装箱姿态设置#
装箱姿态设置子页面用于机器人打包装箱位置时各个关节角度值,以及设置输入框及部分按钮,如下图所示。

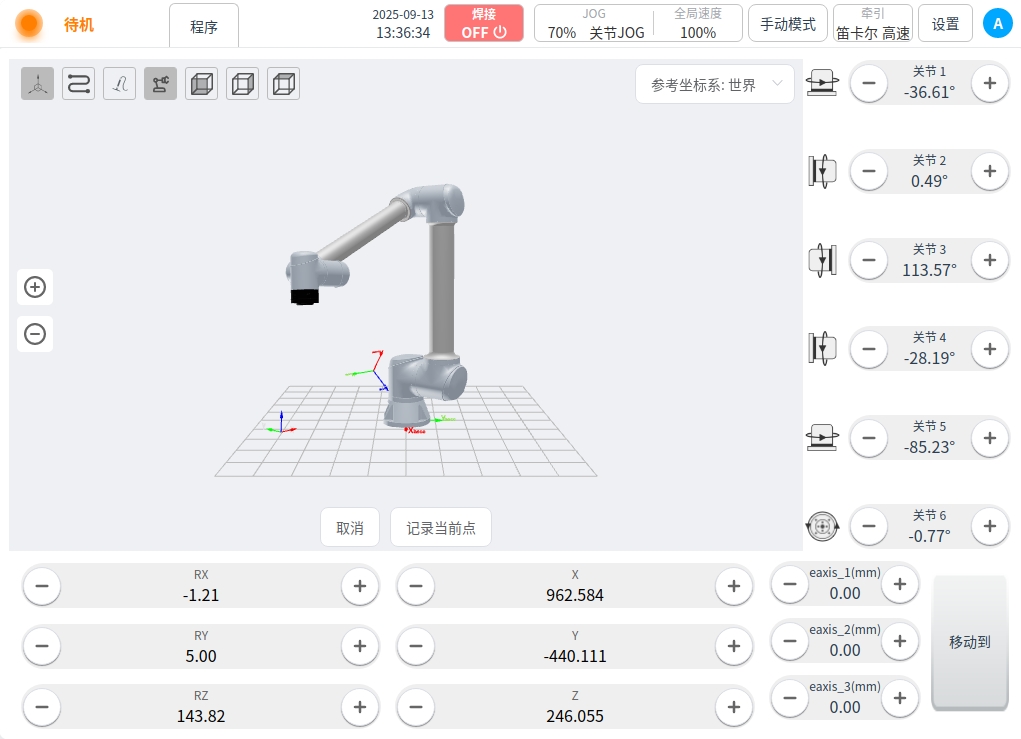
装箱设置,用户可通过单击装箱设置各个关节输入框,手动输入关节角度,也可通过单击“示教点”按钮,跳转到机器人控制界面进行示教设置, JOG机器人到目标点后,单击“记录当前点”,界面会跳回当前子界面,页面显示示教好后的关节角度值,如下图所示。 也可通过示教器物理按钮直接JOG机器人到目标点位后,直接单击页面“记录当前点”。若机器人不在装箱位置,长按“移动到此点” 按钮,可以让机器人运动到打包装箱位置。