器接线示意图
图20 为INC接口单端编码器接线示意图:
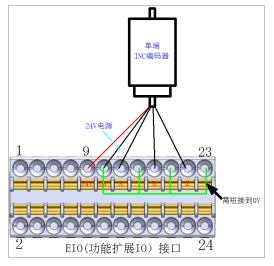
图20 单端INC编码器接线示意图
控制器内部设计如下图:推荐使用线性驱动器输出编码器的接线方式。如果使用PNP、NPN等输出编码器,如有不兼容可使用编码器脉冲信号转换分配器。
远程开关接口#
利用远程开关,可在不使用示教器或控制器面板上的上电按钮的情况下开启或关闭系统。
“PowerON”输入与上电按钮原理相同,务必对远程关闭使用“PowerOFF”输入,此信号允许控制器保存打开的文件并正常关闭(类似系统软关机)。
远程开关接口定义如表22所示:
表22 远程开关接口定义
接插件编号 |
信号定义 |
输入信号类型 |
10 |
RC1 |
干接点 |
12 |
PowerON |
|
14 |
RC2 |
干接点 |
16 |
PowerOFF |
电气规范如表23所示如下:
表23 远程开关接口电气规范
终端 |
参数 |
最小值 |
最大值 |
PowerON-RC1 |
电压 |
0VDC |
25.2VDC |
PowerOFF -RC2 |
电压 |
0VDC |
25.2VDC |
PowerON激活时间 |
>1S |
||
PowerOFF关断时间 |
>3S |
||
远程开关的接线方法如下:
a 远程PowerON接口(干接点输入)
图21 是远程PowerON按钮的接线方法,其中按钮使用自复位按钮。
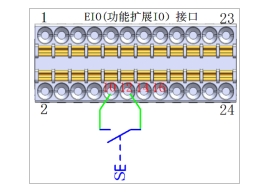
图21 远程上电接线示意图
m 远程PowerOFF接口(干接点输入)
图22 是远程PowerOFF按钮的接线方法,其中按钮使用自复位按钮。
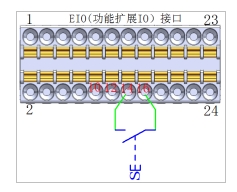
图22 远程下电接线示意图
EtherCAT2接口#
EtherCAT2接口,支持EtherCAT通讯;预留备用;标准网线接口,不再陈列接口定义;

ON、OFF按钮#
DC00控制器上电按钮为微动带灯(绿)复位按钮。当系统开关处于ON状态,且系统未启动时,轻按上电按钮(维持1S以上)后松开,按钮灯亮系统正常启动,可正常工作。当需关闭系统时使用示教器界面进行正常断电以及关机操作,如遇到系统问题时,可以长按此按钮3秒以上,强制进行系统断电处理(主控制器数据正常保存)。
24V_INPUT接口#
24V_INPUT接口是48V转24V隔离模块提供的电源DC24V,除了给DC00控制器的MCU端主控制器供电外,还经MCU控制后分别给RC(内部接口),IO接口,TP示教器,风扇供电。其接口定义如表24所示:
表24 24V_INPUT接口定义

编号 |
信号定义 |
编号 |
信号定义 |
1 |
+(DC24V) |
2 |
- (GND) |
FAN接口#
FAN(风扇)接口是用于给直流风扇驱动电流(无变频);此端口输出电压为DC24V,输出电流最大为2A,建议使用功率为5~10W的直流风扇;其接口定义如表25所示:
表25 风扇接口定义

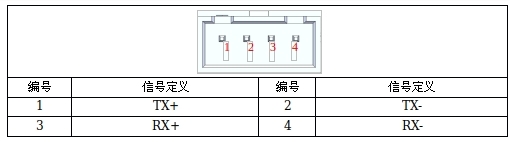
EtherCAT 1接口#
EtherCAT 1接口专用于与机械臂进行通讯交互;其接口定义如表26所示:
表26 Ecat OUT1接口定义
48V_OUTPUT接口#
48V_OUTPUT接口专用于给机械臂提供DC48V动力,其接口定义如表27所示:
表27 DC48V输出接口定义
TR接口#
TR接口连接制动电阻;当电机的出力矩和转速的方向相反时,它代表能量从负载端传回至驱动器内。此能量回灌使得其电压值往上升。当上升到某一值时,回灌的能量只能靠制动电阻来消耗。其接口定义如表28所示:
标配的制动电阻为150W,3Ω。
表28 制动电阻接口定义

编号 |
信号定义 |
编号 |
信号定义 |
1 |
R+ |
2 |
R- |
48V_INPUT接口#
48V_INPUT接口专用于给机械臂提供DC48V动力;其接口定义如表29所示:
表29 DC48V输入接口定义
24V模块接口#
24V模块接口说明如表32所示:
表30 24V模块接口定义。
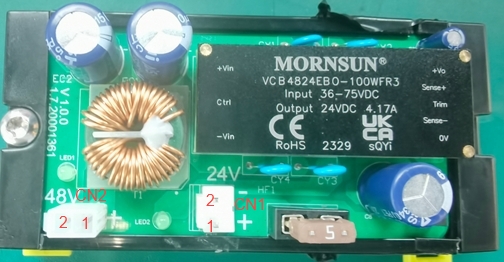
HF1 为可插拔替换的保险丝(32V,5A,推荐型号littefuse 0297005.U),如因带电作业或意外短路造成保险丝故障,请联系售后维修。