Página de interface#
Clicando no botão «Interface» na barra de navegação, é apresentada a subpágina E/S na página de interface. Existem 6 subpáginas na página de Interface, incluindo E/S, Registo, CCI, TCI, TCP/IP e Barramento Industrial. De acordo com o modelo do armário de controlo, existem dois tipos de páginas, como mostra a figura:
Adequado para o armário de controlo DC30D
Adequado para o quadro de controlo DC00 / DC15S-J9 / DC30D-J9
A parte superior da página (1) é o TAB da subpágina da página de interface e a parte inferior (2) é a área de visualização da subpágina correspondente. Quando o utilizador seleciona uma opção de subpágina diferente, a área ② corresponde ao conteúdo de visualização comutado para essa opção.
IO#
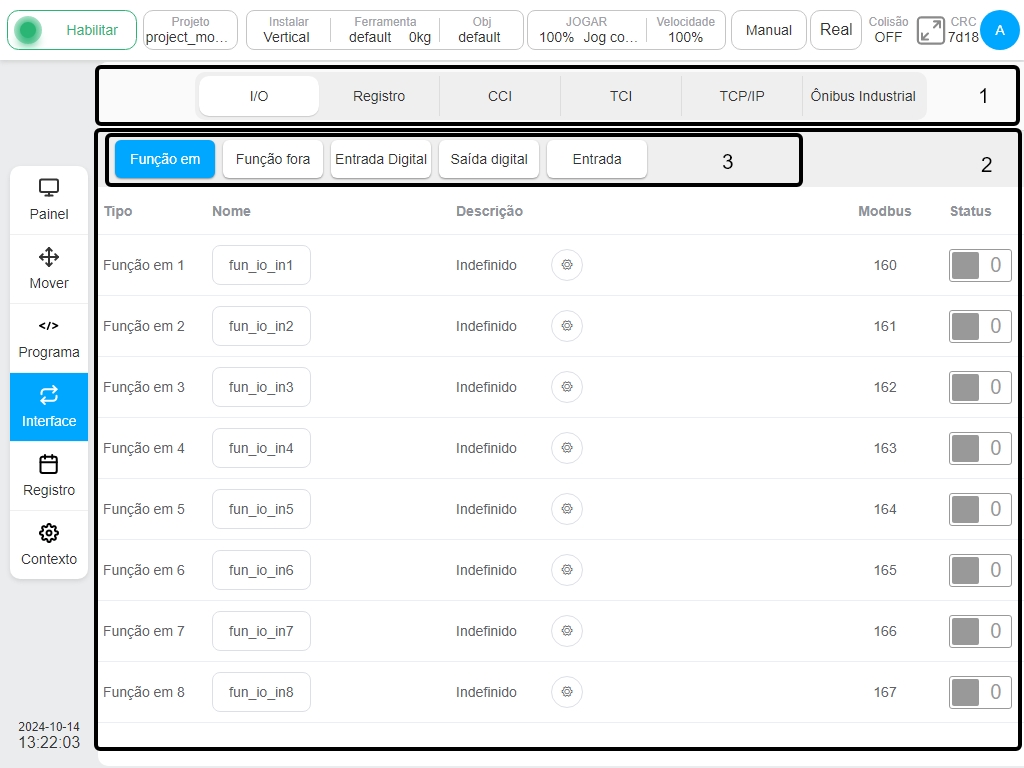
A área ② na figura mostra os conteúdos correspondentes de diferentes separadores da subpágina E/S, acima dela está a área de visualização da subpágina E/S, ③ é a etiqueta criada na subpágina E/S para diferentes entradas e saídas.
Para o quadro de controlo DC30D, existem cinco tipos de entrada de função, saída de função, entrada geral, saída geral e entrada analógica na subpágina I/O. Clique em diferentes barras de etiquetas para mudar e apresentar cinco tipos de informação de estado de entrada ou saída.
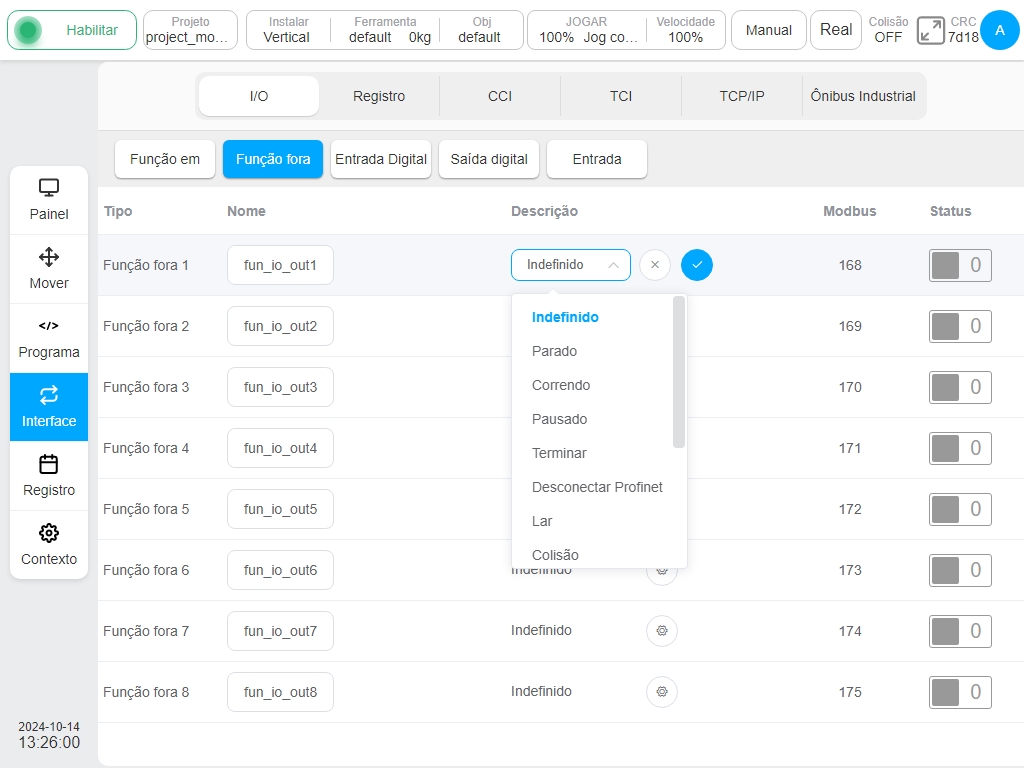
A interface de entrada de funções pode monitorizar o estado e as informações básicas da entrada digital de 8 vias que pode definir uma determinada função no armário de controlo. Clique numa função para introduzir um nome. É apresentado um teclado virtual comum. O utilizador pode modificar o nome predefinido da função. Após a introdução do nome predefinido para a função de modificação, o ícone ① mostrado na figura será apresentado à direita da caixa de visualização do nome. Clique no ícone para restaurar o nome de entrada da função para o nome predefinido correspondente.
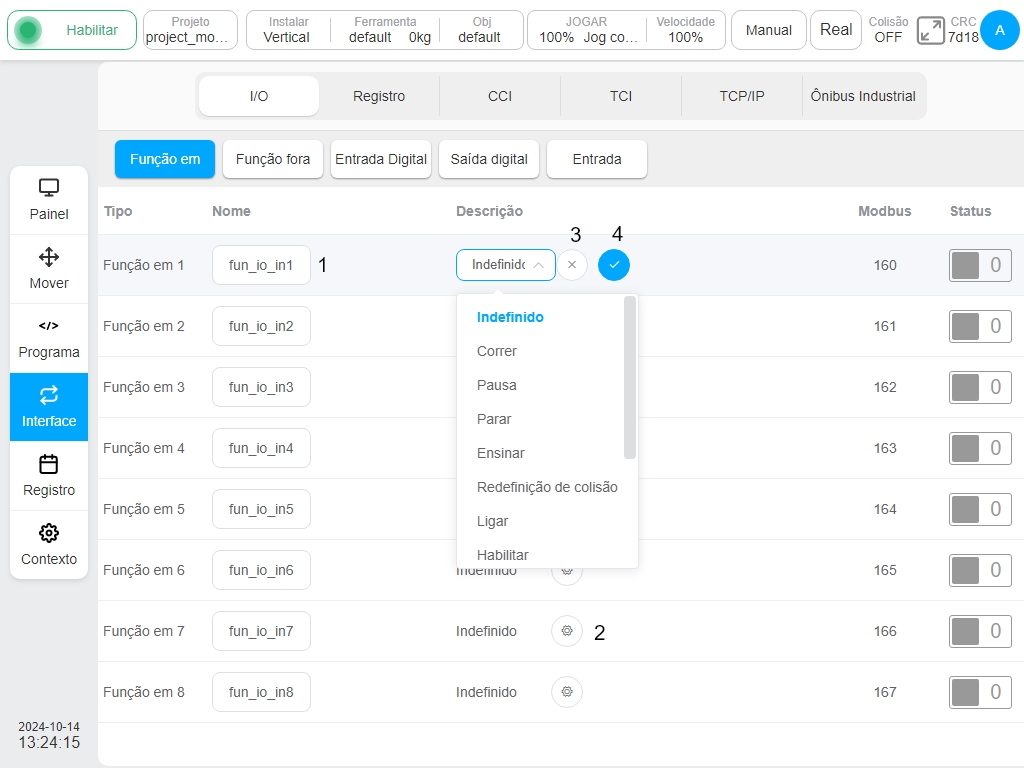
Clique no ícone de entrada de função correspondente ② na figura, o seletor de configurações de função, ícone ③ e ícone ④ serão exibidos e o usuário poderá selecionar as configurações de função da entrada de função. Selecione a função na caixa suspensa do seletor de função de exibição e insira o item de função que deseja definir. Clique no ícone ④ para determinar o item de função selecionado. Você também pode desmarcar o recurso selecionado clicando no ícone ③. Quando o sinal de entrada da função é acionado, a função definida é ativada. Atualmente, a entrada de função suporta as seguintes funções: Executar, Pausar, Parar, Ensinar, Redefinição de colisão, PowerOn, Ativar, Desativar, Desligar, Desligar, Gravar pose, Casa, Abortar movimento.
Nota
Executar, Pausar, Parar, Abortar O movimento é acionado por sinais de gatilho de borda ascendente.
Nota
O comando Abortar movimiento só leva efeito para a tarefa de movimentação que está sendo executada pelo robô quando o sinal de comando é acionado. Se um programa estiver em execução, os scripts a seguir continuarão em execução.
A interface de saída de função pode monitorar o status e as informações básicas da saída digital de 8 vias que pode definir uma determinada função no gabinete de controle, conforme mostrado na figura. Semelhante à interface de entrada de função, você pode modificar o nome correspondente da saída da função e selecionar a função Configurações da saída da função. Na caixa suspensa do seletor de configurações da função, selecione a quantidade de status do sistema predefinida vinculada à saída da função. Depois de clicar no ícone “OK”, a saída da função refletirá o status da quantidade de status do sistema definida. No momento, a saída da função suporta estados de ligação: Ocioso, Em execução, Pausado, Concluir, Desconectar profinet, Casa, Colisão, Modo automático, Desligar, Desativar, Robô em movimento, Desconectar ethernet, Energia do robô, Manuseio, Mover Abortado.
Nota
O sinal Movimiento abortado só será verdadeiro quando o robô estiver executando uma tarefa de movimentação e a tarefa de movimento for abortada por um comando de anulação da tarefa de movimentação da entrada de E/S da função, entrada de registro de função ou outra interface. O sinal Move Task Aborted só pode ser redefinido através da redefinição da entrada de E/S da função ou da entrada de registro de função, que é configurada como a fonte do comando de anulação da tarefa de movimentação, e a saída de E/S da função é redefinida como baixa ao mesmo tempo.
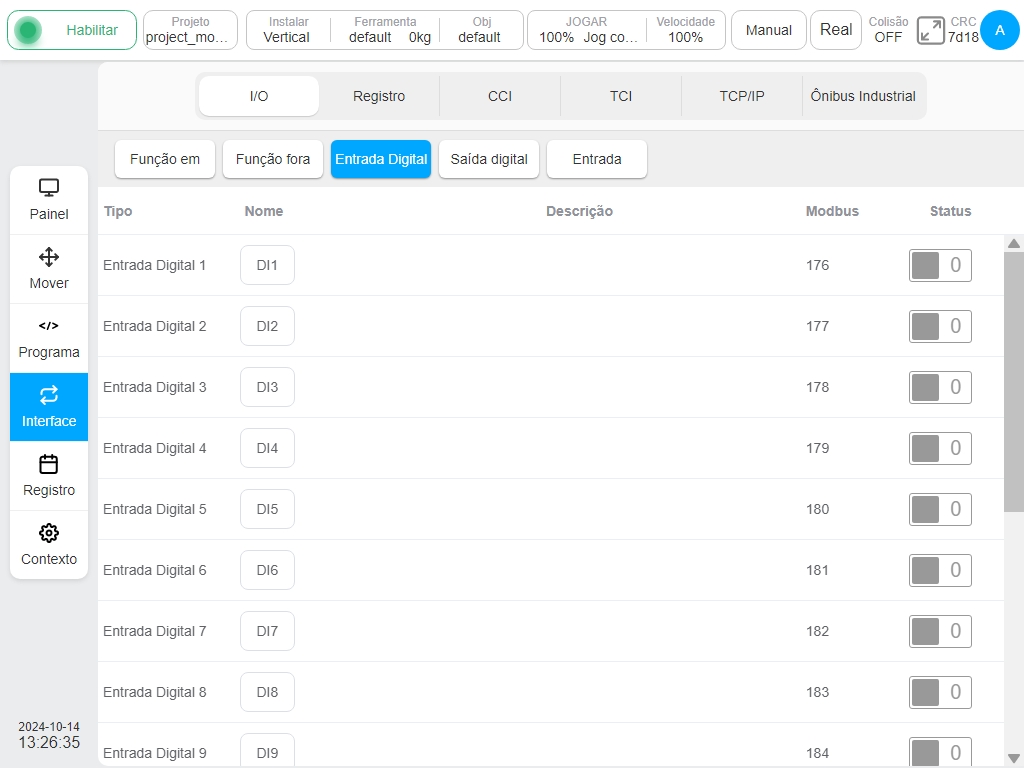
A interface de entrada geral pode monitorizar o estado e a informação básica da entrada digital normal de 16 vias no armário de controlo, como mostra a figura. Ao contrário das interfaces de entrada e saída de funções, apenas o nome correspondente e a recuperação modificada do sinal de entrada podem ser modificados, não sendo possível definir funções específicas.
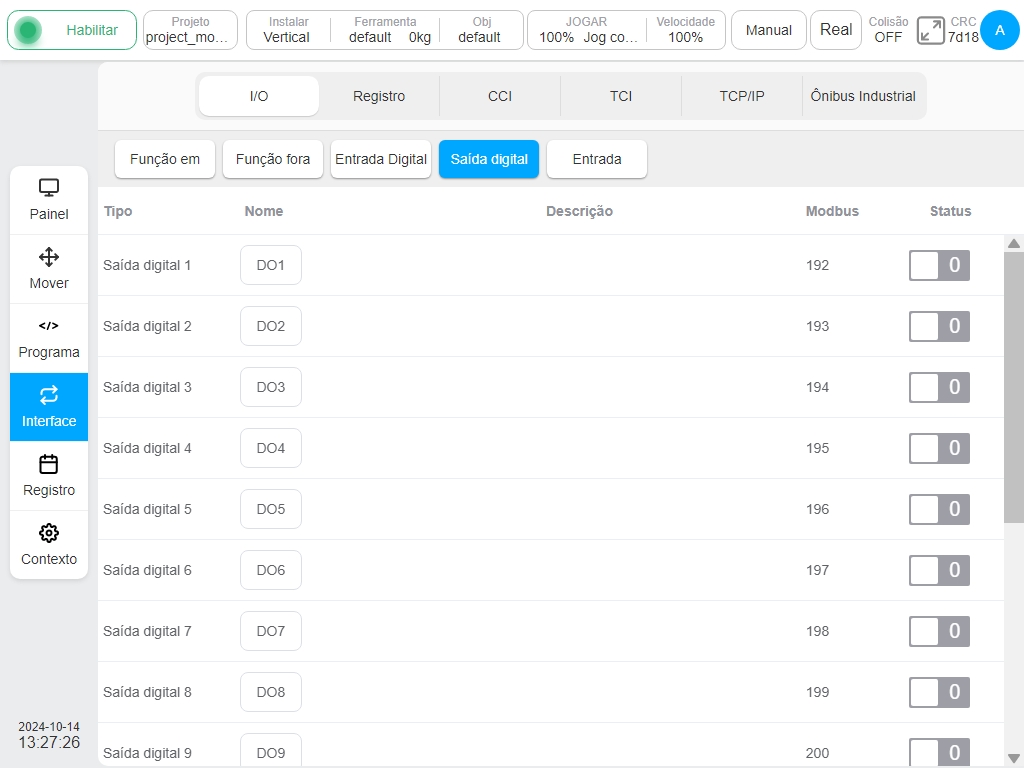
A interface de saída geral pode monitorizar o estado e as informações básicas da saída digital normal de 16 canais no armário de controlo, como mostra a figura. A interface só pode modificar o nome correspondente e restaurar o sinal de saída após a modificação, e não pode definir funções específicas.
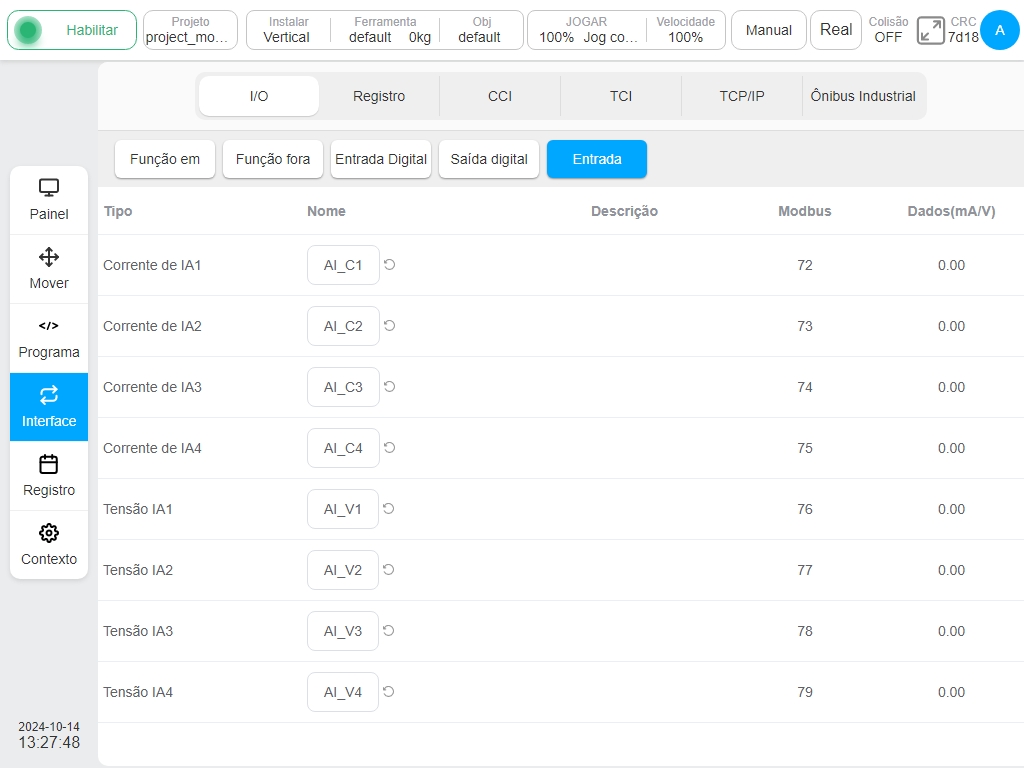
A interface analógica pode monitorizar 4 sinais analógicos de entrada de corrente e 4 sinais analógicos de entrada de tensão, como se mostra na figura. Da mesma forma, clique na caixa de visualização do nome do sinal de entrada analógico para modificar o nome do sinal. As operações são semelhantes às da E/S funcional e da E/S genérica descritas acima e não são repetidas aqui.
Para os armários de controlo DC00 / DC15S-J9 / DC30D-J9, existem seis tipos de entrada geral, saída geral, entrada de função, saída de função, entrada analógica e saída analógica na subpágina I/O. Clique em diferentes barras de etiquetas para mudar e apresentar seis tipos de informação de estado de entrada ou saída.
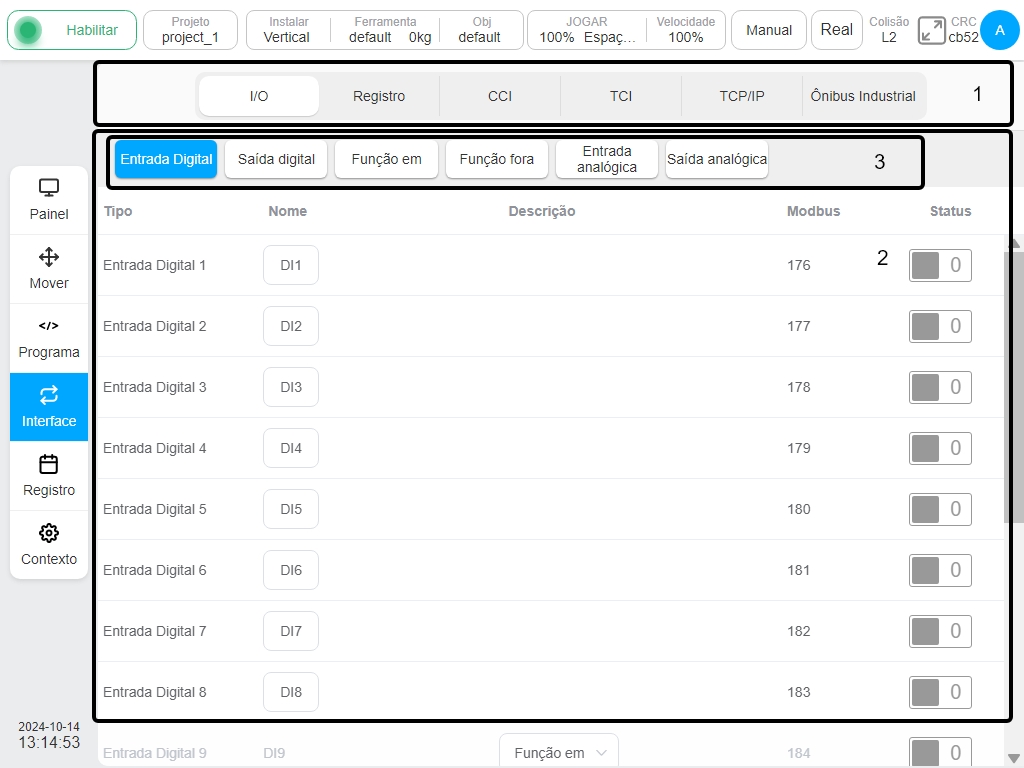
A interface de entrada geral pode monitorizar o estado e a informação básica da entrada digital normal de 16 vias no armário de controlo, como se mostra na figura. Os oito tipos de entrada digital DI9 a DI16 podem ser configurados como entrada de função ou entrada geral na coluna de descrição ① da página.
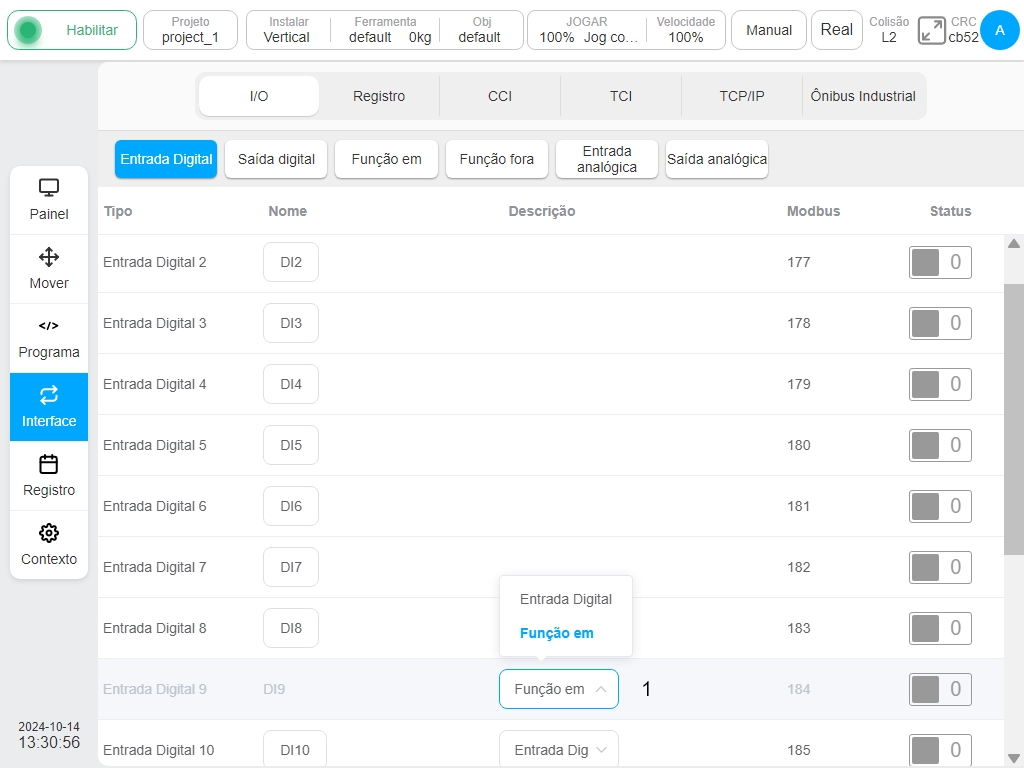
Se o utilizador selecionar cada entrada de dígito como entrada de função, o estado da entrada de dígito é desativado na página de entrada geral de E/S e o estado do dígito configurado como entrada de função é apresentado na subpágina de entrada de função. Por exemplo, se ED9 e ED10 estiverem configurados como entrada de função, a página TAB de entrada de função na subpágina de E/S é apresentada na figura seguinte.
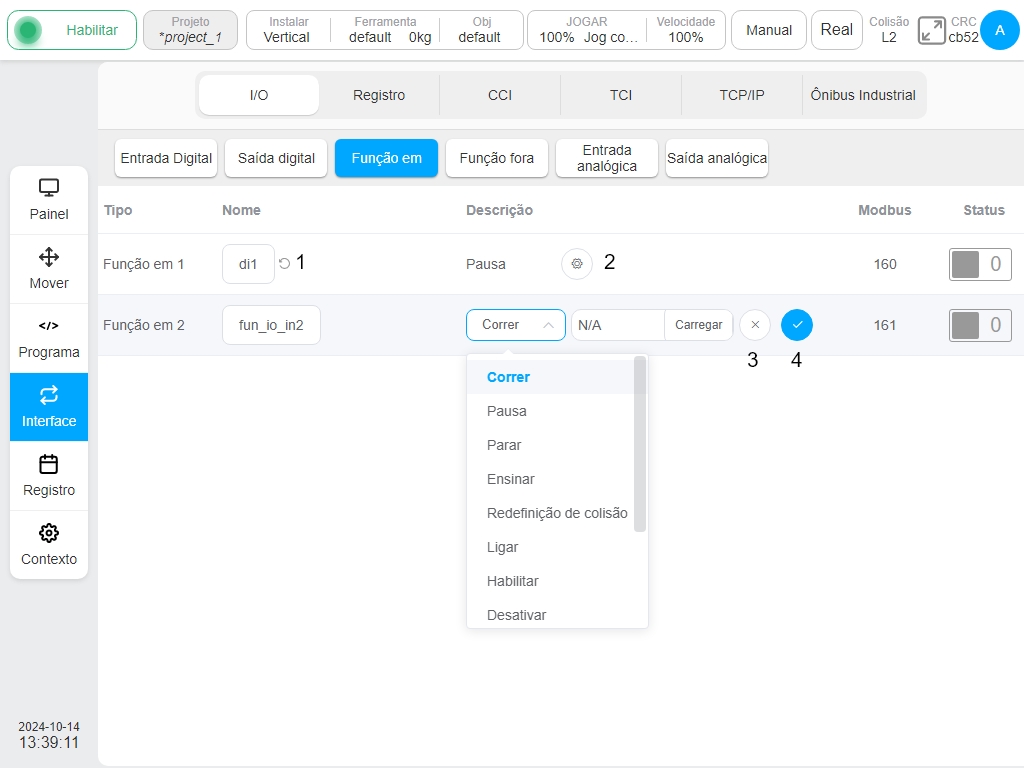
Da mesma forma, clicar no nome de uma entrada de função abrirá um teclado virtual normal, e o utilizador pode modificar o nome predefinido da entrada de função. Depois de introduzir o nome predefinido para a função modificada, o ícone ① na figura acima é apresentado à direita da caixa de apresentação do nome. Clique no ícone para restaurar o nome da entrada de função para o nome predefinido correspondente.
- Clique no ícone de entrada de função correspondente ② na figura, o seletor de definições de função, o ícone ③ e o ícone ④ serão apresentados e pode selecionar a função Definições da entrada de função. Selecione a função na caixa pendente do seletor de funções de visualização e introduza o item de função que pretende definir. Clique no ícone ④ para determinar o item de função selecionado. O utilizador também pode anular a seleção da função selecionada, clicando no ícone ③. Quando o sinal de entrada de função é acionado, a função definida é activada.
A entrada de função atual suporta as seguintes funções: Idle, Running, Paused, Finish, Disconnect profinet, Home, Collision, Auto mode, PowerOff, Disable, Robot moving, Disconnect ethernet, Robot power.
Nota
Executar, Pausa, Paragem são acionados por sinais de disparo de borda ascendente.
A interface de saída universal pode monitorizar o estado e a informação básica da saída digital normal de 16 canais no armário de controlo, como se mostra na figura. Os tipos de entrada digital DO9-DO16 podem ser configurados como entrada de função ou entrada geral na coluna de descrição ① da página.
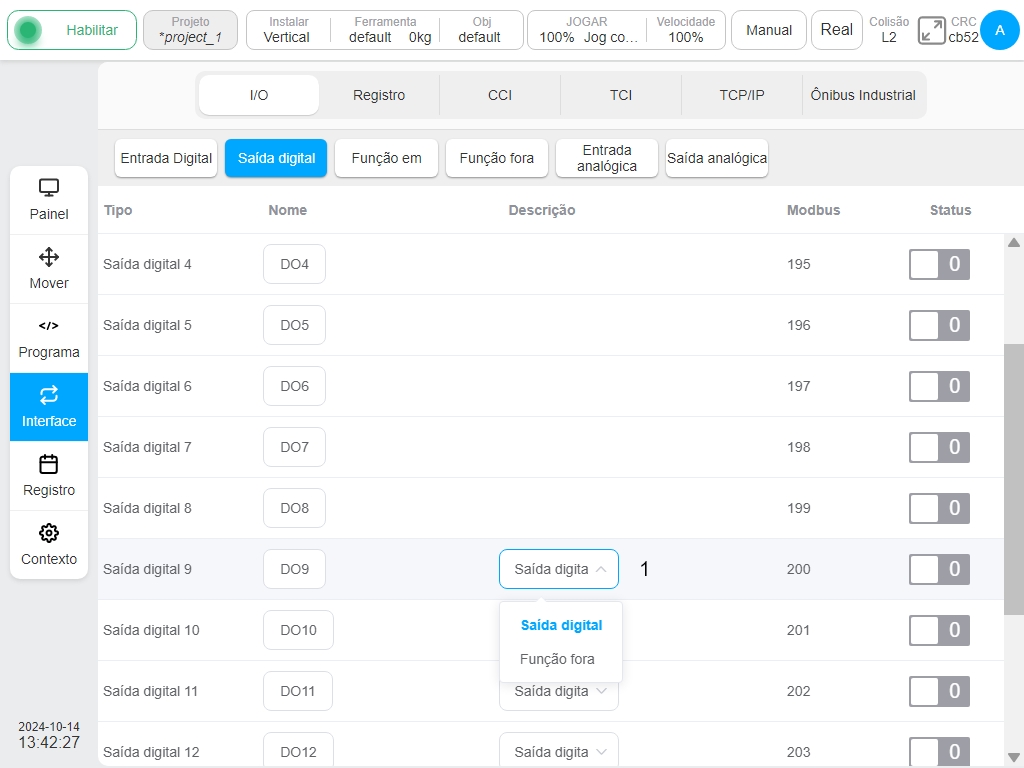
Do mesmo modo, se cada saída digital geral for selecionada como saída de função, a saída digital deste caminho é apresentada como desactivada na página Saída geral de E/S e o estado digital de cada caminho configurado como saída de função é apresentado na página da sub-guia de saída de função. Por exemplo, DO9, DO10, DO11 e DO12 estão configurados como saída de função. A figura seguinte mostra a página TAB de saída de função da subpágina E/S.
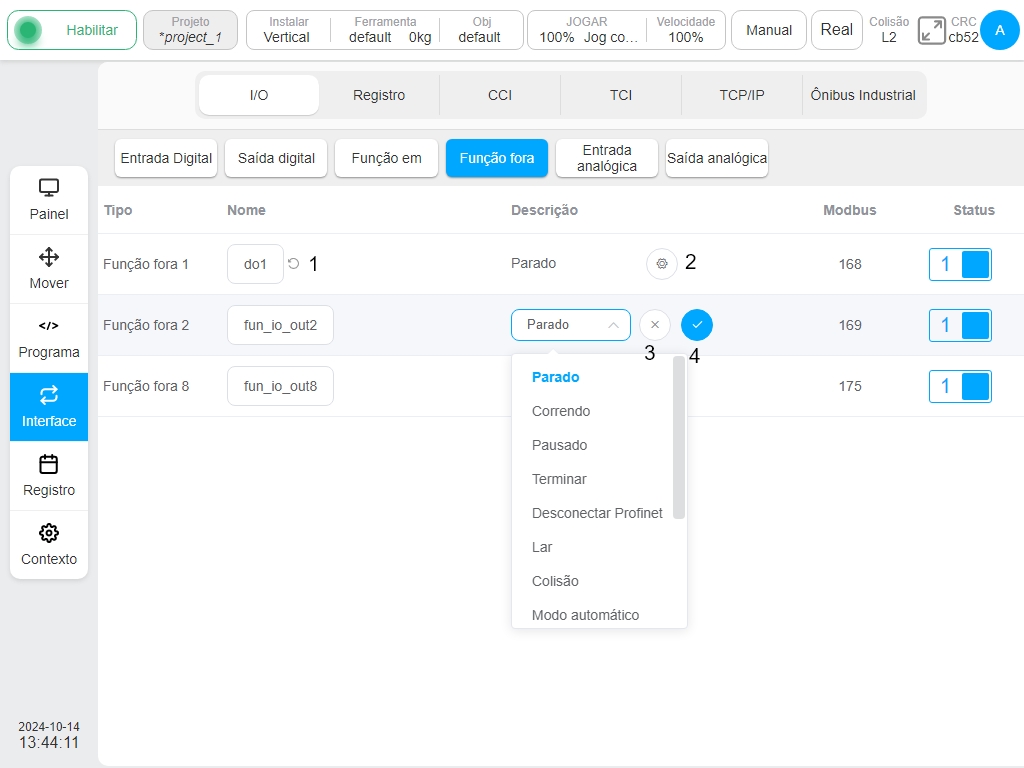
Da mesma forma que a entrada de função TAB, clique no nome da saída de função e é apresentado um teclado virtual comum. O utilizador pode alterar o nome predefinido da saída de função. Após a alteração do nome predefinido da saída de função, o ícone ① da figura acima é apresentado à direita da caixa de visualização do nome. Clique no ícone para restaurar o nome da saída de função para o seu nome predefinido.
Clique no ícone de saída de função correspondente ② na figura, o seletor de definições de função, o ícone ③ e o ícone ④ serão apresentados e as definições de função da saída de função podem ser selecionadas. Na caixa pendente do seletor de funções de visualização, selecione o item de função que a saída de função pretende definir. Clique no ícone ④ para determinar o item de função selecionado. O utilizador também pode anular a seleção da função selecionada, clicando no ícone ③. Quando o sinal de saída de função é acionado, a função definida é iniciada. Atualmente, a saída de função suporta as seguintes funções: estado inativo, estado de execução do programa, estado de pausa, fim do programa, desconexão profinet, posição Home, colisão, modo automático, não ligado, não ativado, movimento do robô, desconexão ethernet/ip, estado de alimentação 48V do robô.
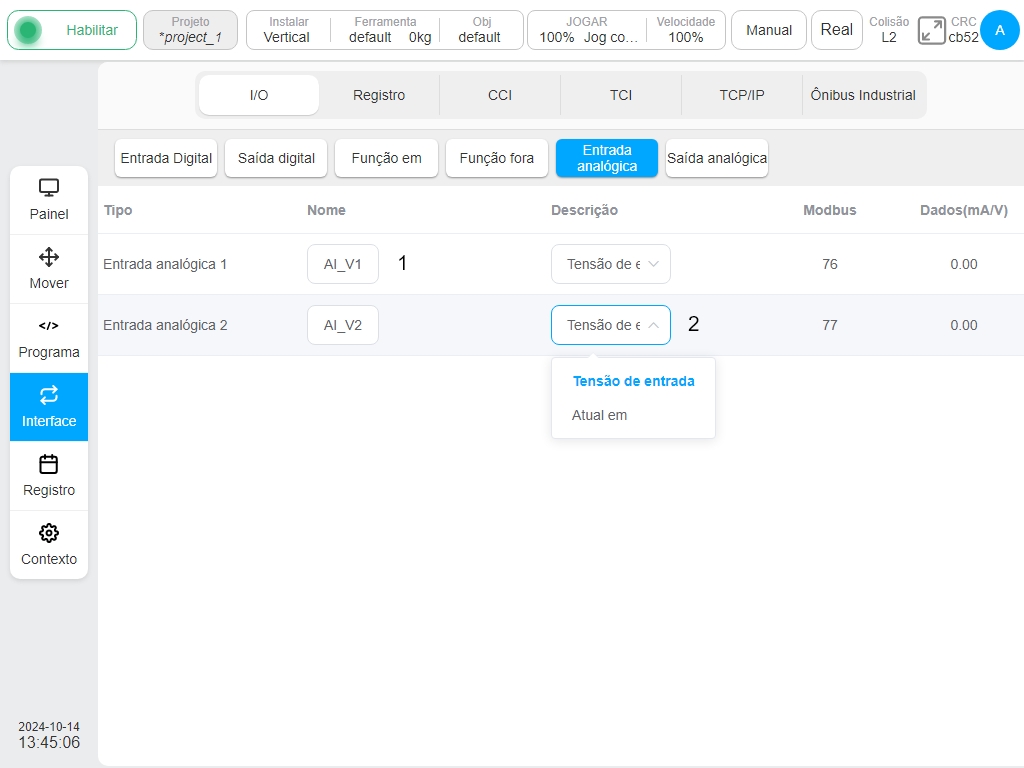
A interface de entrada analógica pode monitorizar 2 sinais de entrada analógica, como mostra a figura. Da mesma forma, clique na caixa de visualização do nome do sinal de entrada analógica para modificar o nome do sinal. Depois de modificar o nome predefinido da entrada analógica, o ícone ① na figura será apresentado no lado direito da caixa de visualização do nome. Clique no ícone para restaurar o nome da entrada analógica para o nome padrão correspondente. E o sinal de entrada analógica pode ser explicado no ícone da coluna de descrição ② para selecionar a entrada de tensão ou a entrada de corrente.
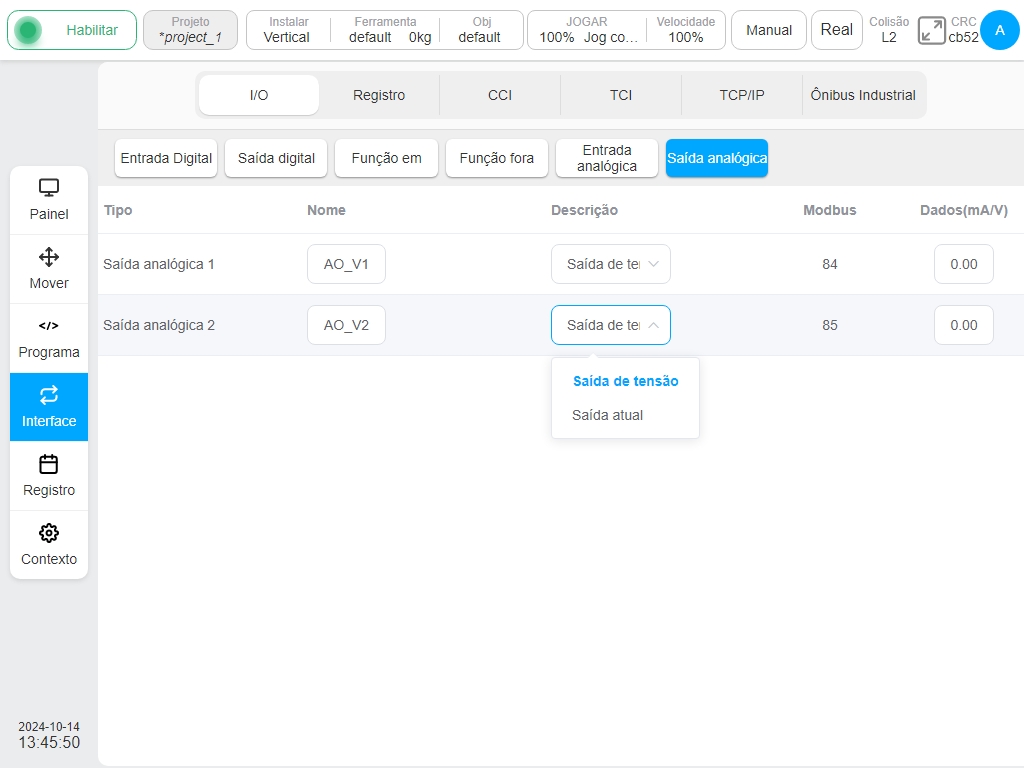
A interface de saída analógica pode monitorizar 2 sinais de saída analógica, como mostra a figura. Da mesma forma, clique na caixa de visualização do nome do sinal de entrada analógica para modificar o nome do sinal. A operação é semelhante à da entrada analógica descrita acima e não é repetida aqui. E o sinal de saída analógico pode ser explicado na coluna de descrição da seleção da configuração, o utilizador pode escolher a saída de tensão ou a saída de corrente.
Registo#
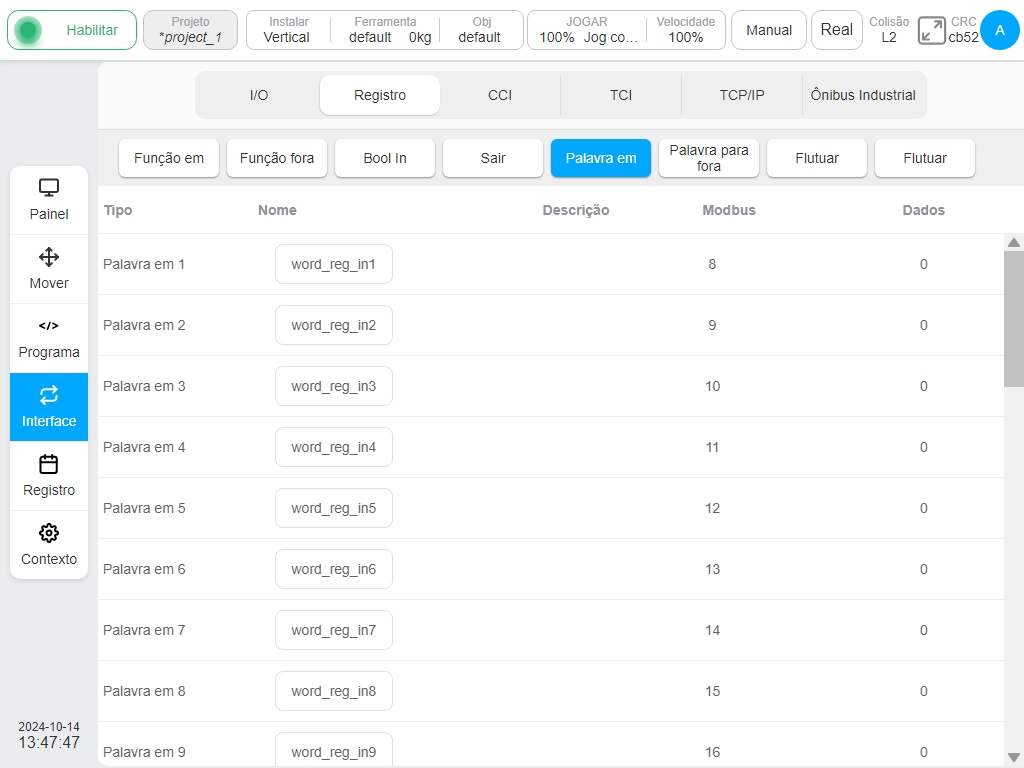
A subpágina de registo é semelhante à subpágina de E/S. A parte superior da página está identificada com diferentes tipos de entradas e saídas, que são Entradas de função, Saídas de função, Entradas Bool, Saídas Bool, Entradas de palavra, Saídas de palavra, Entradas e saídas de flutuação, num total de 8 tipos. Clique nos diferentes separadores para mudar a visualização dos oito tipos de informação de dados de entrada ou de saída.
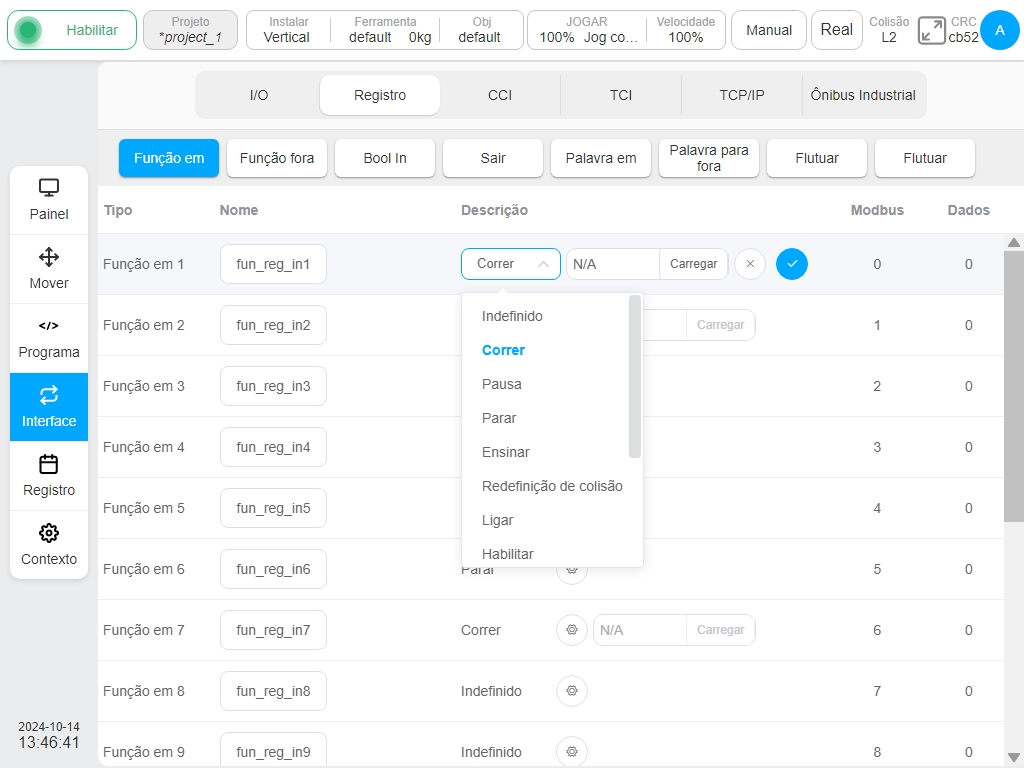
A interface de entrada de função de registo pode monitorizar a informação de estado de 16 registos de entrada de função dentro do robô, como se mostra na figura. Tal como a entrada de função da subpágina E/S, o nome da entrada de função pode ser modificado e restaurado após a modificação e podem ser definidos itens de função específicos para este tipo de sinal de registo. Os itens de função atualmente suportados pela entrada de função de registo são os mesmos que as funções de suporte de entrada de função na subpágina de E/S acima.
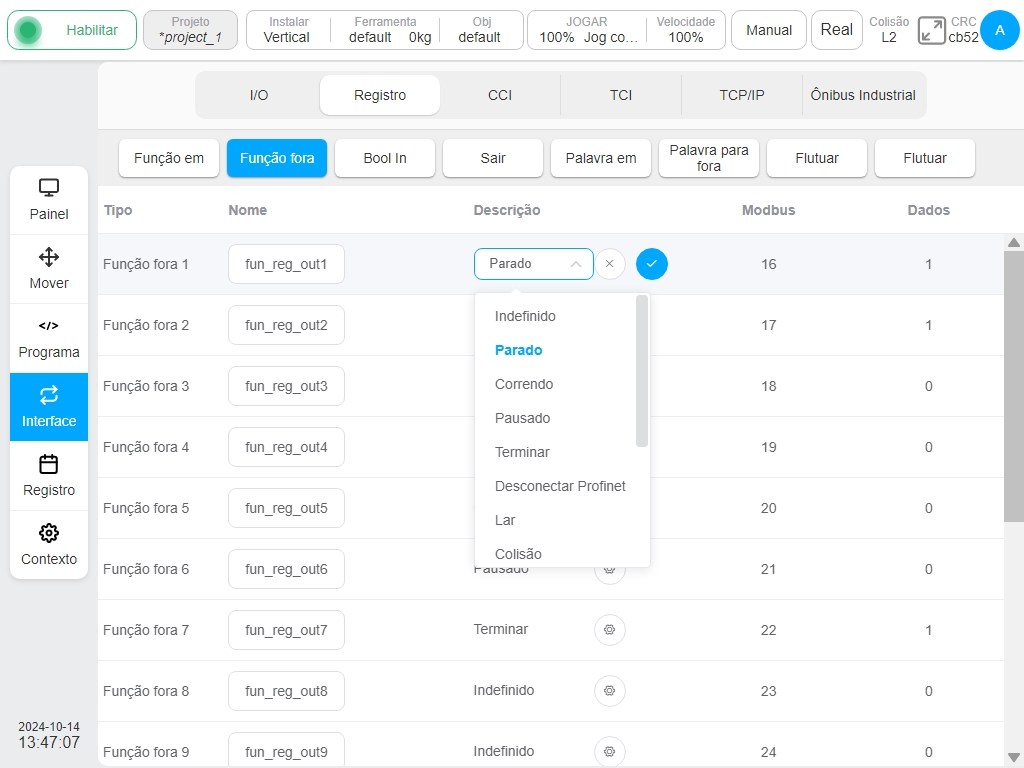
A interface de saída da função de registro pode monitorar as informações de status de 16 registros de saída de função dentro do robô, conforme mostrado na figura. Como a saída da função da subpágina de E/S, o nome da saída da função pode ser modificado e restaurado após a modificação, e o sinal do registro de classe pode ser vinculado a uma quantidade de estado predefinida do sistema específico. Atualmente, os estados de ligação suportados pela saída da função de registro são: Ocioso, Em execução, Pausado, Concluir, Desconectar profinet, Casa, Colisão, Modo automático, Desligar, Desativar, Robô em movimento, Desconectar ethernet, Energia do robô, Manuseio, Mover Abortado.
Nota
O sinal Move Task Aborted só será verdadeiro quando o robô estiver executando uma tarefa de movimentação e a tarefa de movimento for abortada por um comando de anulação da tarefa de movimentação da entrada de E/S da função, entrada de registro de função ou outra interface. O sinal Move Task Aborted só pode ser redefinido por meio da redefinição da entrada de E/S da função ou da entrada do registro de função, que é configurada como a fonte do comando move task abort, e a saída do registro de função é redefinida como baixa ao mesmo tempo.
Interface de registo de entrada booleana Apresenta a informação de estado de 64 registos de entrada booleana. A interface pode modificar e restaurar o nome do registo após a modificação, mas não pode definir itens de função específicos.
Interface de registo de saída Bool Apresenta a informação de estado de 64 registos de saída Booleana. Da mesma forma, a interface só pode modificar e restaurar os nomes dos registos após a modificação e não pode definir itens de função específicos.
A interface de entrada de registos Word e a interface de entrada Float apresentam, respetivamente, informações sobre o estado dos registos de entrada do tipo 32 bytes e do tipo 32 pontos flutuantes. Só podem modificar o nome do registo e modificar a recuperação, não têm a função específica de definição e não podem operar a caixa de visualização de dados da coluna de dados.
A interface de saída de registo Word e a interface de saída Float apresentam a informação de estado do registo de saída do tipo 32 bytes e do registo de saída do tipo 32 pontos flutuantes, respetivamente. À semelhança da interface de saída do registo Bool, podem modificar o nome do registo e restaurá-lo após a modificação e também podem operar a caixa de visualização de dados da coluna de dados.
CCI#
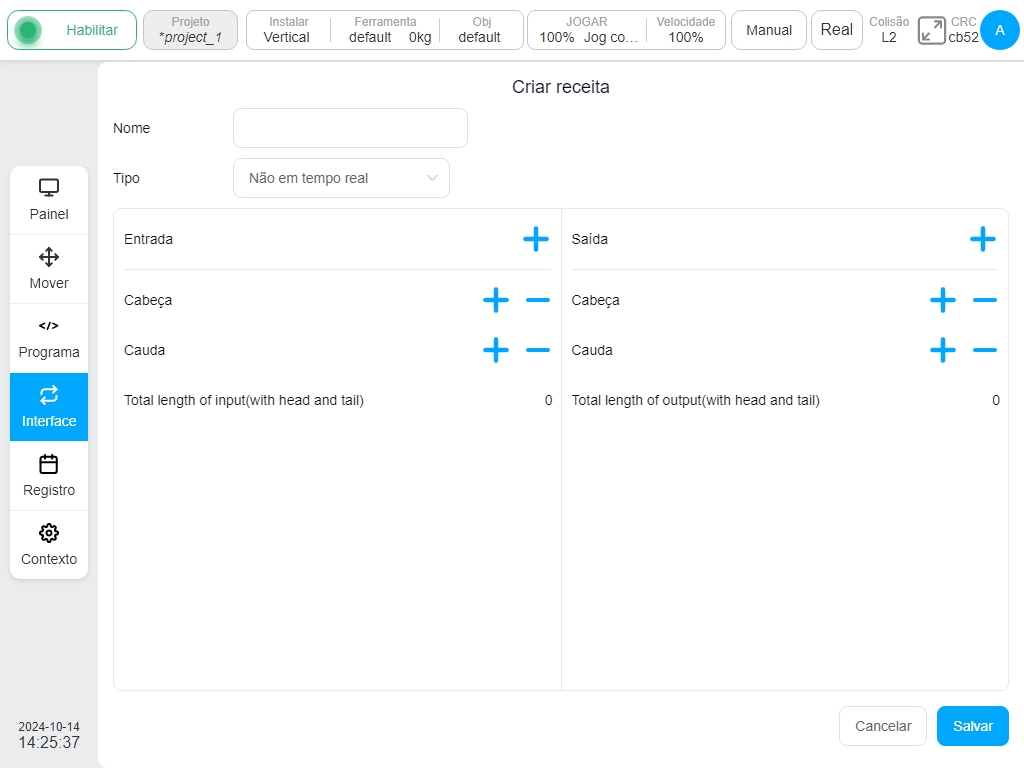
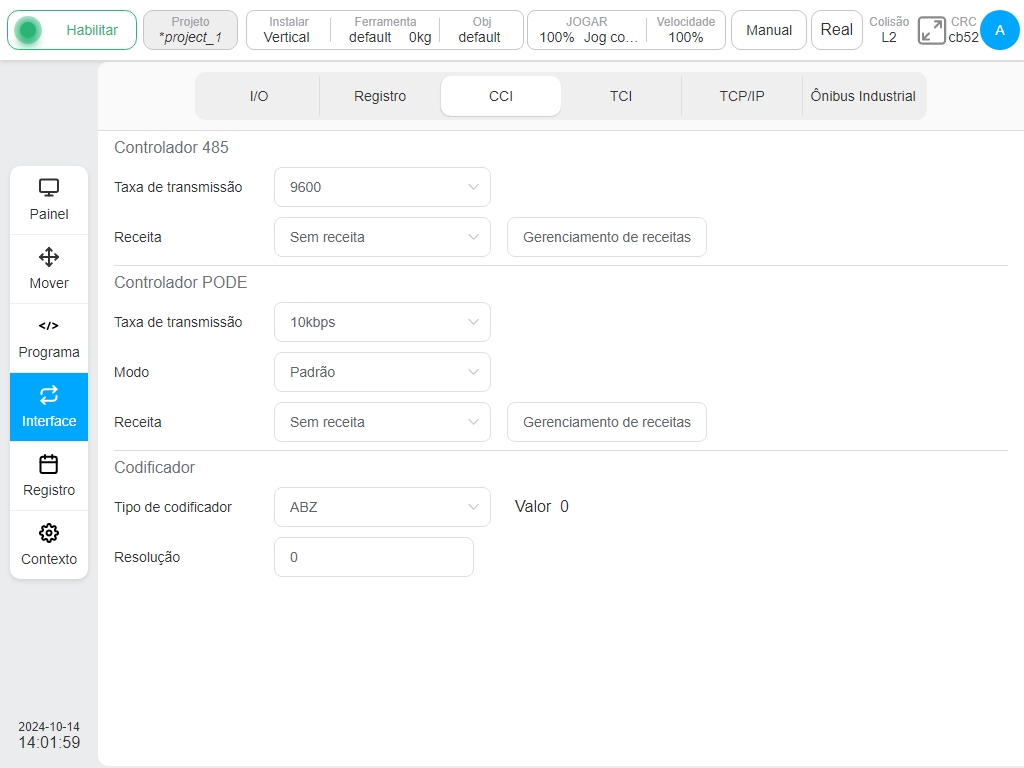
A subpágina CCI destina-se a configurar a porta 485, a porta CAN e a interface do codificador do armário de controlo, principalmente para definir a taxa de transmissão e a configuração do modo, a fórmula e o tipo de codificador da porta 485 e da porta CAN do armário de controlo. Como indicado na figura.
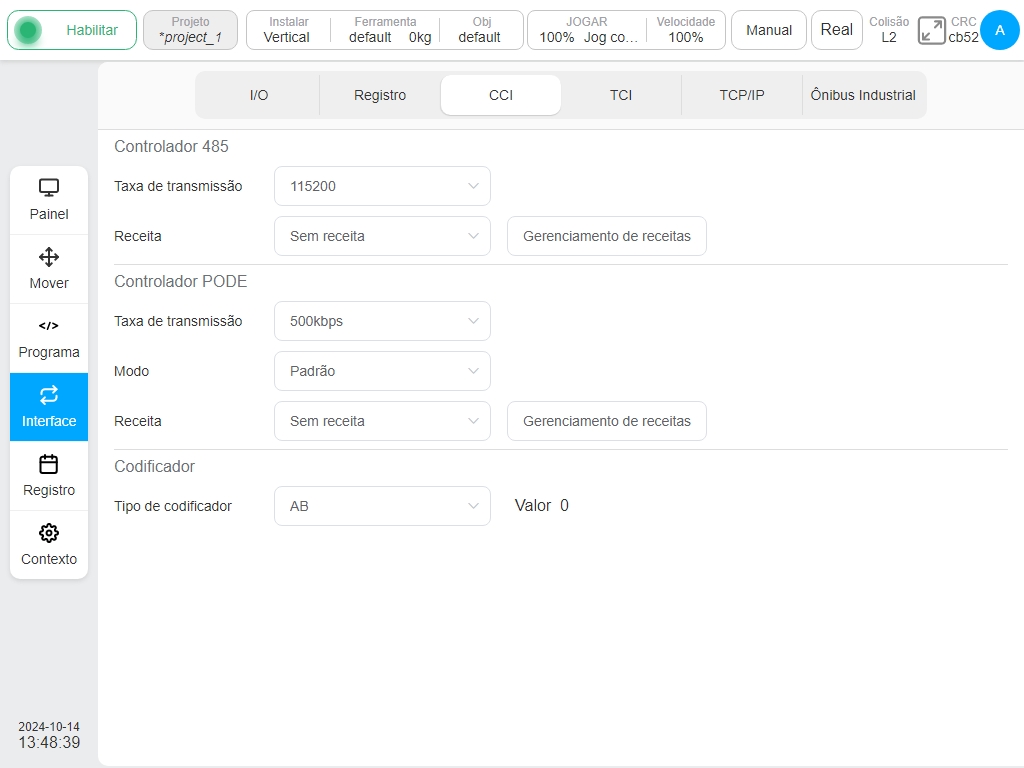
A taxa de baud para a porta 485 do armário de controlo pode ser selecionada na lista pendente do seletor de taxa de baud. A porta 485 suporta taxas de transmissão de 9600, 19200, 38400, 57600 e 115200. Selecione o ficheiro de fórmula para a porta na caixa pendente do seletor de fórmula.
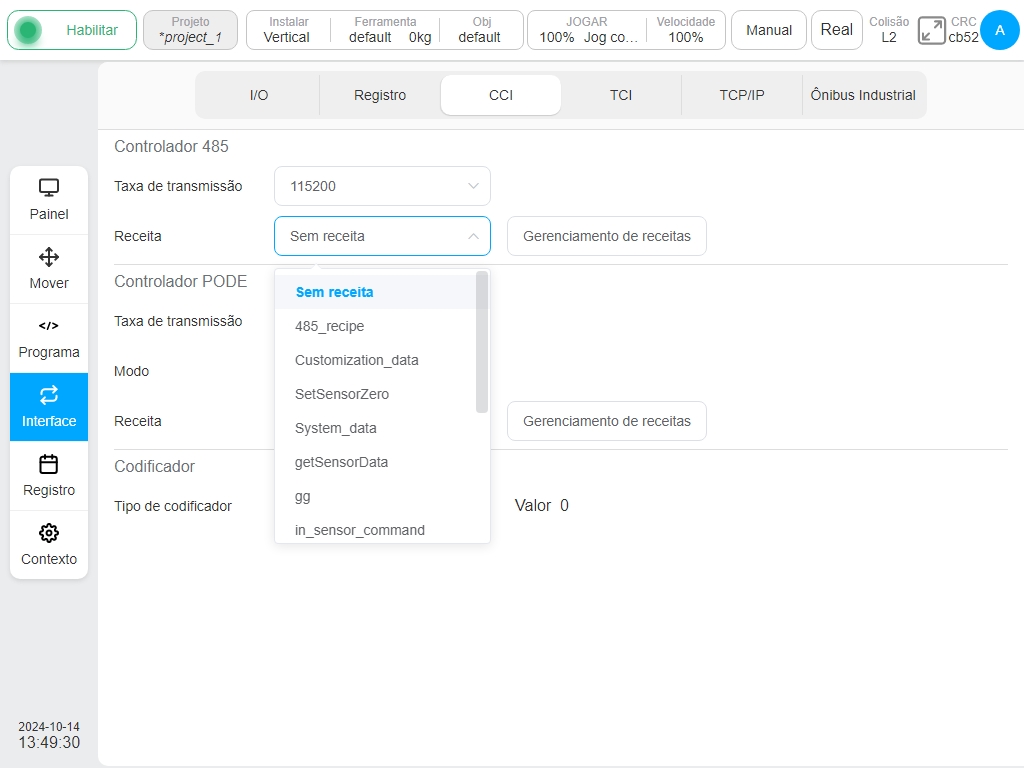
Como mostra a imagem acima, a caixa pendente apresenta o nome do ficheiro da fórmula definido pelo utilizador. Clique no botão «Gestão de fórmulas» e aparece a caixa de listagem de gestão de fórmulas. A interface apresenta os ficheiros de fórmulas existentes no projeto atual. Os utilizadores podem adicionar, apagar e editar a fórmula.
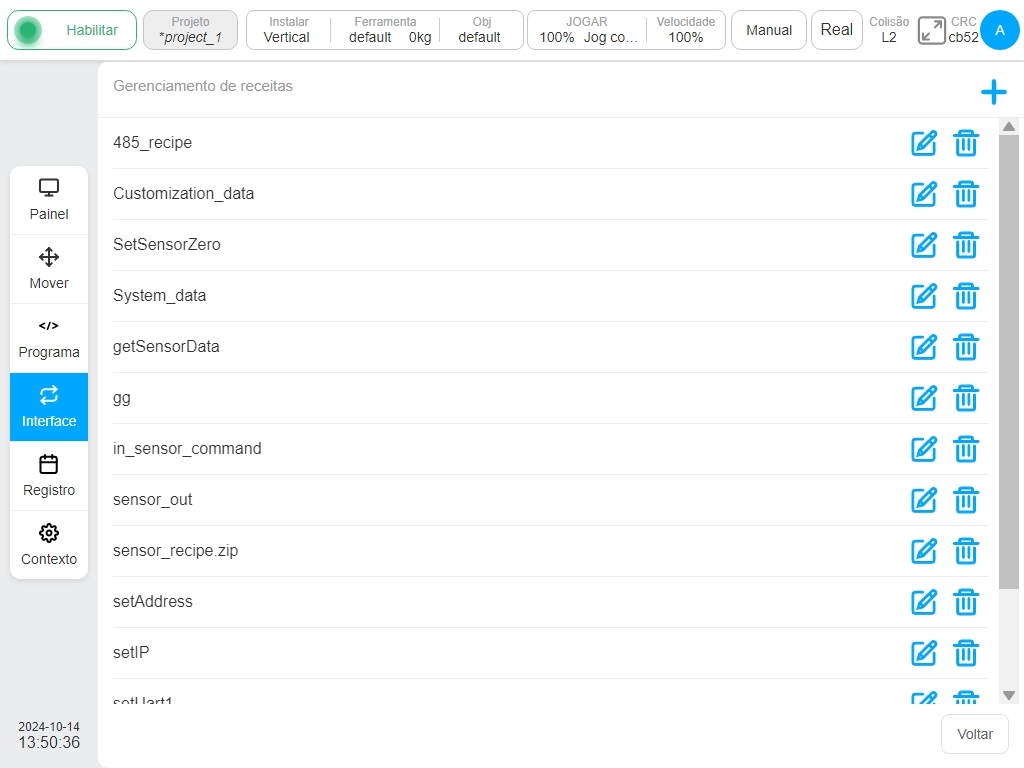
Clique em qualquer ficheiro de receita na lista de receitas e será apresentada uma caixa emergente com os botões «Editar» e «Eliminar» no lado direito. Os utilizadores podem modificar ou eliminar o ficheiro de receita existente.
As definições da taxa de transmissão e da fórmula da porta CAN do armário de controlo são semelhantes às da porta 485 e não são discutidas aqui. As taxas de transmissão das portas CAN são 10kbps, 20kbps, 50kbps, 100kbps, 125kbps, 250kbps, 500kbps e 1000kbps. Existem dois modos de configuração do CAN: quadro padrão e quadro alargado.
Existem dois tipos de configurações de codificadores de armário de controlo, nomeadamente AB e ABZ. O número de impulsos do codificador registados pelo sistema atual é apresentado no lado direito do codificador. Se o tipo de codificador estiver definido para ABZ, o utilizador também tem de definir o número de linhas do codificador. O valor predefinido é 0.
TCI#
- A subpágina TCI apresenta as informações de E/S da placa terminal e as informações relacionadas com a interface reutilizável. A placa terminal tem entradas de ferramentas de 2 canais e saídas de ferramentas de 2 canais, que são as mesmas que os sinais de entrada/saída de uso geral na sub-página I/O. Esta interface permite ao utilizador modificar os nomes das entradas e saídas de ferramentas e repor os nomes predefinidos após a modificação.
O utilizador pode configurar o modo de saída da ferramenta, e o modo de configuração da saída da ferramenta de 2 canais será forçado a ser unificado, ou seja, configurar qualquer modo de saída da ferramenta para o modo PNP ou NPN, e o outro modo de saída da ferramenta será alterado em conformidade. O utilizador pode também definir o estado da saída da ferramenta, 0 significa eletrónica de baixo nível e 1 significa eletrónica de alto nível, como mostra a figura.
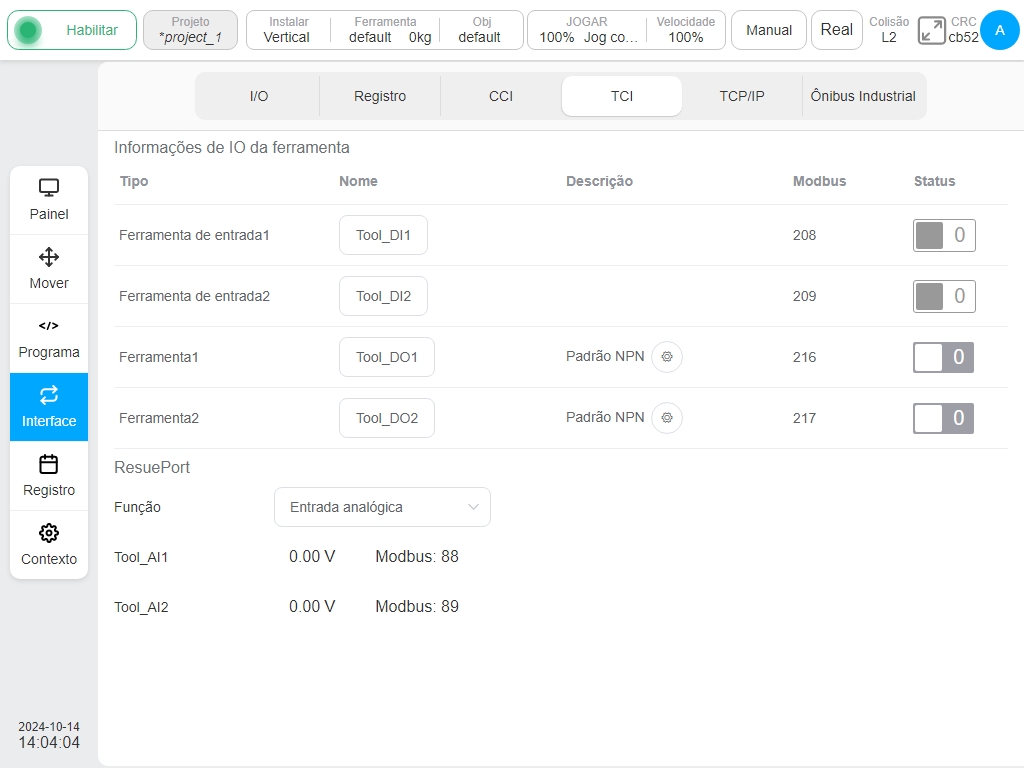
Antes da utilização, o utilizador pode configurar a função da interface do terminal como entrada analógica ou interface 485 e obter o sinal correspondente de acordo com a configuração. Como mostra a figura acima, quando a função de interface do terminal está definida para entrada analógica, a interface apresenta os dados das duas entradas de tensão analógica e os endereços Modbus correspondentes em tempo real. Se a interface de terminal estiver definida para 485, a interface apresenta a taxa de transmissão e as informações de configuração da fórmula, como mostra a figura seguinte.
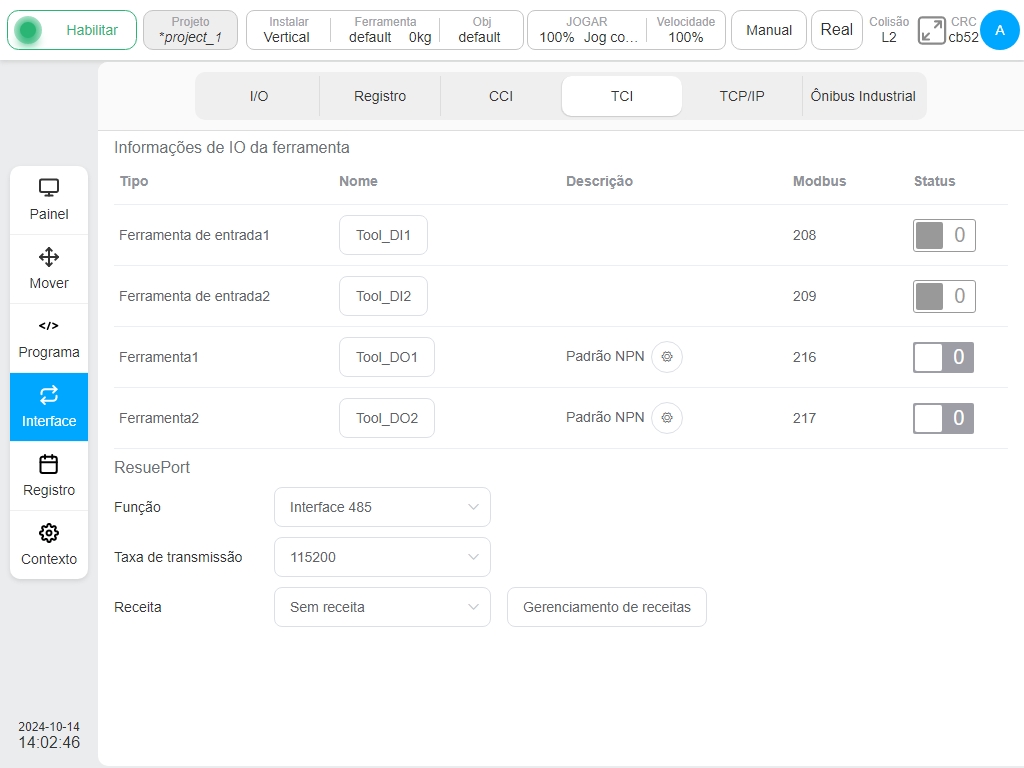
A taxa de baud e a fórmula podem ser definidas na interface 485 final. A operação específica é semelhante à definição da porta 485 do armário de controlo na subpágina CCI, que não é discutida aqui.
TCP/IP#
- A subpágina TCP/IP mostra principalmente a informação da ligação TCP/IP externa do robot.
Contém principalmente três sub-guias: Rede predefinida, Servidor personalizado e Cliente personalizado.
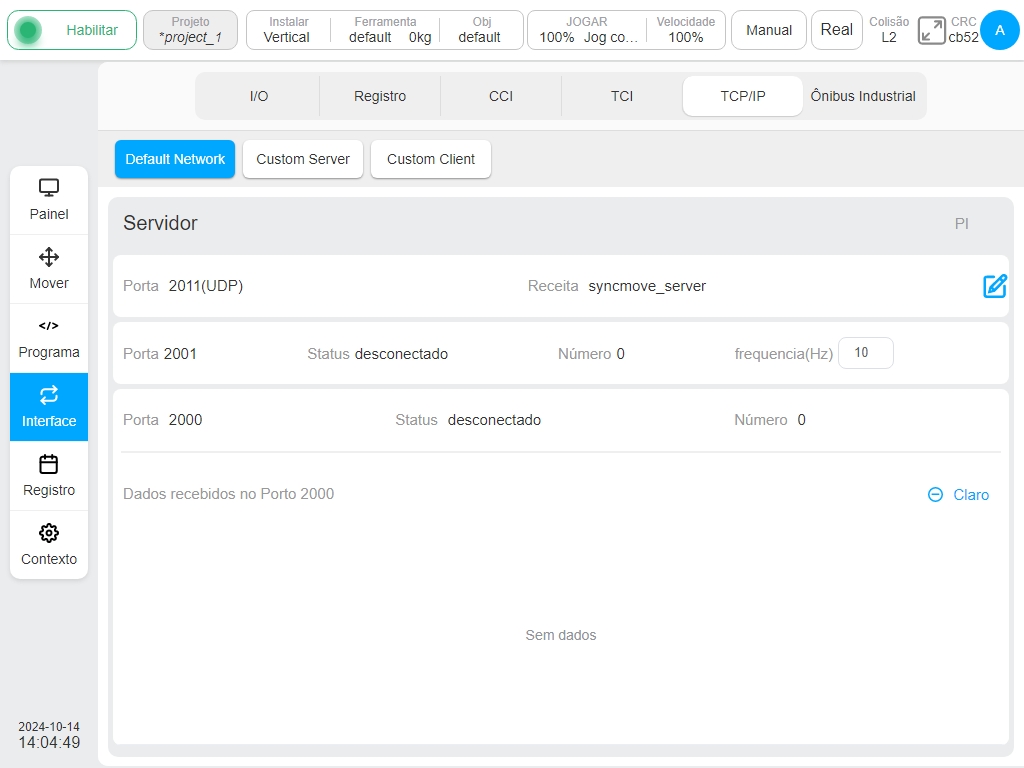
- A página da subguia de rede padrão exibe informações sobre as portas 2000, 2001 e 2011 como um servidor.
Apresenta o estado da ligação e o número de ligações para as portas IP do sistema, 2000 e 2001.
Nota
O endereço IP apresentado no servidor corresponde ao endereço IP do ponto de rede LAN1. Para obter informações sobre as definições de endereço da LAN1, consulte «Definições de rede».
A porta 2000 pode receber os comandos de controlo do robot. A informação recebida pela porta 2000 é apresentada na parte inferior da página.
Por predefinição, a porta 2001 enviará a informação do estado atual do robô a uma frequência de 10Hz, a frequência pode ser definida e o intervalo é de 1hz-100hz
A porta 2011 é uma porta UDP que permite controlar o robot através de itens de dados configurados na receita.
Para mais informações sobre como utilizar as portas 2000 e 2001, consulte a Descrição das Interfaces de Comunicação Externa para robôs colaborativos.
Para mais informações sobre como utilizar o Porto 2011, consulte as instruções da receita.
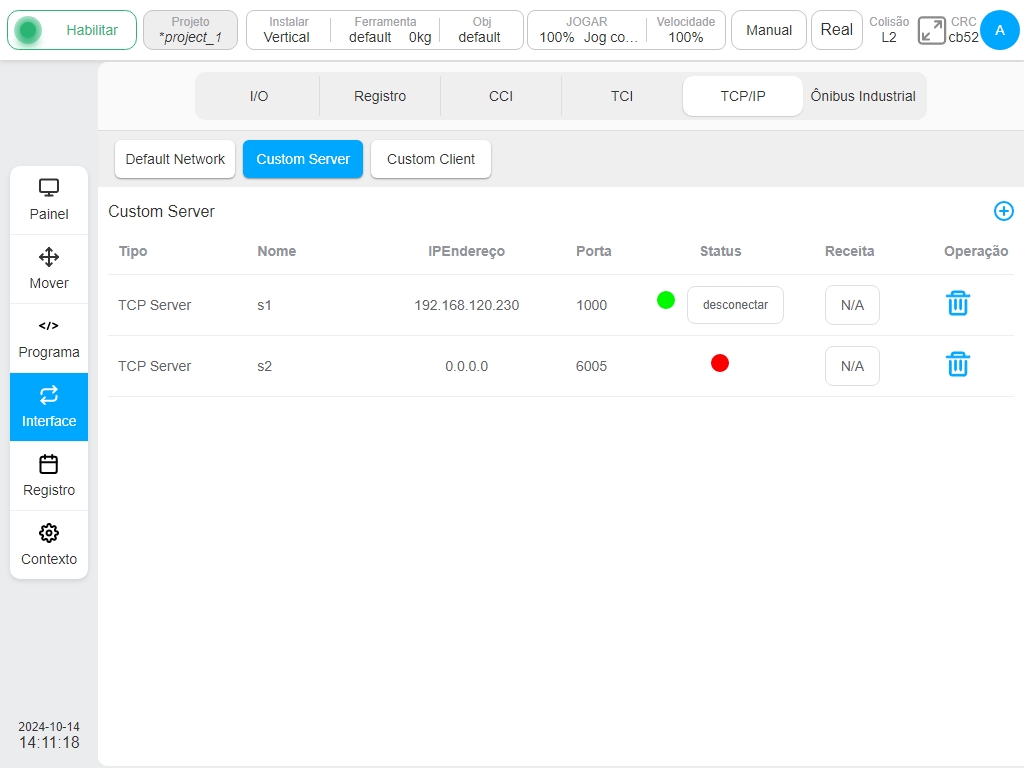
- A sub-guia Servidor personalizado apresenta a lista de servidores de socket criados pelo utilizador, incluindo o tipo de servidor personalizado, o nome, o endereço IP do cliente ligado, a porta, o estado da ligação, a receita e o ícone de operação.
Quando a luz de estado da ligação está verde, pode clicar no botão «Desligar» no lado direito da luz de estado para desligar. Clique no botão Receita para definir a receita e clique no ícone da coluna de ação
 para eliminar o servidor personalizado adicionado.
Clique no ícone
para eliminar o servidor personalizado adicionado.
Clique no ícone  no canto superior direito da página para abrir uma janela pop-up para adicionar uma ligação, introduza o nome e o número da porta e clique no botão «OK» para adicionar um servidor personalizado.
no canto superior direito da página para abrir uma janela pop-up para adicionar uma ligação, introduza o nome e o número da porta e clique no botão «OK» para adicionar um servidor personalizado.
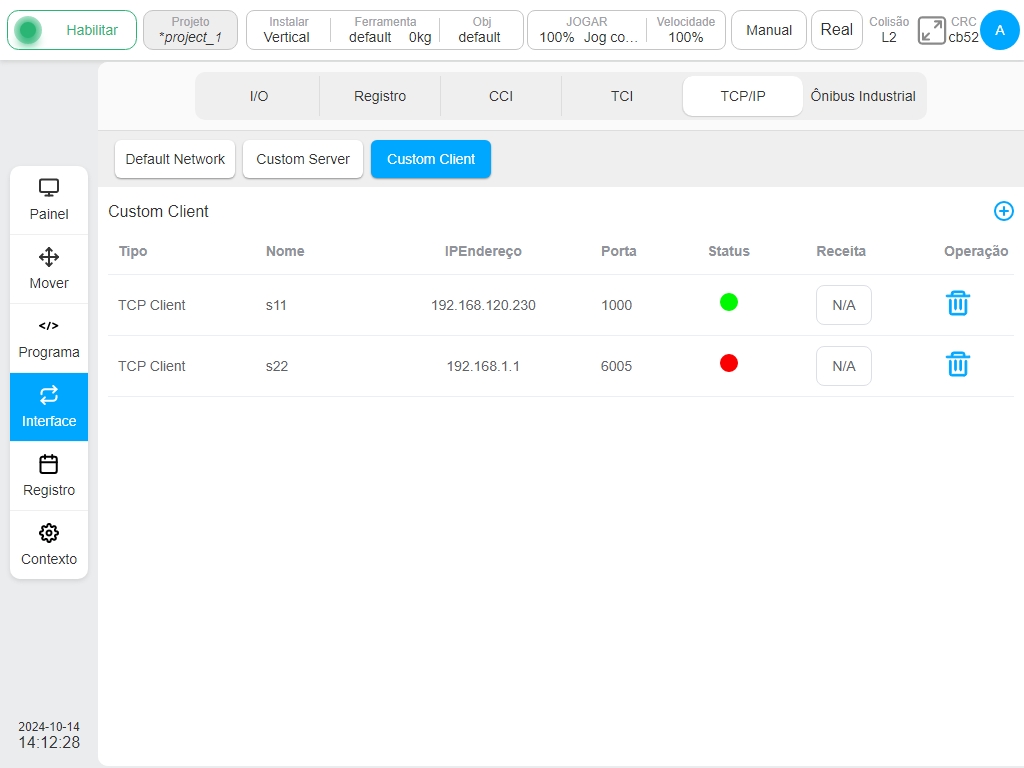
- A sub-aba Cliente Personalizado apresenta todas as informações de ligação do robô como cliente, incluindo o tipo de cliente personalizado (TCP/UDP), nome, endereço IP, porta, receita e ícone de operação.
Clique no botão Receita para definir a receita e clique no ícone da coluna de ação
para eliminar o cliente personalizado adicionado.
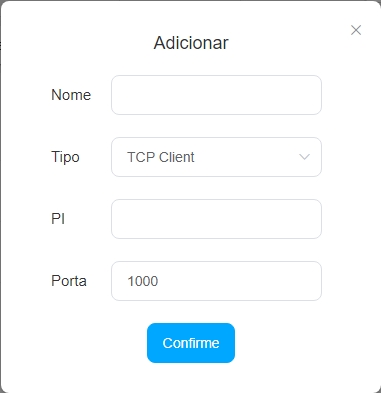
A ligação pode ser estabelecida no programa utilizando um script ou clicando no ícone no canto superior direito da página para construir.
Clique no ícone para abrir a seguinte caixa de diálogo: introduza as informações de ligação e clique no botão “OK” para criar uma ligação.
Autocarro industrial#
A subpágina de barramento industrial contém principalmente quatro subguias: Modbus TCP, Modbus RTU, Profinet, Ethernet/IP.
Usando a função Modbus TCP, o sistema do robô pode funcionar como um servidor Modbus para ouvir o comando do dispositivo cliente Modbus externo e monitorar o status da conexão quando o robô estiver ligado. O valor do registro de endereço Modbus de destino será operado com base no comando r/w do Modbus Client. Conforme mostrado na figura abaixo, as informações da conexão Modbus TCP e a operação viável são exibidas:
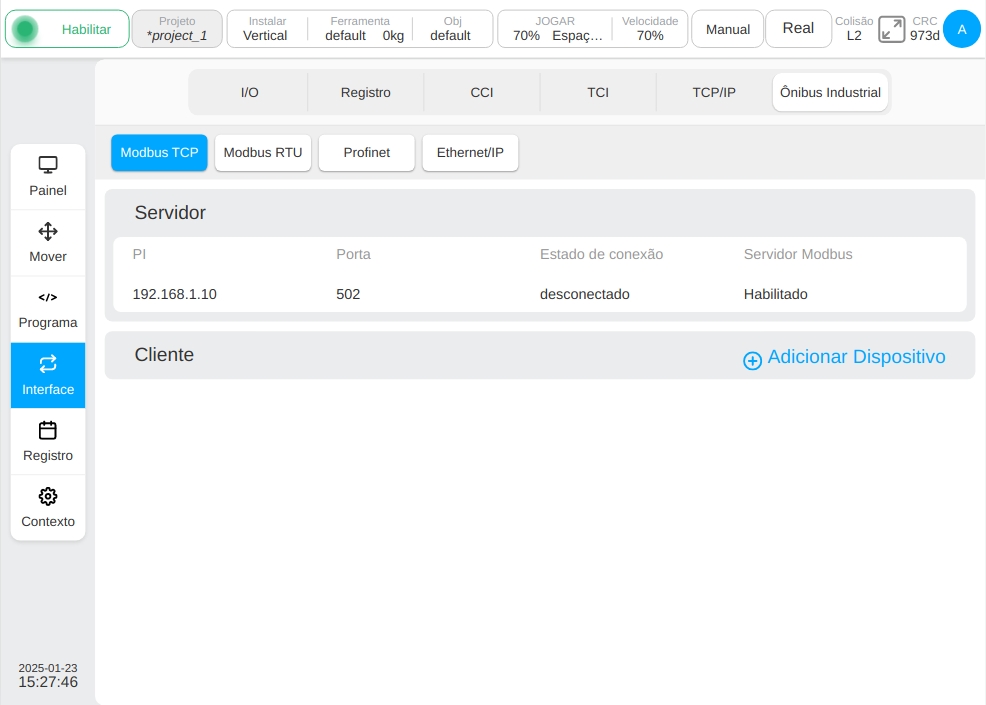
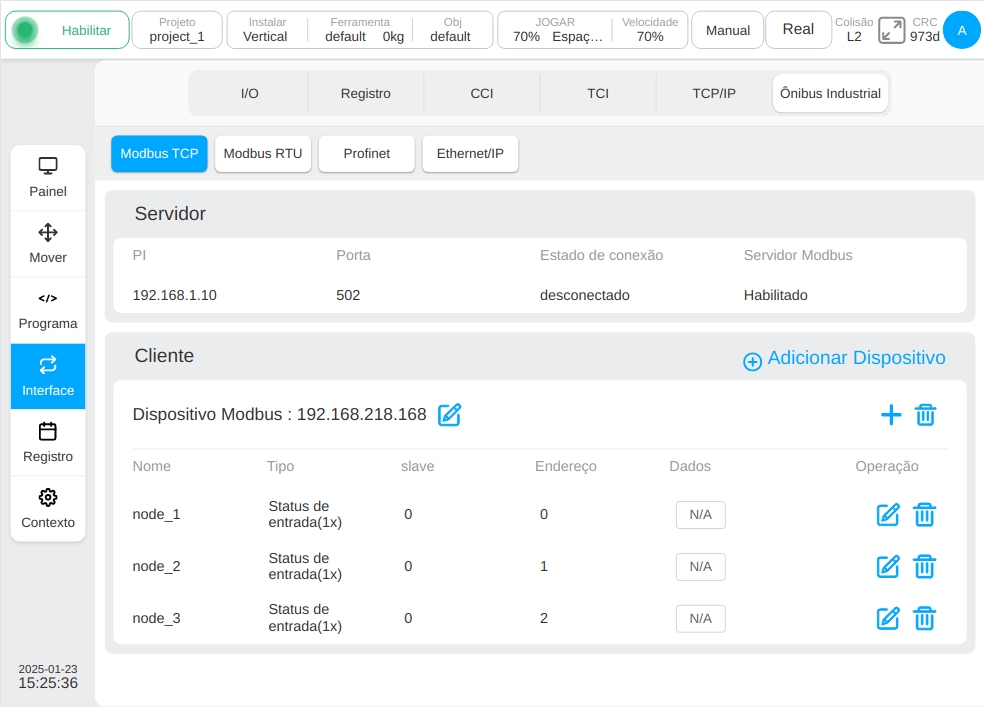
Usando a função Modbus TCP, o sistema robótico pode funcionar como um cliente Modbus para se conectar ao dispositivo externo externo do servidor Modbus. É capaz de operar o registro de endereço Modbus de destino.
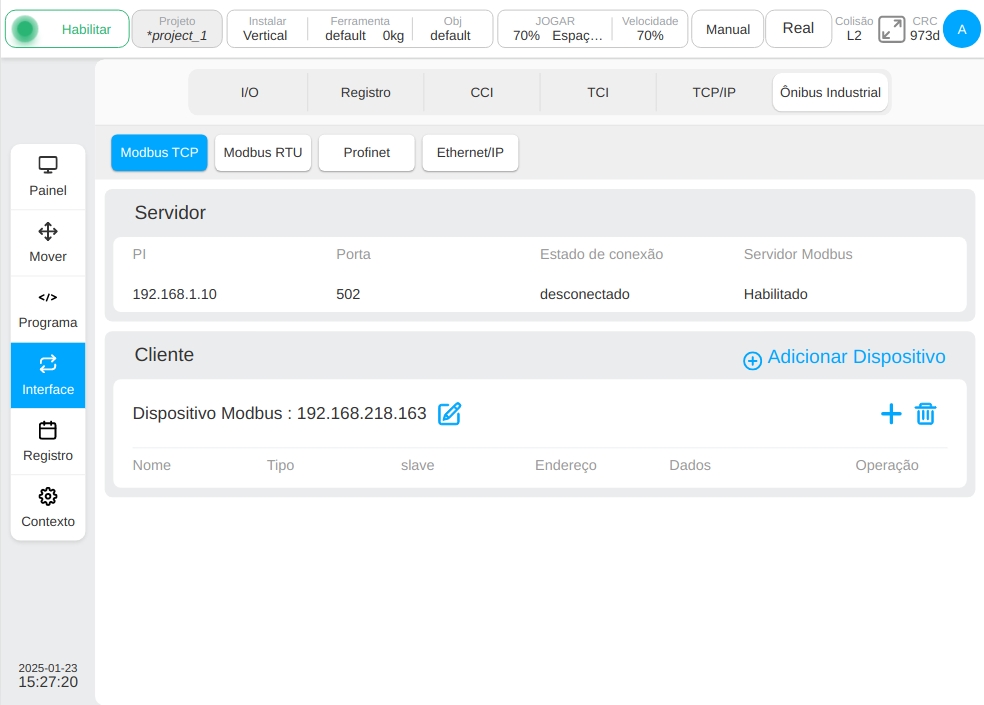
O endereço IP do sistema, o número da porta e o estado da ligação do servidor Modbus são apresentados na parte superior da interface. Clique em Adicionar dispositivo. É apresentado o teclado comum virtual. Introduza o endereço IP do dispositivo cliente Modbus externo, por exemplo, 192.168.218.163. O endereço IP do dispositivo Modbus e os respectivos ICONS são apresentados na interface.
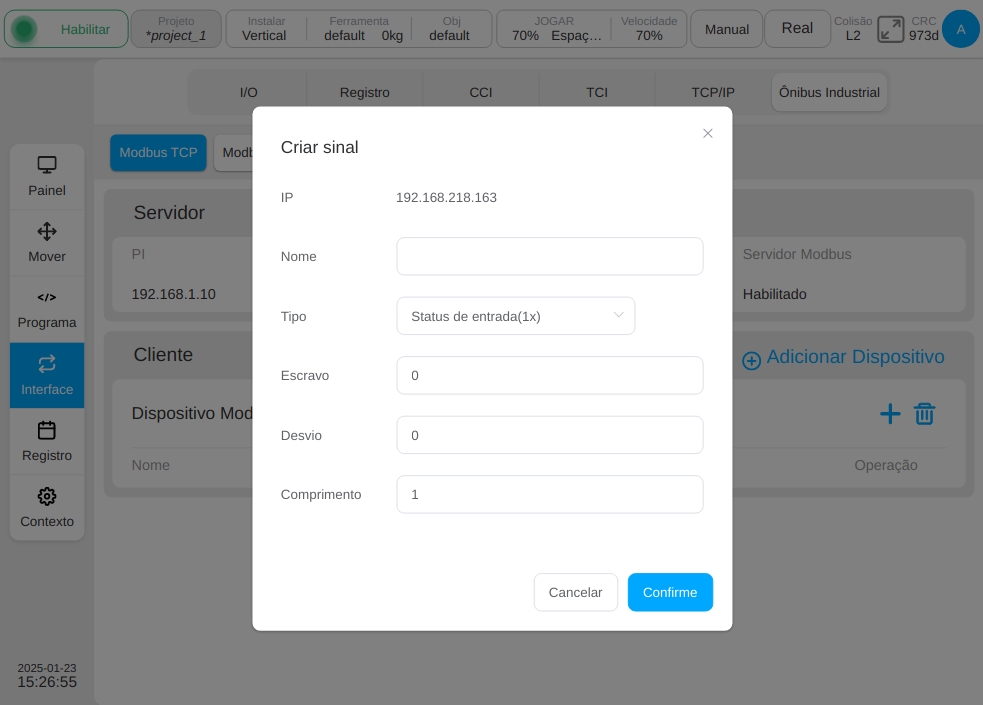
Clicar no ícone  é apresentada a janela Novo nó Modbus, como mostra a figura. Introduzir o nome do nó, o tipo de nó, o número do escravo, o endereço de offset e o comprimento,
e clique no botão «OK» para confirmar. Existem quatro tipos de nós: bobina só de leitura (1x), bobina de leitura-escrita (0x), registo só de leitura (3x) e registo de leitura-escrita (4x).
é apresentada a janela Novo nó Modbus, como mostra a figura. Introduzir o nome do nó, o tipo de nó, o número do escravo, o endereço de offset e o comprimento,
e clique no botão «OK» para confirmar. Existem quatro tipos de nós: bobina só de leitura (1x), bobina de leitura-escrita (0x), registo só de leitura (3x) e registo de leitura-escrita (4x).
Ao criar um nó, o comprimento é 1 por defeito. Quando o valor do comprimento é 1, é criado um único nó. Se o comprimento for superior a 1, são criados vários nós em lotes. Se o comprimento for definido como 3, adicione sublinhados (_) aos nomes dos nós de acordo com o comprimento, ou seja, nó_1, nó _2 e nó _3, e os endereços são 0, 1 e 2 em sequência, como mostra a figura.
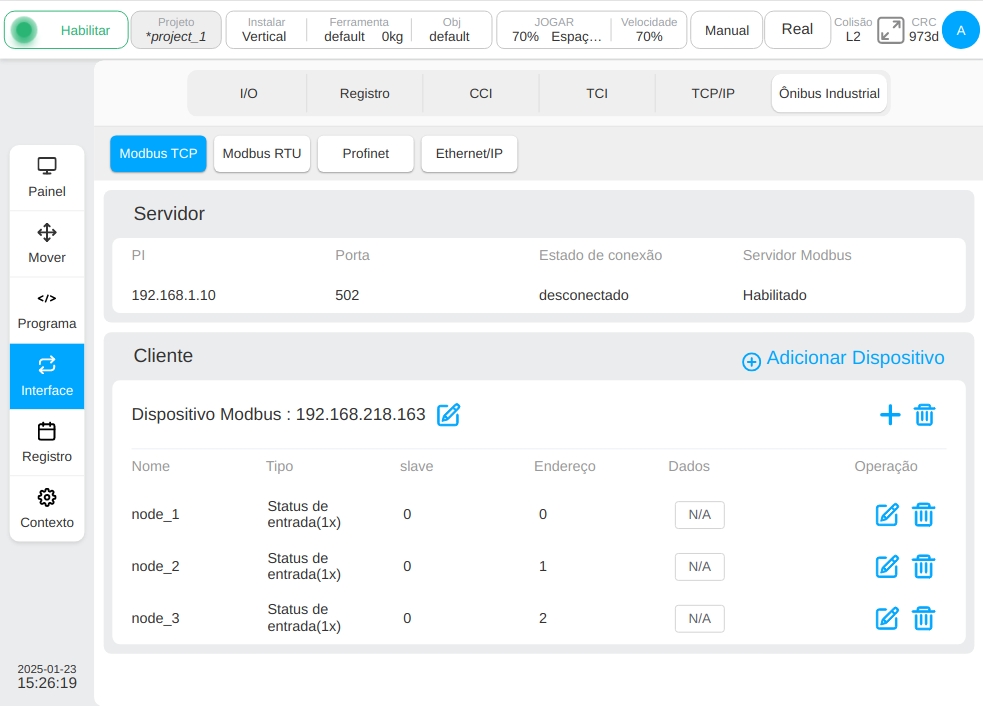
Após a criação de um novo nó, as informações sobre o novo nó definido são apresentadas na interface. Se não forem apresentados quaisquer dados na coluna de dados, é apresentado N/A.
O utilizador pode modificar ou eliminar cada nó. Clicar no botão  da linha do nó correspondente, e a janela pop-up é semelhante à da criação de um novo nó,
exceto que o nome do nó não pode ser alterado, o comprimento não é apresentado e o tipo de nó, número escravo e endereço de offset podem ser alterados.
da linha do nó correspondente, e a janela pop-up é semelhante à da criação de um novo nó,
exceto que o nome do nó não pode ser alterado, o comprimento não é apresentado e o tipo de nó, número escravo e endereço de offset podem ser alterados.
O utilizador pode alterar o endereço IP do dispositivo Modbus recém-criado, clicando no ícone a seguir ao endereço IP do dispositivo Modbus,
Introduzir o endereço IP de destino, por exemplo: 192.168.218.168. Depois de clicar no botão «OK», a interface será apresentada da seguinte forma.
Após a modificação do endereço IP de um dispositivo Modbus, as informações do nó do novo endereço IP são as mesmas que antes da modificação do endereço IP.
Usando a função Modbus RTU, o sistema do robô pode funcionar como um escravo Modbus através da interface do controlador 485 e da interface da ferramenta do robô 485 quando o robô está ligado. O dispositivo Modbus Master externo pode ler e gravar o registro através do endereço Modbus de destino.
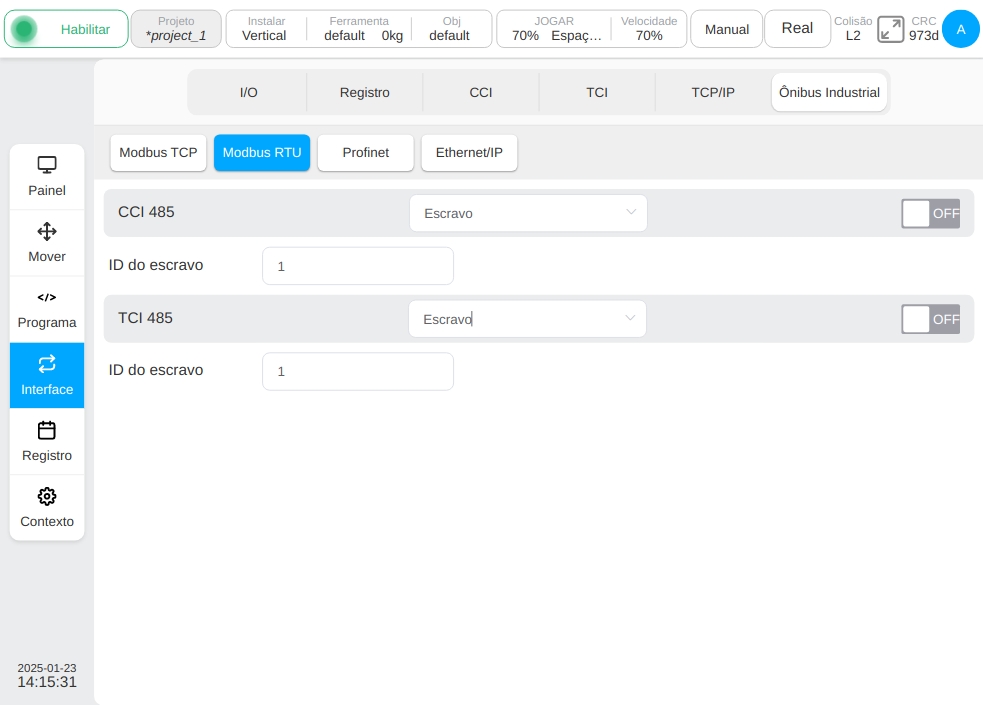
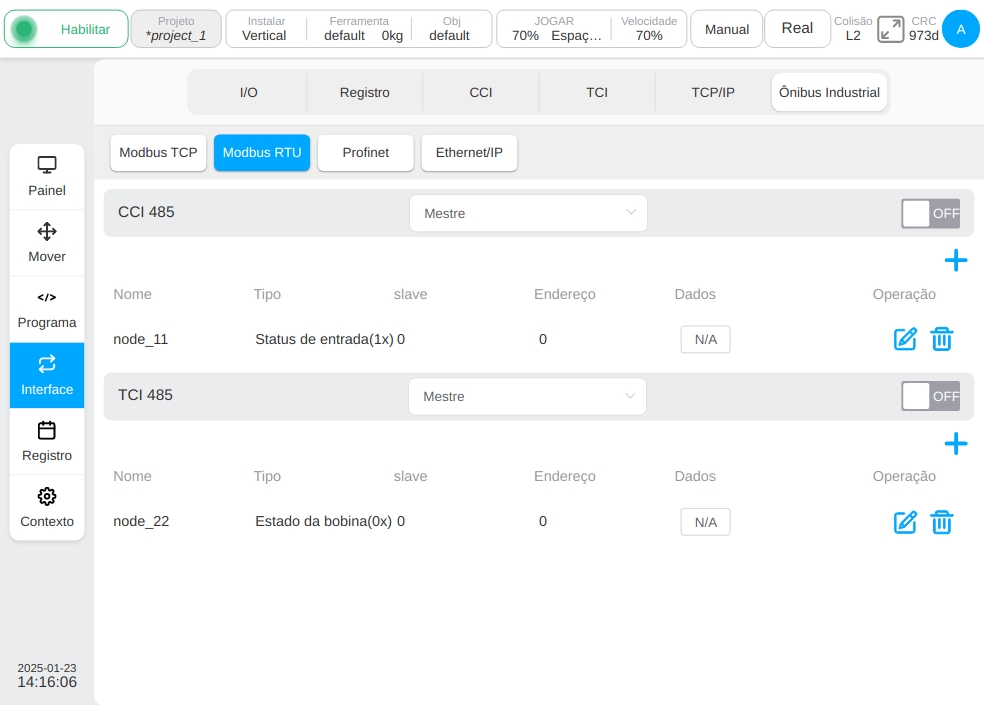
Usando a função Modbus RTU, o sistema do robô pode funcionar como um Modbus Master através da interface do controlador 485 ou da interface da ferramenta do robô 485 e conectar-se a dispositivos Modbus Slave externos quando o robô estiver ligado. É capaz de ler e gravar o registro do Modbus Slave através do endereço Modbus. Todas as operações relacionadas, como adicionar, excluir, editar e etc. aos nós Modbus, são completamente iguais às da função Modbus TCP.
Nota
After controller 485 interface or robot tool 485 interface is configured and enabled with the Modbus mode, it is not able to operate the coresponding 485 interface directly through the related scripts and functions, It is only feasible to do the read and write operation to the Modbus register through target Modbus address by using Modbus related scripts and functions.
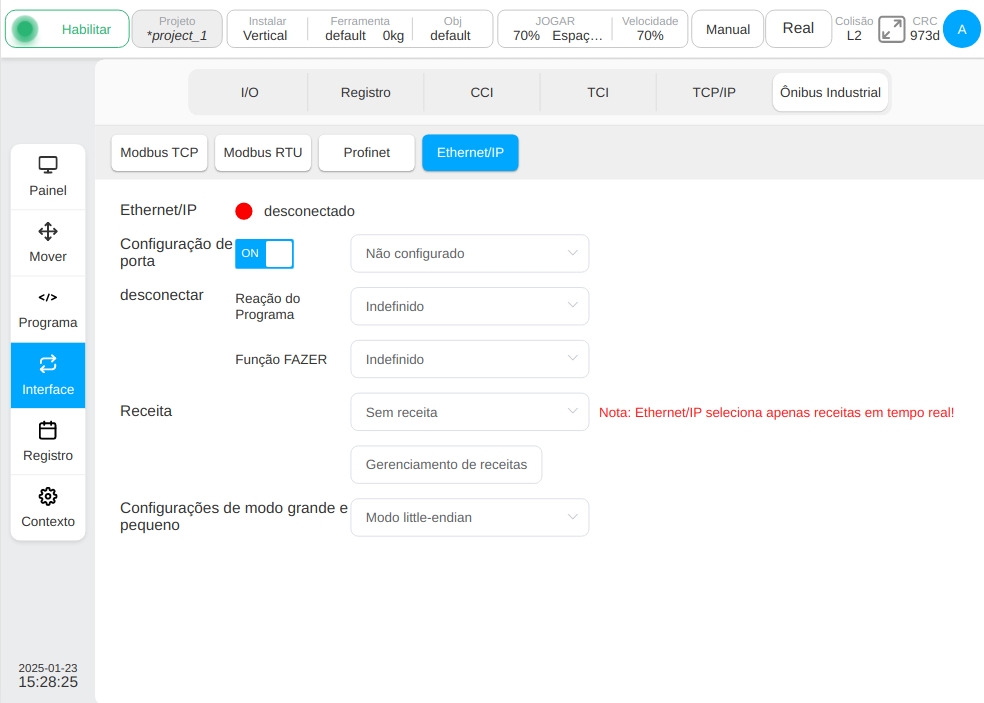
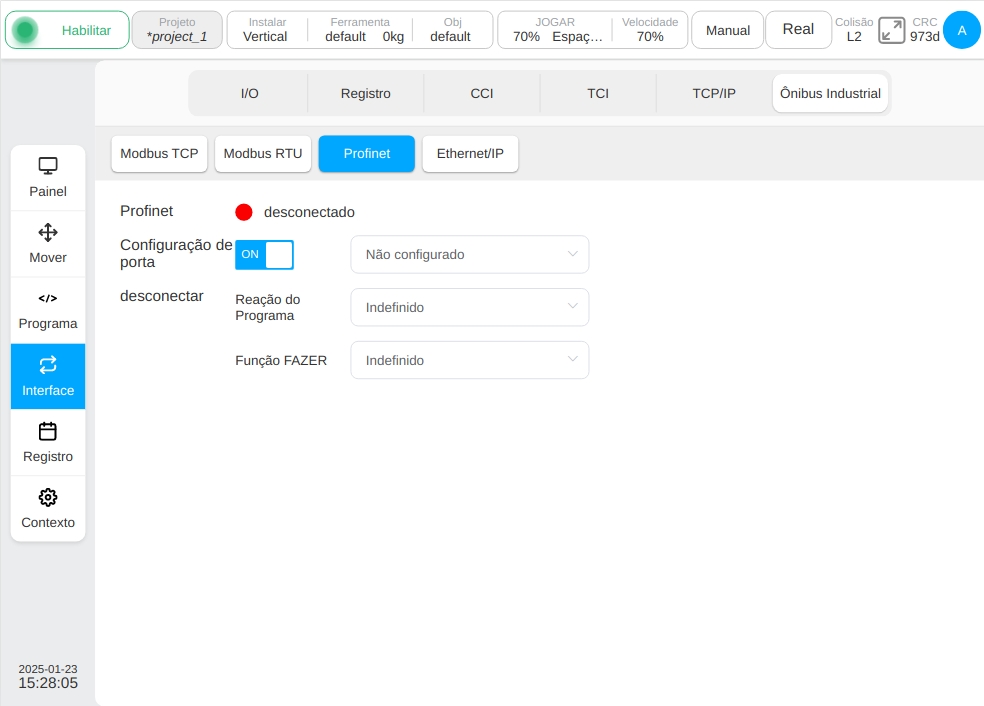
Os subtabs Profinet e Ethernet/IP são utilizados principalmente para visualizar o estado da ligação, as definições das portas e a configuração do processamento da desconexão, incluindo a ação de resposta do programa e a configuração correspondente da saída de função IO. As definições de porta incluem a ativação e a configuração do nome da porta correspondente. As opções do seletor de resposta do programa são: indefinido, programa em pausa, parar programa; As opções do seletor de saída da função DO Output incluem: indefinido e nomes de sinais de saída indefinidos na função sinal de saída na subpágina I/O. A função DO configurada para a desconexão Profinet e Ethernet/IP em cada página de sub-rótulo é sincronizada com a configuração de saída de função na sub-página de E/S.
Além disso, a subguia Ethernet/IP também pode ser usada para configuração e gerenciamento de receitas e configurações de modo grande e pequeno.
Nota
Nota: A Ethernet/IP só permite selecionar receitas em tempo real!