


焊接设置#
焊接设置子页面用于设置在线微调、焊接空跑倍率、焊接位置保护以及监控位置和监控时间,如下图所示。
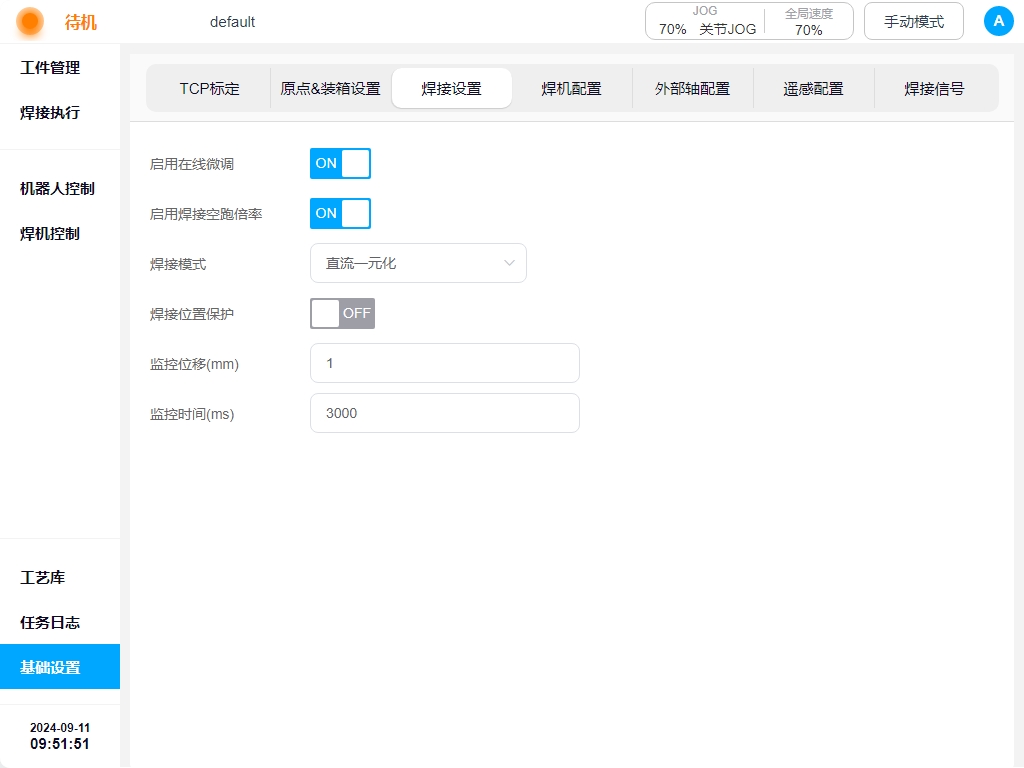
启用在线微调: 可以在焊接过程中在线对工艺参数进行微调修改。
启用焊接空跑倍率: 焊接空跑被率功能启用后,在焊机未使能时,允许机器人以倍速运行,快速观察焊接轨迹的正确性。 倍率在工艺运动参数里进行设置。
焊接模式: 可以设置焊机的焊接模式。
Note
该选项可设置焊机的焊接模式,并立即生效。对于工作站模式下的焊接任务,使用的工作模式由选择的工艺文件确定。
焊接位置保护: 焊接过程中的保护功能,其原理是实时监控机器人工具末端是否有超过监控位移的位移量。 如果在设置的监控时间内,机器人工具末端未产生足够的位移量,判断为机器人在同一位置,此时将触发焊机收弧指令。 该功能的目的是,不让机器人在同一位置有长时间的焊接操作,以防焊件烧穿。
监控位移(mm): 设置监控位移的位移值,单位mm。
监控时间(ms): 设置的监控时间,单位ms。