GCR10-1300机器人#
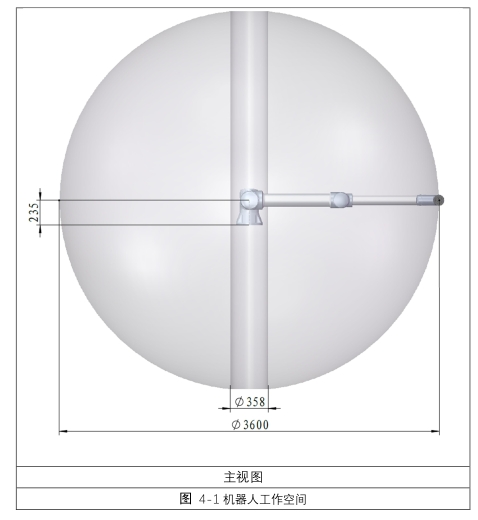
机器人技术参数#
基本参数#
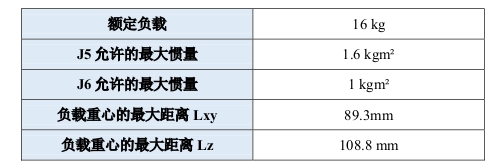
工作空间#
协作机器人工作空间的形状和尺寸如下:
负载#
负载基本参数#
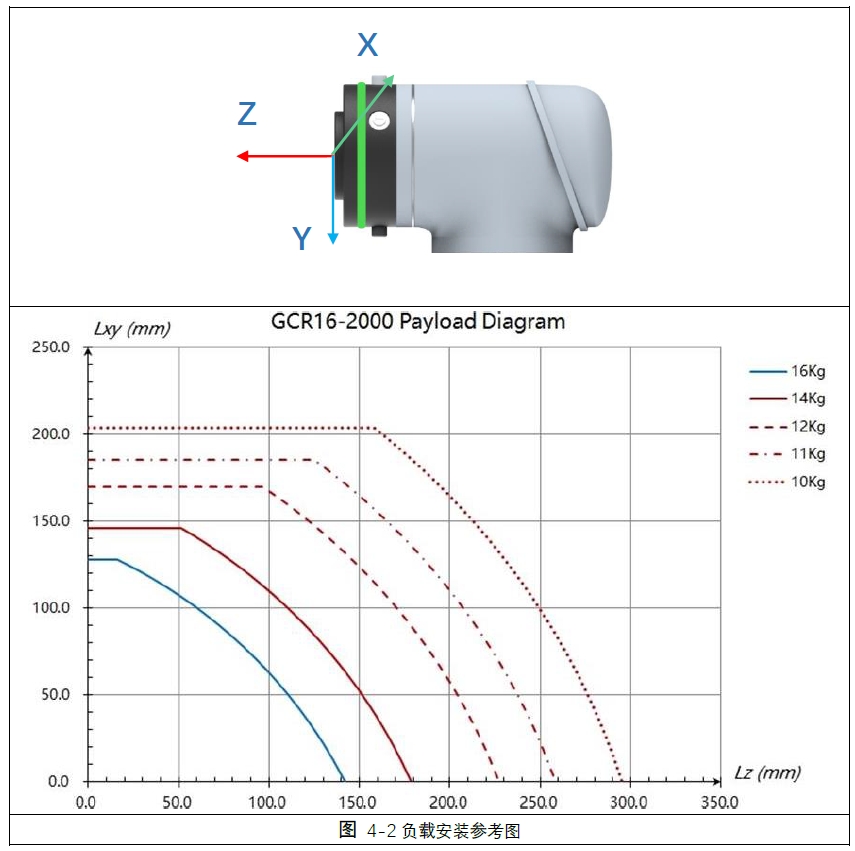
负载图#
额定负载大小与负载重心到末端轴法兰面的距离有关。对于一定的负载,负载重心与末端法兰中心的额定偏移距离如图4‑17的负载曲线所示。

该负载曲线对应于最大的负载能力。每次加载都必须检查两个值(负载质量和惯性矩)。超出时会影响机器人的使用寿命。
在此得到的负载质量和惯性矩在规划机器人的使用时非常重要。按照相应的操作及编程指南规定,将机器人投入运行时需要将负载质量和惯性矩输入到机器人控制系统中。
停止时间与停止距离#
基本说明#
关于停止参数的一般信息说明:
停止距离是指机器人从触发停止信号至完全停止时的转角。
停止时间是指机器人从触发停止信号至完全停止时所用的时间。
所示的数据针对基轴 A1、A2、和A3。基轴是偏转最大的轴。
轴的运动相互重叠时可能会导致停止行程变长。
延时运行的行程和时间按 DIN EN ISO 10218-1。
停机类别:
停机类别 0 » Stop0
停机类别 1 » Stop1
按照IEC 60204-1:
针对停机0的给出值是通过试验和模拟得出的参考值。它们是平均值,满足DIN EN ISO 10218-1规定的要求。实际的停止距离和停止时间可能会因对制动力矩的内外部影响而不同。因此建议在必要时于机器人使用现场的实际条件下测定停止行程和停止时间。
按运行方式、机器人使用情况以及触发的Stop0的数量而定,可能会出现不同的制动器磨损情况。因此建议至少每年检查一次停止距离。
轴1至轴3在Stop0的停止时间和停止距离#
下表为在触发停机类别为停机0时的停止距离和停止时间。这些数据针对以下配置:
作用范围 l = 100 %
速度倍率 POV = 100 %
质量m = 最大负载

铭牌与标签#
机器人和控制系统上装有下列铭牌与标签。不允许将其去除或使其无法识别。必须更换无法识别的铭牌与标签。

机械安装#
底座参数#
下面给出了底座安装所需要的特定的力和力矩,已经包括了机器人的负载和惯性力。


底座安装#
机器人本体使用4颗M8(10.9级及以上)螺栓、2颗Ø6的销钉,通过机器人底座上的4个9mm孔和2个销孔来安装定位。螺栓建议以35N·m扭矩紧固。
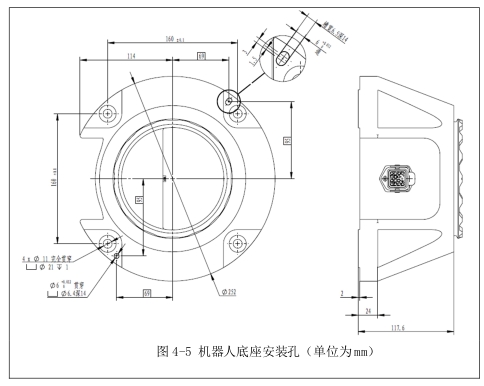
机器人必须安装在一个坚固的表面上,该表面应当足以承受至少10倍的底座关节的完全扭转力,以及至少5倍的机器人手臂的重量。此外,该表面应没有震动。如果机器人安装在线性轴上或是活动的平台上,则活动性安装底座的加速度应很低,高加速度会导致机器人触发保护性停止。

腕部法兰参数#
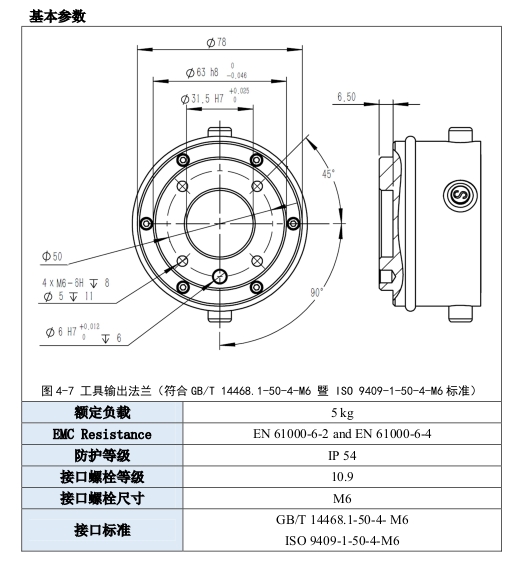
工具安装#
机器人工具法兰有四个M6螺纹孔,可用于将工具连接到机器人。需要以15N·m的扭矩紧固这些螺孔。如果需要非常准确地调整工具位置,还可以用Ø6的销孔,加销固定。图4‑23显示了销孔位置和螺丝安装位置。
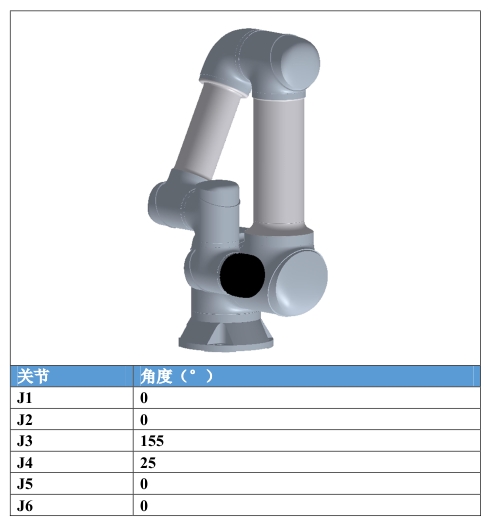
打包姿态#
机器人在打包前需要移动至打包姿态。打包姿态对应的各关节角度如下表所示。
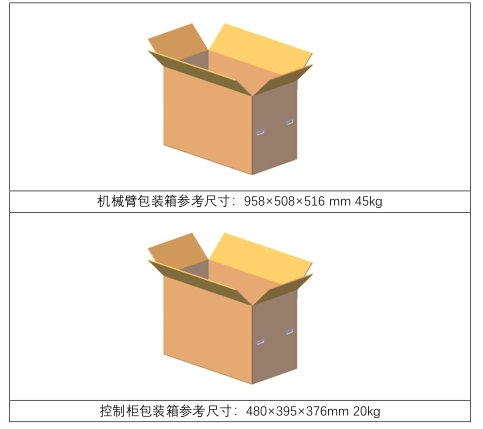
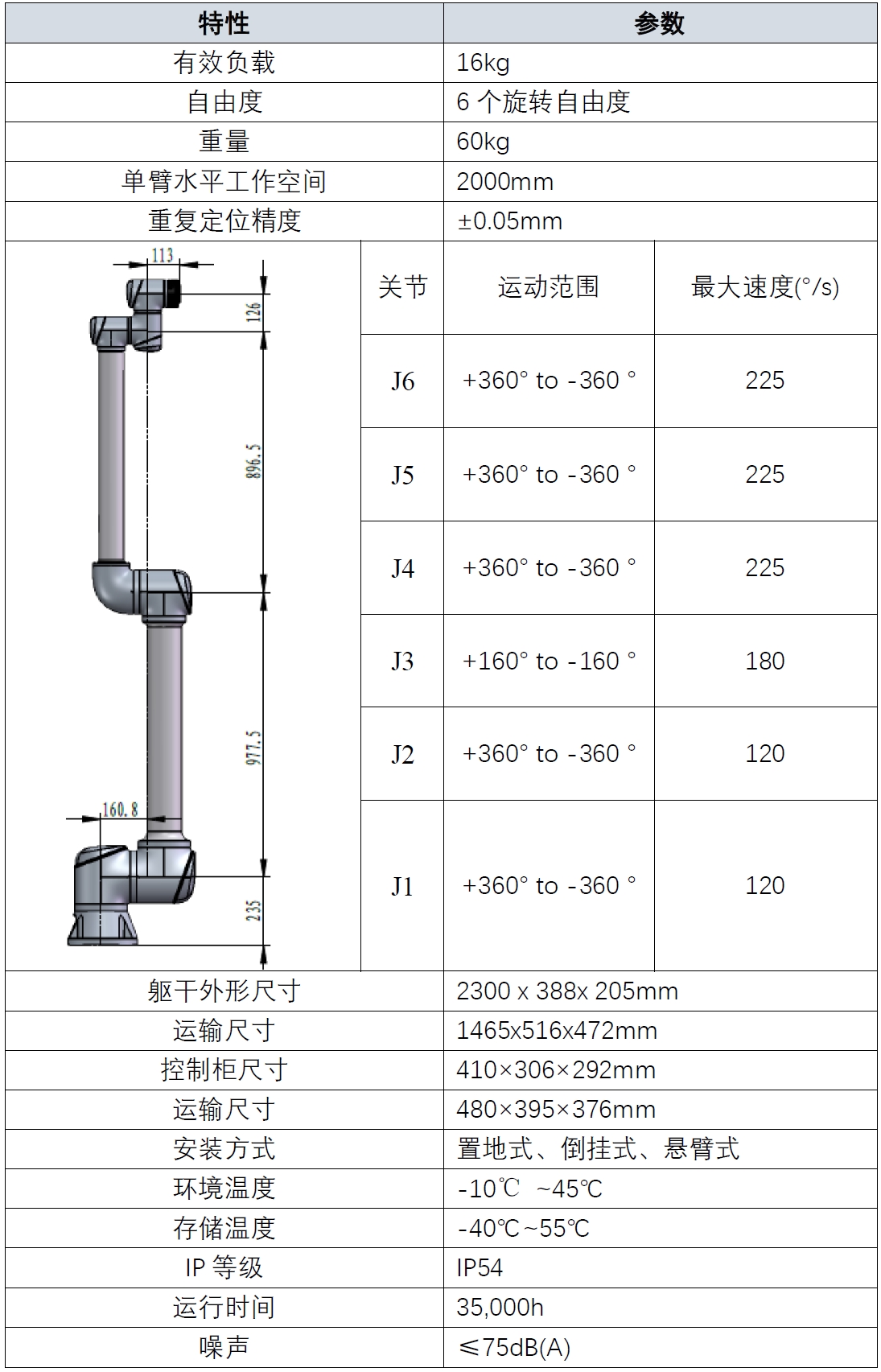
运输尺寸#
提供的包装箱尺寸如下。