Página de síntese#
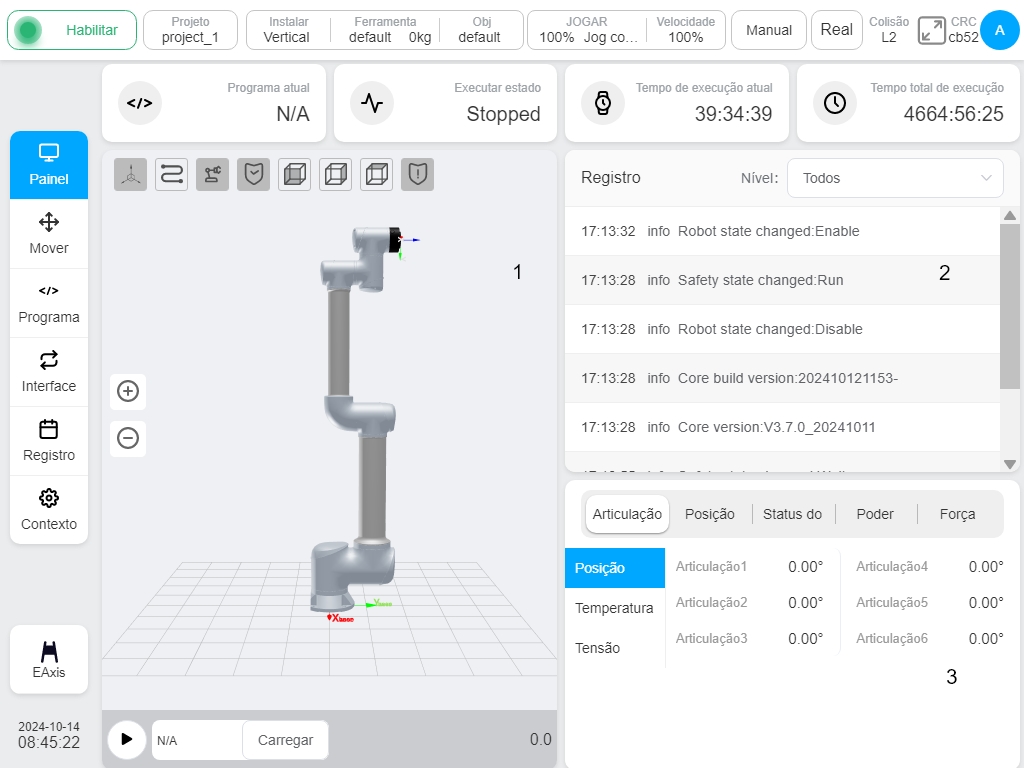
Clicando no botão «Visão geral» na barra de navegação, o utilizador é levado para a página de visão geral, como mostra a figura. Na parte superior da área de conteúdo da página, são exibidos: programa em execução atual, status de execução do programa, tempo de execução atual e tempo de execução de toda a máquina. No lado esquerdo da página, ① exibe o modelo de simulação 3D; no lado superior direito, ② exibe as informações de registo, e o registo pode ser visualizado selecionando cinco níveis diferentes: All, Fatal, Error, Warning e Information através da caixa suspensa; no lado inferior direito, ③ exibe as informações sobre as articulações do robô (posição/temperatura/tensão), a posição espacial (no sistema de coordenadas base), o status das IOs, as informações sobre a fonte de alimentação (no gabinete de controle) e as informações de força.
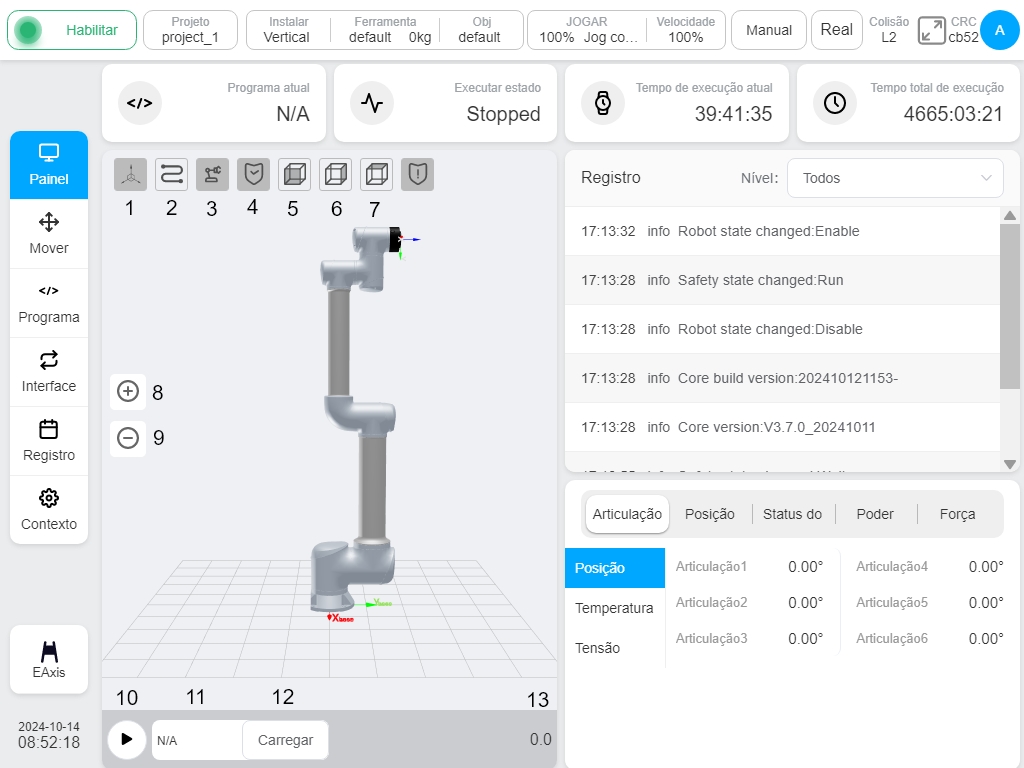
Na área do modelo de simulação 3D, conforme mostrado na figura, os ícones ① - ⑦ no canto superior esquerdo indicam se devem ser exibidos: sistema de coordenadas da peça de trabalho e sistema de coordenadas da ferramenta, trajetória final, modelo de simulação 3D do robô, zona de segurança, visualização frontal, visualização direita e visualização superior. Os ícones ⑧ e ⑨ são botões para operar o zoom-in e o zoom-out do modelo 3D, respetivamente. Os ícones ⑩ - ⑬ são o botão de execução do programa, a caixa de exibição do programa atualmente em execução, o botão de carregamento do programa e a exibição do tempo de execução do programa, respetivamente.
Clique no botão «Load» (Carregar) e aparece a interface da lista de programas, como mostra a figura. A lista de programas apresenta todas as pastas (por exemplo, Test_1) e ficheiros de programas com a extensão.jspf (por exemplo, ee.jspf). Existem três botões na parte inferior do ecrã: Voltar à camada superior, Cancelar e Selecionar.
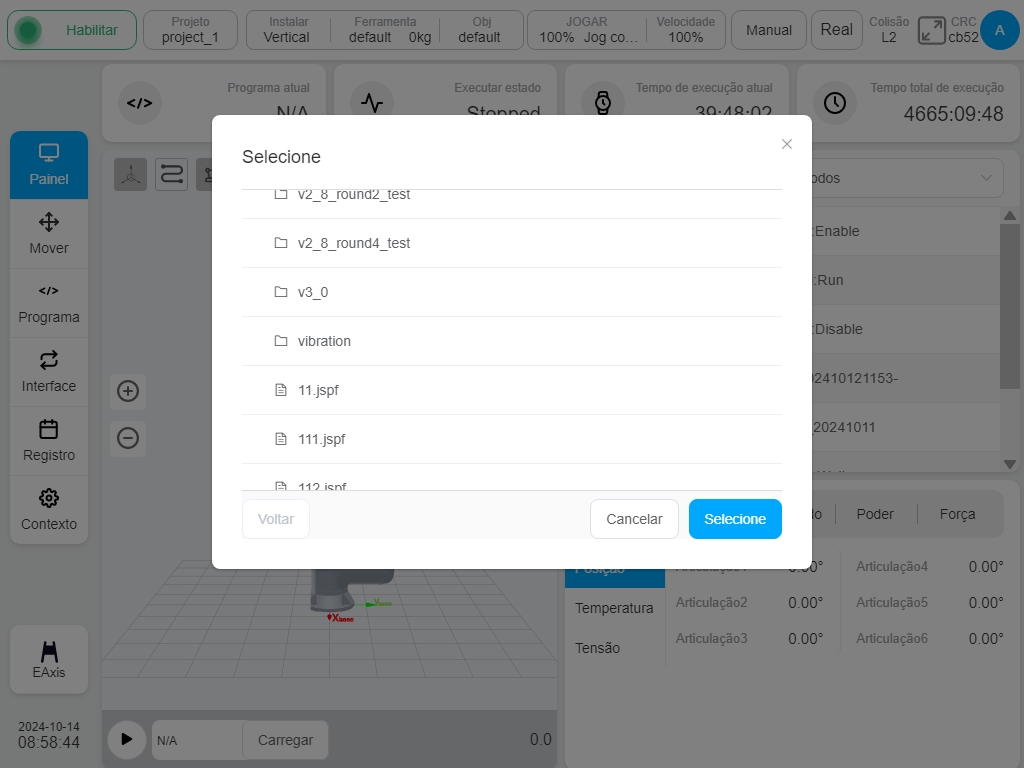
Selecionar o ficheiro de programa que precisa de ser carregado e executado, clicar no botão «Select» (Selecionar) na interface, a interface da lista de programas desaparece automaticamente, enquanto o ícone mostra o nome do ficheiro de programa selecionado ou o nome do ficheiro com «…/». O nome do ficheiro do programa selecionado ou o nome do ficheiro com “…/” (existem pastas aninhadas, por exemplo, …/4560.jspf) será apresentado no ícone. Se o programa começar com um bloco de função «Start», clicar no botão «Run» com o botão «Hold to Move» mostrará o modelo 3D em perspetiva a cinzento (coletivamente referido como o modelo 3D a cinzento), como mostra a figura. Ao premir e manter premido o botão «Hold Move» (Manter movimento), o robô desloca-se para a posição inicial definida no programa, ou seja, o modelo 3D em perspetiva cinzenta. Quando o robô se move para o modelo 3D a cinzento, o botão “Press and Hold Move” desaparece. Nesta altura, clique novamente no botão “Run” para executar o programa.