


Segurança#
Visão geral#
Este documento apresenta informações importantes sobre questões de segurança e avaliação de riscos que devem ser tidas em conta na instalação, utilização e manutenção do robô e dos seus componentes, que devem ser lidas e compreendidas pelo utilizador antes de o robô ser ligado pela primeira vez.
Antes de efetuar qualquer operação, certifique-se de que leu todas as instruções de utilização fornecidas com o aparelho, especialmente os perigos, avisos e precauções que podem pôr em risco a segurança do corpo humano e do aparelho, para minimizar a possibilidade de acidentes. Se este documento for diferente do documento fornecido com o aparelho, prevalece o documento fornecido com o aparelho.
O pessoal responsável pela instalação e manutenção do aparelho deve ser formado por profissionais que dominem os métodos de funcionamento corretos e todas as precauções de segurança. A instalação e a manutenção dos aparelhos só podem ser efectuadas por pessoal formado e qualificado.
Âmbito de aplicação efetivo e declaração de responsabilidade#
Esta informação não abrange a forma de conceber, instalar e operar um sistema robótico completo, nem abrange todos os dispositivos periféricos que podem afetar a segurança de todo o sistema. É necessário um sistema bem concebido para proteger a segurança do pessoal e deve ser instalado de acordo com os requisitos de segurança estabelecidos nas normas e regulamentos do país onde o robô vai ser instalado.
O integrador de robôs será responsável por garantir que o sistema de robôs cumpre as leis e regulamentos de segurança aplicáveis do país ou região em que está localizado e que o dispositivo de segurança necessário para proteger o operador do sistema de robôs está corretamente concebido e instalado.
Os pormenores incluem, mas não se limitam ao seguinte:
Assegurar que os sistemas robotizados cumprem todos os requisitos básicos;
Efetuar uma avaliação dos riscos de todo o sistema;
Assegurar a exatidão da conceção e da instalação de todo o sistema;
Introduzir definições de segurança adequadas no software e garantir que não são alteradas pelos utilizadores;
Elaborar instruções de funcionamento pormenorizadas;
Emitir uma declaração de conformidade;
Recolher todas as informações nos documentos técnicos;
Etiquetar o sistema de robô instalado com o logótipo e as informações de contacto do integrador.
DUCO Robots Co., Ltd. está empenhada em fornecer informações de segurança fiáveis e não será responsável, exceto se houver negligência intencional ou grave por parte da DUCO Robots Co., Ltd. no fornecimento de informações de segurança fiáveis. Deve ficar claro que, mesmo que tudo seja feito de acordo com uma operação segura, não há garantia de que o sistema do robô não cause danos pessoais e materiais ao utilizador.
DUCO Robots Co., Ltd. não será responsável por perdas do utilizador causadas pelos seguintes motivos:
Eventos de força maior (por exemplo, catástrofes naturais, incêndios, guerras, etc.);
Danos naturais ou desgaste do sistema do robot;
O ambiente de funcionamento do local (por exemplo, tensão, temperatura, humidade, etc.) ou factores externos (por exemplo, interferência externa, etc.) não podem cumprir os requisitos ambientais para o funcionamento normal que foram solicitados;
O sistema do robô não está instalado corretamente (incluindo a não reinstalação correta após a relocalização);
Devido a utilização intencional ou negligente por parte do Utilizador ou de terceiros, utilização inadequada (incluindo a não utilização pelo Utilizador de acordo com este manual do Utilizador e/ou outros requisitos da DUCO Robots Co., Ltd.) ou sabotagem.
Salvo acordo em contrário, DUCO Robots Co., Ltd. não será responsável por perdas indirectas, especiais ou acidentais causadas pela utilização do sistema de robôs, incluindo, mas não se limitando a, perda de receitas, perda de ganhos reais ou esperados, perda de negócios, perda de oportunidades, perda de boa vontade, perda de reputação, perda de dados, danos ou divulgação.
Avaliação dos riscos#
A avaliação de riscos é uma das tarefas mais importantes que um integrador deve efetuar. O próprio robô é uma máquina parcialmente concluída e a segurança da instalação do robô depende da forma como o robô é integrado (por exemplo, ferramentas, obstáculos e outras máquinas).
Recomenda-se que o integrador efectue a avaliação dos riscos em conformidade com as disposições das normas internacionais ISO 12100, ISO 10218-2, ISO/TS 15066 (ou das normas nacionais correspondentes, como as normas chinesas GB 15706, GB 11291.2, GB/T 36008). Os integradores que efectuam avaliações de risco devem considerar todos os procedimentos de trabalho ao longo da vida útil do robô, incluindo, mas não se limitando a:
Ensinar robôs ao desenvolver instalações de robôs;
Diagnóstico de avarias e manutenção;
Funcionamento normal da instalação do robot.
A avaliação de risco deve ser efectuada antes de o robô ser ligado pela primeira vez. Parte da avaliação de riscos realizada pelo integrador consiste em identificar as definições de configuração de segurança corretas e determinar se são necessários botões de paragem de emergência adicionais e outras medidas de proteção.
A seguir identificam-se os principais riscos que os integradores devem ter em conta. Tenha em atenção que podem existir outros riscos significativos associados a um determinado dispositivo robótico.
O dedo é colocado entre a articulação 4 e a articulação 5 do robot;
As arestas afiadas e as pontas afiadas das ferramentas ou dos conectores de ferramentas perfuram a pele;
As arestas vivas e os pontos afiados dos obstáculos próximos da trajetória do robô perfuram a pele;
Entorses ou fracturas devido ao impacto entre a carga útil do robô e uma superfície sólida;
Consequências de parafusos soltos utilizados para fixar o robot ou a ferramenta;
Os objectos caem da ferramenta (por exemplo, devido a uma fixação incorrecta ou a uma falha de energia);
Erros de funcionamento devido a diferentes botões de paragem de emergência em diferentes máquinas.
Se o robô for instalado numa aplicação de robô não colaborativa em que o risco não possa ser adequadamente eliminado utilizando as suas caraterísticas de segurança internas (por exemplo, a utilização de ferramentas perigosas), o integrador do sistema deve instalar uma proteção adicional com base na avaliação do risco (por exemplo, a utilização de dispositivos de proteção que possam proteger o integrador durante a instalação e a programação). DUCO Robots Co., Ltd. não será responsável por danos causados pela não instalação de dispositivos de proteção.
Operação de segurança#
Paragem de emergência#
A paragem de emergência é uma condição que tem precedência sobre todas as outras operações de controlo do robô e resultará em todas as paragens perigosas controladas, removerá a potência do motor do acionamento do robô, permanecerá ativa até ser reposta e só pode ser restaurada por operação manual.
O estado de paragem de emergência indica que o sistema de alimentação está desligado e que o robô não se pode mover. O utilizador deve executar o passo de reversão, ou seja, repor o botão de paragem de emergência e premir o botão «Power on» (Ligar) na consola de programação para retomar o funcionamento normal. A paragem de emergência não pode ser utilizada como uma medida de redução de riscos, mas pode ser utilizada como um dispositivo de proteção secundário.
A paragem de emergência não deve ser utilizada para paragens normais do programa, uma vez que pode provocar um desgaste adicional desnecessário do robô.
Funções relacionadas com a segurança#
Introdução à função de segurança#
Para a ligação de outros robôs e dispositivos de proteção adicionais, os robôs da série GCR estão equipados com uma variedade de caraterísticas de segurança internas, interface eléctrica de emergência I/O de segurança, bem como sinais de controlo digitais e analógicos.
Cuidado
A utilização e a configuração das funções e interfaces de segurança devem seguir os procedimentos de avaliação de risco para cada aplicação do robot.
Se o robô descobrir uma falha ou violação no sistema de segurança (por exemplo, se um dos fios do circuito de Paragem de Emergência for cortado ou se uma limitação de segurança for violada), é iniciada uma Paragem de Categoria 0.
O tempo de paragem deve ser tido em conta no âmbito da avaliação dos riscos da aplicação.
Aviso
A utilização de parâmetros de configuração de segurança diferentes dos determinados pela avaliação de riscos pode resultar em perigos que não são razoavelmente eliminados ou em riscos que não são suficientemente reduzidos.
Certifique-se de que as ferramentas e as pinças estão ligadas de forma adequada para que, em caso de interrupção de energia, não ocorram perigos.
A garra não está protegida pelo sistema de segurança GCR. A garra e o cabo de ligação não são monitorizados.
Categorias de paragens de segurança#
Dependendo da situação, o robô pode ativar três categorias de paragem definidas de acordo com a norma IEC 60204-1. Estas categorias são definidas na tabela seguinte.
0(SS0)
Desligue a alimentação do robô imediatamente
1(SS1)
Reduza imediatamente a velocidade de cada junta para 0 com a aceleração mais rápida, acione o bloqueio depois de a junta estar estacionária e desligue a fonte de alimentação do robô.
2(SS2)
O robô é desacelerado até ficar estacionário, mantendo a trajetória. Após a paragem, todas as juntas permanecem no estado habilitado e o travão não é movido.
Alternar entre categorias de paragens:
Quando é efectuada uma paragem de Categoria 1, é acionado um temporizador em simultâneo. Se o robô permanecer acima da velocidade de segurança definida após 500 ms, passará para a paragem de Categoria 0.
Caraterísticas de segurança#
As funções de segurança do robô colaborativo DUCO listadas na tabela abaixo estão localizadas no robô e destinam-se a controlar o sistema do robô, ou seja, o robô e as ferramentas/efeitos finais ligados. A função de segurança do robô é utilizada para reduzir o risco para o sistema do robô, conforme determinado por uma avaliação de riscos.
Paragem de emergência (ES)
Executando SS1
Paragem protetora
Executando SS2
Paragem Operacional Segura (SOS)
Após a execução do ss2, a monitorização SOS será acionada para monitorizar o desvio atual da posição do robô e o SS0 será acionado se for violado
Posição limitada segura conjunta (SLP)
De acordo com a configuração do limite, o SS2 é acionado quando a posição da articulação atinge o limite. Se o limite da junta for acionado, ss0 será acionado diretamente.
Velocidade limitada Joint Safe (SLS)
De acordo com a definição do limite, o SS2 é acionado quando a velocidade da junta atinge o limite. Se o limite de velocidade da junta for acionado, ss0 será acionado diretamente.
Limite de posição TCP
Pode ser definido um plano de segurança para limitar a área de trabalho do robô, que é definida de acordo com o valor limite. Quando o valor limite é atingido,SS2 é acionado. Se o plano de segurança for acionado, o controlador de segurança aciona diretamente ss0. São permitidos, no máximo, seis planos de segurança e três sistemas de coordenadas TCP.
Limite de velocidade TCP
De acordo com a configuração do limite, o SS2 é acionado quando o limite é atingido. Se o limite de velocidade TCP for acionado, o controlador de segurança acionará diretamente ss0.
Limite de posição do cotovelo
De acordo com a configuração do limite, o SS2 é acionado quando o limite é atingido. Se a restrição de posição do cotovelo for acionada, o controlador de segurança aciona diretamente o ss0.
Limite de velocidade do cotovelo
De acordo com a configuração do limite, o SS2 é acionado quando o limite é atingido. Se o limite de velocidade do cotovelo for acionado, o controlador de segurança aciona diretamente ss0.
Limite de força conjunta
De acordo com a configuração do limite, o SS2 é acionado quando o limite é atingido. Se o limite de binário da junta for acionado, o controlador de segurança aciona diretamente ss0.
Limite de força TCP
De acordo com a configuração do limite, o SS2 é acionado quando o limite é atingido. Se o limite de força final for acionado, o controlador de segurança aciona diretamente ss0.
Limite de força do cotovelo
De acordo com a configuração do limite, o SS2 é acionado quando o limite é atingido. Se o limite de força do cotovelo for acionado, o controlador de segurança aciona diretamente ss0.
Limite de potência
De acordo com a configuração do limite, o SS2 é acionado quando o limite é atingido. Se o limite de potência for acionado, o controlador de segurança aciona diretamente ss0.
Entrada do interruptor de modo
Se a entrada física estiver desativada, pode alternar através da IU. Mas não os dois ao mesmo tempo. O SS2 é acionado quando o modo é alterado. Se o script estiver em pausa, poderá continuar em execução.
Ativar entrada de dispositivo
Pode escolher se deseja ativar esta entrada. Esta entrada é válida apenas no modo manual e não no modo automático. A violação aciona o SS2.
Entrada de paragem protetora
Se este parâmetro for válido em todos os modos, o SS2 é acionado. Se a entrada de reinicialização da proteção de segurança não estiver ativada, será reinicializada automaticamente após o sinal desaparecer. Caso contrário, a entrada de reinicialização necessita de ser acionada antes que a reinicialização possa ser realizada.
Entrada de rearme de paragem protetora
Pode escolher se deseja repor a entrada de sinal. Se a reposição da proteção de segurança estiver ativada, quando a proteção de segurança de acionamento parar e o sinal de acionamento desaparecer, será necessária a entrada do sinal do canal antes que o movimento possa continuar. O flanco ascendente é válido e o nível alto precisa de ser mantido durante 500 ms.
Entrada de paragem de proteção automática
Este parâmetro só é válido no modo automático. SS2 é acionado. Após o sinal desaparecer, o modo de segurança volta ao normal.
Entrada de rearme de paragem de proteção automática
Semelhante à entrada de rearme da paragem de proteção, só é válida para a paragem de proteção acionada pela entrada de paragem de proteção automática.
Saída de paragem de emergência do sistema
Este sinal é gerado apenas quando o sistema é acionado por uma saída de paragem protetora de paragem de emergência
Saída de paragem protetora
Este sinal é emitido quando a entrada de paragem de proteção é acionada, saída de paragem de proteção automática.
A proteção do modo automático interrompe a saída
Este sinal será emitido apenas quando a proteção parar no modo automático.
Modo de redução
O modo reduzido é acionado e são utilizados os parâmetros relacionados com o modo reduzido.
Reduzir a saída do modo
O sinal pode ser emitido globalmente.
Modo de recuperação
Quando o limite conjunto ou o limite tcp for excedido, terá de reiniciar para entrar no modo de recuperação. O modo de recuperação limita a velocidade da junta a não mais de 30 graus/s e a velocidade final a não mais de 250 mm/s.
Interfaces IO de segurança#
A interface IO de segurança é uma interface externa de entrada e saída SCram e de segurança fornecida pelo armário de controlo, incluindo 1 entrada de sinal SCram (sinal passivo), 1 saída de feedback SCram (sinal ativo), 1 entrada de paragem de proteção (sinal passivo), 2 entradas de segurança configuráveis (sinal passivo) e 2 saídas de segurança configuráveis (sinal ativo). Entre elas, a entrada de sinal de scram, a entrada de paragem de proteção e a entrada de segurança configurável são válidas em eletrónica de alto nível, e o nível efetivo é de 11V-30VDC; além disso, quando se utiliza a saída de segurança configurável e a saída de feedback de scram, é necessário ligar o relé para comutação.
A entrada de segurança configurável pode ser configurada como: entrada de reposição de guarda, entrada de paragem de guarda em modo automático, entrada de reposição de guarda em modo automático, entrada de modo de redução. As saídas de segurança configuráveis podem ser configuradas como: saída de reposição de guarda, saída de paragem de guarda em modo automático, saída de modo de redução. A definição da interface é a seguinte:
Definição da interface E/S de segurança

ID |
Definição de Sinal |
ID |
Definição de Sinal |
|---|---|---|---|
1 |
EI1+ (Entrada de emergência do sistema 1+) |
2 |
EI1- (Entrada de emergência do sistema 1-) |
3 |
EI2+ (Entrada de emergência do sistema 2+) |
4 |
EI2- (Entrada de emergência do sistema 2-) |
5 |
PS1+ (Entrada de paragem protetora 1+) |
6 |
PS1- (Entrada de paragem protetora 1-) |
7 |
PS2+ (Entrada de paragem protetora 2+) |
8 |
PS2- (Entrada de paragem protetora 2-) |
9 |
CI1_1+ Entrada de segurança configurável 1 (1+)] |
10 |
CI1_1- [Entrada de segurança configurável 1 (1-)] |
11 |
CI1_2+ [Entrada de segurança configurável 1 (2+)] |
12 |
CI1_2- [Entrada de segurança configurável 1 (2-)] |
13 |
CI2_1+ [Entrada de segurança configurável 2 (1+)] |
14 |
CI2_1- [Entrada de segurança configurável 2 (1-)] |
15 |
CI2_2+ Entrada de segurança configurável 2 (2+)] |
16 |
CI2_2- [Entrada de segurança configurável 2 (2-)]] |
17 |
EI1+ (Saída de emergência do sistema 1+) |
18 |
EI1- (Saída de emergência do sistema 1-) |
19 |
EI2+ (Saída de emergência do sistema 2+) |
20 |
EI2- (Saída de emergência do sistema 2-) |
21 |
CO1_1+[Saída de segurança configurável 1 (1+)] |
22 |
CO1_1-[Saída de segurança configurável 1 (1-)] |
23 |
CO1_2+[Saída de segurança configurável 1 (2+)] |
24 |
CO1_2-[Saída de segurança configurável 1 (2-)] |
25 |
CO2_1+[Saída de segurança configurável 2 (1+)] |
26 |
CO2_1-[Saída de segurança configurável 2 (1-)] |
27 |
CO2_2+[Saída de segurança configurável 2 (2+)] |
28 |
CO2_2-[Saída de segurança configurável 2 (2-)] |
Risco de ferimentos e colisão com a pinça#
Existem ângulos mortos na função de deteção de colisão durante o funcionamento real do robô, pelo que os utilizadores devem ter em atenção o risco de falha na deteção de colisão ou de ferimentos nas pinças em condições de trabalho especiais. São descritas abaixo três condições de trabalho típicas.
Condição de trabalho 1: Quando a posição final do robô está a mais de 1000 mm de distância do centro da base do robô, se o robô se mover na direção da seta vermelha, como se mostra na FIG. 2.6.1 e na FIG. 2.6.2, o robô é menos sensível às forças externas na direção do movimento e é mais propenso ao risco de lesões por fixação. Quando o robô se desloca na direção da seta verde, como se mostra nas FIG. 2.6.1 e FIG. 2.6.2, se o robô colidir com o ambiente externo, será sensível à força externa causada pela colisão.
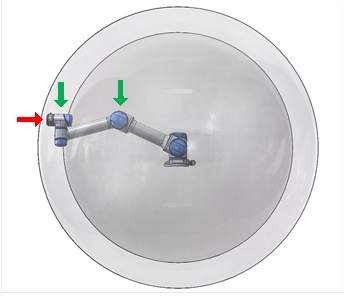
FIG. 2.6.1 Vista frontal do robô em condições de trabalho
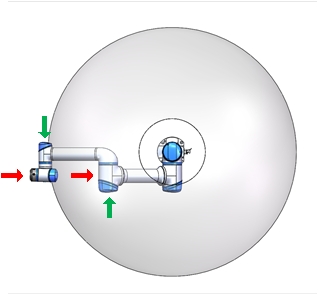
FIG. 2.6.2 Vista superior do robô em condições de trabalho
Condição de trabalho 2: Com a direção Z da base do robô como centro e o raio de cerca de 350 mm, se o ponto de contacto estiver dentro deste intervalo e a direção da força de contacto for perpendicular ao plano onde se encontra a biela da articulação 2 e da articulação 3, a função de deteção de colisão é difícil de detetar a colisão entre o robô e o mundo exterior. Neste momento, se a direção da força de contacto entre o robô e o mundo exterior for mais consistente com a direção da marca de base Z, o robô é mais sensível à força externa gerada pela colisão, como mostra a seta verde na Figura 2.6.3.
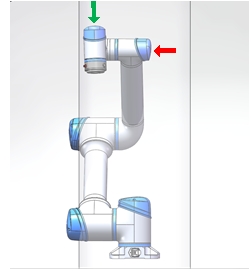
Figura 2.6.3 Vista frontal da condição de trabalho 2
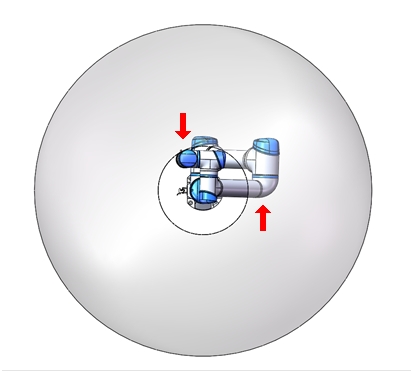
FIG. 2.6.4 Vista superior da condição de trabalho 2
Condição de trabalho 3: Independentemente da pose e do estado de movimento do robô, quando este colide com o mundo exterior, se o ponto de colisão estiver centrado na origem da posição de base do robô e o raio for de cerca de 350 mm, é difícil para o robô detetar este tipo de colisão e é mais provável que ocorra o perigo de ferimentos por mordedura, como mostra a seta vermelha na FIG. 2.6.5 e na FIG. 2.6.6. Quando o ponto de colisão está fora do alcance e não satisfaz as condições da zona cega de deteção de colisão descritas nas condições de trabalho 1 e 2, o robô tem mais facilidade em detetar a colisão com o mundo exterior, como mostra a seta verde na Figura 2.6.5 e na Figura 2.6.6.
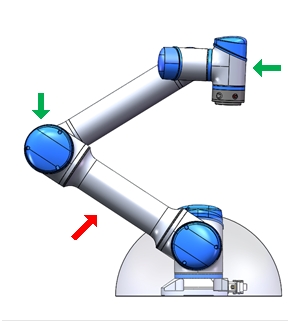
FIG. 2.6.5 Vista de três lados das condições de trabalho
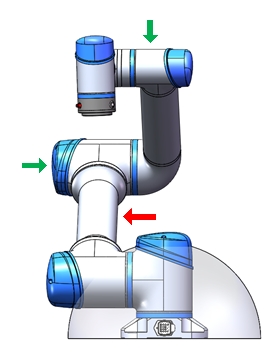
Figura 2.6.6 Três pontos de vista positivos sobre as condições de trabalho
Para todas as condições de trabalho descritas acima, se o robô estiver a mover-se numa direção que não seja sensível à deteção de colisões externas, a velocidade de deslocação neste ponto deve ser reduzida tanto quanto possível, tendo em conta a necessidade de limitar as forças de colaboração do robô com o mundo exterior.
Quando, infelizmente, ocorre um acidente, a libertação manual da função de travão de retenção pode ser utilizada para mitigar os danos causados pelo acidente.
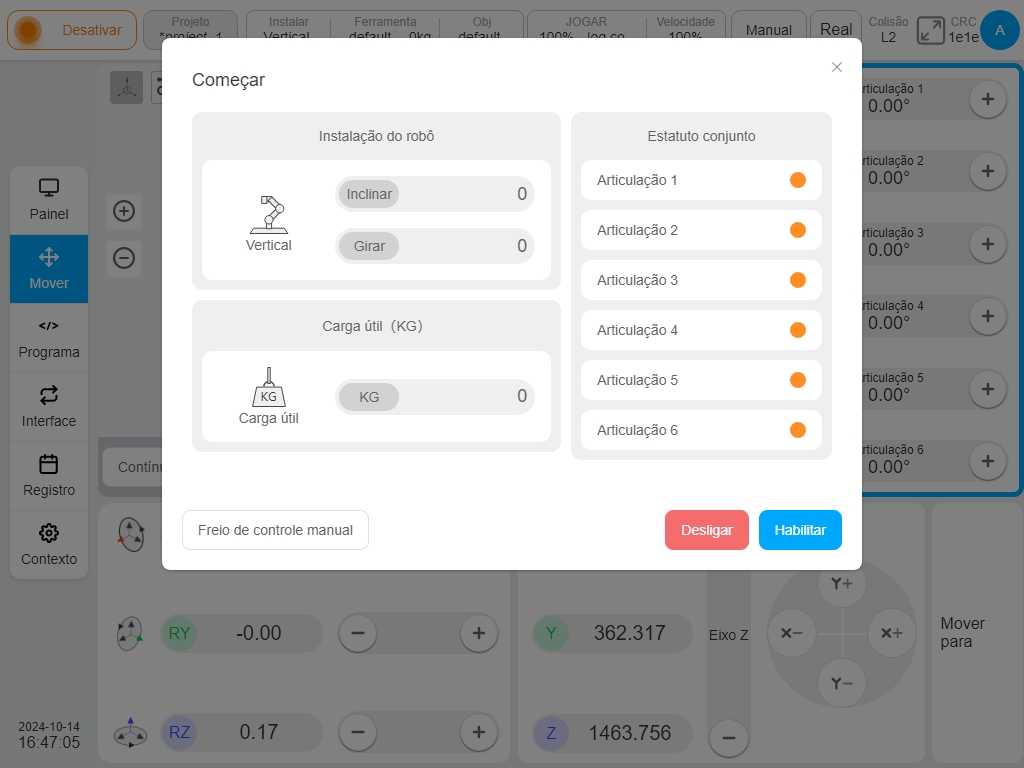
Quando o robô está ligado mas não está ativado, pode iniciar a «Função de Travão de Libertação Manual» no canto inferior esquerdo da interface. Depois de clicar no botão «Manual Release Brake» (Travão de libertação manual), a interface muda como se mostra na figura abaixo:
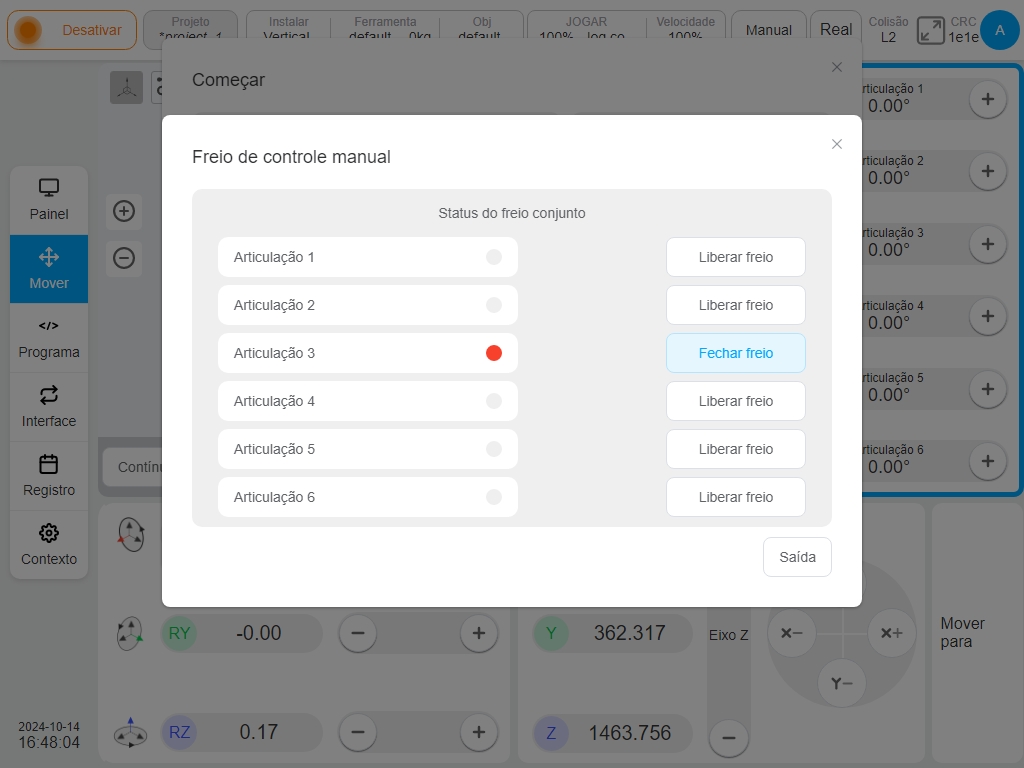
Ao clicar no botão «Libertar Travão», o travão da junta correspondente pode ser libertado, o que permite que a junta seja acionada sem energia. O indicador luminoso vermelho no lado esquerdo da interface é utilizado para indicar o estado do travão de imobilização. Ao clicar no botão «Fechar Travão», o travão da respectiva junta é fechado.
Risco de excesso de velocidade da Singularidade do Robô#
O robô abranda automaticamente ao executar o planeamento do movimento (linha reta, arco, etc., excluindo o movimento da articulação) perto da singularidade e deve evitar a singularidade ou passar a singularidade com o movimento da articulação ao ensinar. Existem pontos singulares do ombro, pontos singulares do cotovelo e pontos singulares do pulso para a configuração da série GCR.
Singularidade do ombro#
Quando o centro da articulação do pulso O6 está localizado no eixo J1 da articulação 1, a singularidade do ombro é causada em simultâneo, não conduzindo a qualquer solução para a articulação 1. Também se regista um efeito singular quando O6 está localizado muito próximo de J1, em que o movimento da extremidade pode causar uma sobredotação da articulação 1. Consulte a figura abaixo para ver uma pose singular perto da pose.
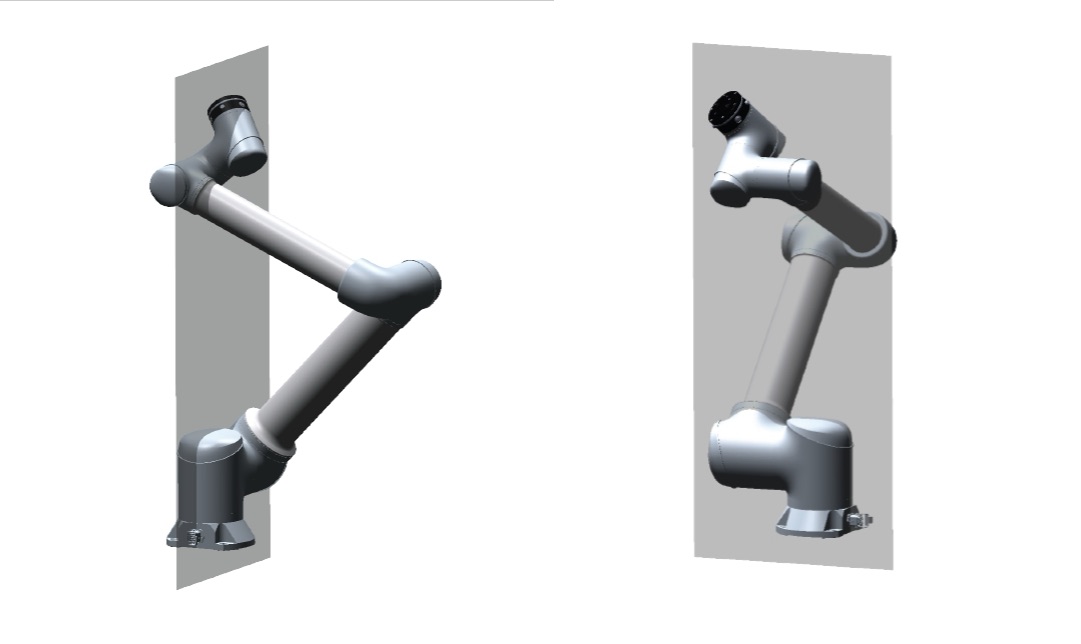
Figura 2.7.1 Pose de referência da singularidade do ombro
Singularidade do cotovelo#
Quando os eixos da articulação 2, da articulação 3 e da articulação 4, respetivamente indicados como J2, J3 e J4, são coplanares, não há solução para a articulação 2. Simplesmente, quando a articulação 3 está na pose quase singular, perto de 0 graus, mover a extremidade pode levar a articulação 2, a articulação 3 e a articulação 4 a exceder o limite. Consulte a figura abaixo para ver a pose singular perto do cotovelo:
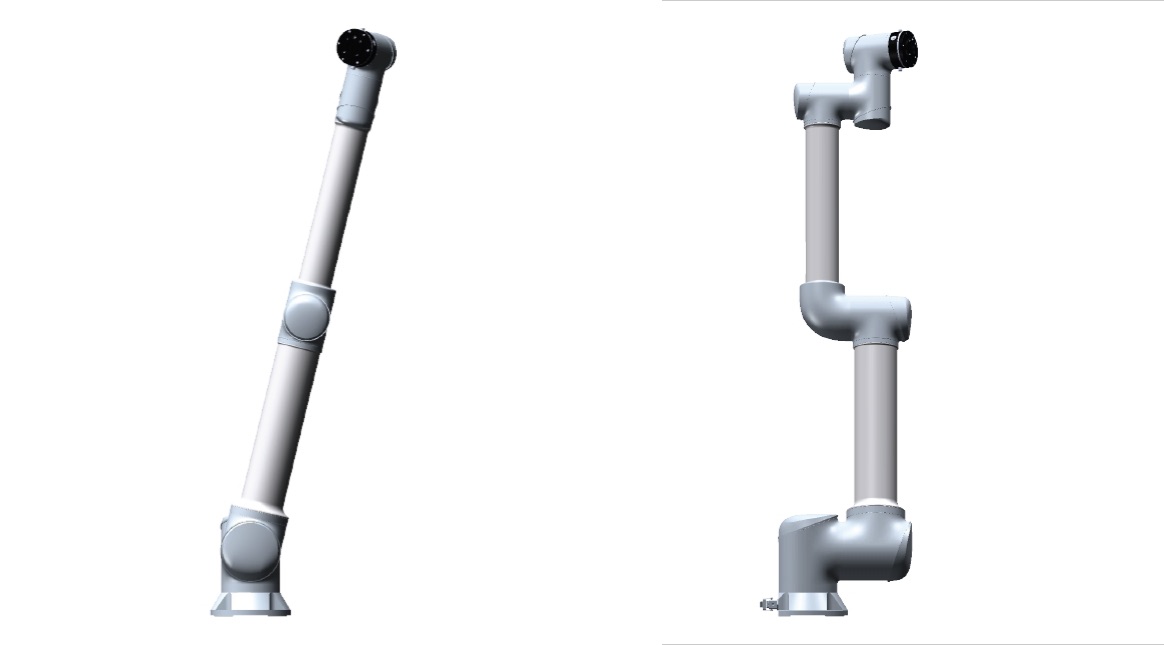
Figura 2.7.2 Pose de referência da singularidade do cotovelo
Singularidade do pulso#
Quando a articulação 5 está a 0 graus, não há solução para a articulação 6, resultando numa singularidade do pulso. Quando a articulação 5 está próxima de 0 graus, apresentando uma postura singular junto ao pulso, e a deslocação da extremidade pode provocar o excesso de velocidade da articulação 4, da articulação 5 e da articulação 6. Ver a figura seguinte:
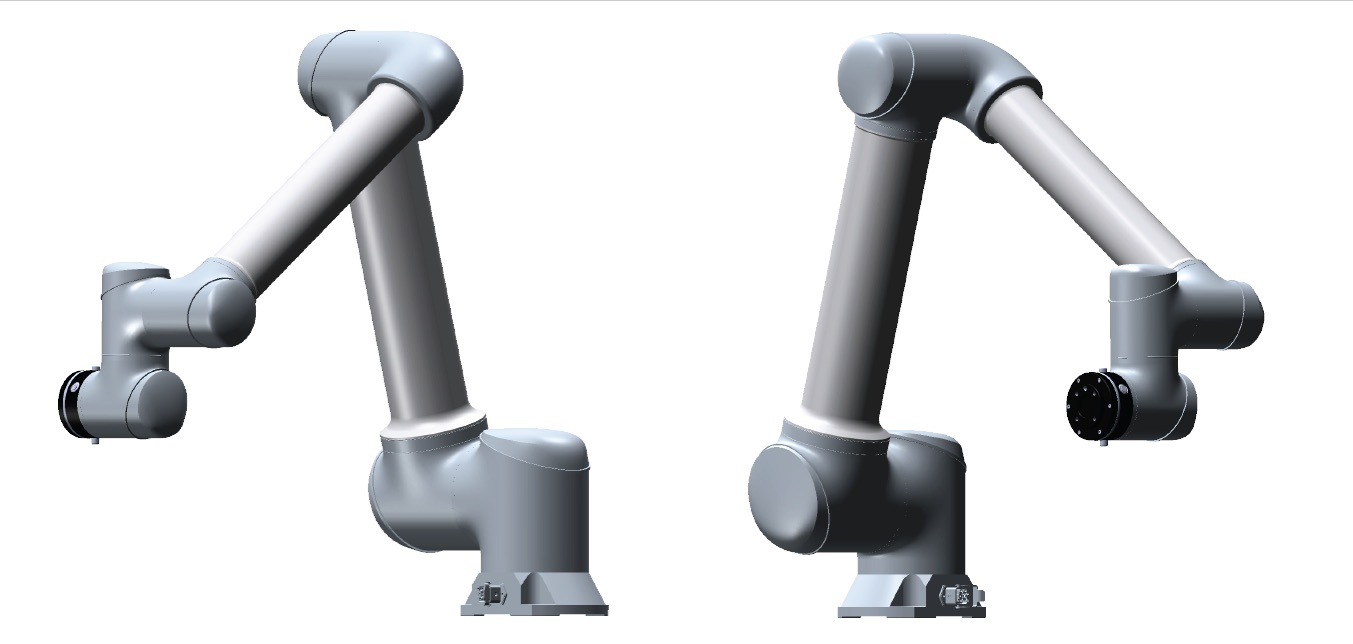
Figura 2.7.3 Pose de referência da singularidade do pulso
Quando o robô se desloca para um ponto singular ou próximo dele, como na figura acima, o movimento planeado com base nas coordenadas cartesianas não pode ser resolvido inversamente para o movimento conjunto de cada eixo e o planeamento do movimento não pode ser executado corretamente. Assim, pode ser adotado o movimento de movimento do nó ou o comando de movimento movej.
Cuidado
Evite utilizar comandos como linhas rectas, arcos e mover as extremidades nas direcções X, Y, Z, RX, RY e RZ perto dos pontos de singularidade. O robô corre o risco de parar.
As trajectórias com riscos singulares devem ser totalmente avaliadas antes de serem executadas.