安全功能介绍#
GCR系列机器人配备了各种内置安全功能,以及用于连接其他机器人和附加保护装置的紧急电气接口的安全I/O、数字和模拟控制信号。根据ISO 13849-1:2023第3.1.43节,所有安全功能均为高需求模式。
一旦触发其中一个安全功能,示教器上将会显示一个弹出窗口,并显示相应的错误代码。 错误代码的含义可参考《GCR系列协作机器人维护手册》
Caution
安全功能和接口的使用和配置必须遵循每个机器人应用的风险评估程序。
如果机器人检测到安全系统中的故障或违规(例如,紧急停止电路中的线路被切断或发生违反安全限制的情况),将启动0级停止。
停止时间应被视为应用程序风险评估的一部分。
Warning
使用与风险评估中确定的参数不同的安全配置参数可能会导致无法合理消除的危害或无法充分降低的风险。
确保TCP和夹具正确连接,以避免在电源中断的情况下发生危险。
末端执行器的功能不受GCR安全系统的保护。末端执行器的连接电缆不受监控。
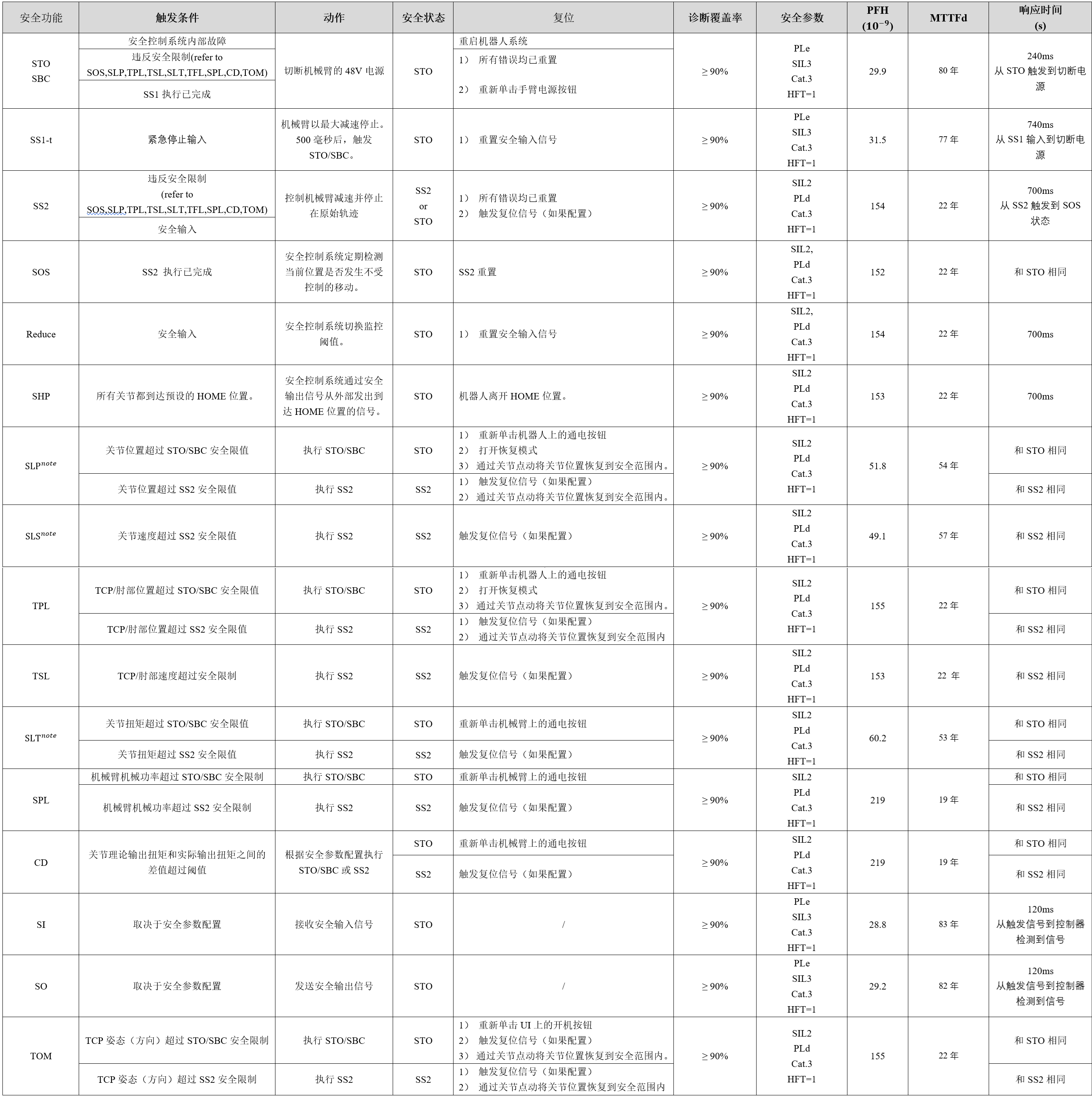
下表3‑1和表3‑2列出了GCR系列机器人的所有安全功能。机器人安全功能用于降低风险评估确定的机器人系统的风险。
安全功能 |
功能名称 |
描述 |
|---|---|---|
STO/SBC |
安全扭矩关闭/安全制动控制 |
此功能同时执行安全扭矩关闭和安全制动控制。立即切断机械臂的电源。机器人将立即停止。运动将偏离预期的轨迹。 |
SS1-t (STOP1) Emergency Stop |
安全停止类别1 |
此功能执行安全停止类别1。机器人将以最大减速停止。运动将偏离预期但由关节控制的轨迹。延时500ms,切断机械臂电源。 |
SS2-t (STOP2) |
安全停止类别2 |
此功能执行安全停止类别2。机器人将以设定的减速停止。运动将遵循预期的轨迹。 |
SOS |
安全运行停止 |
此功能用于监测安全停止类别2后的意外运动。一旦机器人SS2功能执行完毕,SOS功能将被激活。如果其中一个关节移动超过3度,STO将被触发。 |
Reduce |
缩减模式切换 |
一旦触发相关的安全输入,机器人就会切换到缩减模式,然后所有安全参数阈值都会变为缩减模式值。 |
SHP |
安全Home 位置 |
如果所有关节都到达定义的起始位置,将触发相关的安全输出。 |
SLP |
安全位置限制 |
监测关节位置,一旦关节位置超过安全限值,将触发相关的安全停止。 |
SLS |
安全速度限制 |
监控关节速度,一旦关节速度超过安全限制,将触发相关的安全停止。 |
TPL |
TCP/肘部位置限制 |
监控TCP和肘部空间位置,一旦TCP/肘部位置超过安全限制,将触发相关的安全停止。 |
TSL |
TCP/肘部速度限制 |
监控TCP和肘部速度,一旦TCP/肘部速度超过安全限制,将触发相关的安全停止。 |
SLT |
安全扭矩限制 |
监测关节扭矩,一旦关节扭矩超过安全限值,将触发相关的安全停止。 |
TFL |
TCP/肘部力限制 |
监控TCP和肘部空间力,一旦TCP/肘部超过安全限值,将触发相关的安全停止。 |
SPL |
安全功率限制 |
监控机器人的机械功率。机械功率是所有关节机械功率的总和。关节机械功率是关节扭矩和关节速度的乘积。一旦机器人机械功率超过安全极限,将触发相关的安全停止。 |
CD |
碰撞检测 |
监测理论和实际关节扭矩之间的差异。一旦差值超过安全限值,将触发相关的安全停止。 |
SI |
安全输入 |
接收到安全输入信号。 |
SO |
安全输出 |
输出安全输出信号。 |
TOM |
TCP姿态限制 |
监控TCP的“Rz”轴与参考方向之间的角度。一旦角度超过安全限制,将触发相关的安全停止。 |
所有安全功能的测试间隔均为系统启动后每隔10ms触发一次。
表3‑2安全功能详细信息