Manutenção de segurança#
Travão de libertação manual#
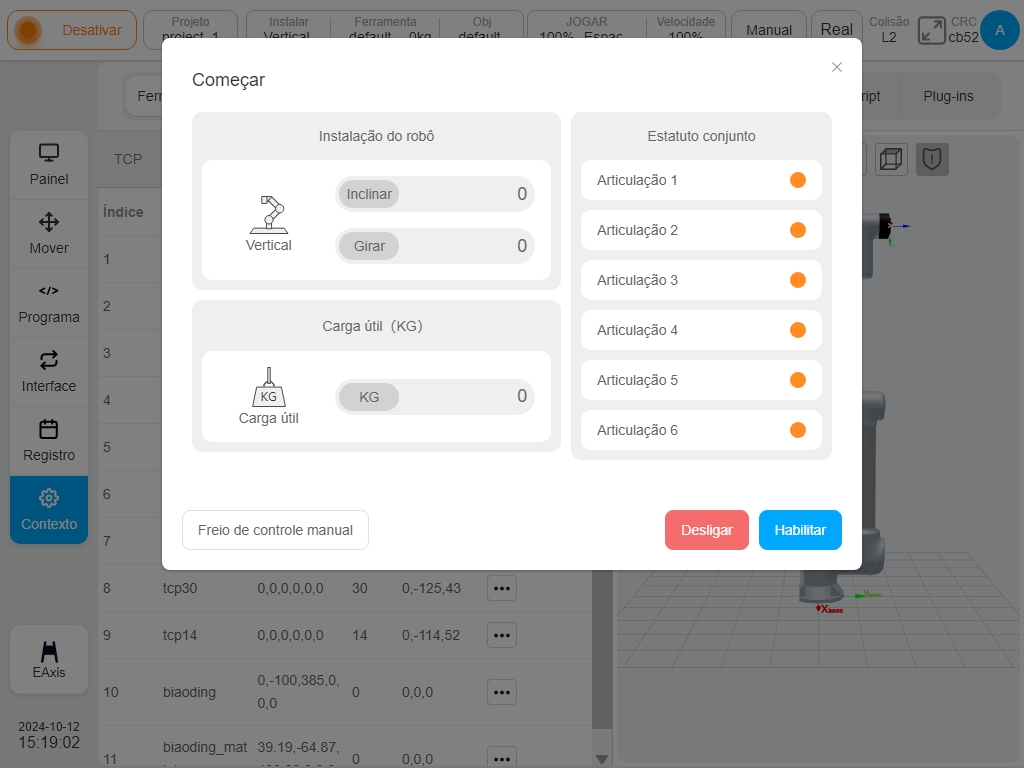
Em alguns casos, o utilizador terá de soltar manualmente o travão numa única articulação. Quando o robô está ligado mas não está ativado, a entrada para libertar manualmente o travão aparece na página de arranque que é mostrada como na figura.
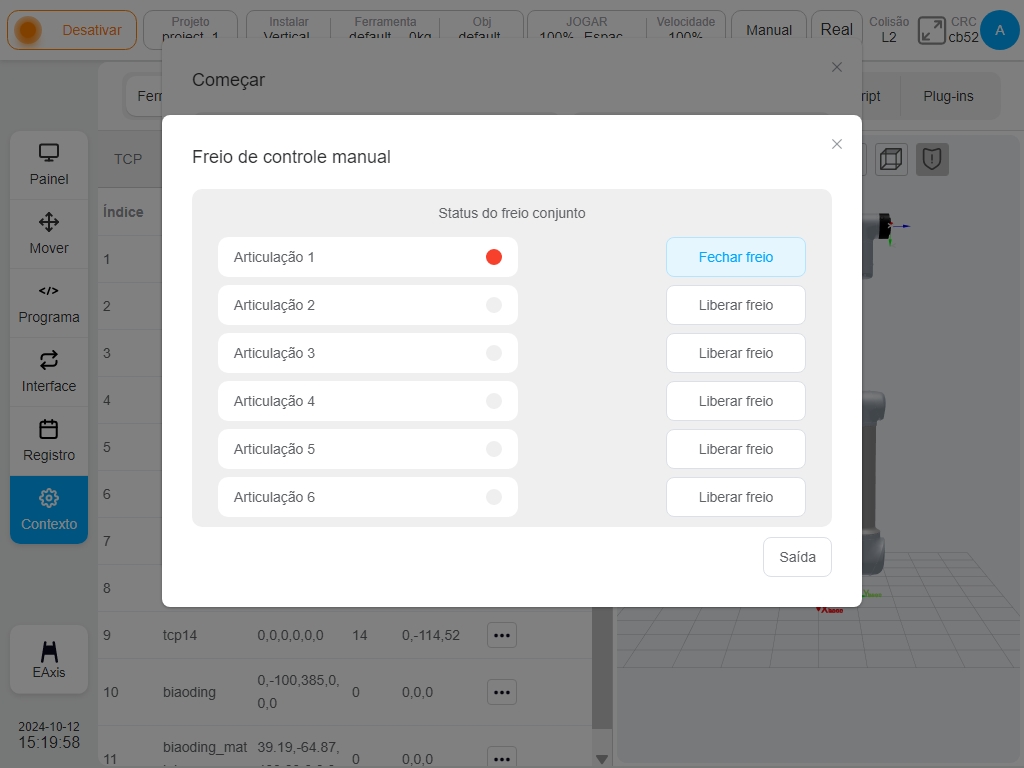
Clique em para aceder à página do travão de libertação manual, como mostra a figura. O lado esquerdo da página mostra o estado do travão de cada articulação, em que a cor cinzenta indica que o travão está fechado e a cor vermelha indica que o travão está solto. No lado direito, encontra-se o botão «Controlo do travão», no qual pode clicar para controlar a abertura e o fecho do travão.
Teste dos travões#
Os utilizadores têm de efetuar o teste dos travões de acordo com o calendário previsto, para evitar o risco causado pela avaria dos travões do robô. O sistema lembrará periodicamente o utilizador de realizar o teste de travões, sendo o período de lembrete predefinido de 30 em 30 dias.
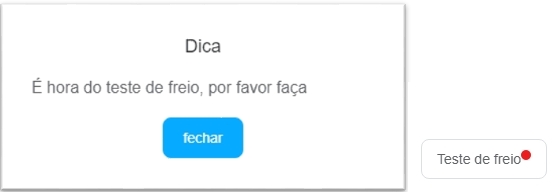
Quando o tempo definido tiver decorrido desde o último teste do travão, aparecerá a seguinte caixa de diálogo, solicitando ao utilizador que efectue o teste do travão. A entrada do teste do travão na página de arranque será apresentada com um pequeno ponto vermelho, para lembrar o utilizador.
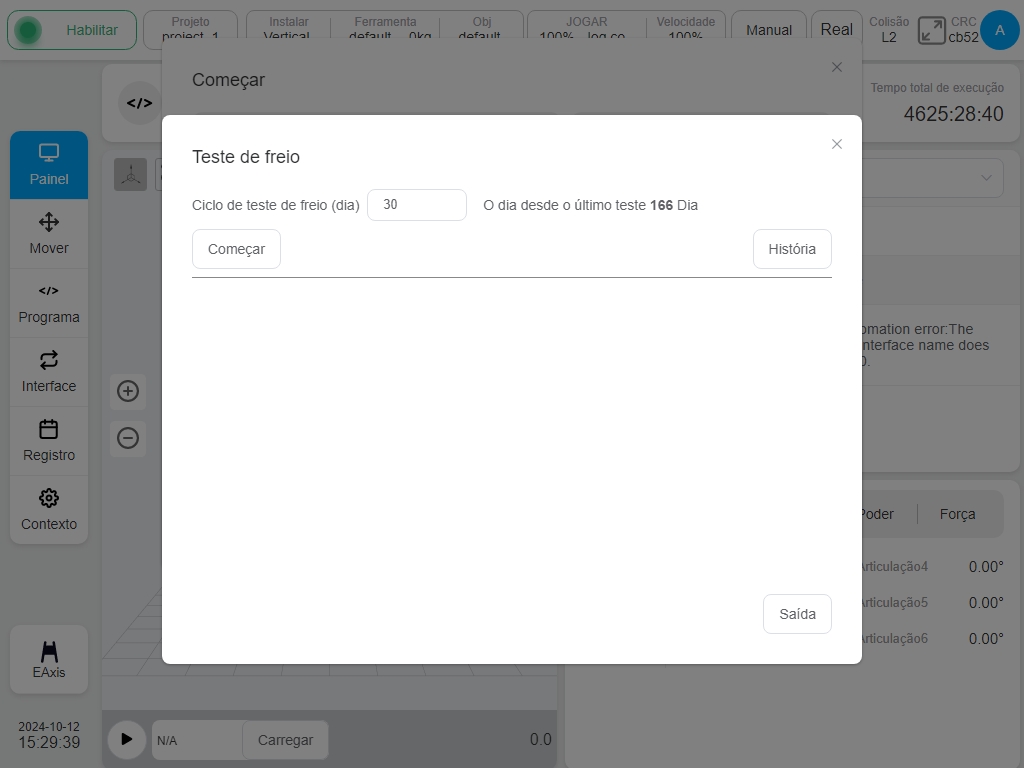
Quando o robot está ativado, aparece na página inicial uma entrada para a função de teste do travão. Clique no botão para entrar na página de teste do travão que é mostrada na figura. Esta página apresenta o período de teste do travão e o número de dias desde o último teste do travão.
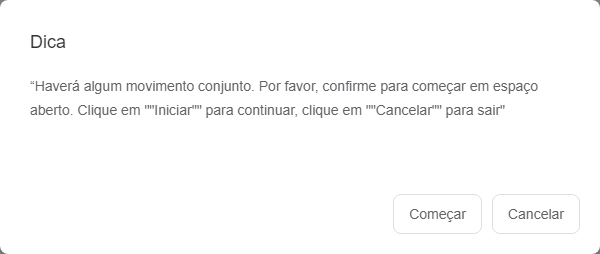
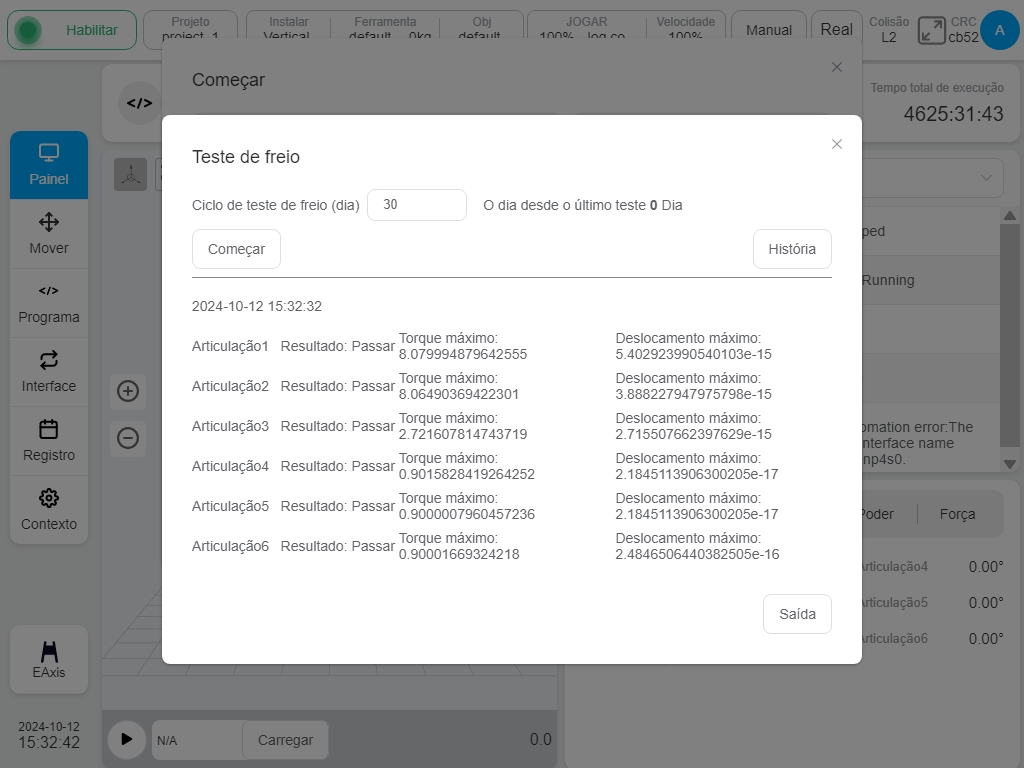
Ao clicar no botão «Start Detection» (Iniciar deteção), aparece a seguinte caixa de diálogo e, em seguida, segue as instruções para efetuar as operações. Durante o processo de deteção, é possível fazer uma pausa e parar o processo de deteção em qualquer altura. Após a conclusão do teste, é apresentado o resultado do teste do travão.
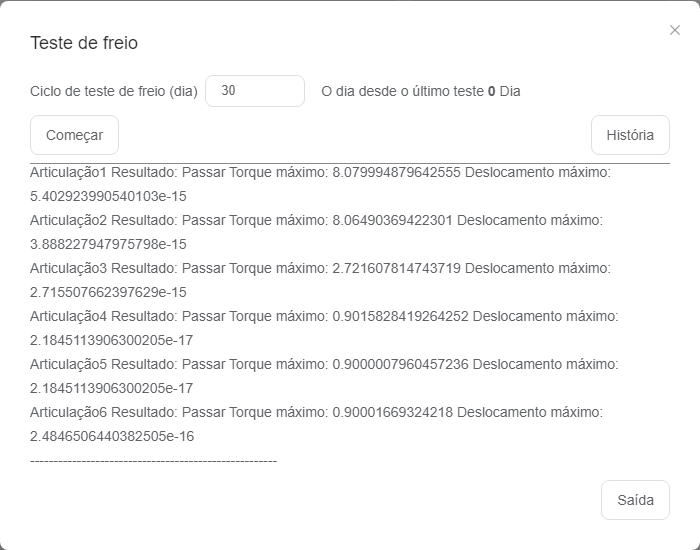
Clique no botão «Dados históricos» para ver a hora e os resultados dos testes de travagem anteriores.
Verificação da posição da junta ao ligar#
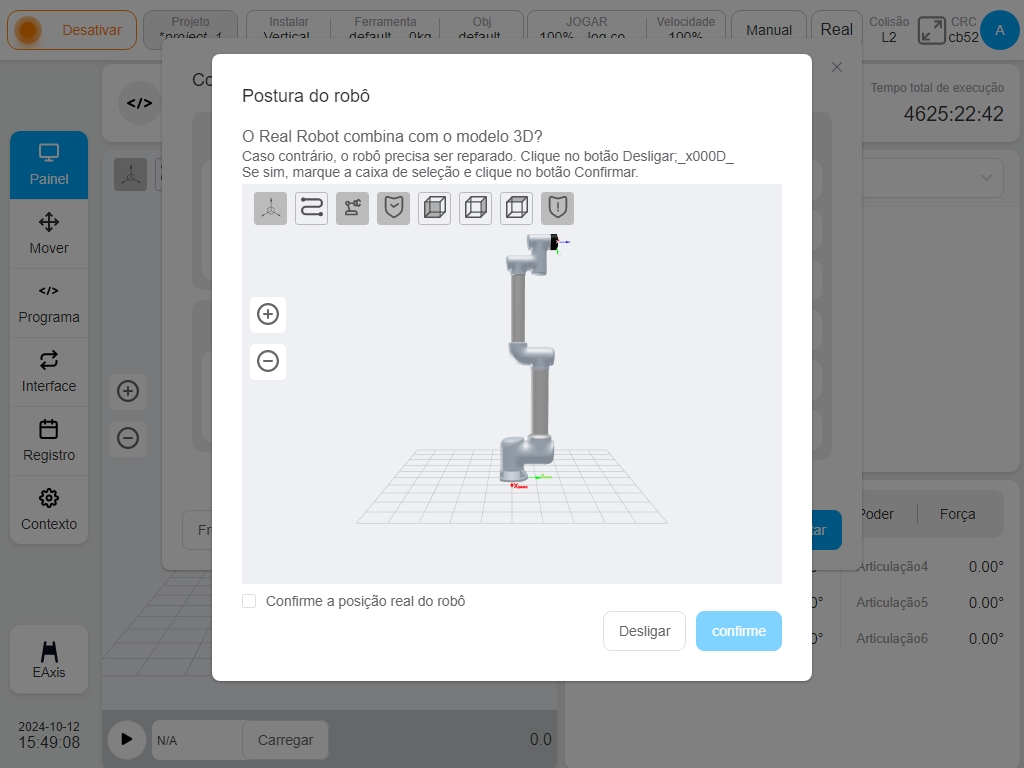
Quando o robô é ligado, detecta se a articulação foi significativamente rodada no estado desligado para garantir a segurança da utilização.
Se a articulação tiver sido rodada significativamente, aparece a seguinte caixa de diálogo. O utilizador confirma se a pose do robô real é consistente com o modelo 3D na interface. Em caso afirmativo, clicar em «Confirmar que a postura do robô apresentada acima é consistente com a postura real» e, em seguida, clicar no botão «Confirmar» para continuar a operação de ligação. Em caso negativo, clicar no botão «Power off» (Desligar) para desligar a alimentação eléctrica do robô e contactar o pessoal de manutenção.