


机器人#
点击机器人进入机器人配置页面,页面包含机器人的安装方式、TCP标定;
1.安装方式#
机器人配置页面默认进行安装方向配置,可选择竖装、横装、倒装或者自定义的方式;选择后点击设置进行保存;

2.TCP标定#
TCP标定子页面显示系统工具TCP列表,列表内容包含工具名称、位置坐标系信息、质量、质心、及操作项。如下图所示。

新增#
点击列表右上角新增按钮,进入添加工具页面,可设置工具名称、坐标系信息、负载信息设置。
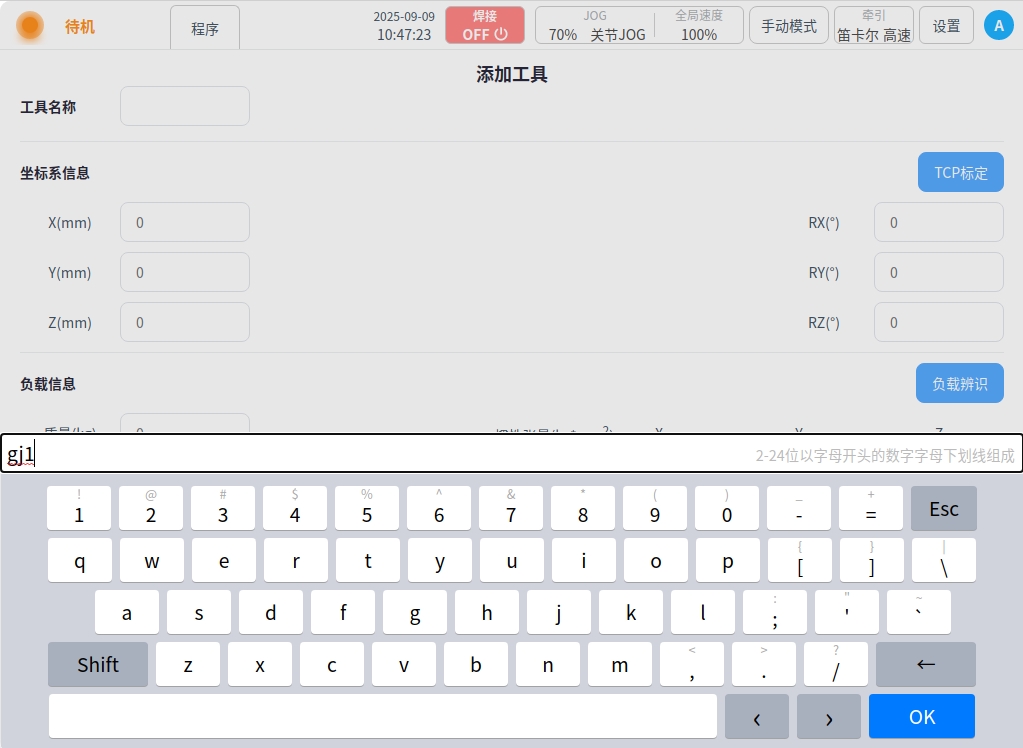
工具名称
点击工具名称输入框,可弹出键盘输入框,输入工具名称,如“gj1”,点击‘OK’保存。
坐标系信息
工具坐标信息可通过手动输入或者TCP标定获取。手动输入直接在输入框中输入对应的坐标信息。 如需TCP标定,则点击右侧“TCP标定”按钮,进入TCP标定流程如下图所示。

首先,需要以不同姿态将工具点贴合至标定针固定点,即示教好P1-P4点,且建议点与点之间的姿态角度变化在45°至90°之间, 这样有利于提高TCP标定精度。以P1点为例,单击P1点处的“示教”按钮,界面会跳转到“机器人控制”页面,如下图所示。
JOG机器人到目标点后,单击“记录当前点”,界面会跳回TCP标定流程界面,且示教好一个标定点后,对应标定点后的红色圆点会变成绿色。 也可通过示教器物理按钮直接JOG机器人到目标点位后,直接单击标定页面“记录当前点”。 示教过程中,如果当前示教点位不满足限制条件会弹框提示如下图。
依次示教好P1-P4全部点位后,单击标定流程页面右下角“下一步”按钮,进入TCP姿态标定阶段。TCP姿态标定有两种形式:自定义和两点设置, 默认为自定义,如下图所示。

设置好工具对应法兰坐标系轴向偏转角度后,单击“下一步”按钮,进入完成标定阶段如下图所示,会显示标定结果和误差信息。 用户可通过误差信息来判断该次标定质量,从而决定是否需要加载此坐标系。如果需要加载此坐标系,单击“确认”按钮, 即可在TCP标定页面显示标定后的工具坐标系有关信息,并将标定出的TCP结果加入工具坐标系列表中,以及将其设置为默认且当前的工具坐标系; 否则单击“取消”按钮,或者单击“上一步”返回进行重新示教点位。
Caution
定结果的误差值,真实含义是计算得到的TCP位置与4个标定点位之间距离的标准差。该数据可作为标定结果的参考,但不能作为标定精度的绝对依据,实际精度以应用效果为准。
TCP的标定结果,通常以平均误差小于2mm为准。
当TCP姿态标定阶段选择“两点设置”时, 如下图所示。P5点可选项有O-P5为工具坐标系X+方向 / Y+方向 / Z+方向, P6点对应可选项有O-P5-P6为工具坐标系XOY平面/XOZ平面、O-P5-P6为工具坐标系XOY平面/YOZ平面、O-P5-P6为工具坐标系XOZ平面/YOZ平面。 以按O-X-Y-Z轴顺序确定工具坐标系姿态为例:点O为当前工具位置所在位置,首先沿期望工具坐标系X+方向移动工具位置至点P5, 接着沿期望工具坐标系Y+方向移动工具位置至点P6。
设置示教好P5、P6后,单击“下一步”按钮,同样地进入完成标定阶段,会显示标定结果和误差信息。 用户可通过误差信息来判断该次标定质量,从而决定是否需要加载此坐标系。同样地,如果需要加载此坐标系,单击“确认”按钮即可,否则单击“取消”按钮, 或者单击“上一步”返回进行重新示教点位。
单击“确认”按钮,返回添加工具页面,坐标系信息中显示标定好的坐标如下图所示。

负载信息 负载信息可对负载项的质量以及坐标进行设置,可通过手动输入或者负载辨识获取。手动输入直接在输入框中输入对应的坐标信息。 如需负载辨识,则点击右侧负载辨识,进入负载辨识页面。按照图中所示姿态进行记录,记录过程参考上方TCP标定过程,如下图所示:

点位记录后,点击下一步,可查看识别结果,结果正确后点击确定。

若各点位姿态记录不正确,则会提示错误,请重新进行记录;

工具名称、坐标系信息、负载信息设置完成后,点击完成按钮,返回到工具TCP列表,可在列表中查看新增的工具TCP信息。

点击工具TCP列表后的‘…’操作按钮,可进行设为当前,编辑、删除操作。
设为当前: 将此工具TCP设为当前系统的工具TCP。
编辑: 编辑工具TCP信息。
删除: 删除工具TCP信息。