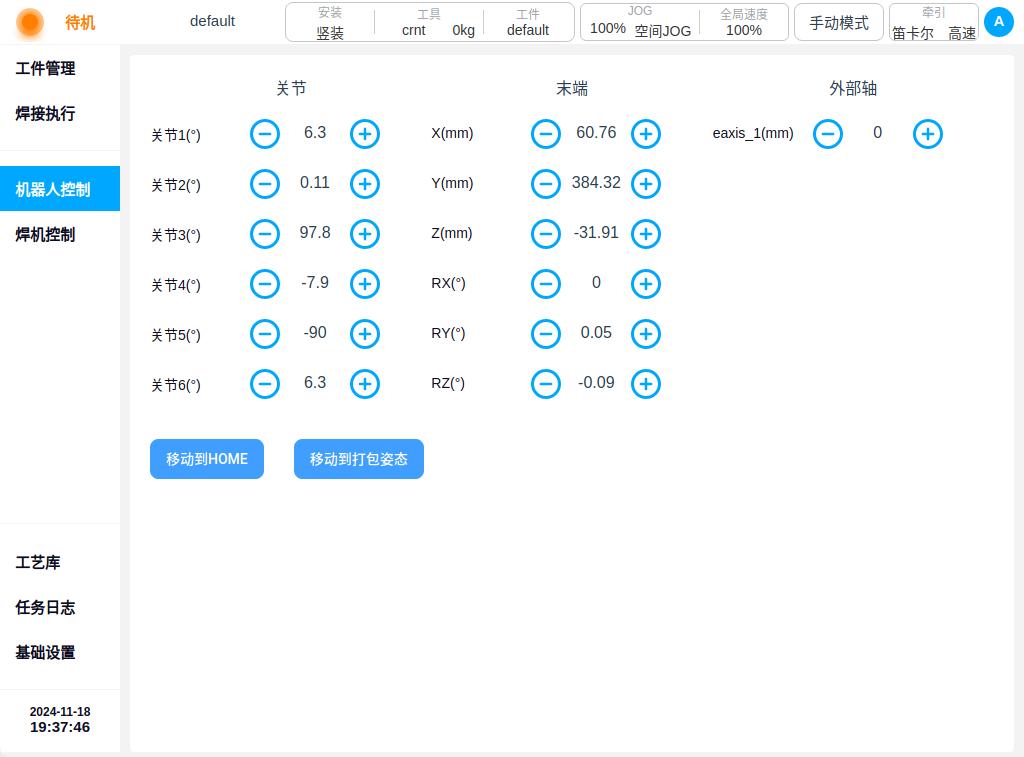
单击导航栏中“机器人控制”进入机器人控制页面,如下图所示。
机器人控制页面可以做机器人关节JOG、末端笛卡尔空间JOG,若安装了外部轴,还可以对外部轴进行JOG操作。 长按页面“移动到HOME”按钮,可以控制机器人运动到设置的原点位置;长按页面“移动到打包姿态”按钮, 可以控制机器人运动到设置的打包装箱位置。