


状态栏#
界面头部状态栏如下图所示:

状态指示灯:
指示灯颜色有三种:红色、橙色、绿色。机器人未使能状态或焊机在出错状态时,指示灯显示为红色; 机器人在使能状态且焊机就绪时,指示灯显示为橙色;程序在运行时,指示灯显示为绿色。
状态显示:
状态显示字样有:机器人未使能、焊机故障、焊接中、运行中、待机。点击状态指示灯或状态显示任意区域, 会弹框显示如下,可以对机器人状态、焊机电源状态以及外部轴状态进行显示或操作。

工件名称:
显示当前打开的工件名称。
安装:
显示机器人当前安装方向以及安装位姿描述。单击“安装”显示框,显示机器人安装方向和安装位姿描述信息弹出框,如图所示。

工具:
显示机器人当前工具坐标系名称和负载质量。单击“工具”显示框,显示机器人工具坐标系相关信息的弹出框,如图所示。

工件:
显示机器人当前工件坐标系名称。单击“工件”显示框,显示机器人工件坐标系信息的弹出框,如图所示。

JOG速度/类型:
显示机器人当前JOG速度百分比或JOG类型,即关节JOG或空间JOG。单击JOG显示区域,会弹框显示JOG速度调节滑块 和JOG类型选择按钮,可以调节JOG速度或手动输入,还可以对空间JOG或关节JOG进行切换。

全局速度:
显示机器人当前全局速度的百分比。单击速度显示框,显示速度调节滑块,可以调节全局速度或手动输入。

操作模式:
显示机器人操作模式,分手动模式和自动模式两种。单击该显示框,会显示包含手动模式和自动模式按钮的弹出框, 通过单击对应按钮进行操作模式的切换。当用户进行手动/自动模式切换时,用户需要输入正确密码后才可以进行模式切换。

牵引模式: 使用摇杆的情况下,显示当前激活的模式。包括关节牵引/笛卡尔牵引;高速牵引/低速牵引。用户可通过手柄上的按钮去切换使用的模式。
点击该区域,将弹出牵引控制窗口。用户可在该窗口调节牵引的类型、方向、柔顺度等。

用户头像:
默认登录进入工艺包是普通模式,且单击用户头像显示如下图所示弹出窗。

切换高级模式: 单击输入密码后会进入高级模式;
关于: 显示机器人型号、软件版本以及工艺包版本等信息;
注销: 单击返回焊接工艺包V2启动页面;
重启: 在机器人断电状态下,单击会弹出确认关闭系统的对话框;机器人未断电状态下则会提示先断电;
关机: 在机器人断电状态下,单击会弹出确认重启系统的对话框;机器人未断电状态下则会提示先断电;
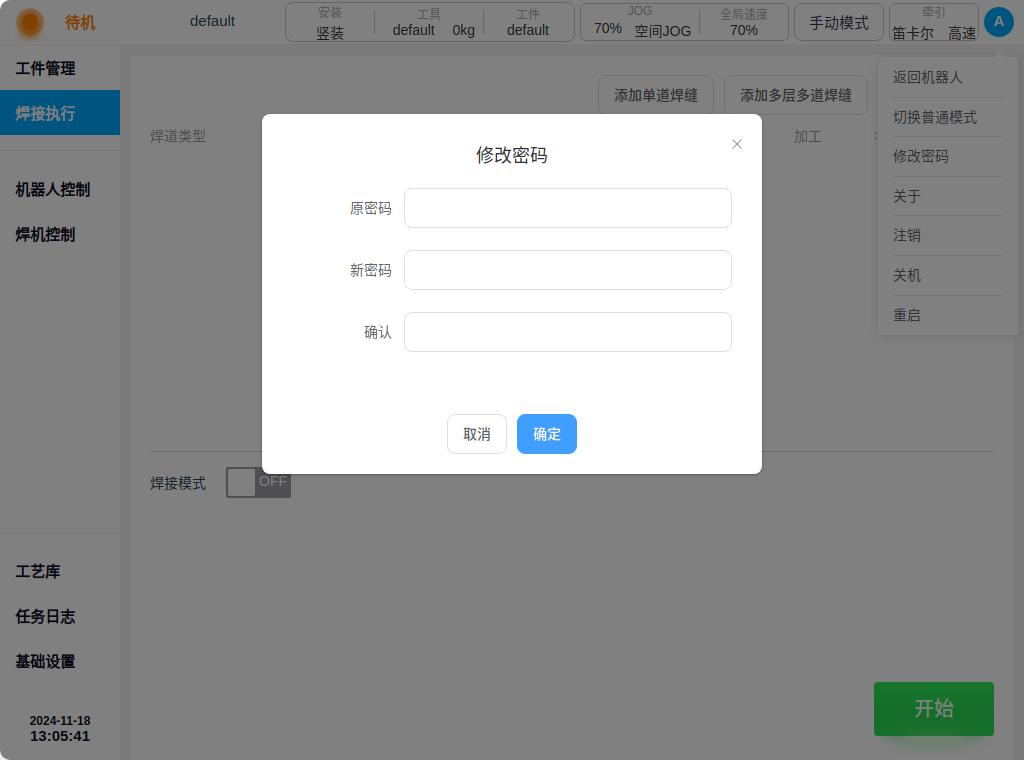
在高级模式下,点击用户头像显示如下图所示。

切换普通模式: 单击直接进入高级模式;
关于、注销、关机、重启功能同普通模式下的功能。
高级模式下特有的功能:
返回机器人: 单击直接进入机器人系统页面;
修改密码: 单击弹出修改密码的对话框,可以修改密码;
关于高级模式和普通模式的区别请查看 用户模式