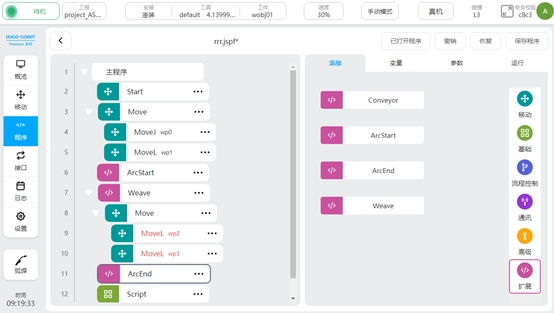
3D视觉免示教#
介绍#
3D视觉免示教通过相机视觉识别图像,获取焊缝的特征,识别焊缝自动生成焊接点位,并返回给机器人,实现免示教。
相机通讯连接#
相机通讯在系统配置中智能化3D视觉免示教页面进行配置连接。
编程功能块#
与3D视觉免示教相关的功能块有两个:SingleCapture,MultiCapture。
SingleCapture#
单步拍照,返回焊接的焊缝信息。

拍照参数
视觉模版号: 选择相应相机系统中的模版号填写;
相机RIO号: 在相机系统中创建识别区域以及创建RIO号后,进行填写相应的RIO号;
- 视觉输出首条焊缝关联: 用存储相机返回的焊缝点位数据;首次使用需先创建系统变量,变量名称为’weld_seam’,类型’pose_list’,数量至少10;当视觉输出首条焊缝关联后,当前拍照块的首条焊缝将关联选择项,后续焊缝将按序号以此关联。
例如:当前拍照块共返回三条焊缝,首条焊缝关联为‘g_weld_seam_1’,则后续焊缝将按自动关联‘g_weld_seam_2’和‘g_weld_seam_3’。

视觉输出焊缝信息关联: 用存储相机返回的焊缝信息数据;首次使用需先创建系统变量,变量名称为’weld_seam_info’,类型’pose_list’,数量至少6;关联方式同上

视觉输出信息
显示视觉输出焊缝信息,包含焊缝序号、关联变量、焊缝点位数、焊缝特征、板厚、间隙;
MultiCapture#
融合拍照,通过多次拍照进行图像拼接融合,然后返回融合后焊缝信息。
拍照参数
参数同上述SingleCapture的拍照参数。重点在‘当前融合段位置’;
当前融合段位置: 选择当前融合块的位置;位置选择必须按照顺序进行选择;第一个融合块选择‘融合起始位’,中间按照融合中间位后序号顺序选择,最后一个融合块选择‘融合结束位’。

当融合块为‘融合结束位’时,可进行‘视觉输出首条焊缝关联’和‘视觉输出首条焊缝关联’的选择。

- 视觉输出信息
同上述。
编程教程#
SingleCapture#
单步拍照编程简单教程。
通过运动指令到达拍照点位置。
添加‘SingleCapture’功能块,并填写参数。例如下图:
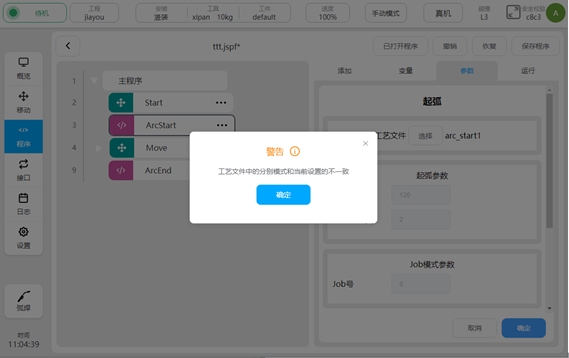
添加根据拍照的焊缝添加焊接运动指令相关块,运动指令的点位信息需要通过选择变量的形式填入。例如:返回一条焊缝,如下图:
Caution
正常情况下相机返回单条焊缝为四个点为:起始安全点,起弧点,收弧点,结束安全点。如需多个点位,需在相机系统重设置;
起始安全点(如拍照点位合适时,可忽略此点设置或自己设置为起始安全点)

焊接点位依次根据变量索引取值即可;
结束安全点(也可自行示教设置为结束安全点)

至此,完成单步拍照功能。
MultiCapture#
融合拍照程简单教程。
通过运动指令到达拍照点位置。
依次添加‘MultiCapture’功能块,并填写参数。例三次融合拍照,如下图:
融合起始点位

融合中间点1
融合结束位
后续焊接轨迹点关联参照单步拍照教程。
异常信号#
在出现拍照异常情况,外部想获取异常信号时,可创建系统变量‘captureError’,进行监听捕获。