运输 存放#
本章包含了运输、存储机器人的信息。主要介绍运输存储机器人系统的各个部件应注意的基本事项。
运输#
前提条件#
机器人:
运输时保持好原包装,将包装材料保存在干燥处。之后可能需要包装并移动机器人。从机器人的包装材料中将机器人移至安装位置时,同时抬升机器人手臂管。扶住机器人直至机器人底座的所有螺栓全部紧固好。整个运输过程中直到机器人被固定好前,机器人都应该保持打包位姿(请详见第5章)。
控制系统:
控制柜在运输及放置时应保持竖直,运输过程要避免振动与碰撞,以免造成控制系统损坏。
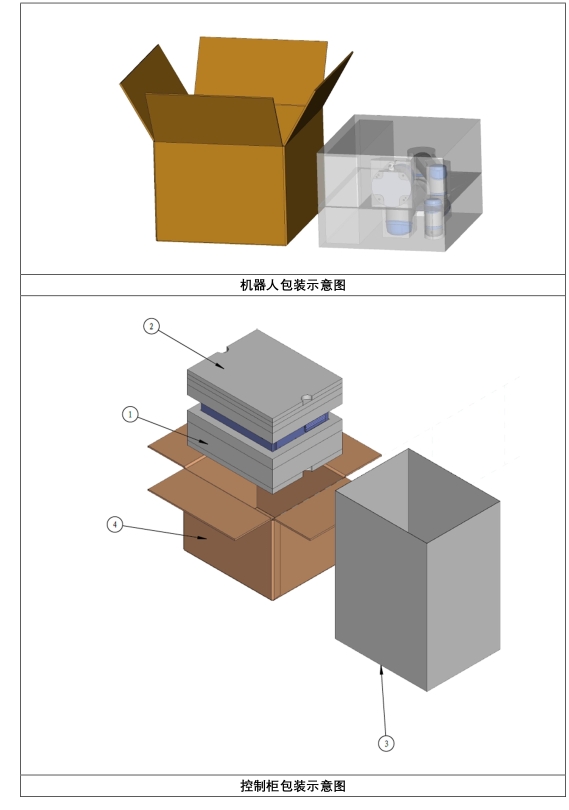
机器人的包装#
包装步骤如下:
松开并拔下任何外部工具及外围设备。
将机器人移动至打包姿态,关闭机器人电源。
松开并断开机器人和控制柜的连接。
拔出接地安全引线,拆除安装螺钉。
清洁并干燥机器人。
将机器人放入包装箱中。
将机器人和控制柜包装到指定包装箱中,务必确保机器人和控制柜方向正确。
存放#
前提条件#
长时间存放机器人必须注意下列各点:
存放地点应干燥无尘
避免温度波动
避免形成冷凝水
避免阳光直射
避开气流
选择合理的存放温度范围
选择不会使包装受损的存放地点
只能将机器人控制系统存放在封闭的空间内
操作步骤#
存放机器人的步骤如下:
1、 松开并拔下外围设备接口。
2、 将机器人移动至打包姿态,关闭机器人电源。
3、 松开并断开机器人和控制柜的连接。
4、 拔出接地安全引线,拆除安装螺钉。
5、 清洁并干燥机器人。
6、 将机器人放入包装箱中。
7、 准备将机器人仓储。
机器人长期存放后操作#
机器人采用谐波齿轮技术,关节部分密封并具备自润滑功能(在使用寿命内无需更换或添加油脂)。正常运行期间内,润滑油会自然分布在齿轮和轴承周围,以保持机械系统的正常润滑。 机器人在存储或者停止时间超过1个月以上,或者长期关节处于极小范围运动时,建议周期性采取如下措施,这将有助于机器人的使用寿命。
在接通电源前,请将机器人置于室温(如存放在较冷的环境中);
接通机器人电源,使其保持在静止状态30min,这将使机器人达到其内部工作温度并软化润滑脂;
手动模式下,一一缓慢运动所有关节,注意先不要加载任何有效载荷以及工具;
创建一个程序,至少让所有关节缓慢连续运动20min(建议采用默认加速度,速度设置在10°/s左右,并让关节转动尽可能大的角度)。