产品说明#
机器人系统概览#
协作机器人系统主要由以下部分组成:
机器人本体
机器人控制柜
连接线缆
软件
其他选配件,附件
机器人本体说明#
机器人本体概述#
协作机器人由底座、6个模块化设计的关节构成,具备牵引示教、碰撞检测等功能,机器人可任意方向安装,机器人每个关节配有编码器检测关节运行位置,并配有可靠的制动系统用于停止。
机器人本体主要由以下部分组成:

底座模块 ①
底座模块处于机器人底端,机器人线缆通过底座模块接口板与控制柜连接,为机器人进行供电及数据传输。
关节模块 ②
每个机器人由6个关节联接而成,内置独立驱动模块,外壳是铝合金铸件。
电气系统
电气系统由为各关节电机进行供电和控制的所有电气元器件组成(包括驱动器、连接器、线缆等)。
机器人关节坐标#
机器人关节坐标示意图如下:

图 3‑12机器人关节坐标示意图
机器人零位及正方向#
机器人零位及正方向如下:

图 3‑13机器人零位及机器人正方向
底座输入面板说明#
底座输入面板位于机器人底端,含一个通信供电接口,用于连接盘间线缆,为机器人进行供电、数据传输。
机器臂接口定义如下:

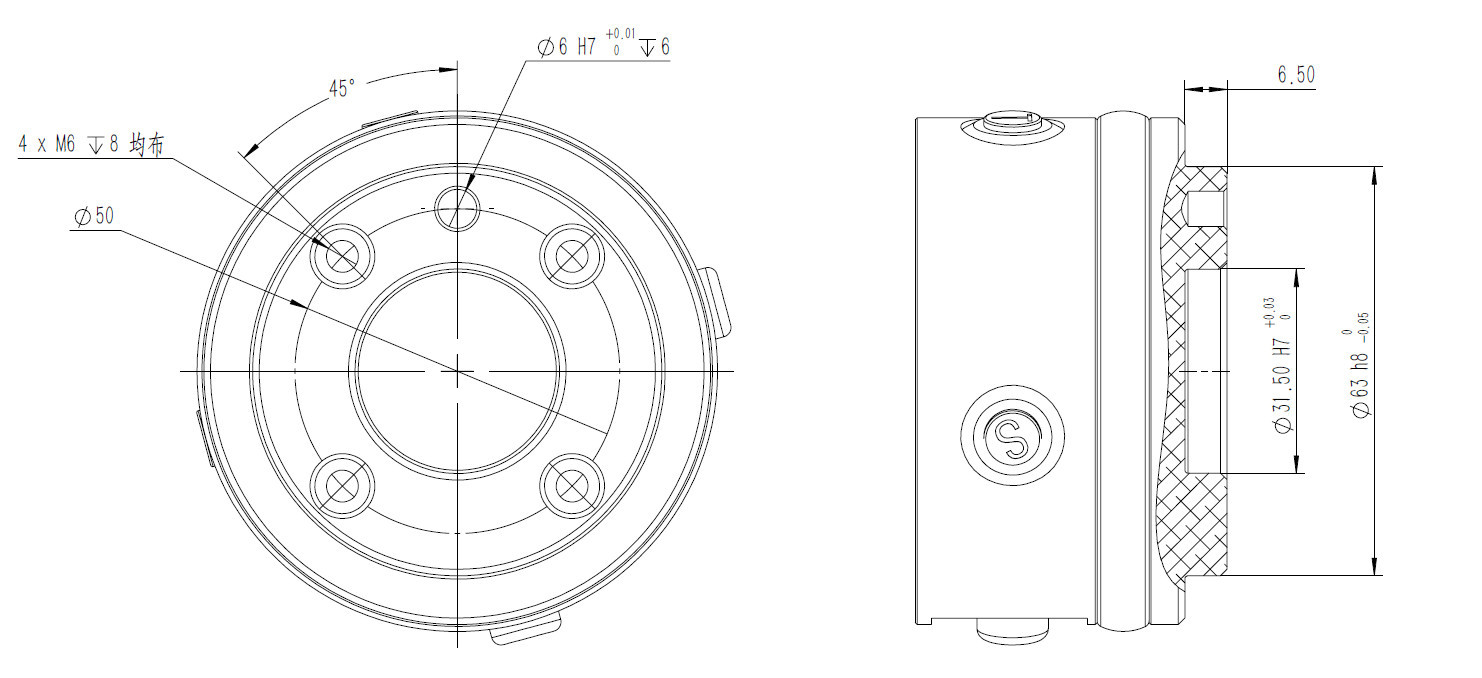
腕部法兰说明#
机器人末端为腕部法兰,法兰上有安装用螺孔和销孔,可以用于安装末端工具。法兰上的拓展I/O接口、EtherCAT通讯接口可以用于连接末端工具。
工具法兰接口:
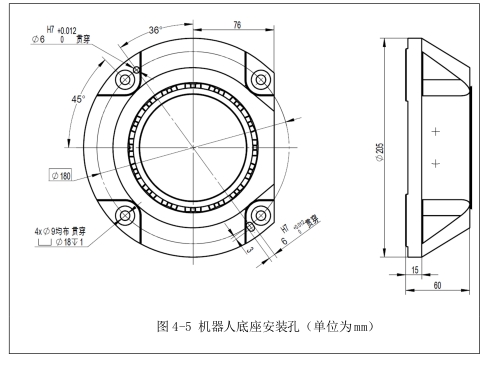
机器人的末端工具是通过未端法兰四个M6的牙孔,使用四颗M6螺丝来固定(末端法兰设计符合GB/T 14468.1-50-4-M6 暨 ISO 9409-1-50-4-M6标准),M6螺丝应为8.8等级或更高,建议锁附扭力为9Nm,若使用上对精度的要求较高,安装时可在两个直径为6mm销孔内安装定位销。
工具EtherCAT接口:
此连接器为特定机器人工具上使用的夹持器和传感器提供电源和EtherCAT控制信号,如下图所示:
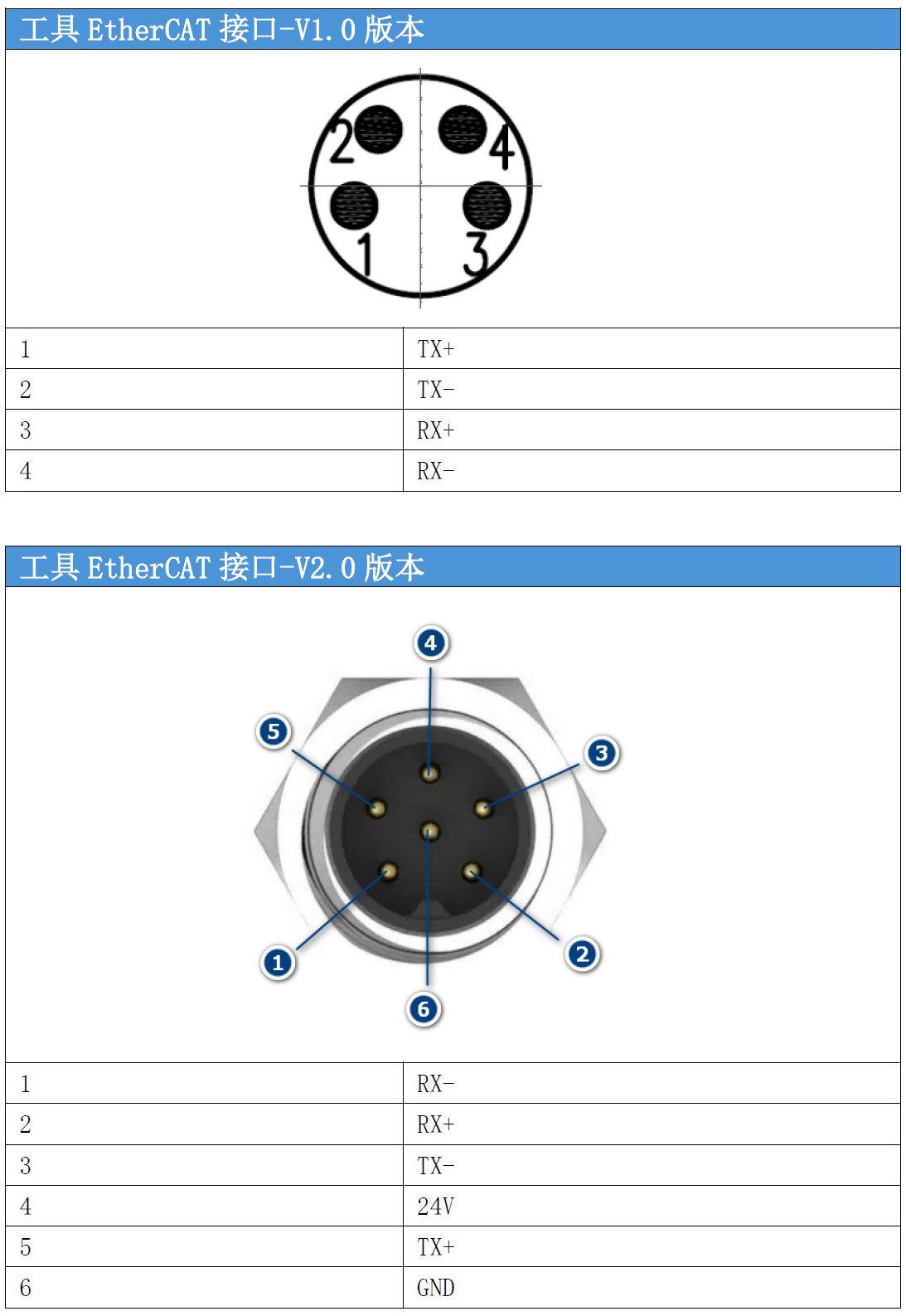
因产品功能升级迭代,具体EtherCAT接口形式请以实物为准。
其中:V2.0版本中24V电压带载能力为24V@250mA
工具I/O接口:
此连接器为特定机器人工具上使用的夹持器和传感器提供电源和I/O控制信号,如下图所示:
基本电气参数:
2路数字输出DO驱动能力(单路最大输出能力24V@500mA)
▪ 可提供工具基本的启停驱动控制
2路数字输入DI
▪ 可提供最高24V的电压输入信号
1路24V电源(注意:末端整体最大功率24W)
工具I/O接线方式如下:
灯带定义#
