Definições de segurança#
Esta secção descreve como visualizar as configurações de segurança e alterar as configurações de segurança da aplicação. Existem atualmente dois tipos de controladores de segurança, DucoSafetyV1.0 para armários de controlo DC30. DucoSafetyV2.0 ADAPTA-SE aos armários de controlo DC00 / DC15S/ DC30D.
DucoSafety V1.0#
Ver configurações de segurança#
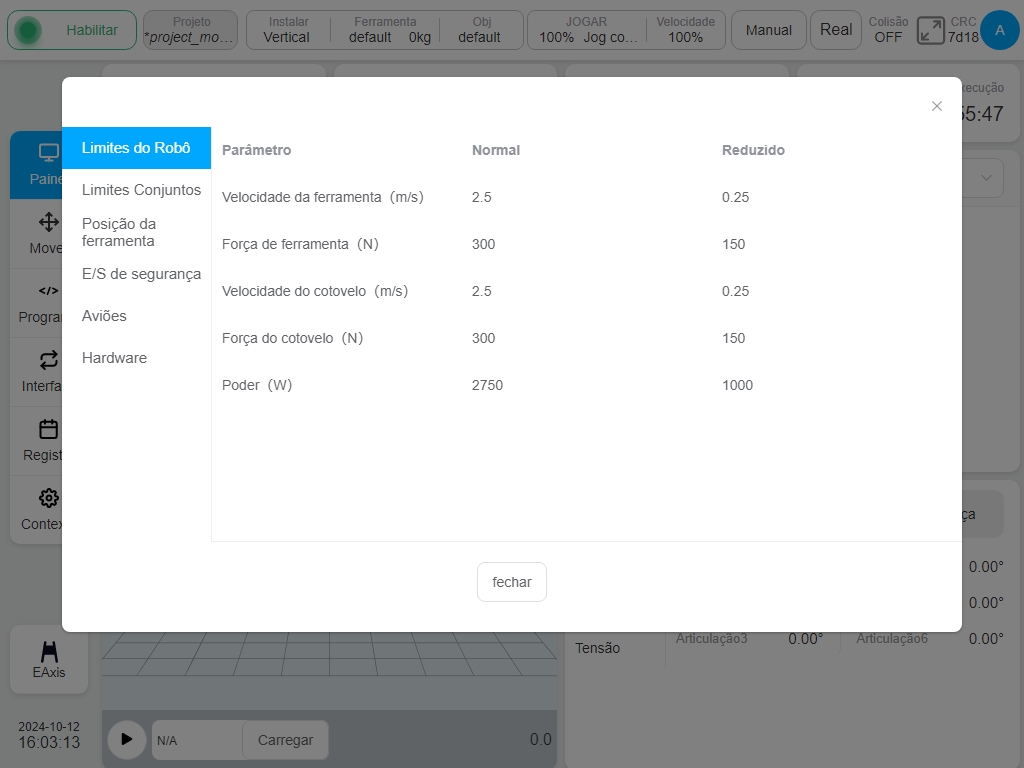
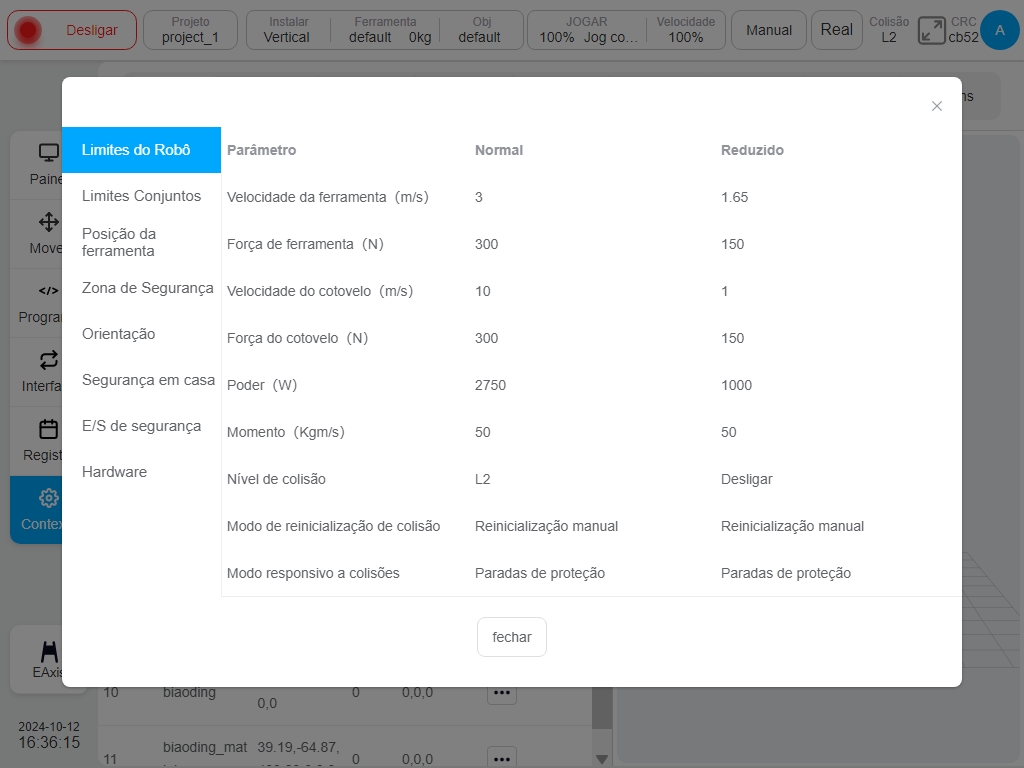
Clique no botão «Verificação de segurança» na barra de estado. É apresentada a seguinte caixa de diálogo para visualizar os parâmetros de configuração de segurança atualmente activados.
O utilizador também pode ver os parâmetros de configuração de segurança na página de definição de segurança.
Pedido de alteração da configuração de segurança#
É necessário utilizar a palavra-passe para desbloquear a conta antes de alterar a configuração de segurança. Entrar na página de definição – configuração de segurança, clicar no botão «Desbloquear» no canto inferior esquerdo para desbloquear o robot apenas quando a alimentação está desligada. Introduzindo a palavra-passe (palavra-passe de início de sessão do utilizador atual), entra-se no modo de configuração dos parâmetros de segurança depois de passada a verificação. A área de estado na barra de estado é apresentada como Definições dos Parâmetros de Segurança.
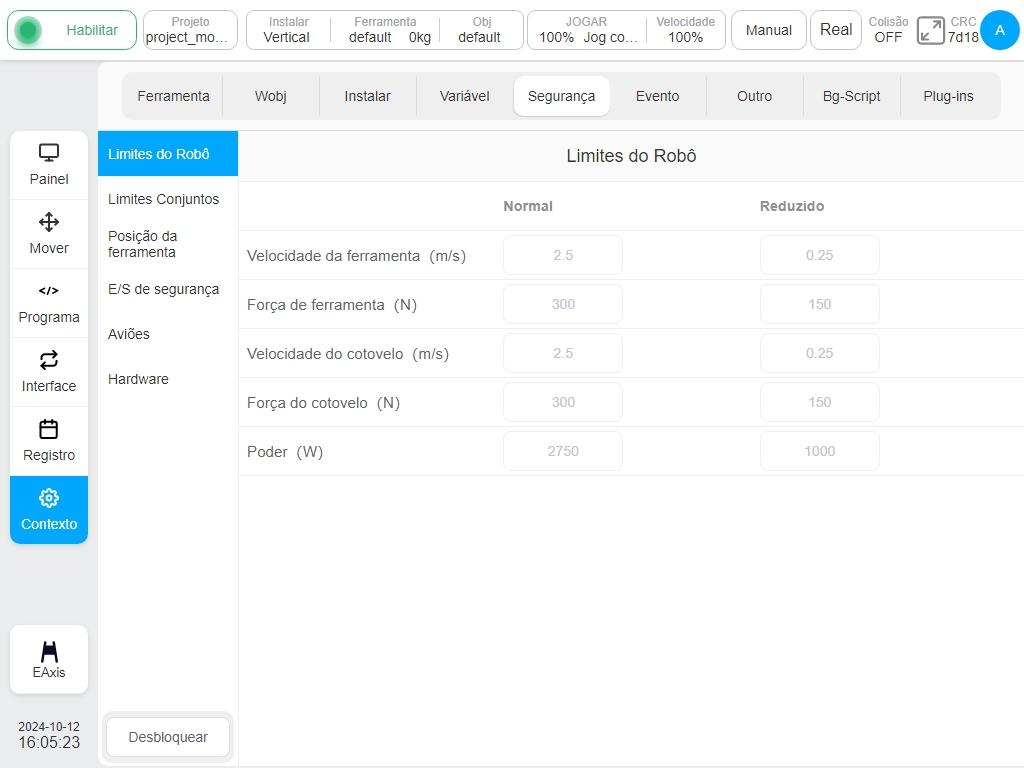
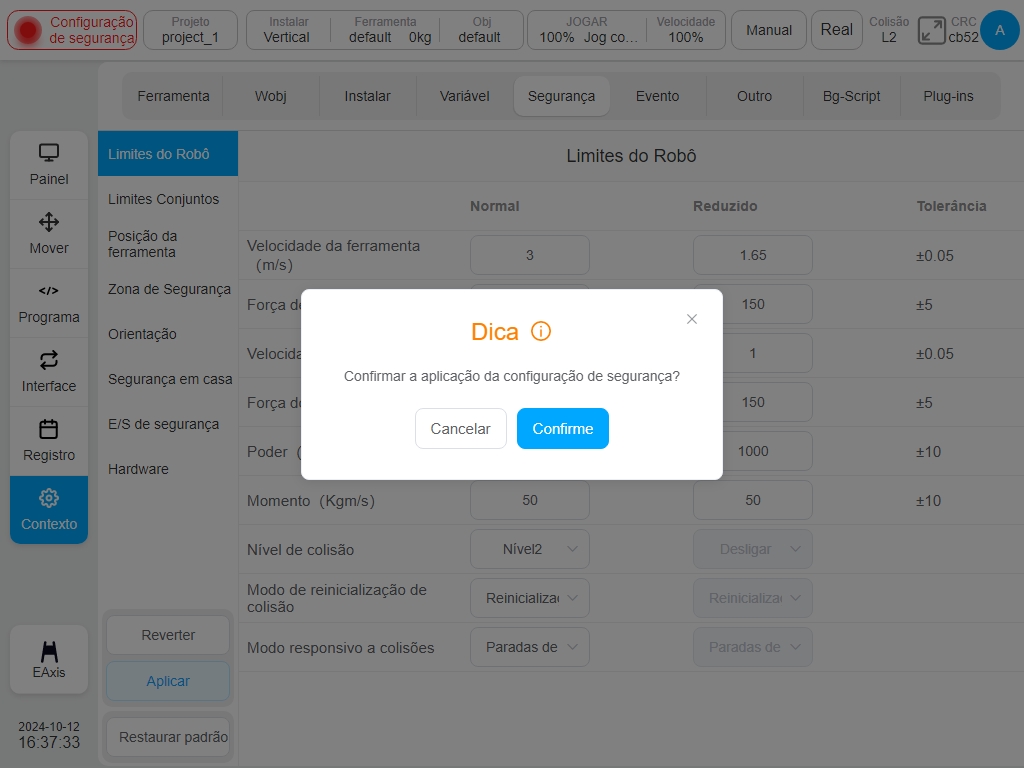
Quando alterar a configuração, a modificação será realçada a amarelo. Todas as alterações efectuadas só entram em vigor quando se clica no botão «Aplicar definições». Clicar no botão «Repor as predefinições» para repor todos os parâmetros de segurança nas predefinições. Depois de clicar no botão «Aplicar definições», aparece uma caixa de diálogo, como mostra a figura.
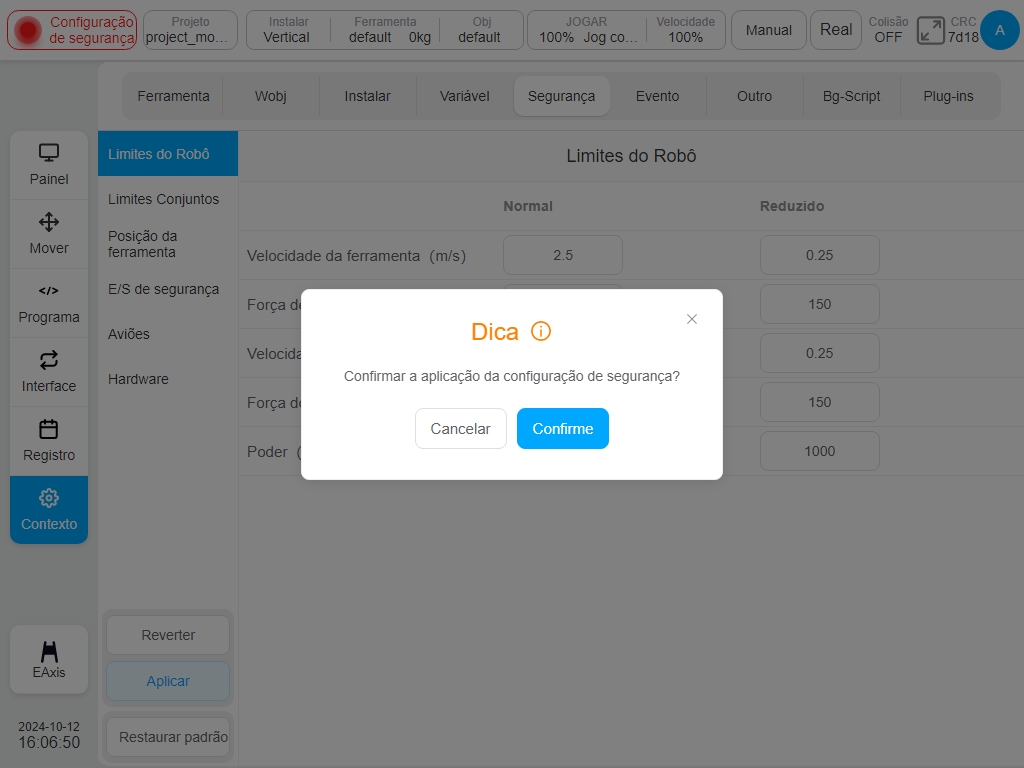
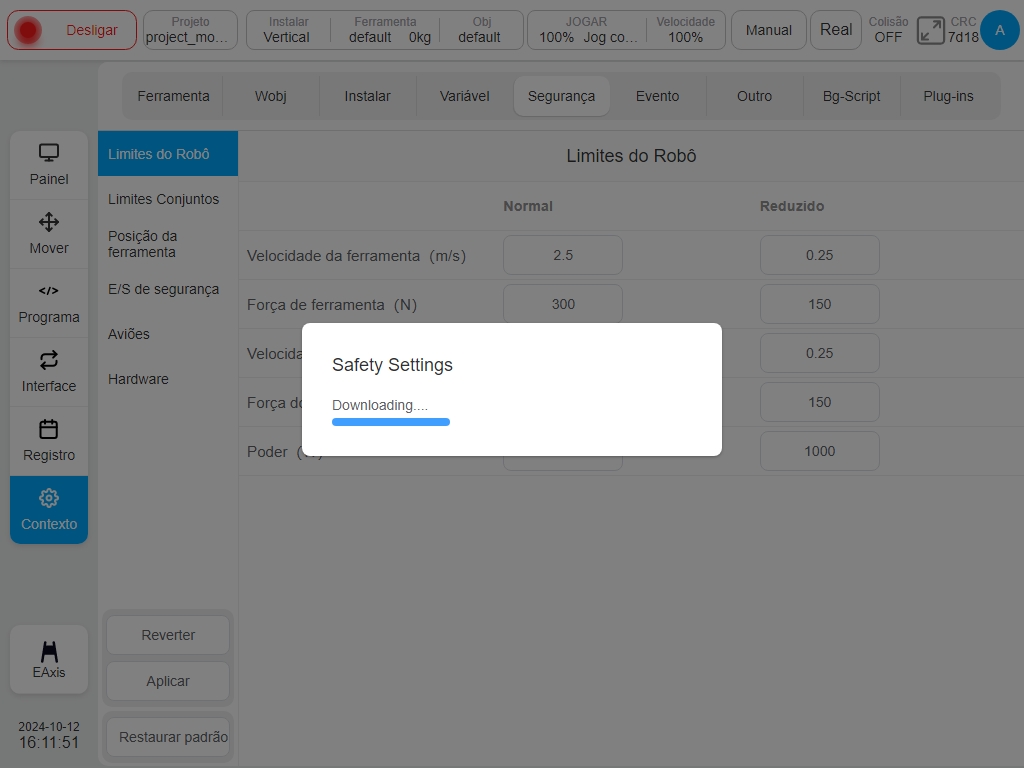
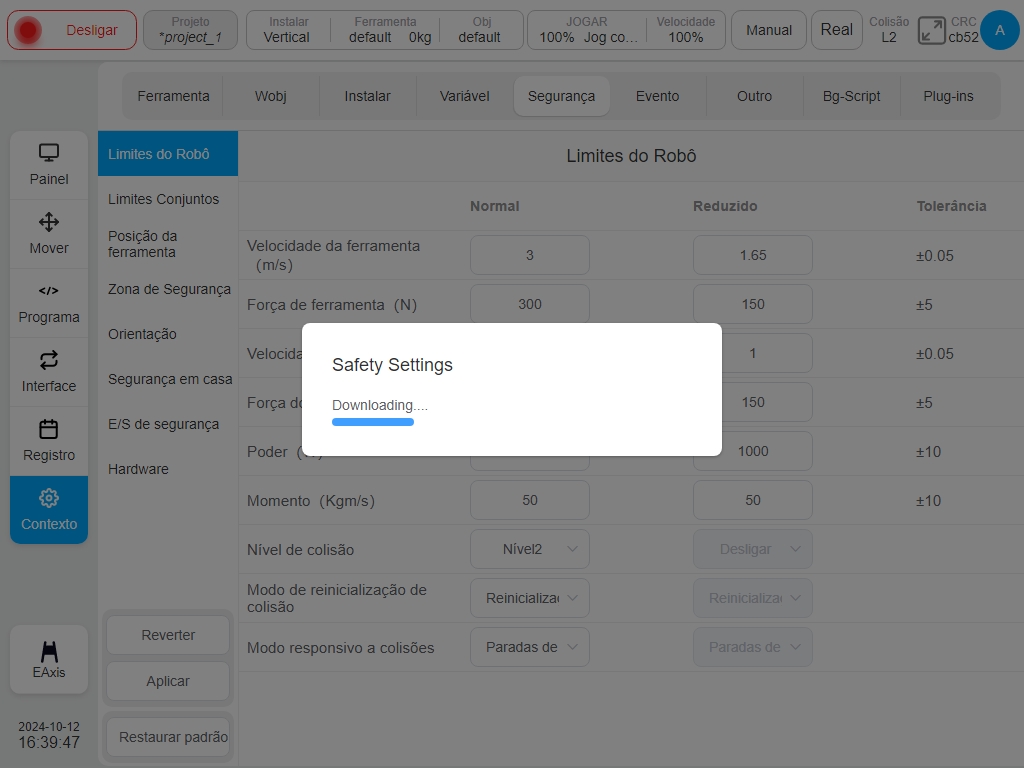
Depois de clicar no botão «Confirmar», é apresentada uma caixa de diálogo para carregar os parâmetros de segurança, como mostra a figura.
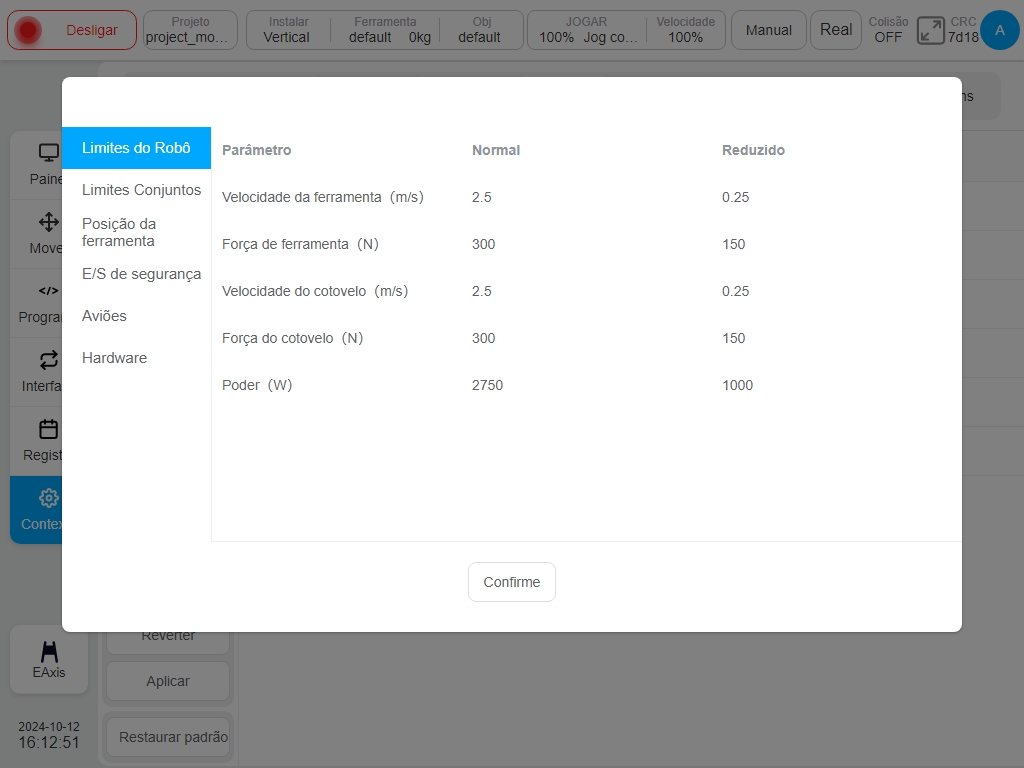
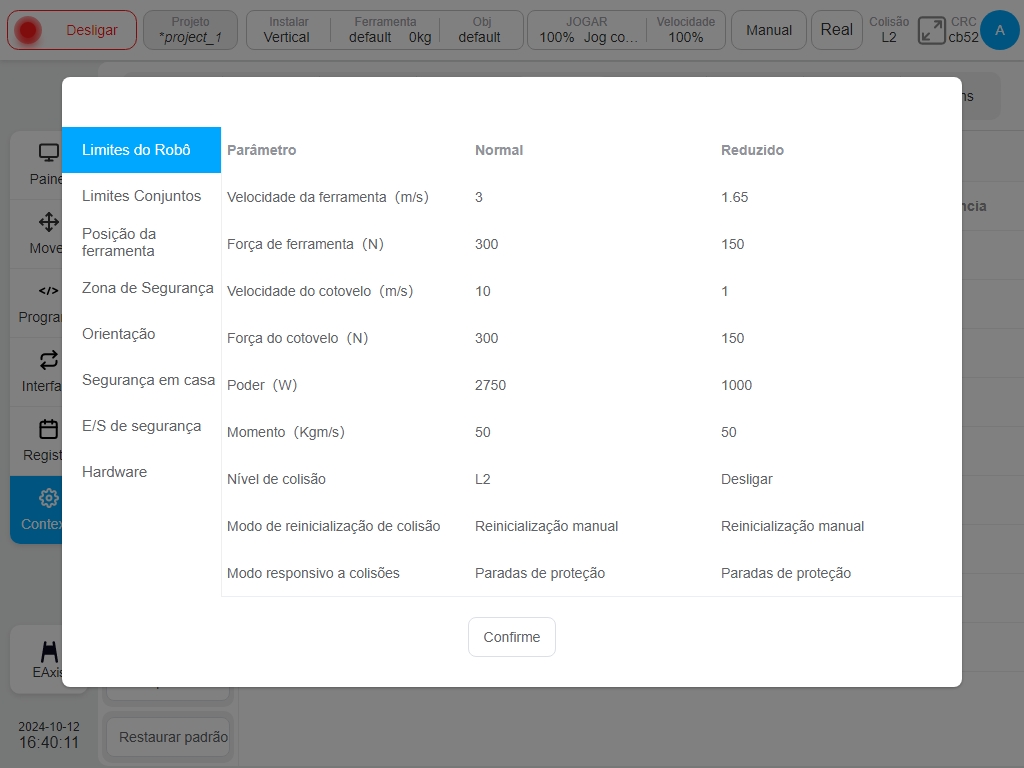
Após a configuração dos parâmetros de segurança, o sistema apresenta os parâmetros de segurança configurados numa caixa de diálogo para efeitos de verificação. A figura seguinte mostra um exemplo. Quando tudo estiver verificado, clique no botão «OK» para definir os parâmetros de segurança. Após a configuração ser bem sucedida, a verificação de segurança acima da barra de estado é alterada.
Parâmetro de segurança Descrição#
Esta secção descreve os parâmetros de configuração de segurança do robô.
Modo de segurança#
Modo normal:O modo de segurança é ativado por defeito
Modo reduzido: Este modo pode ser ativado através da entrada de segurança IO
Modo de recuperação:Quando os parâmetros de movimento reais do robô excedem o limite de segurança, fazendo com que o robô pare, o modo de recuperação será ativado e o utilizador pode mover o robô dentro do limite de segurança
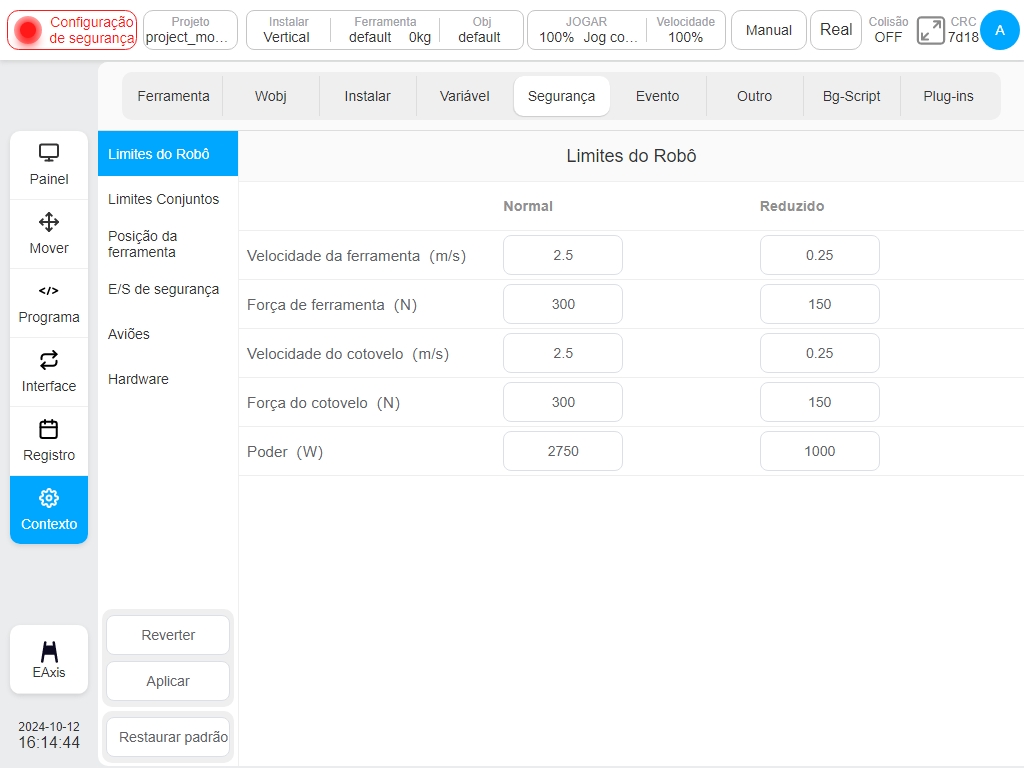
Parâmetros de segurança do robô#
Os parâmetros do robô são utilizados para limitar o movimento geral do robô. O utilizador pode configurar os valores dos seus parâmetros no modo normal e no modo reduzido.
Velocidade máxima final Limita a velocidade máxima no final do robot.
Força máxima na extremidade Limita a força máxima aplicada externamente na extremidade do robô.
Velocidade máxima do cotovelo Limita a velocidade máxima do cotovelo do robot.
Força máxima do cotovelo Limita a força externa máxima aplicada pelo cotovelo do robô.
Potência Limitar a quantidade máxima de trabalho mecânico efectuado pelo robot para o exterior.
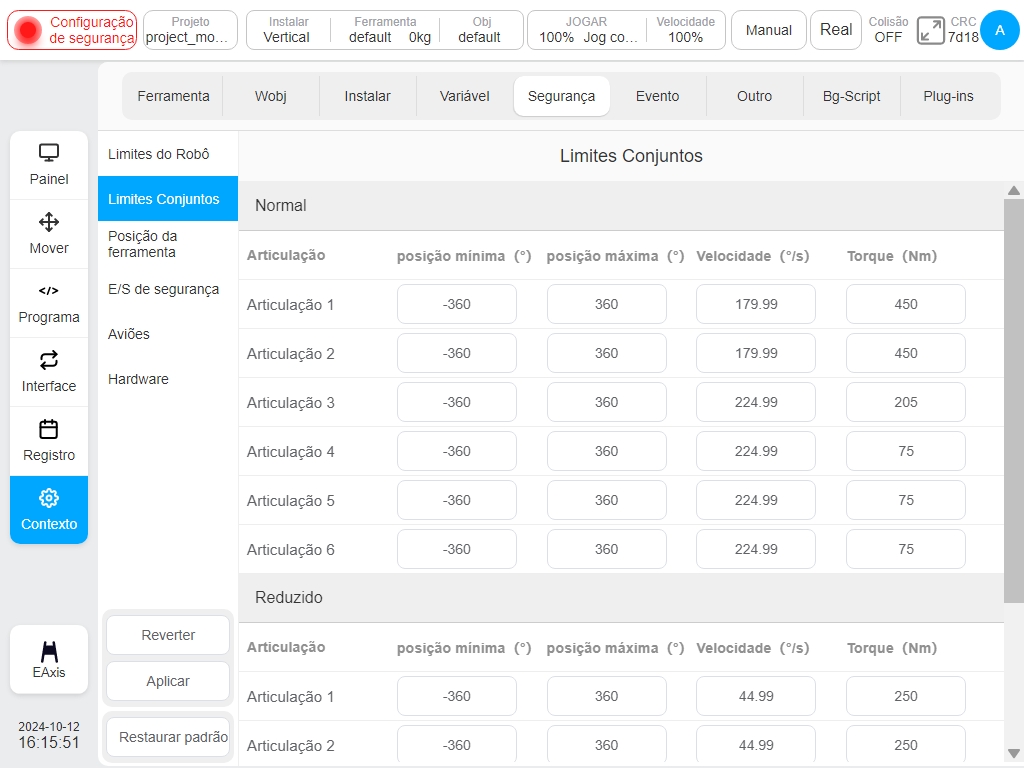
Parâmetros de segurança das juntas#
O limite do parâmetro da articulação é utilizado para limitar a gama de posições, a velocidade máxima e o binário máximo de cada articulação do robô. Pode configurar os valores dos seus parâmetros no modo normal e no modo reduzido
Gama de posições:Define as posições mínima e máxima de cada articulação.
Velocidade máxima:Define a velocidade angular máxima de cada articulação.
Binário máximo:Definir o binário máximo de cada junta
Segurança TCP#
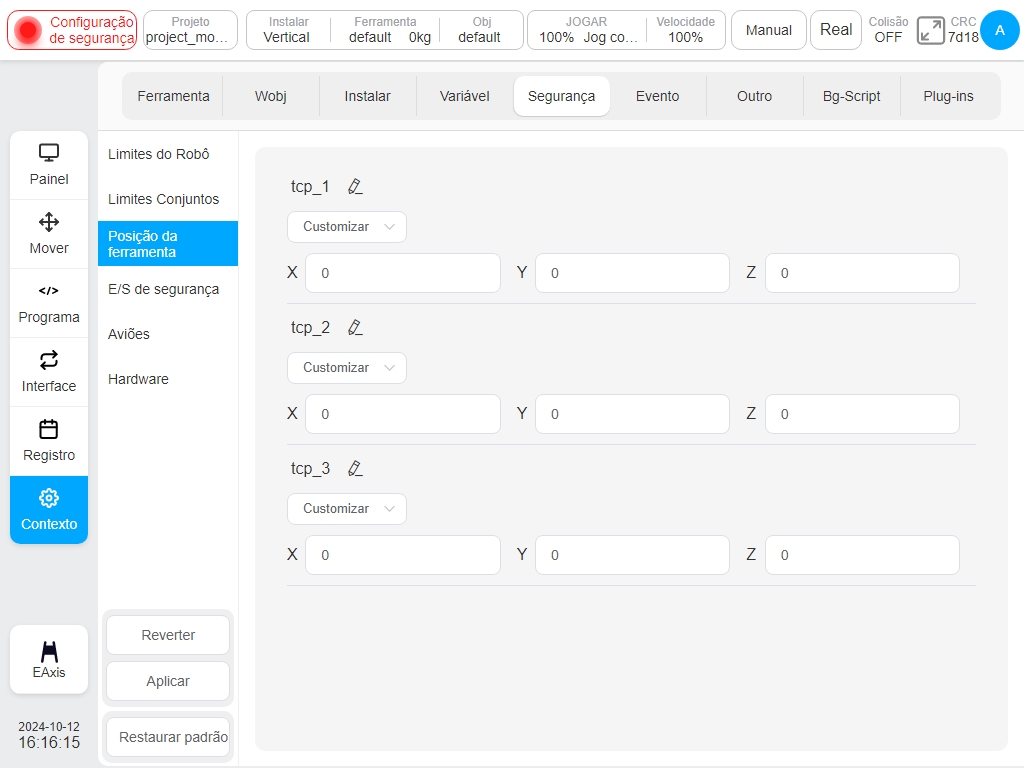
O sistema de segurança pode definir três conjuntos de desvios TCP que, quando configurados, serão utilizados pelo robô para a monitorização da velocidade e da posição. Qualquer posição ou velocidade TCP que exceda a definição de segurança accionará uma violação de segurança.
A monitorização da velocidade é a velocidade máxima da ferramenta entre os «Parâmetros de Segurança do Robô». A monitorização da posição é também designada por «Limite Virtual». Na caixa pendente, pode selecionar um TCP existente ou personalizar diretamente o valor XYZ. Quando se seleciona um TCP existente e se altera o valor nos campos de entrada X, Y e Z, o nome do TCP no menu pendente passa a ser «Personalizado», indicando o TCP recentemente definido.
A alteração das definições do TCP não afecta os parâmetros de segurança configurados.
Segurança IO#
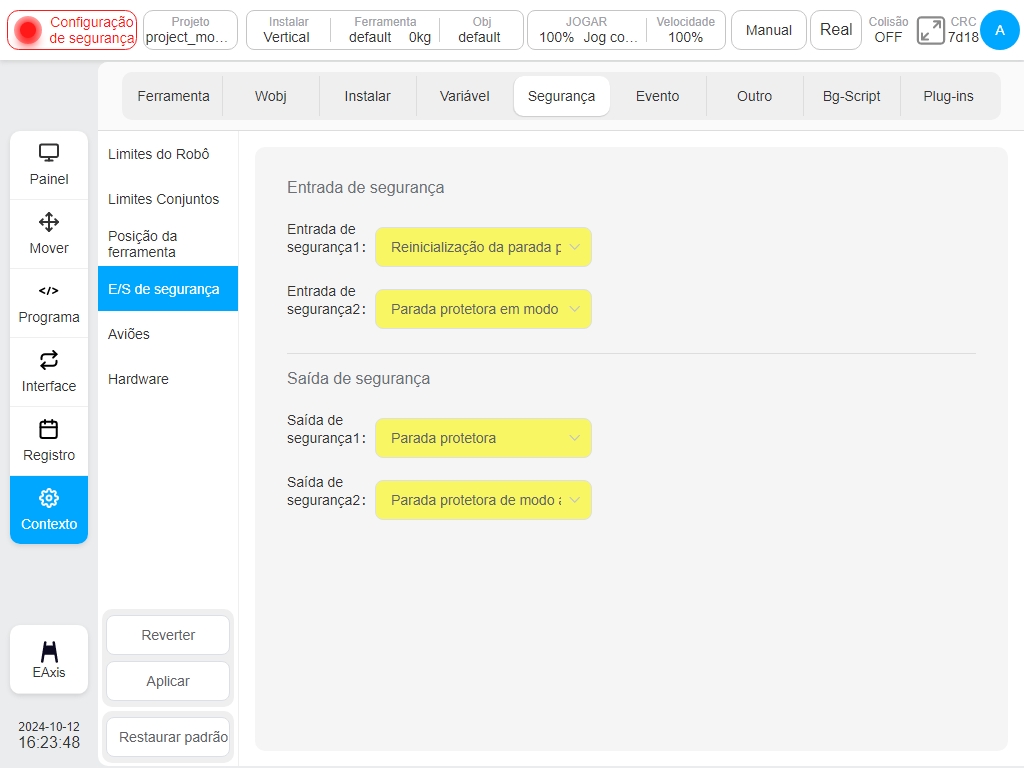
O módulo de E/S de segurança contém duas portas de entrada de segurança configuráveis e duas portas de saída de segurança configuráveis.
As caraterísticas de entrada de segurança incluem:
Entrada de reposição de guarda:Quando ocorre a paragem de guarda, a porta é acionada e o robô regressa ao estado normal
Entrada de paragem de proteção em modo automático: Após a configuração, quando o robô acciona a porta em modo automático, o robô executa uma paragem de proteção.
Entrada de reposição da proteção do modo automático:Quando a proteção do modo automático pára, a porta é acionada e o robô volta ao estado normal.
Entrada do Modo Reduzido:Após a configuração, esta porta é acionada e o robô passa para o modo reduzido. O robô irá abrandar para que os limites dos parâmetros cumpram os limites dos parâmetros de segurança no modo reduzido.
As caraterísticas de saída de segurança incluem:
Saída de paragem de guarda:Esta porta é acionada quando o robô está no estado de paragem de guarda
Saída de paragem de segurança em modo automático:Esta porta é acionada quando o robô está em paragem de segurança em modo automático
Saída do Modo Reduzido:Esta porta é acionada quando o robô está no modo reduzido.
Limite virtual#
As fronteiras virtuais podem ser utilizadas para limitar o espaço de trabalho do robô. Podem ser definidas seis fronteiras virtuais para limitar as ferramentas e os cotovelos do robô. Quando as ferramentas e os cotovelos do robô tocam na fronteira virtual, o robô executa uma paragem vigiada.
O indicador verde no lado direito da interface indica que o plano está ativado, enquanto o ecrã 3D pode mostrar a localização da fronteira virtual activada e a área efectiva da fronteira virtual. Quando um plano é selecionado, o plano correspondente é realçado no ecrã 3D.
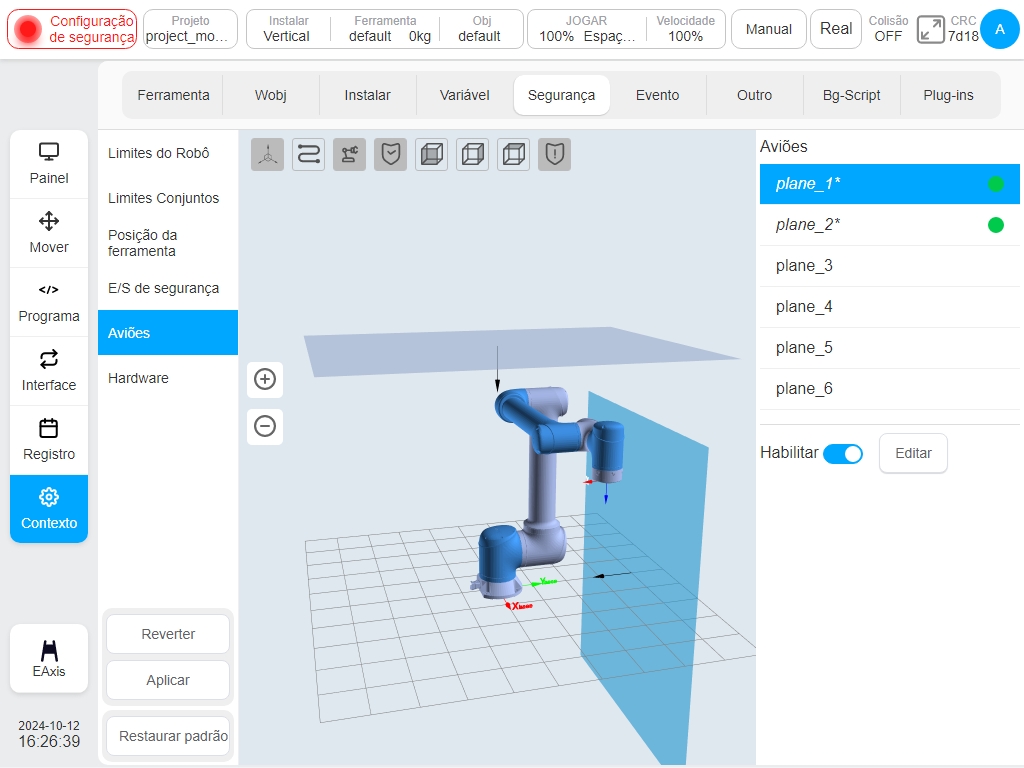
As fronteiras virtuais são definidas da seguinte forma:
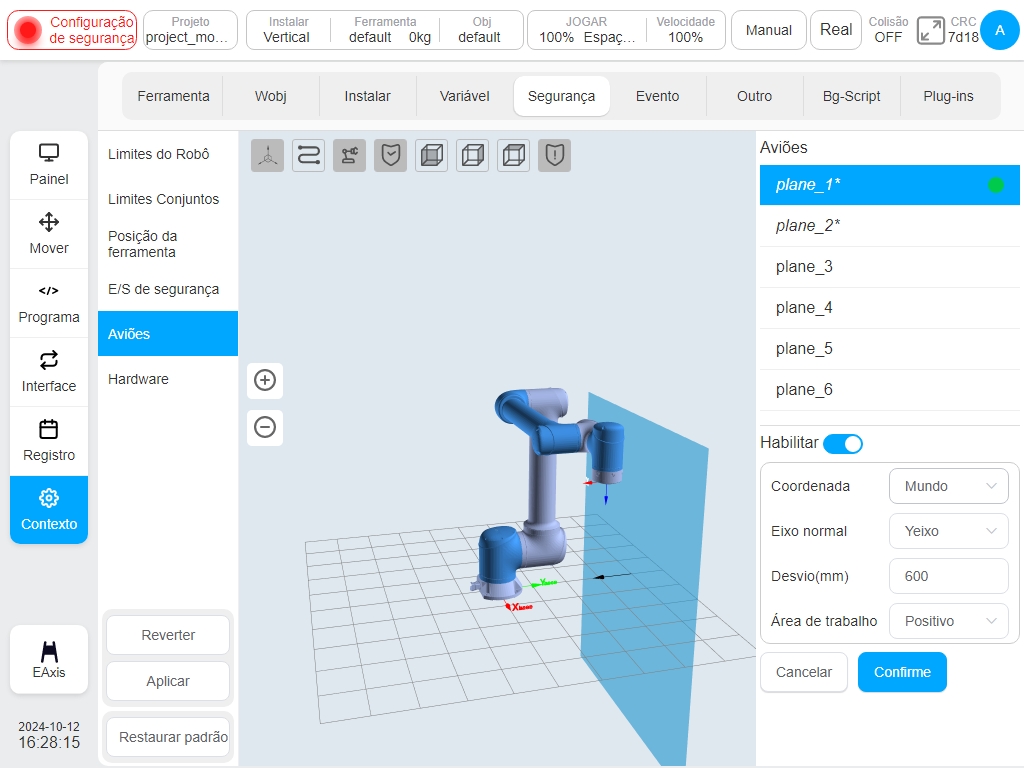
Selecionar um sistema de coordenadas de referência, que pode ser o sistema de coordenadas mundial, o sistema de coordenadas de base ou o sistema de coordenadas da peça de trabalho definido na configuração; selecionar um dos eixos (X, Y, Z) do sistema de coordenadas de referência como o eixo normal do plano virtual e definir a distância de desvio ao longo do eixo; um valor positivo da distância de desvio indica um desvio positivo ao longo do eixo de coordenadas e um valor negativo indica um desvio negativo ao longo do eixo de coordenadas. Desta forma, é determinado um plano e, em seguida, a área de atividade efectiva do braço do robô é selecionada para estar desse lado do plano. Por exemplo, se o sistema de coordenadas de referência for escolhido como o sistema de coordenadas de base, o eixo Z for escolhido como o eixo normal e a distância de desvio for definida para 600 mm, então o plano virtual é formado pelo desvio do plano XoY do sistema de coordenadas de base para o eixo Z na direção positiva em 600 mm.
A figura seguinte mostra a interação correspondente, selecionar um plano, clicar no botão «Enable» (Ativar) e no botão «Edit» (Editar), selecionar o sistema de coordenadas de referência, o eixo normal, introduzir a distância de desvio, selecionar a área efectiva. Clique no botão «OK» para definir o limite virtual, as setas apresentadas no plano virtual indicam a área ativa do robô.
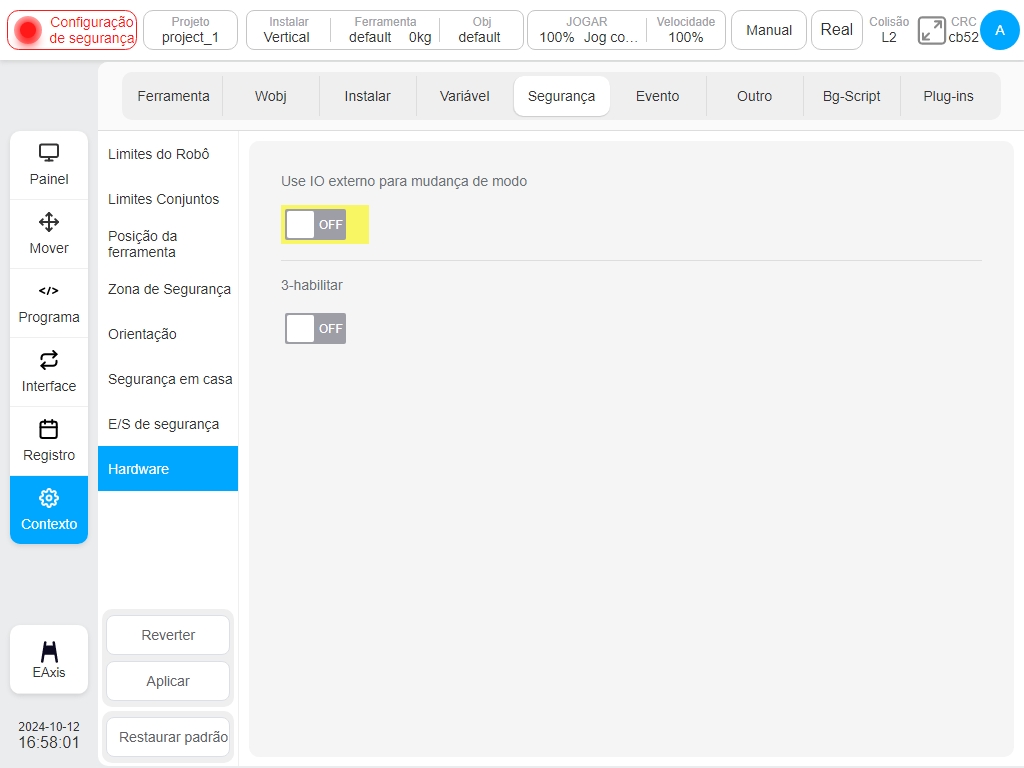
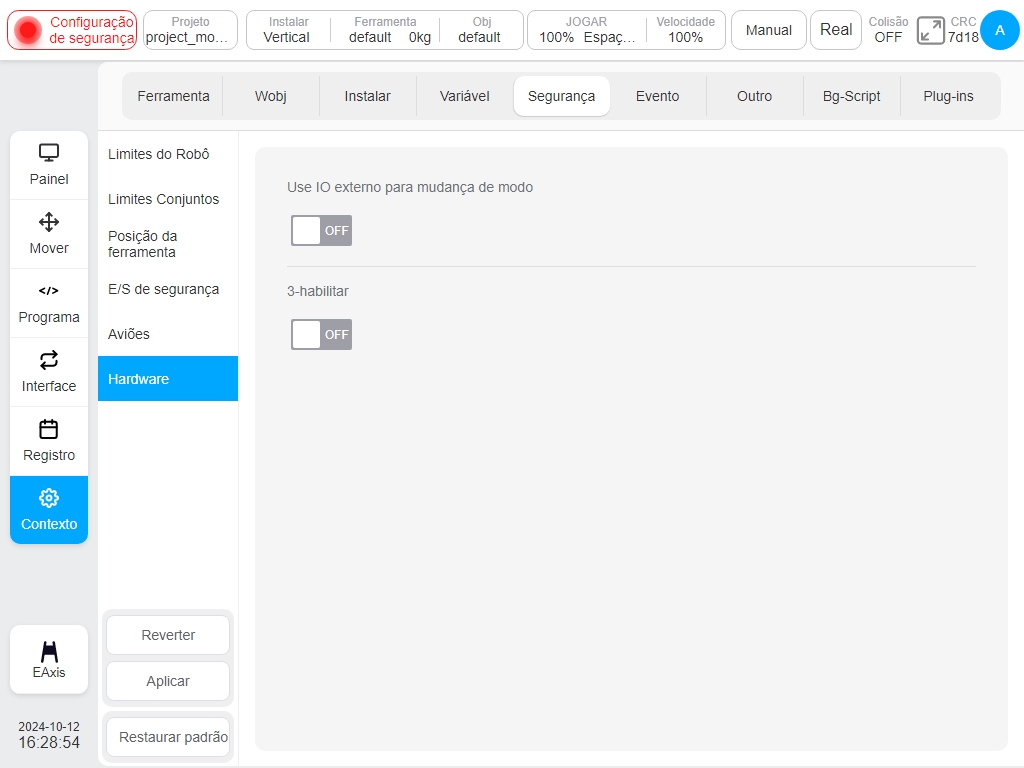
Hardware#
Inclui ativação de E/S externas para comutação de modo e entrada de ativação de três posições.
Ativar E/S externas para comutação de modo: Quando este item está ativado, a comutação de modo manual pode ser realizada através de E/S externas. A função de comutação de modo na barra de estado da interface é inválida.
Entrada de ativação de três posições:Quando este item está ativado, entretanto, quando o robô está no modo manual, o robô só pode ser movido quando o interrutor de três posições na consola de programação está na posição intermédia. Quando o interrutor de três posições está na posição não intermédia em qualquer altura durante o movimento do robô, a função de paragem do robô é activada.
DucoSafety V2.0#
Ver configurações de segurança#
Clique no botão «Verificação de segurança» na barra de estado. É apresentada a seguinte caixa de diálogo para visualizar os parâmetros de configuração de segurança atualmente activados.
O utilizador pode também visualizar os parâmetros de configuração de segurança na página de definições - Definições de segurança.
Pedido de alteração da configuração de segurança#
Antes de alterar a configuração de segurança, o utilizador deve utilizar a palavra-passe para desbloquear o robô. Entrar na página «Setup» - «Security Configuration», clicar no botão «Unlock» no canto inferior esquerdo, apenas no caso de falha de energia pode ser desbloqueado, introduzir a palavra-passe (a palavra-passe de início de sessão do utilizador atual com sessão iniciada) e, em seguida, entrar no modo de configuração dos parâmetros de segurança depois de passar a verificação. Neste momento, a área de visualização do estado na barra de estado mostra «Security Parameter Configuration» (Configuração dos parâmetros de segurança).
Depois de clicar no botão «Confirmar», é apresentada uma caixa de diálogo para carregar os parâmetros de segurança, como mostra a figura.
Após a configuração dos parâmetros de segurança, o sistema apresenta os parâmetros de segurança configurados numa caixa de diálogo para verificação. Verificar e confirmar a figura seguinte. Clique no botão «OK» para definir os parâmetros de segurança. Depois de a configuração ser bem sucedida, a verificação de segurança acima da barra de estado muda.
Parâmetro de segurança Descrição#
Esta secção descreve os parâmetros de configuração de segurança do robô.
Modo de segurança#
Modo normal: O modo de segurança é ativado por defeito.
Modo de redução: Este modo pode ser ativado através da entrada de segurança IO.
Modo de recuperação:Quando os parâmetros de movimento reais do robô excedem o limite de segurança, fazendo com que o robô pare, o modo de recuperação será ativado e o utilizador pode mover o robô dentro do limite de segurança.
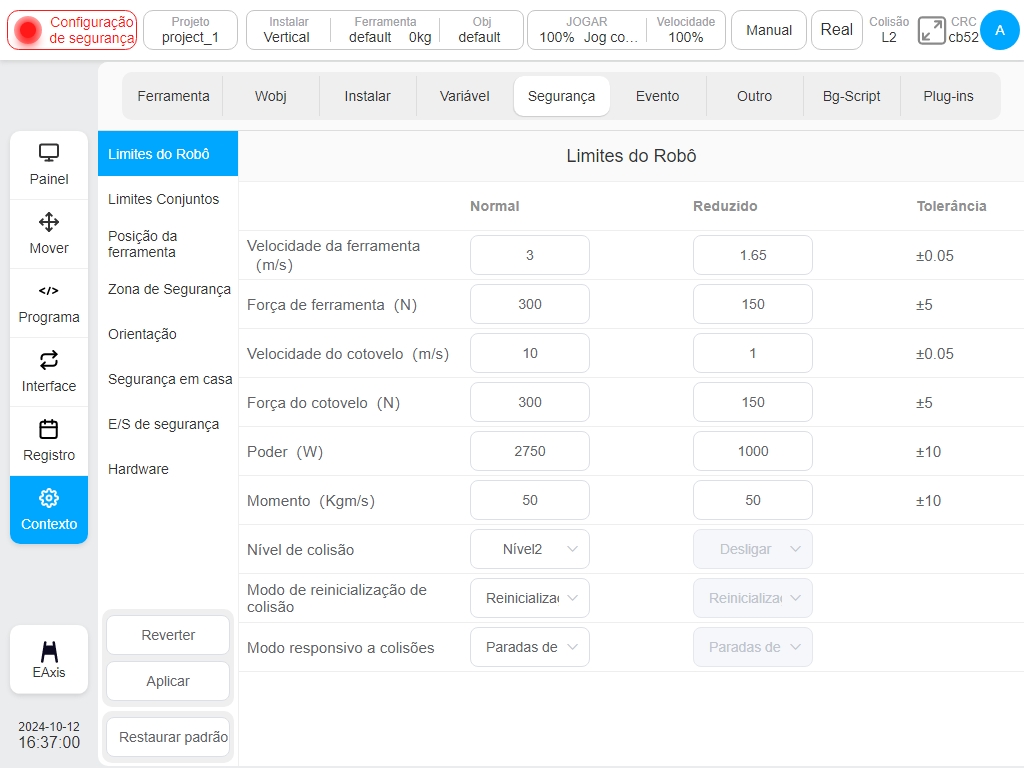
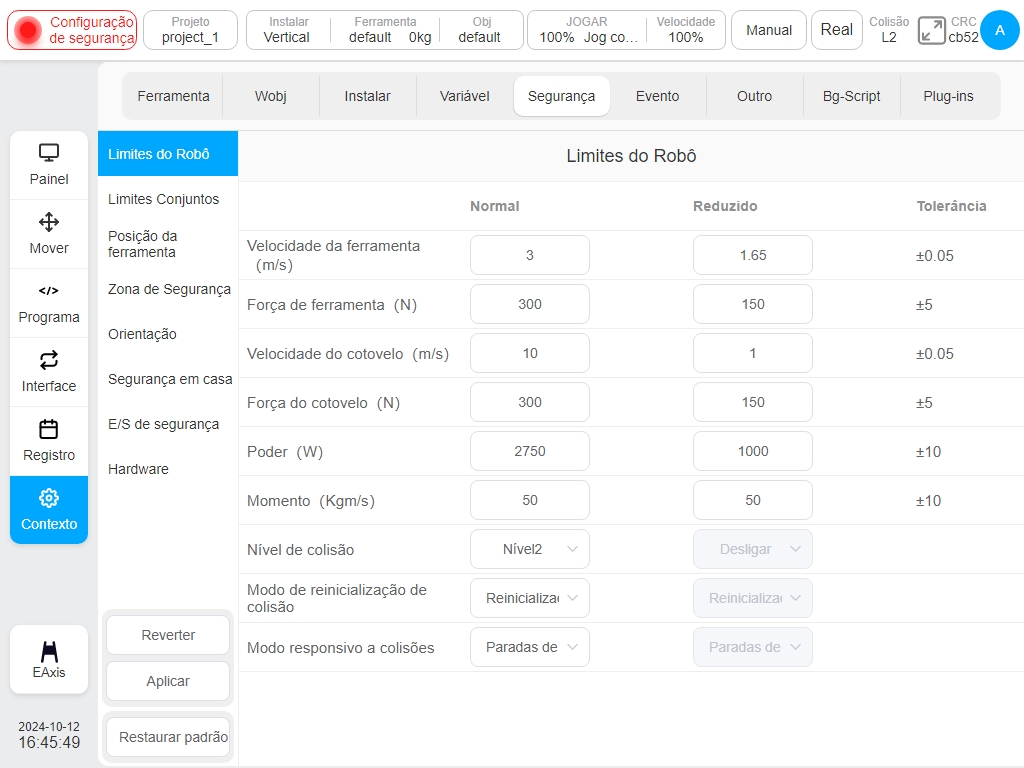
Parâmetros de segurança do robô#
Os parâmetros do robô são utilizados para limitar o movimento geral do robô. O utilizador pode configurar os valores dos seus parâmetros no modo normal e no modo de redução.
Velocidade máxima da extremidade Limita a velocidade máxima da extremidade do robot.
Força máxima final Limita a força máxima aplicada externamente na extremidade do robô.
Velocidade máxima do cotovelo Limita a velocidade máxima do cotovelo do robot.
Força máxima do cotovelo Limita a força externa máxima aplicada pelo cotovelo do robô.
Potência Limita o trabalho mecânico máximo realizado pelo robô ao exterior e a extremidade da carga do robô é considerada como parte do corpo do robô.
Momento máximo Limita o momento máximo da saída do robô e a extremidade da carga do robô é considerada como parte do corpo do robô.
Nível de deteção de colisão Sensibilidade do robô para detetar colisões com o mundo exterior, quanto mais alto o nível, maior a sensibilidade.
Modo de reinicialização de colisão Um método para reinicializar o robô após uma colisão.
Modo de reação à colisão Um método de reação do robô após uma colisão.
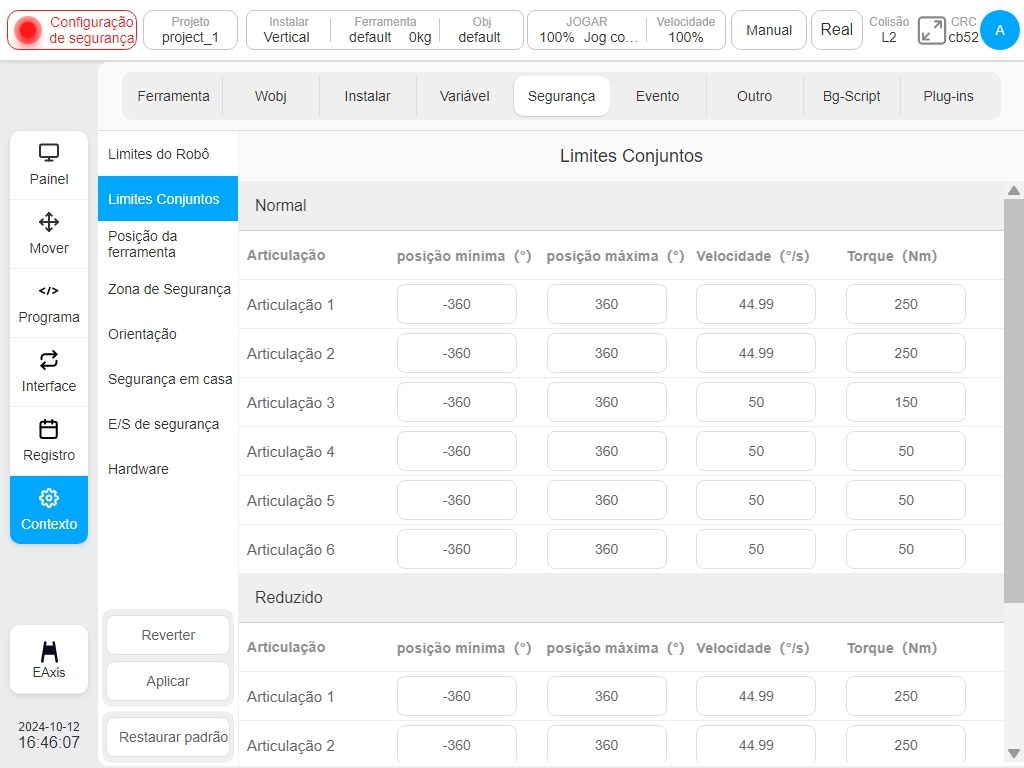
Parâmetros de segurança das juntas#
O limite do parâmetro da articulação é utilizado para limitar a gama de posições, a velocidade máxima e o binário máximo de cada articulação do robô. O utilizador pode configurar os valores dos seus parâmetros tanto no modo normal como no modo reduzido.
Gama de posições:Define as posições mínima e máxima de cada articulação.
Velocidade máxima:Define a velocidade angular máxima de cada articulação.
Binário máximo:Define o binário máximo de cada junta.
TCP e ferramentas de segurança#
O sistema de segurança pode definir três conjuntos de desvios TCP, que, quando configurados, serão utilizados pelo robot para a monitorização da velocidade e da localização. Qualquer uma das posições e velocidades TCP que exceda a definição de segurança desencadeará uma violação de segurança.
A monitorização da velocidade é a velocidade linear máxima do centro do TCP de segurança do robô no espaço nos “Parâmetros de Segurança do Robô”, enquanto a monitorização da localização também é chamada de “Área Segura”. Podem ser definidos três TCP de segurança, havendo duas formas de definir os TCP, escolhendo o sistema de coordenadas da ferramenta definido nas variáveis globais ou personalizando o valor do sistema de coordenadas de entrada. Quando se utiliza um sistema de coordenadas da ferramenta predefinido, o sistema de coordenadas da ferramenta é selecionado e o valor do sistema de coordenadas da ferramenta é apresentado na caixa de introdução X, Y, Z. Se os valores X, Y, Z forem modificados, o sistema de coordenadas torna-se personalizado. Se o valor do sistema de coordenadas correspondente na variável global for modificado e não corresponder ao valor do sistema de coordenadas utilizado nas definições de segurança actuais, aparecerá um ícone de alerta “! Quando é selecionada a opção «Dados de entrada personalizados», os valores de X, Y, Z, Rx, Ry, Rz e o raio da esfera do envelope são editados diretamente.
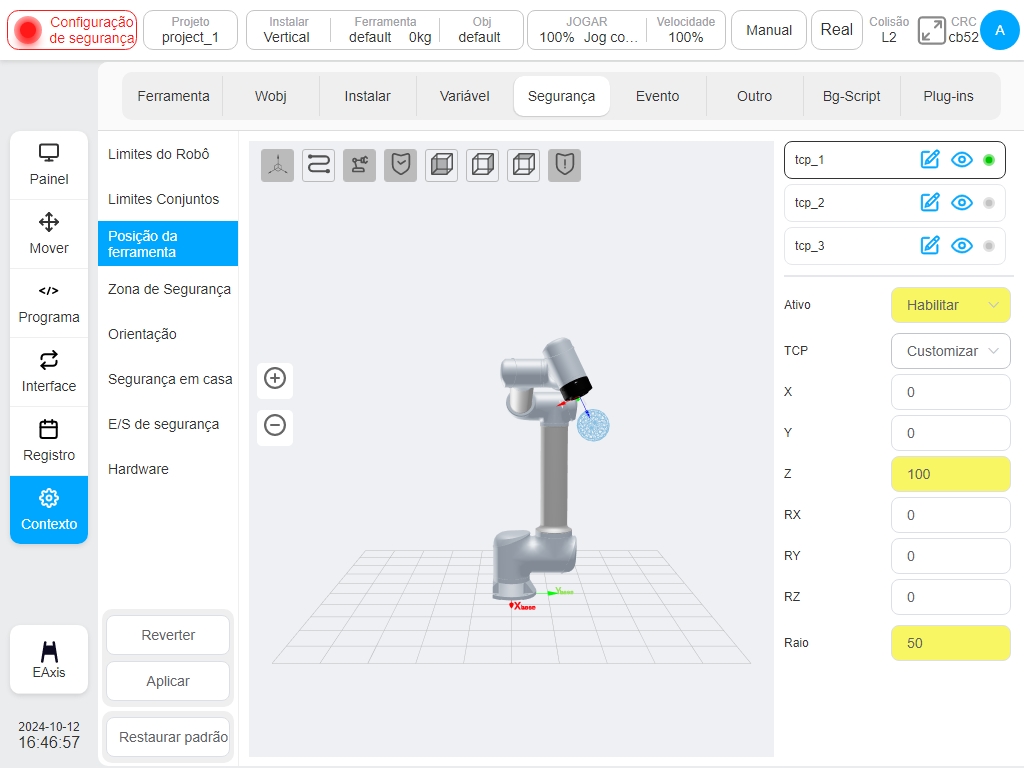
Cada TCP de segurança pode ser definido como desativado, sempre ativo, modo automático ativo, configuração de combinação de segurança 1, configuração de combinação de segurança 2, em geral, cinco tipos diferentes de condições de ativação. Quando os três TCP estão desactivados, o sistema de controlo de segurança assume por defeito um sistema de coordenadas flangeado com um raio de esfera de 50 mm. O estado da configuração do TCP é apresentado na lista de configuração do TCP. Se um determinado TCP estiver desativado, o estado correspondente é apresentado a cinzento. O TCP de segurança configurado pode apresentar o sistema de coordenadas e a esfera envolvente na área de visualização 3D e pode transmitir o nome do TCP correspondente com o ícone  apresentado e oculto. Clique junto ao ícone do nome TCP
apresentado e oculto. Clique junto ao ícone do nome TCP  para alterar o nome TCP predefinido. O TCP de segurança que não está desativado é apresentado
para alterar o nome TCP predefinido. O TCP de segurança que não está desativado é apresentado  . Caso contrário, ele será exibido
. Caso contrário, ele será exibido  .
.
Zona de segurança#
Os tipos de definição das zonas de segurança incluem o plano, o retângulo e o cilindro. Os utilizadores podem definir até seis zonas espaciais independentes. Clique no ícone ao lado do nome da zona de segurança para exibir ou ocultar a zona de segurança configurada na zona de visualização 3D. E o ícone junto ao nome da zona de segurança (por exemplo, o nome predefinido zona_1) pode ser clicado para alterar o seu nome. será apresentado se a zona de segurança não estiver desactivada, caso contrário será apresentado.
As configurações de ativação da zona de segurança incluem: Desativado, Sempre ativo, Modo automático ativo, Configuração do grupo de segurança 1 e Configuração do grupo de segurança 2.
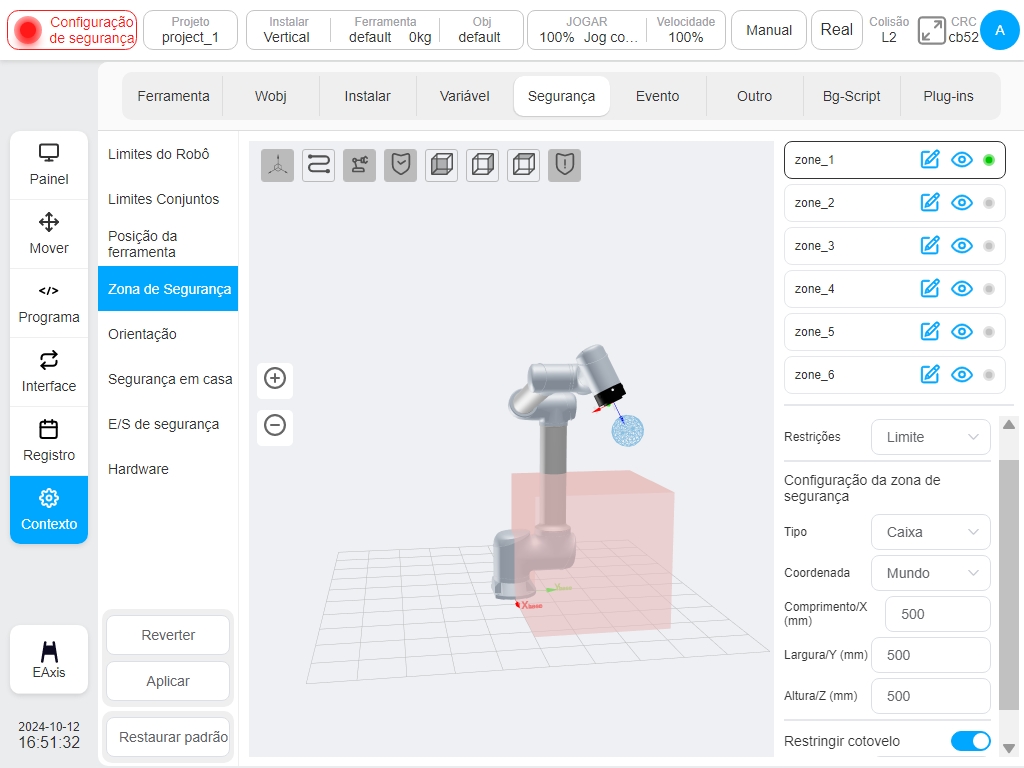
A resposta da zona de segurança ao limite refere-se à resposta do robot que entra na zona de segurança a partir do exterior e que se desloca para além do limite a partir do interior. Existem dois modos de resposta, nomeadamente, limitar o movimento para além do limite e acionar o modo de redução ao entrar na zona. Quando o limite de seleção ultrapassa o limite, é descrita a resposta do robô que se desloca para além do limite. Quando o modo de redução de disparo é selecionado, é descrita a resposta do robô que entra na zona a partir do exterior e o modo normal é restaurado quando o robô sai da zona.
A zona de espaço também pode ser definida para incluir limites de cotovelo, sendo o intervalo de espaço do cotovelo definido sob a forma de um raio esférico.
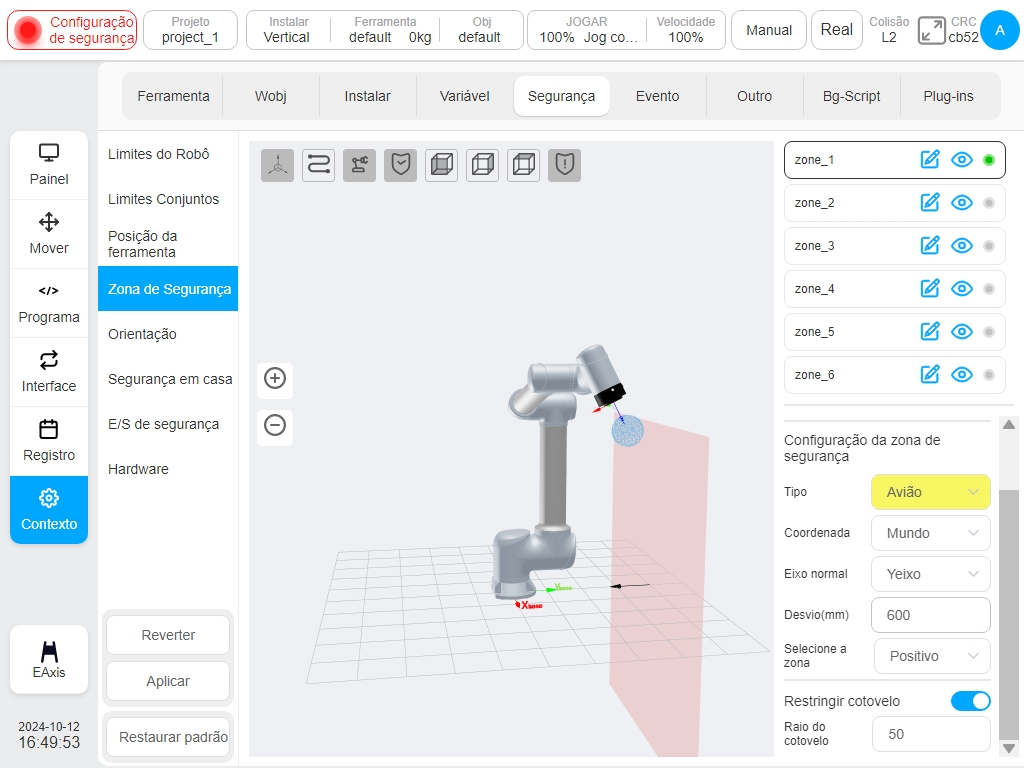
Quando o tipo de zona de configuração é plano, a referência da zona plana é baseada no sistema de coordenadas mundial/sistema de coordenadas da base/peça de trabalho definida e o plano é determinado definindo a normal e o desvio normal do plano. As Definições do plano podem ser definidas para entrar em vigor através da Seleção de uma Região e a direção correspondente é apresentada através de uma seta preta na zona 3D.
Quando o tipo de zona de configuração é cuboide espacial, a base de configuração da zona cuboide baseia-se no sistema de coordenadas mundial/sistema de coordenadas da peça de trabalho de base/definição e o sistema de coordenadas da peça de trabalho é utilizado como um ponto de canto do cuboide com as três direcções do eixo de coordenadas correspondentes ao comprimento (X), largura (Y) e altura (Z), respetivamente. O comprimento, a largura e a altura variam de -3000mm a 3000mm.
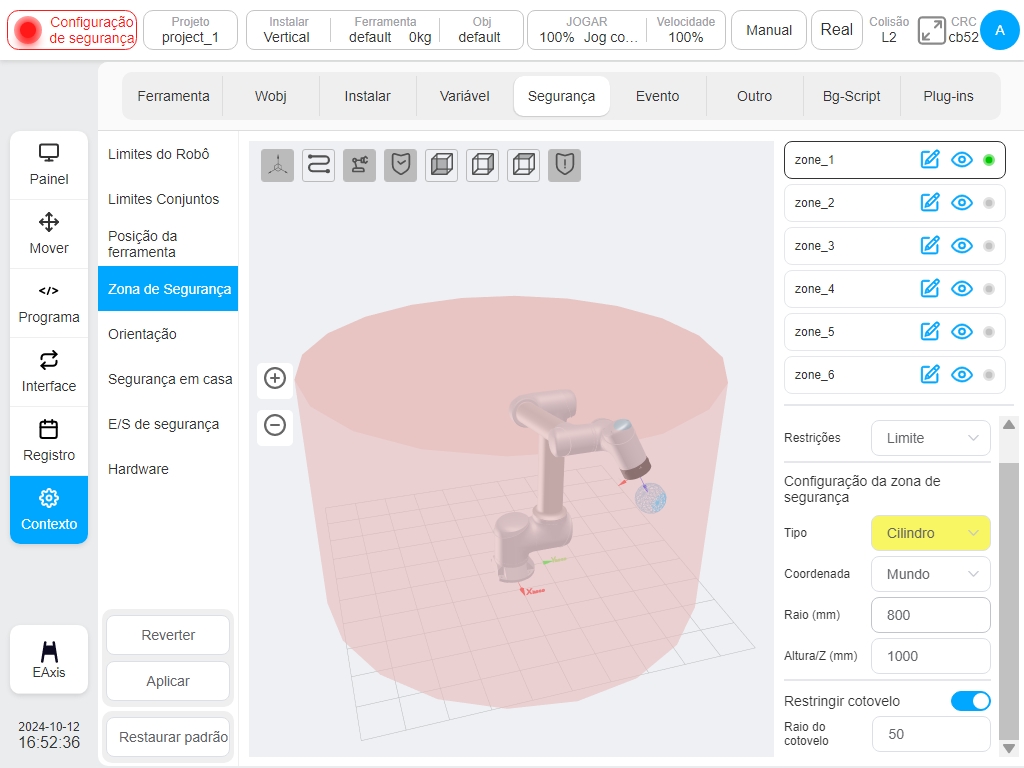
Quando o tipo de zona de configuração é um cilindro espacial, a referência de definição é baseada no sistema de coordenadas mundial/sistema de coordenadas da base/conjunto de peças com o sistema de coordenadas da peça como centro do plano do círculo, a direção Z aponta para a direção da altura, e o raio e a altura podem ser definidos. O raio varia de 0 a 3000mm, e a altura varia de -3000mm a 3000mm.
Zona de postura de segurança#
A definição da zona de postura de segurança. A zona de postura refere-se à formação de um ângulo de cone em torno de um vetor de direção no sistema de coordenadas de base do robô. A restrição de postura apenas restringe o eixo Z do TCP do robot à zona de postura. Os utilizadores podem definir até três zonas de postura. Uma única zona de postura pode ser exibida ou ocultada clicando no ícone ao lado do nome à direita da área de postura, que é definido como padrão para exibição. O ícone após o nome pode ser clicado para modificar o nome da zona de postura. será exibido se a área de postura não estiver desativada; caso contrário, será desativado.
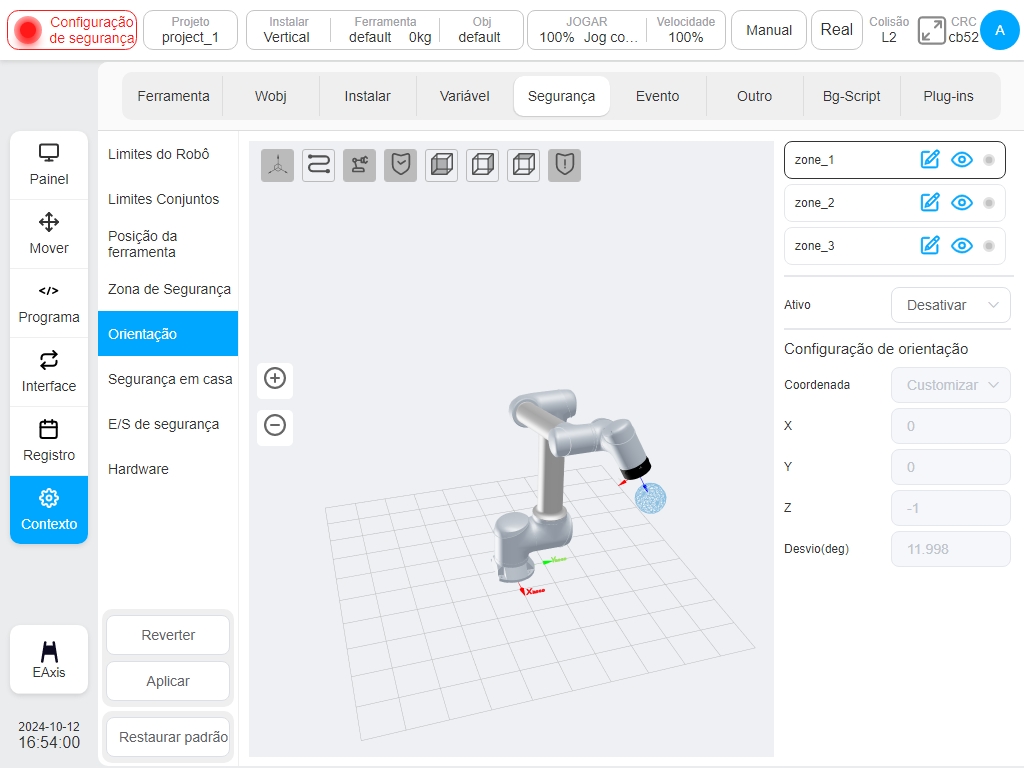
A zona de postura de segurança pode ser activada em cinco modos: Desactivada, Sempre ativa, Modo automático ativo, Configuração de grupo de segurança 1 e Configuração de grupo de segurança 2. A zona de postura de segurança é diferente da zona de segurança na medida em que apenas a direção do eixo Z do TCP é restringida e existe apenas um modo de resposta que desencadeia a paragem de proteção após a zona ser ultrapassada.
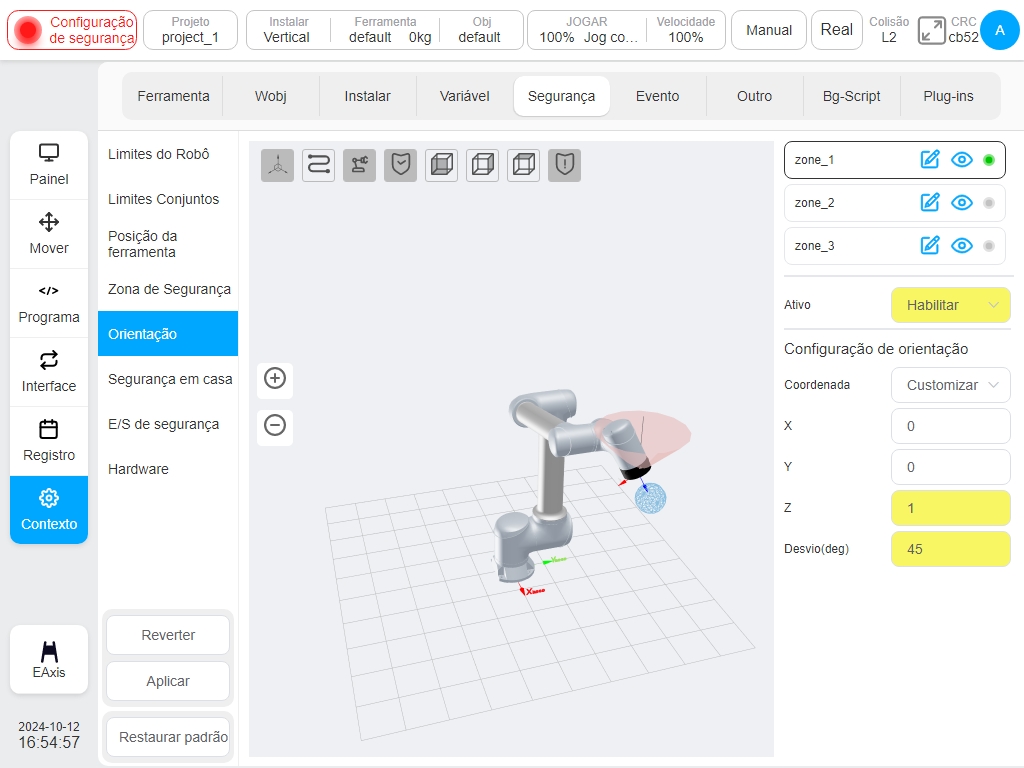
Existem três formas de definir um sistema de coordenadas de referência para a zona de postura de segurança: Custom, capturar a pose TCP atual e defini-la através de um sistema de coordenadas da peça de trabalho predefinido. Quando a atitude TCP atual é selecionada, a direção do eixo z do TCP atual é tomada como a direção de referência da zona de postura e a direção é convertida para o sistema de coordenadas da base do robô para descrever a direção do vetor X, a direção do vetor Y, a direção do vetor Z. Se o valor for modificado manualmente, tornar-se-á um modo personalizado. Quando definido pelo sistema de coordenadas da peça de trabalho, a direção do eixo Z do sistema de coordenadas da peça de trabalho é tomada como a direção de referência da zona de postura e convertida para o sistema de coordenadas da base do robô, o valor será alterado para um modo personalizado após modificação manual.
Se a orientação do sistema de coordenadas da peça de trabalho tiver sido alterada externamente, é apresentado um ícone de aviso no sistema de coordenadas de referência. O ângulo de desvio da zona varia de 5 a 180 graus. Por exemplo:
Segurança em casa#
Para as definições de «Casa segura», a monitorização da «Casa segura» sincroniza as definições de localização da casa na página de definições «Outros». Se a localização nas definições de «Residência de segurança» for diferente da localização da residência nas definições de «Outros», é apresentado um ícone de lembrete nas definições de «Sincronizar residência». Se as definições não forem sincronizadas, a posição inicial do sistema está sujeita às definições de segurança. As definições do controlador de segurança prevalecem para o ponto inicial “Press Home” na interface móvel e para a saída de sinais iniciais de outras portas (por exemplo, porta 2001) do robô. O ponto inicial na página de definições «Outros» é utilizado apenas como registo e não serve de base para avaliar o ponto inicial. O limiar de monitorização do ponto inicial pode ser definido e o valor varia de 1 a 5°.
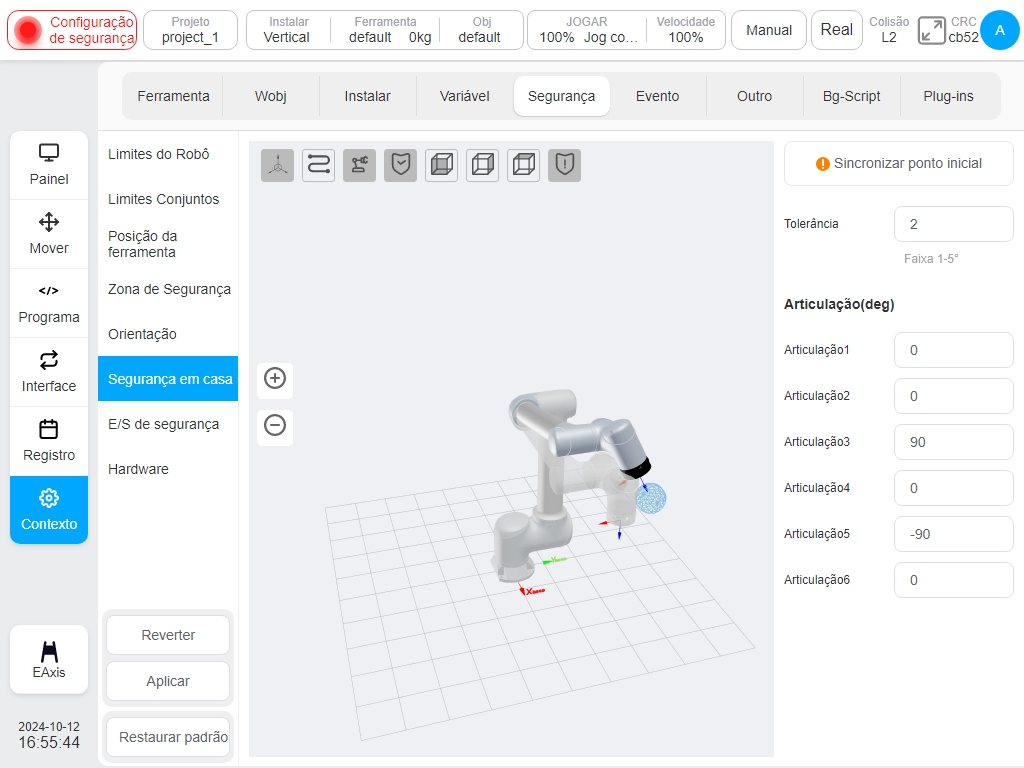
Quando a opção Sincronizar local de origem é selecionada, é apresentado o ângulo de articulação do local de origem. E o modelo do robô na área de visualização do modelo 3D é atualizado para a localização correspondente.
Quando a posição inicial de segurança é definida e a saída de posição inicial é configurada na E/S de segurança (consulte a Secção 6.2.3.8), todos os ângulos das articulações do robô estão dentro do intervalo de posição inicial definido (ponto de ajuste - limiar, ponto de ajuste + limiar) e a velocidade está próxima de 0°/s (para filtrar a excentricidade normal do codificador). A velocidade da junta predefinida pelo sistema é inferior a 2°/s), e dura 500 milissegundos (predefinida pelo sistema e não pode ser configurada), uma vez que o sinal é atingido pela saída de segurança externa da localização inicial.
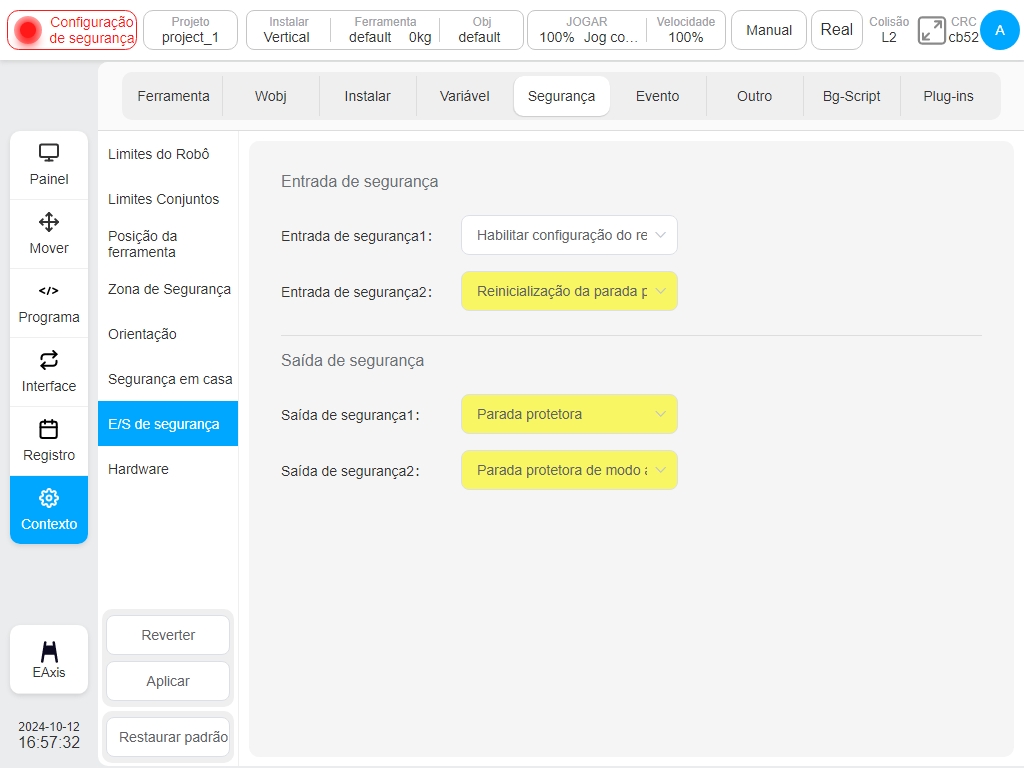
Segurança IO#
O módulo de E/S de segurança contém duas portas de entrada de segurança configuráveis e duas portas de saída de segurança configuráveis.
As caraterísticas de entrada de segurança incluem:
Entrada de reinicialização de proteção:Quando ocorre a paragem de proteção, a porta é acionada e o robô volta ao estado normal.
Entrada de paragem de proteção em modo automático: Após a configuração, quando o robô acciona a porta em modo automático, executa uma paragem de proteção.
Entrada de reinicialização da proteção do modo automático: Quando a paragem da proteção do modo automático é efectuada, a porta é acionada e o robô volta ao estado normal.
Entrada do Modo Reduzido:Após a configuração, esta porta é acionada e o robô passa para o modo reduzido. O robô irá abrandar para que os limites dos parâmetros cumpram os limites dos parâmetros de segurança no modo reduzido.
Configuração da combinação de segurança 1/2:Quando a porta da configuração da combinação de segurança 1 ou da configuração da combinação de segurança 2 é acionada, todas as caraterísticas de segurança configuradas na configuração da combinação de segurança 1 ou na configuração da combinação de segurança 2, incluindo ferramentas de segurança, zonas de segurança e áreas de postura de segurança, serão activadas e monitorizadas.
As caraterísticas de saída de segurança incluem:
Saída de paragem de proteção:Esta porta é acionada quando o robô está no estado de paragem de proteção.
Saída de Paragem de Proteção em Modo Automático: Esta porta é acionada quando o robô está em modo automático de paragem de proteção.
Saída do modo de redução:Esta porta é acionada quando o robô está em modo de redução.
HOME Location:Esta porta é acionada quando o robô está perto da localização de segurança da casa;
Hardware#
Inclui E/S externas activadas para comutação de modo e três entradas de ativação de posição
Ativar E/S externas para comutação de modo: Se este item estiver ativado, a comutação de modo manual pode ser realizada através de E/S externas. A função de comutação de modo na barra de estado da interface é inválida.
Entrada de ativação de três posições: Quando esta opção está activada, se o robô estiver no modo manual, o robô só pode ser movido quando o interrutor de três posições na consola de programação estiver na posição intermédia. Quando o interrutor de três posições está na posição não intermédia em qualquer altura durante o movimento do robô, o robô será colocado em pausa.