


安全停止#
安全停止执行逻辑#
根据具体情况,机器人可以启动根据IEC60204-1定义的三种类型的停止时间。 这些类别定义见下表3-4。
表3‑4 安全停止执行逻辑
Warning
为确保SS2功能保持有效,如果机器人处于SS2状态超过24小时,用户应移动机器人一次。
触发条件 |
安全输入配置 |
复位条件 |
|---|---|---|
预留保护性停止输入已激活 |
无复位信号输入 |
保护性停止输入未激活 |
保护性停止复位信号输入 |
下列两者都须满足: 1. 保护性停止输入未激活; 2. 保持保护性停止复位输入有效0.5s~10s。 |
|
自动模式保护性停止输入已激活 |
无复位信号输入 |
自动模式保护性停止输入未激活。 |
保护性停止复位信号输入 |
下列两者都须满足: 1. 自动模式保护性停止输入未激活; 2. 保持保护性停止复位输入有效0.5s~10s。 |
|
自动模式保护性停止复位信号输入 |
下列三者都须满足: 1. 自动模式保护性停止输入未激活; 2. 保持保护性停止复位输入有效0.5s~10s; 3. 机器人处于自动模式 |
|
诊断功能或其 他安全功能已激活 |
无复位信号输入 |
故障已排除 |
保护性停止复位信号输入 |
下列两者都须满足: 1. 故障已排除; 2. 保持保护性停止复位输入有效0.5s~10s。 |
|
如果安全功能碰撞检测的反应被配置为SS2, 并且检测到碰撞 |
无影响 |
如果满足以下两个条件,则认为故障原因已消除,SS2重置。 1. 碰撞扭矩低于0.5N; 2. 机器人处于静止状态。 |
手动模式下,三位使能不在正确位置 |
无复位信号输入 |
三位使能处于正确位置 |
保护性停止复位信号输入 |
|
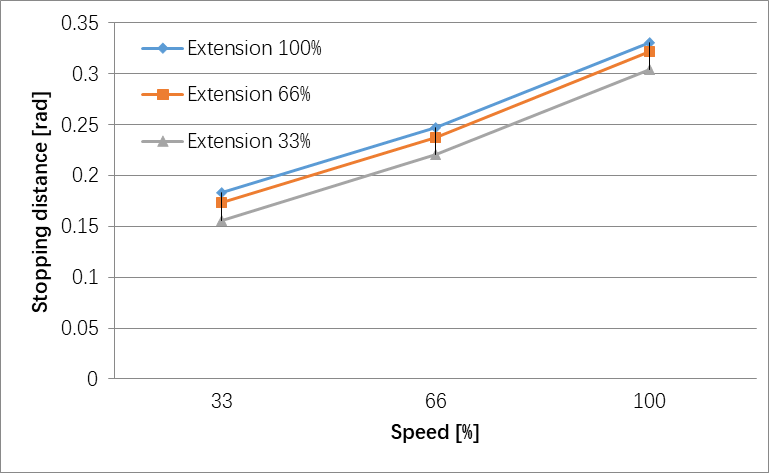
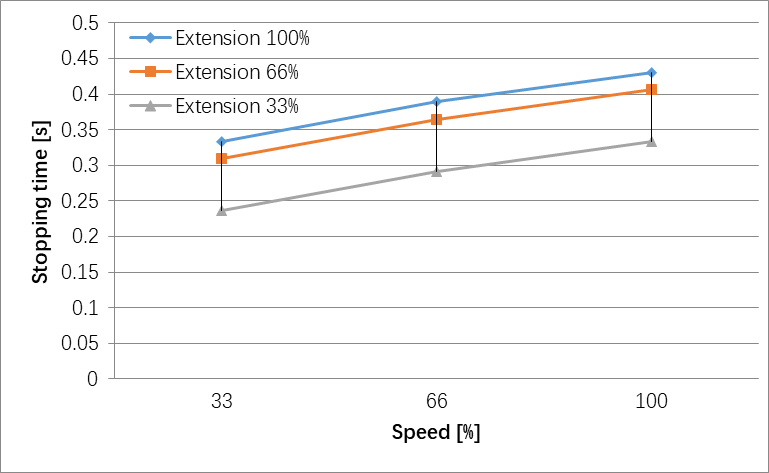
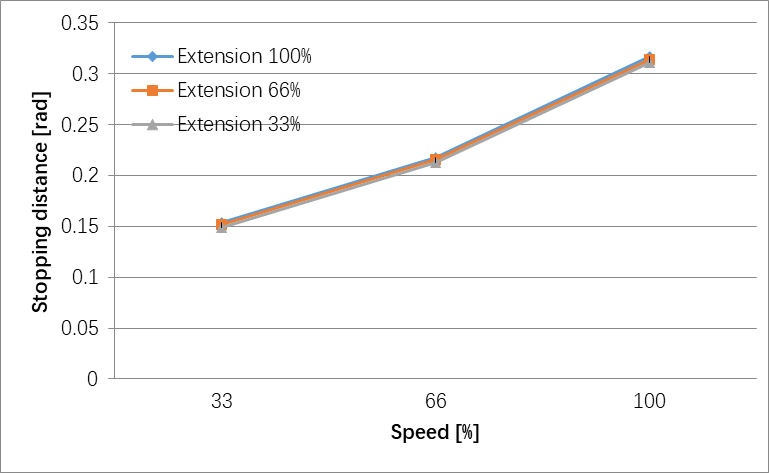
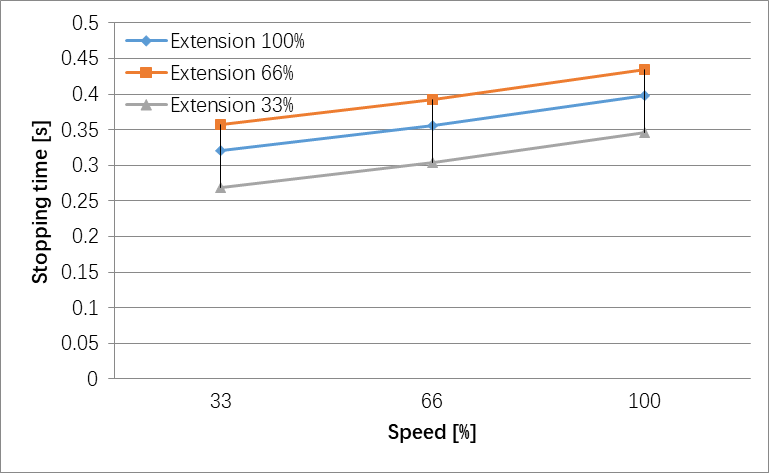
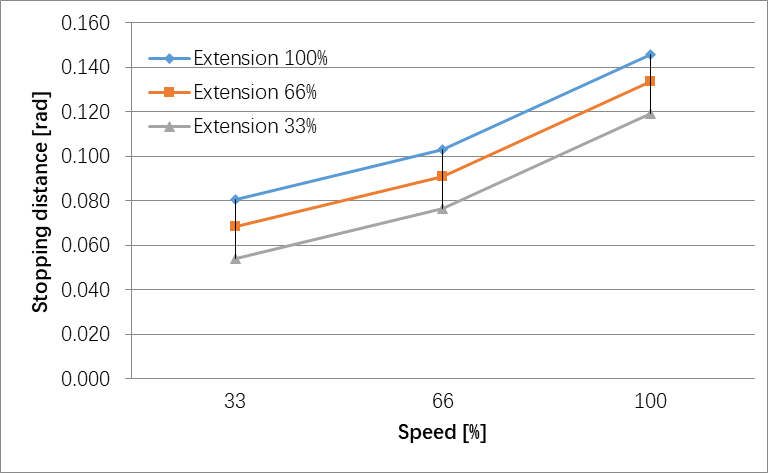
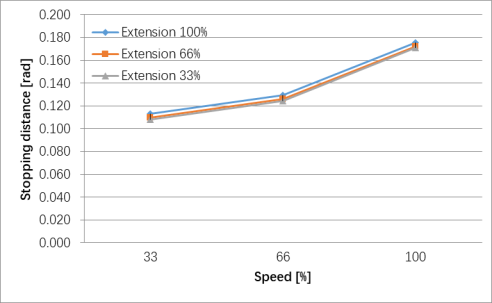
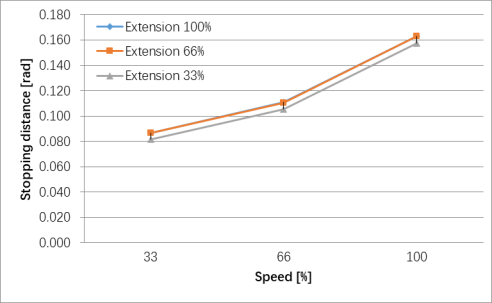
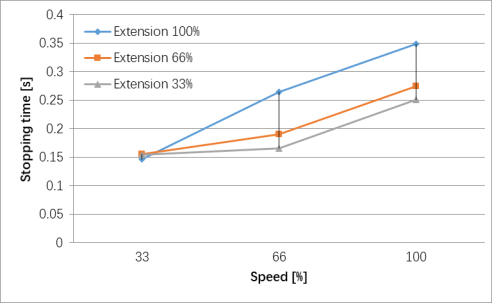
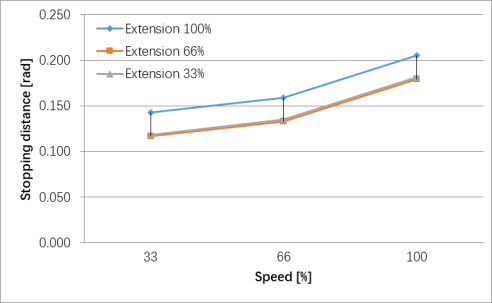
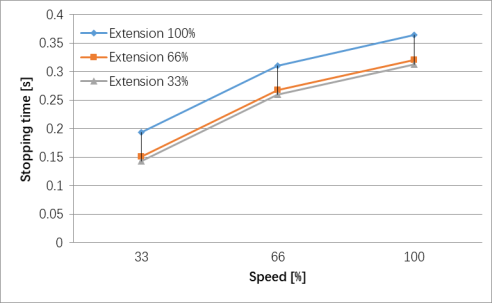
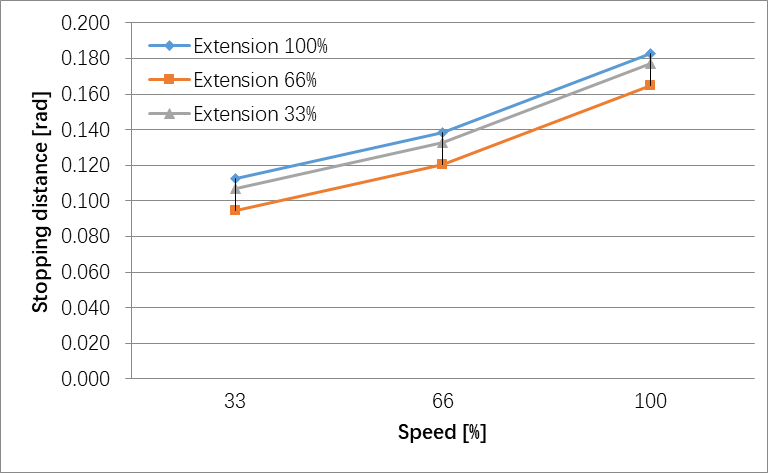
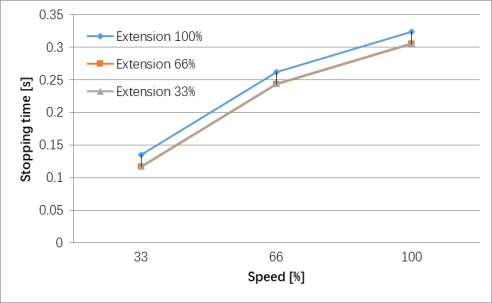
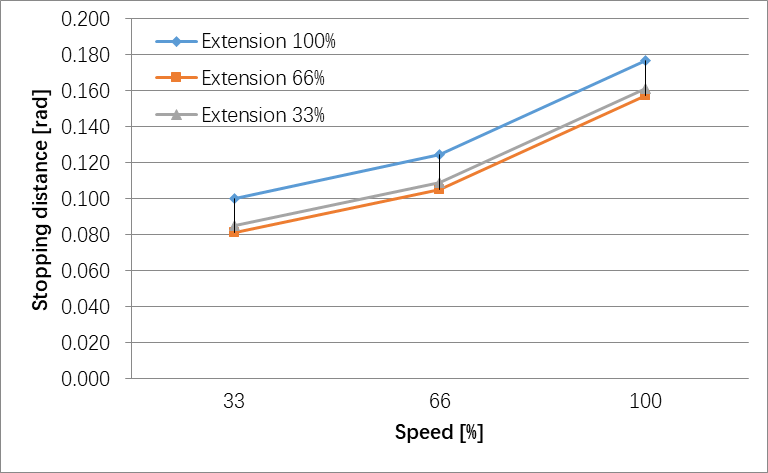
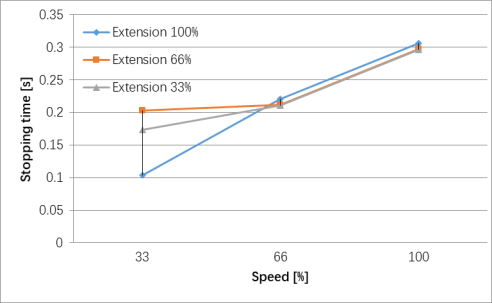
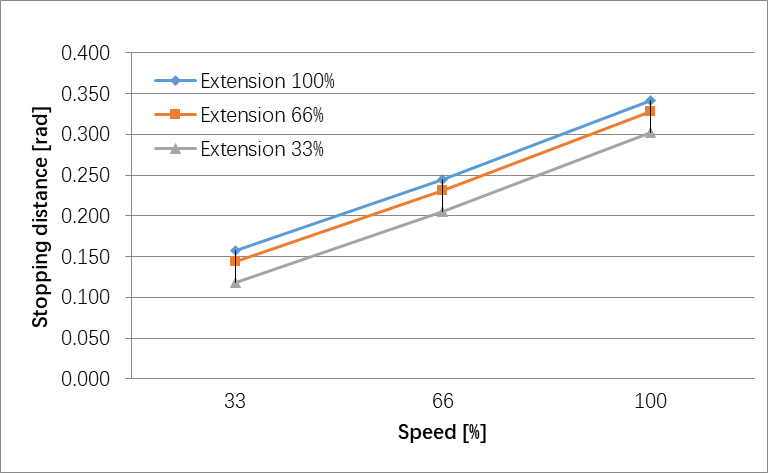
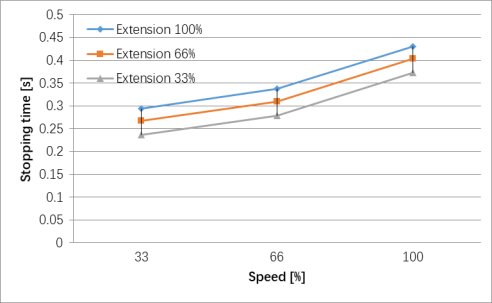
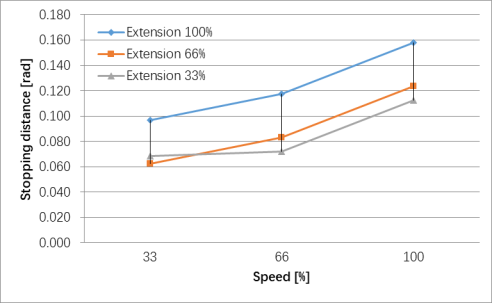
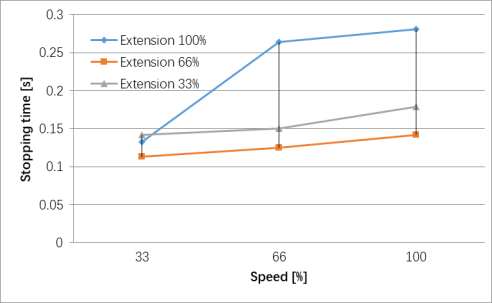
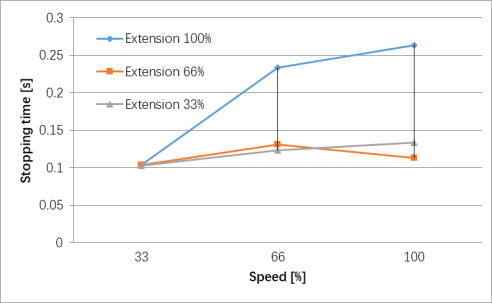
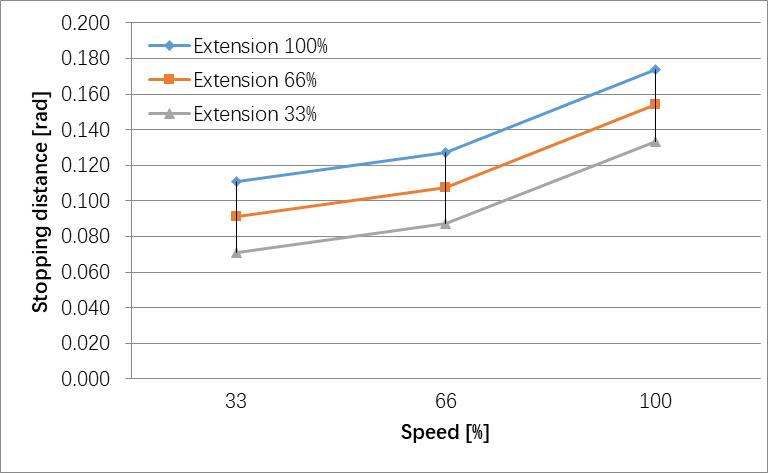
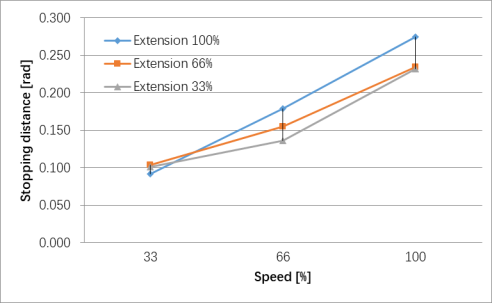
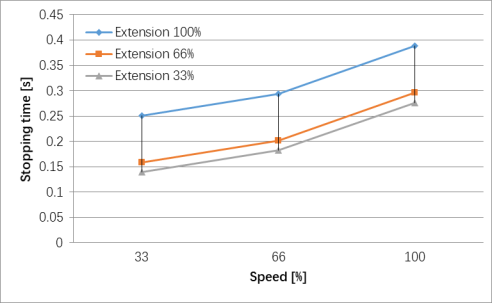
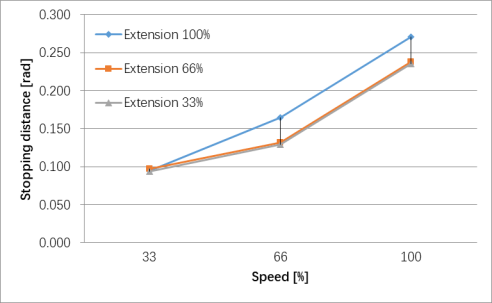
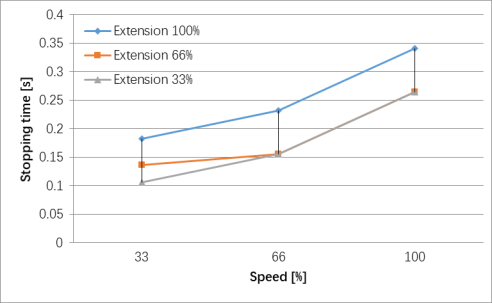
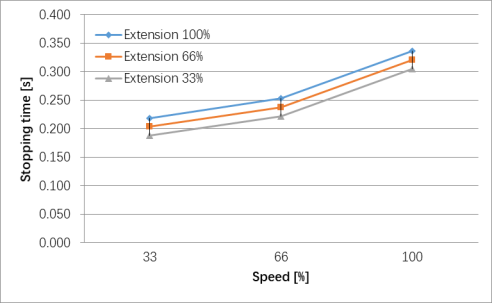
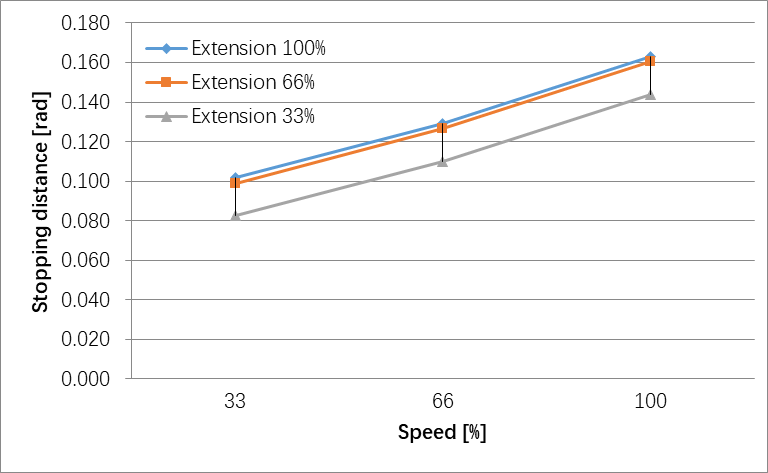
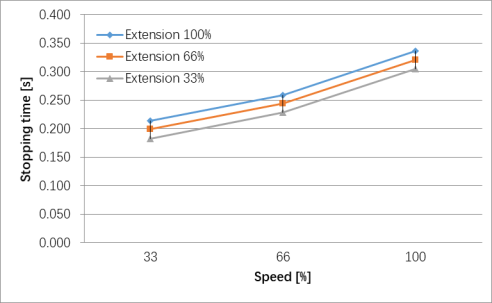
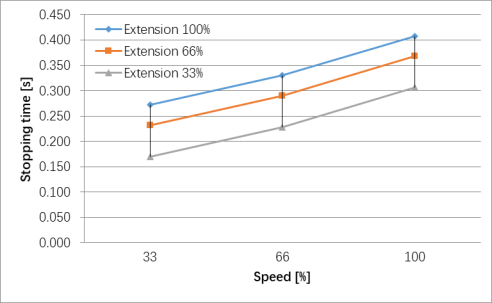
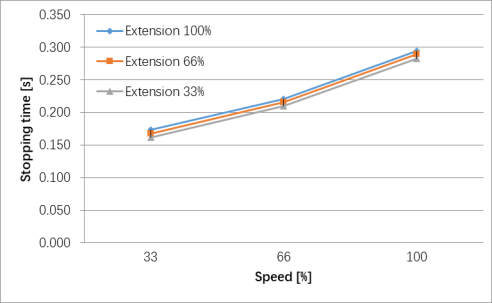
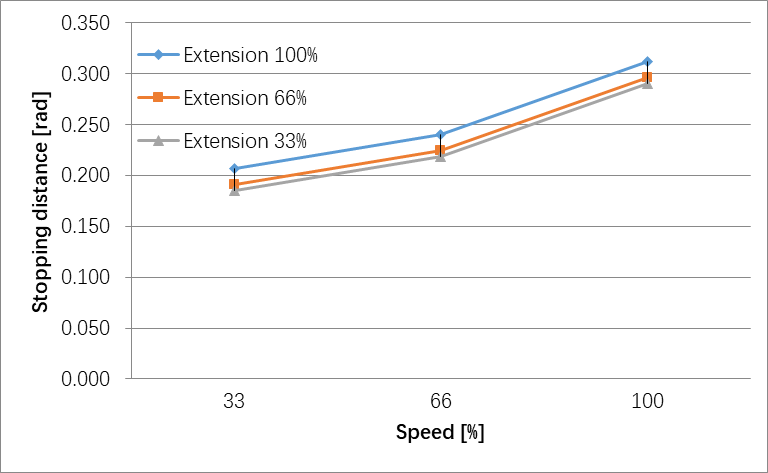
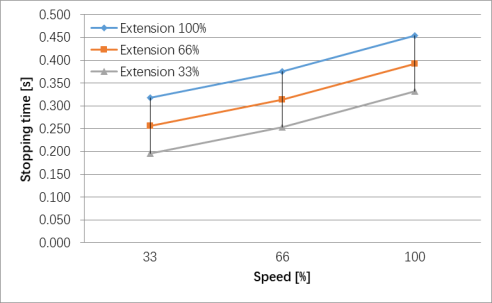
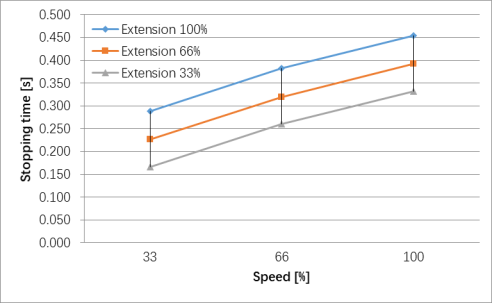
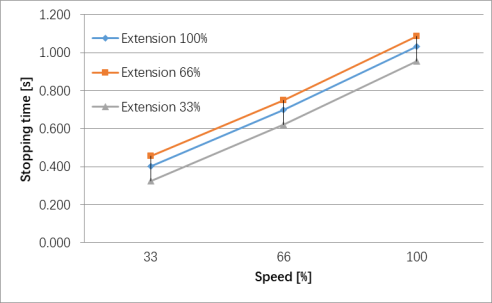
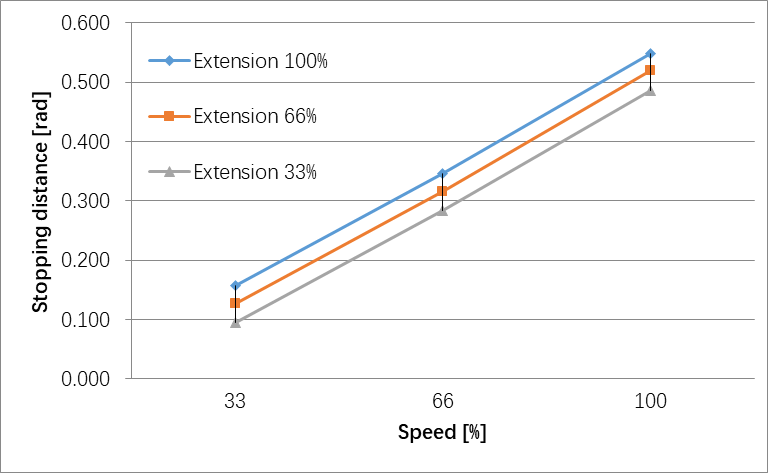
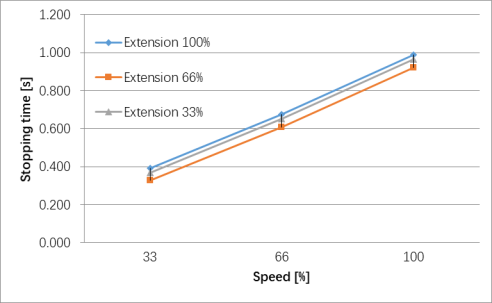
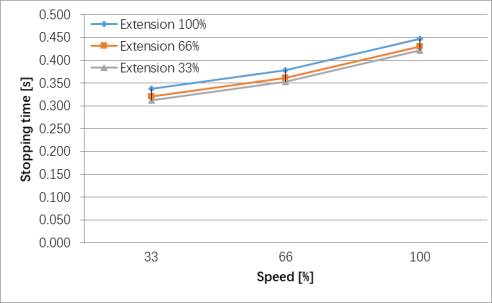
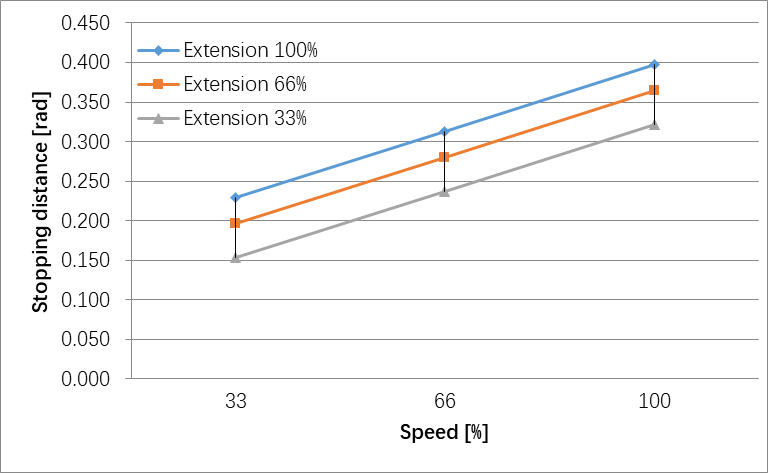
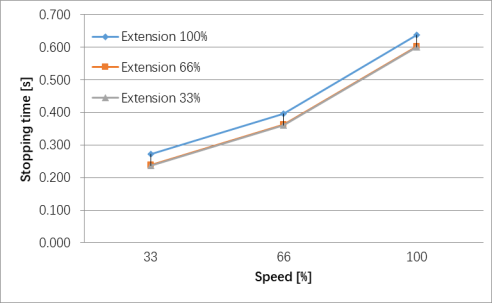
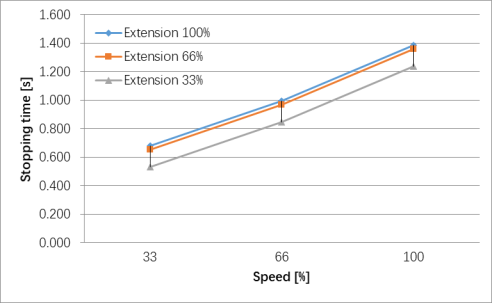
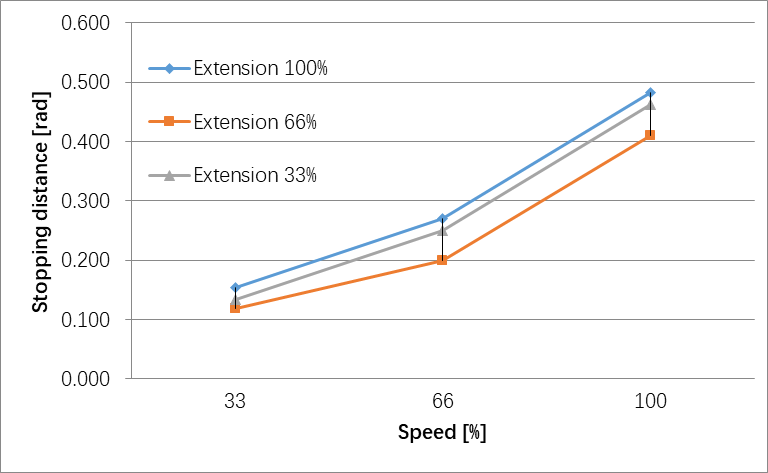
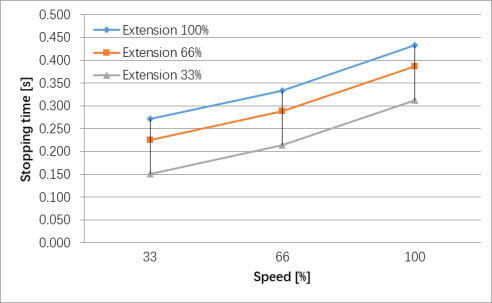
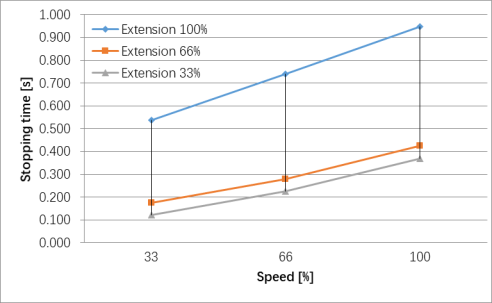
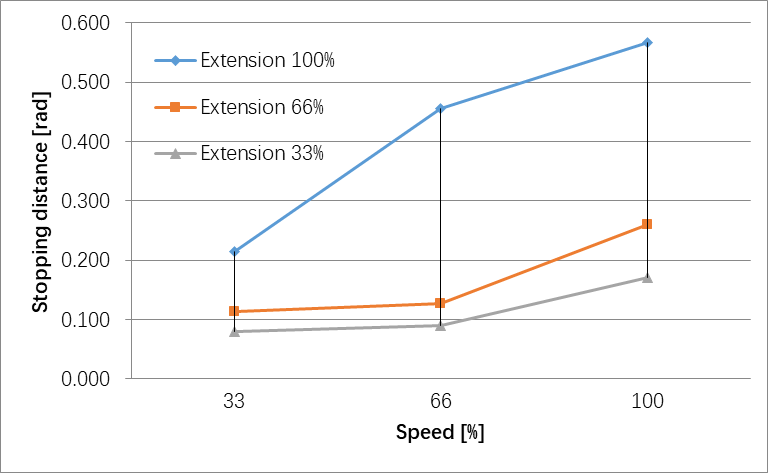
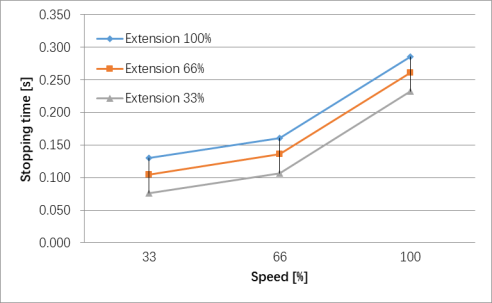
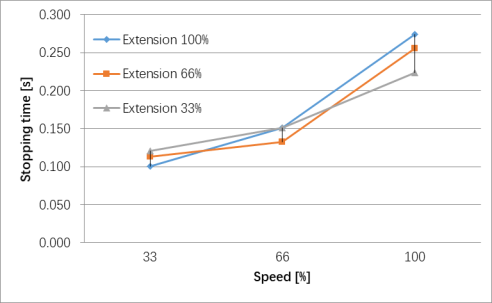
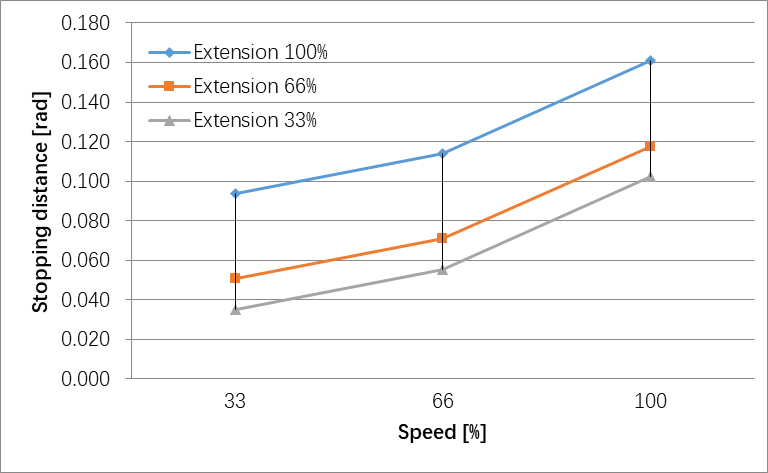
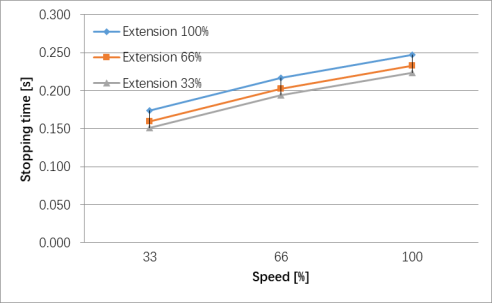
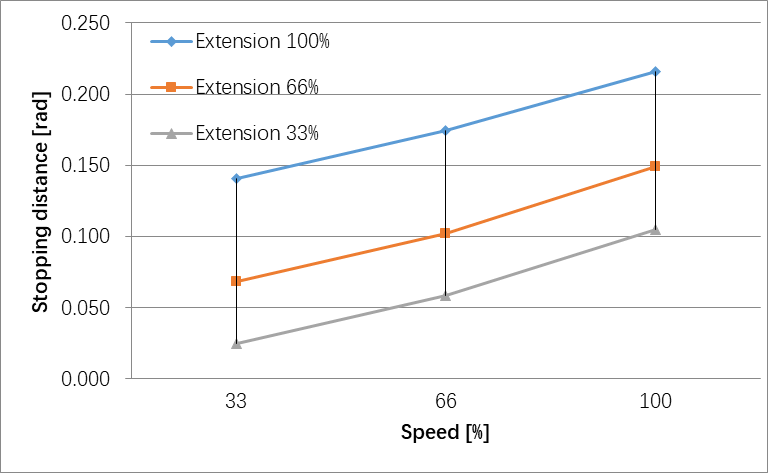
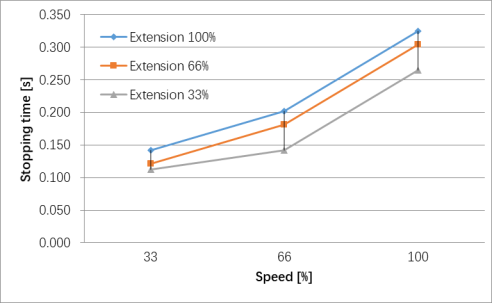
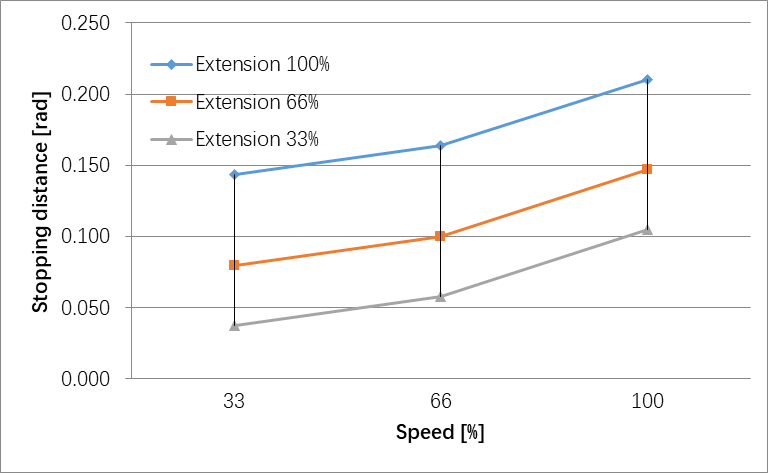
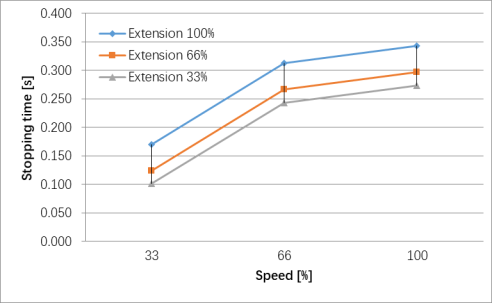
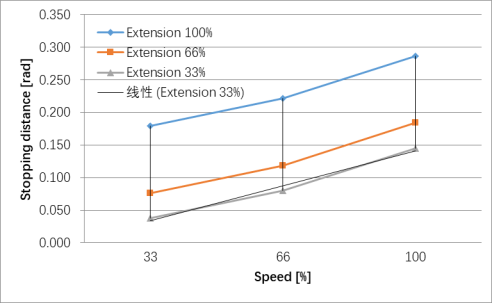
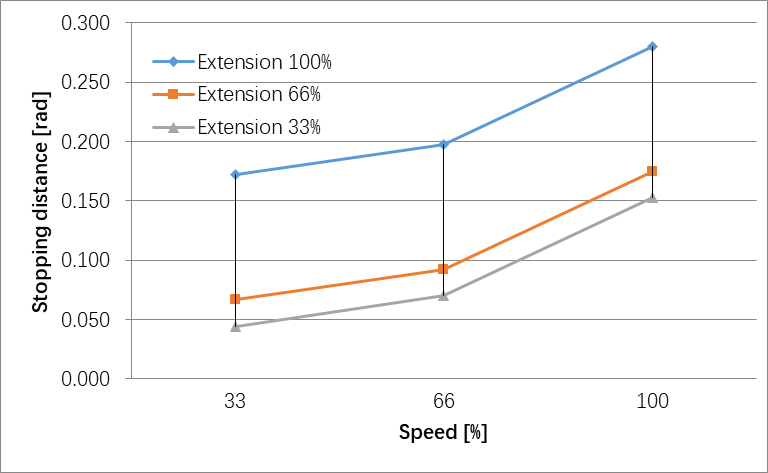
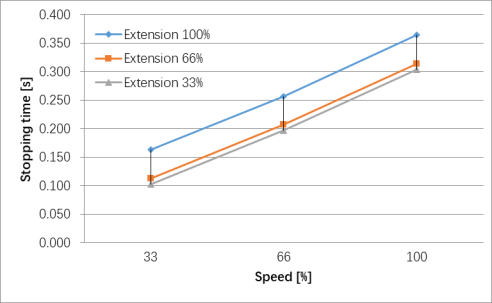
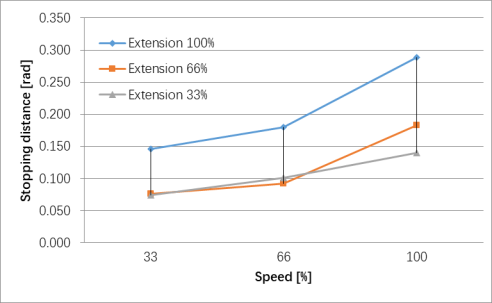
停止时间和距离#
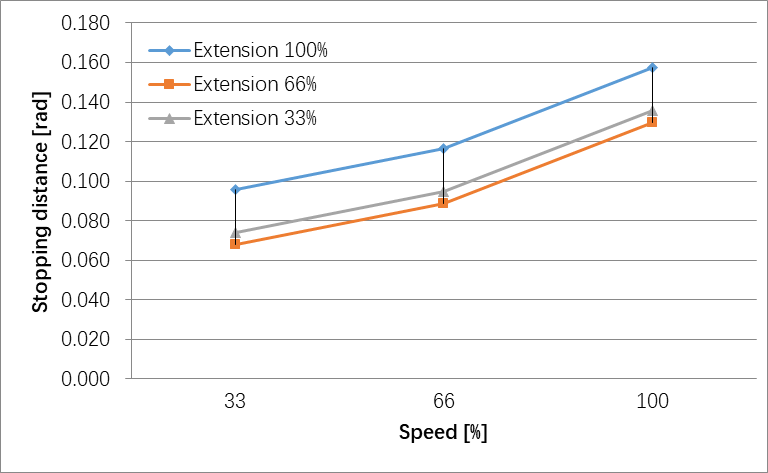
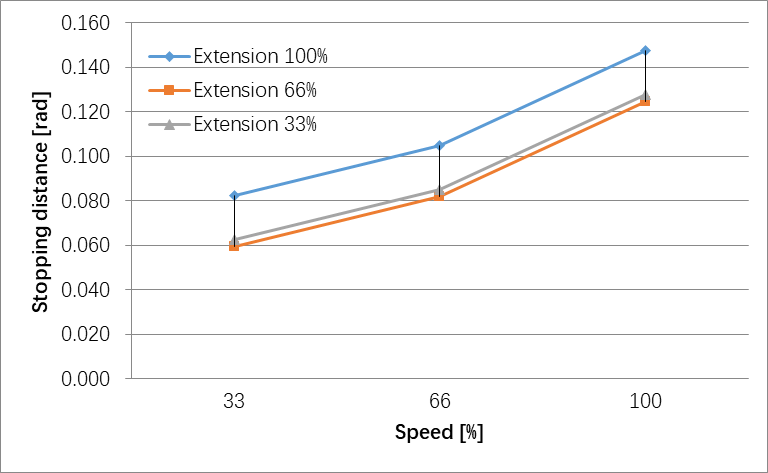
停止距离是从产生停止信号的时刻到所有关节停止工作的时刻所经过的角度。
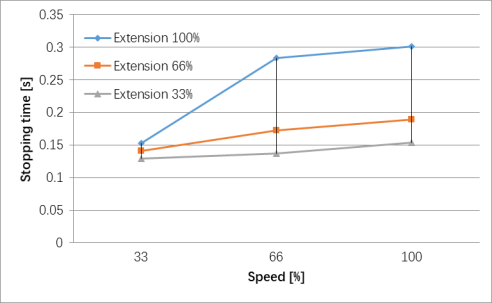
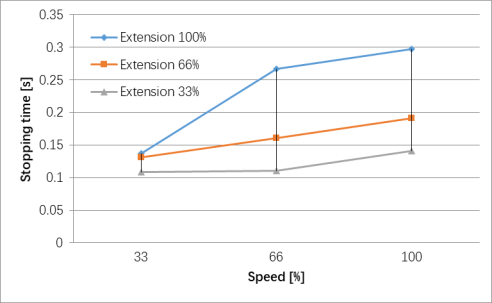
停止时间是从产生停止信号的时刻到所有关节停止工作的时刻的时间。
为行进较大距离的关节1、关节2和关节3提供停止距离和停止时间数据。
重叠轴的移动可能会导致更长的停止距离。
停止距离和停止时间数据根据ISO10218-1:2011附录B定义。
GCR5-910 and GCR7-910#
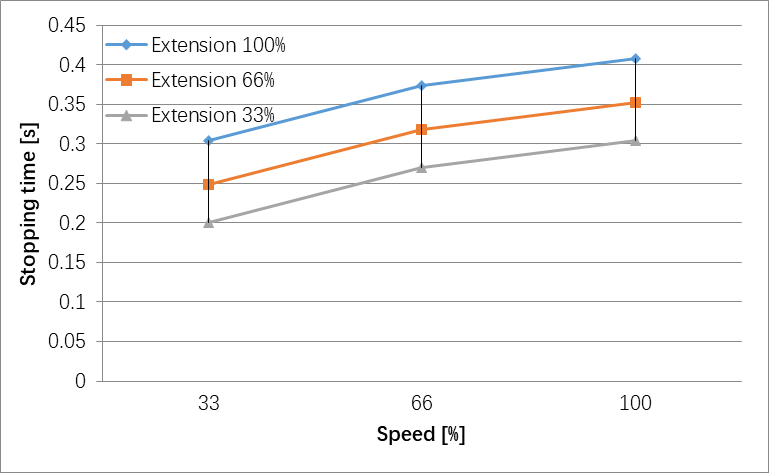
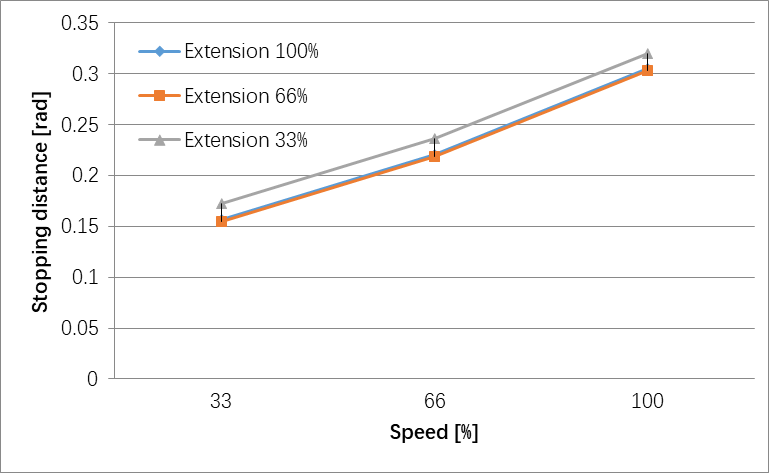
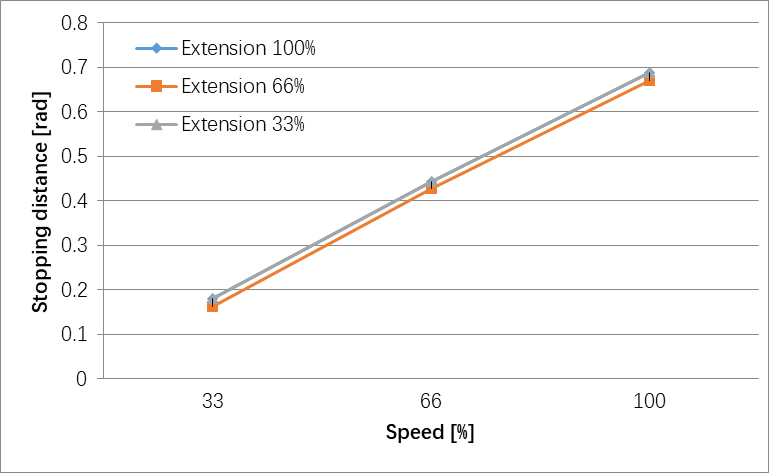
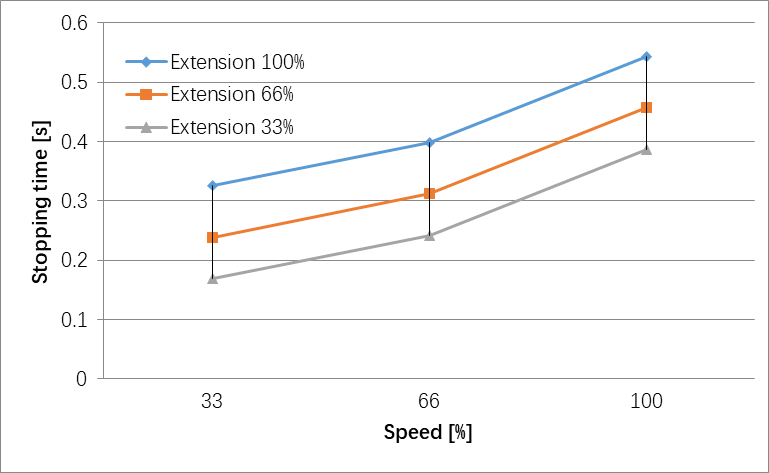
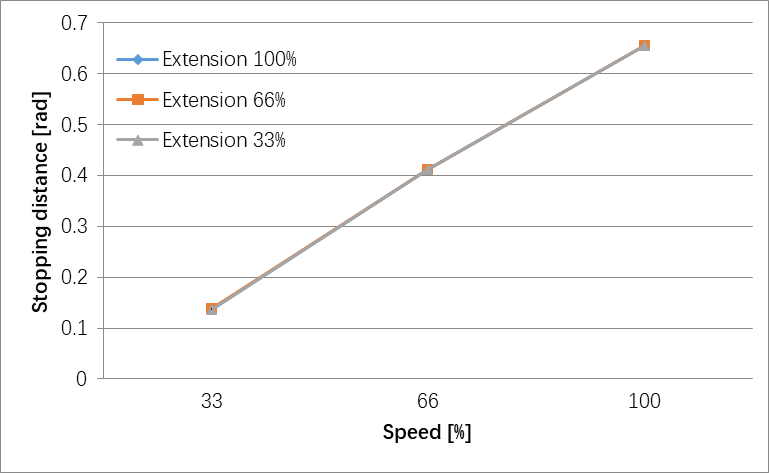
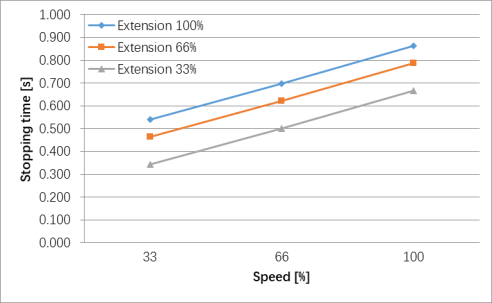
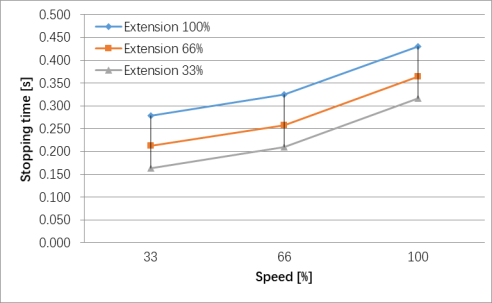
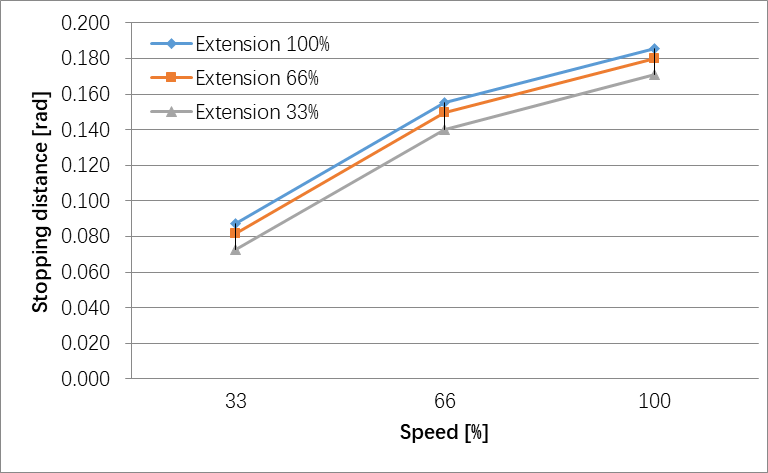
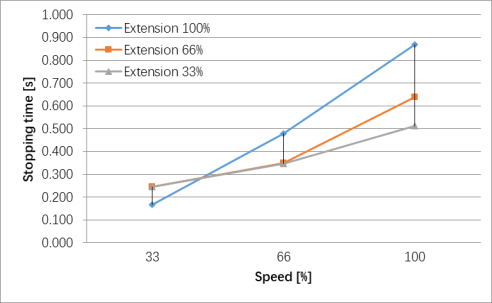
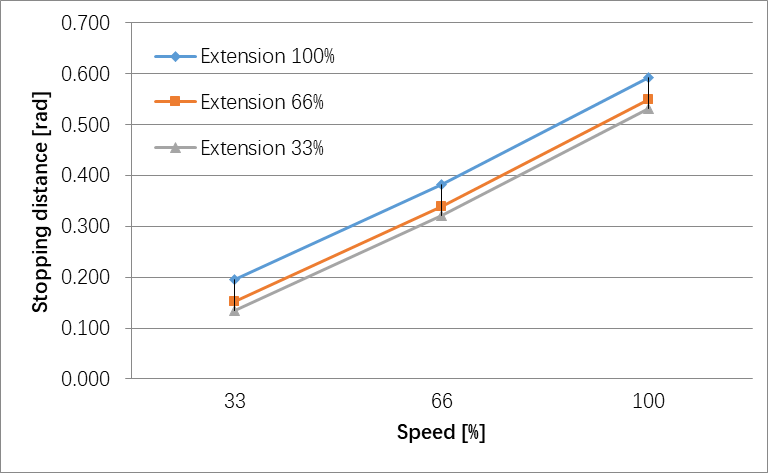
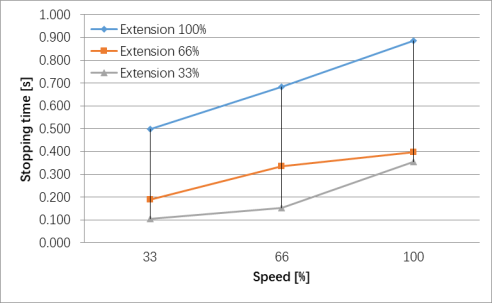
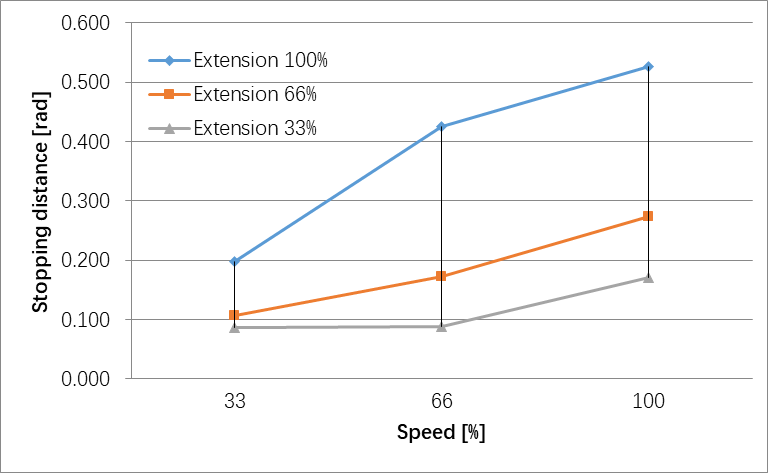
J1 Joint Stop Category 0:
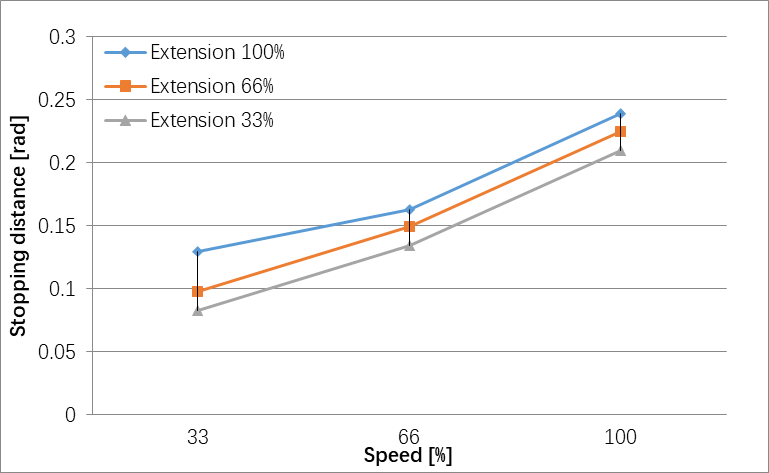
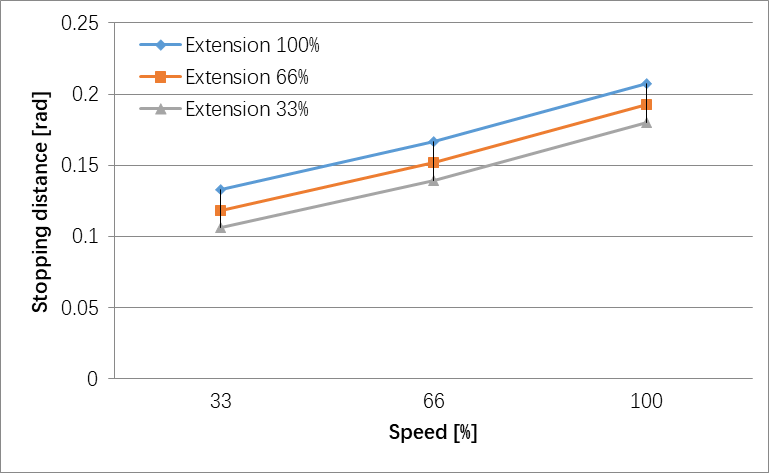
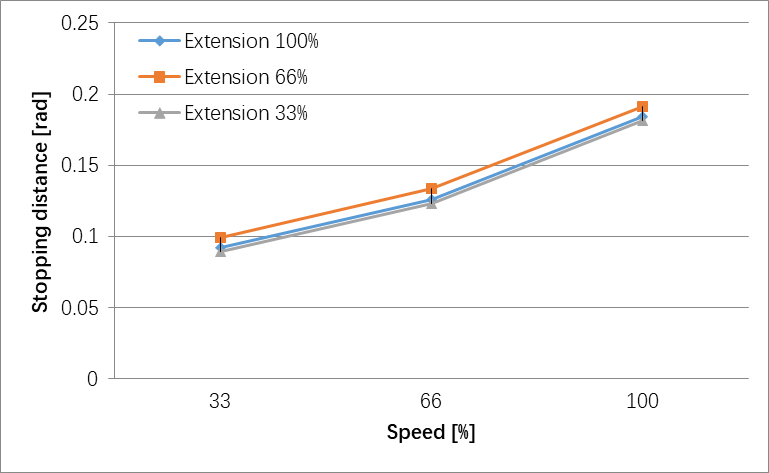
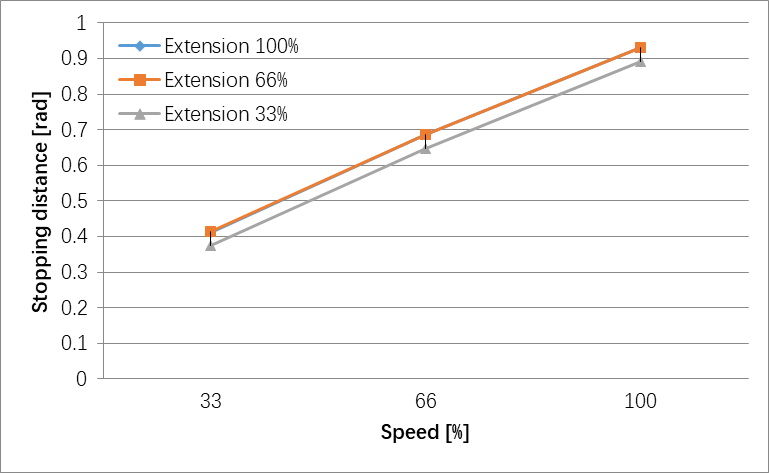
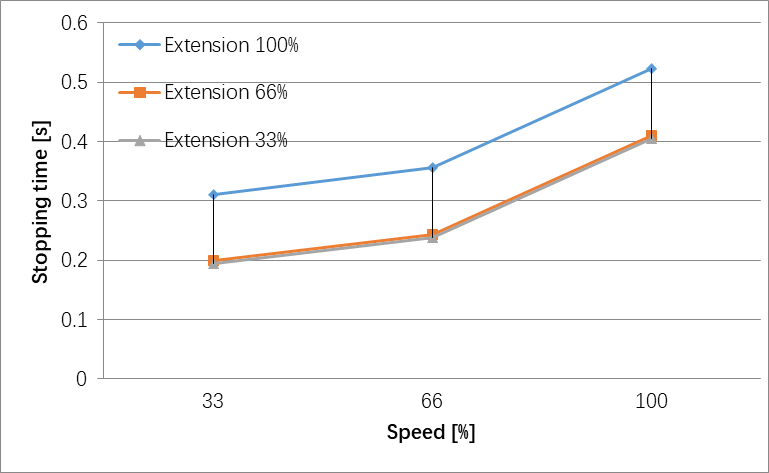
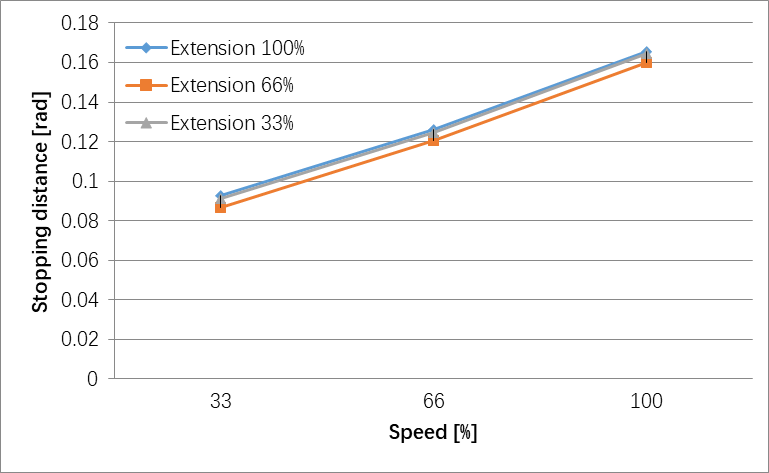
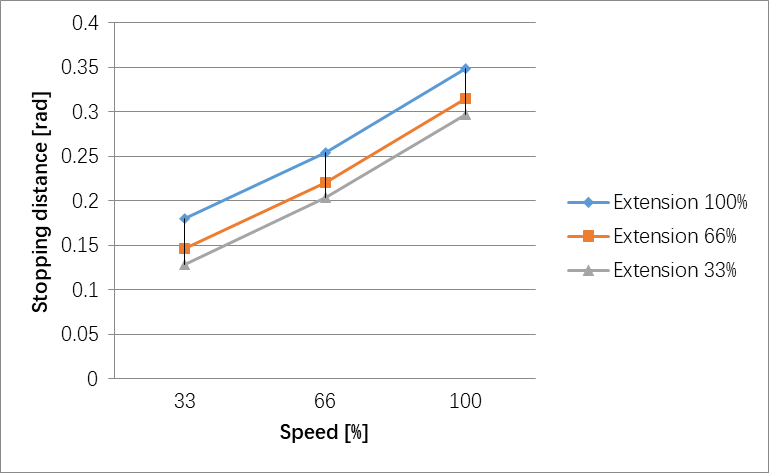
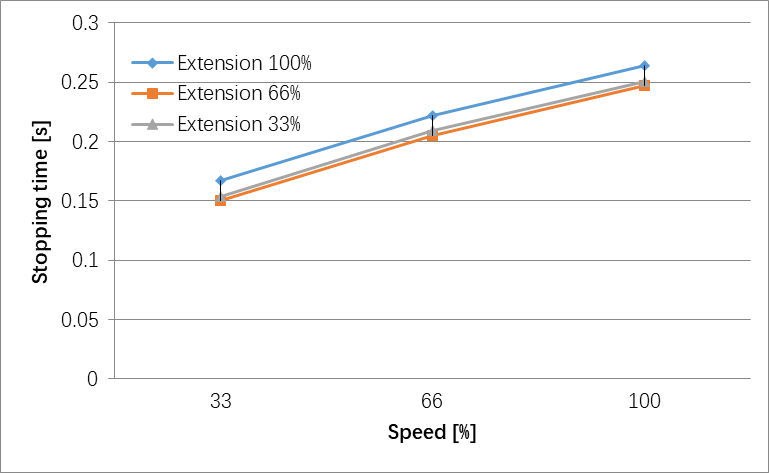
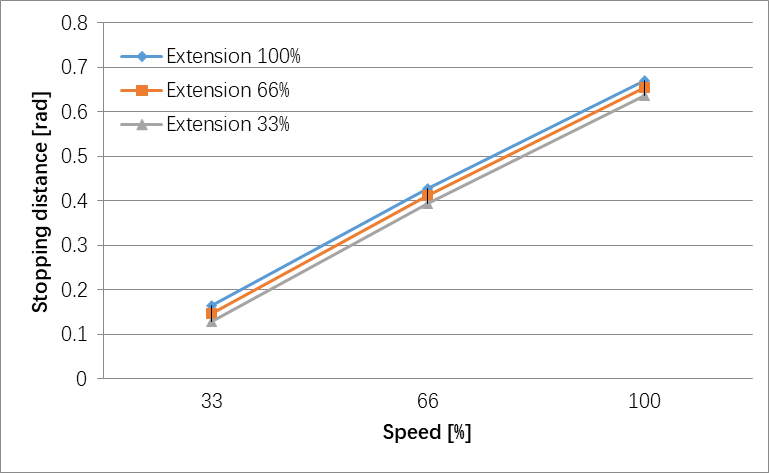
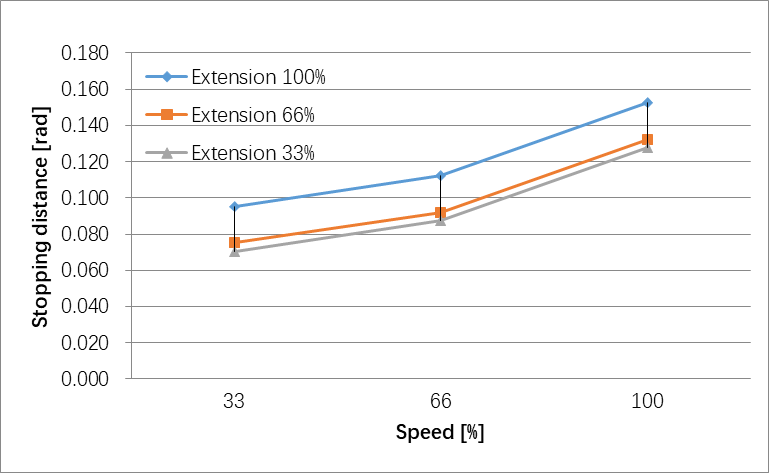
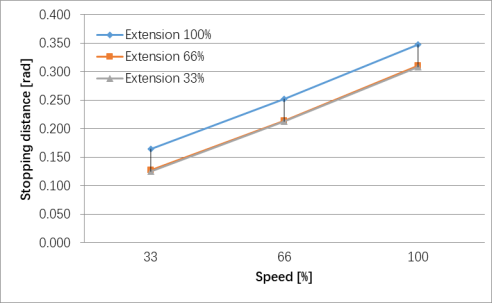
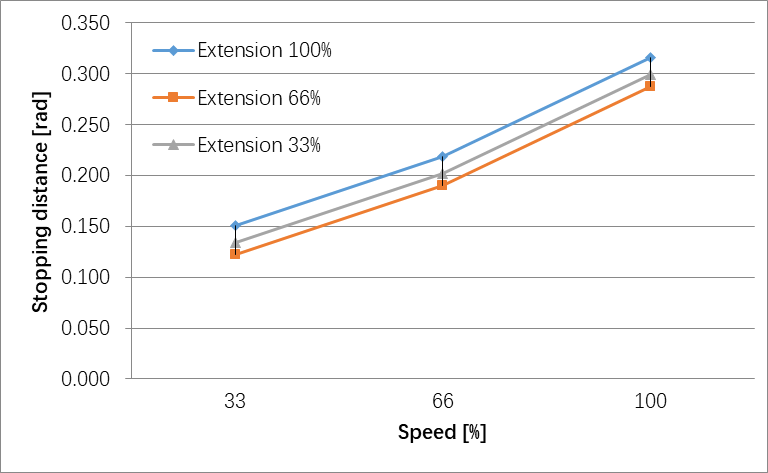
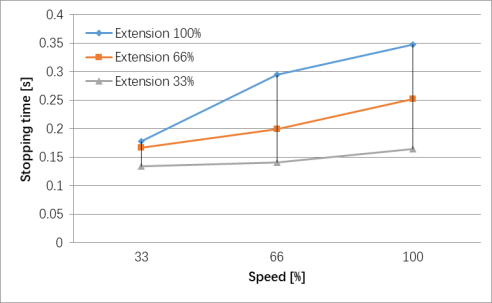
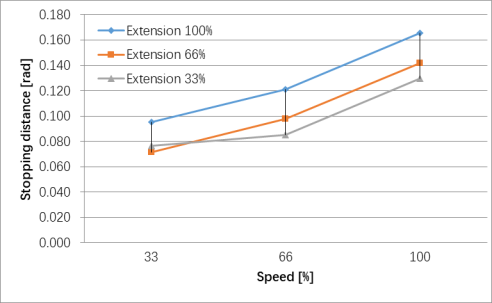
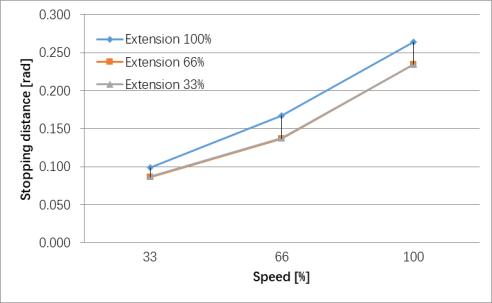
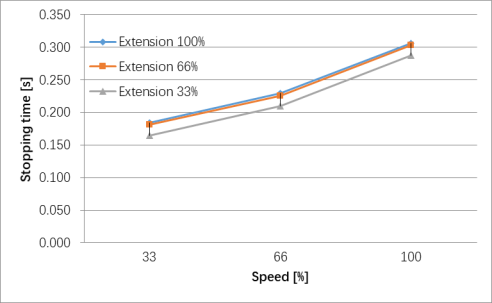
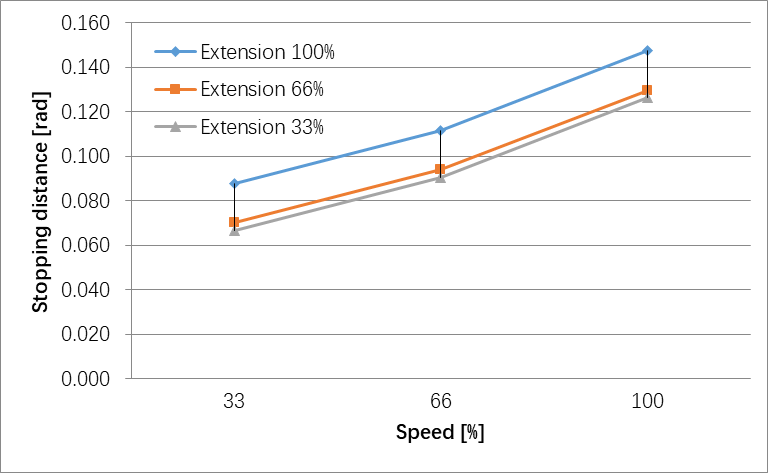
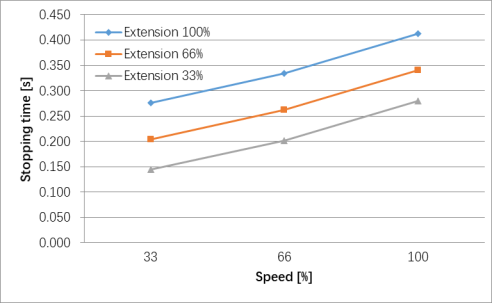
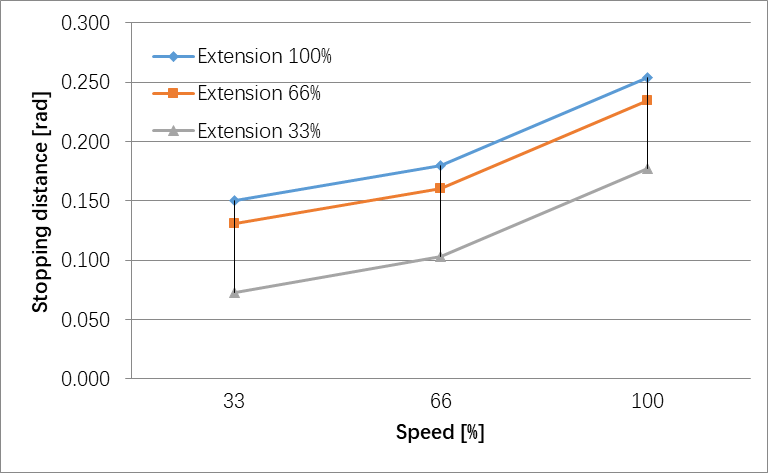
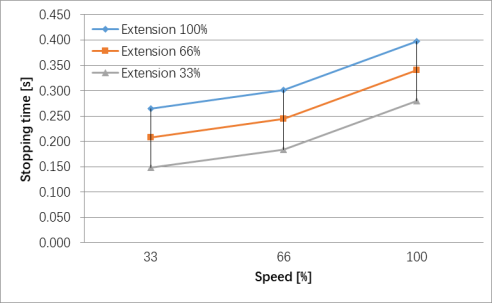
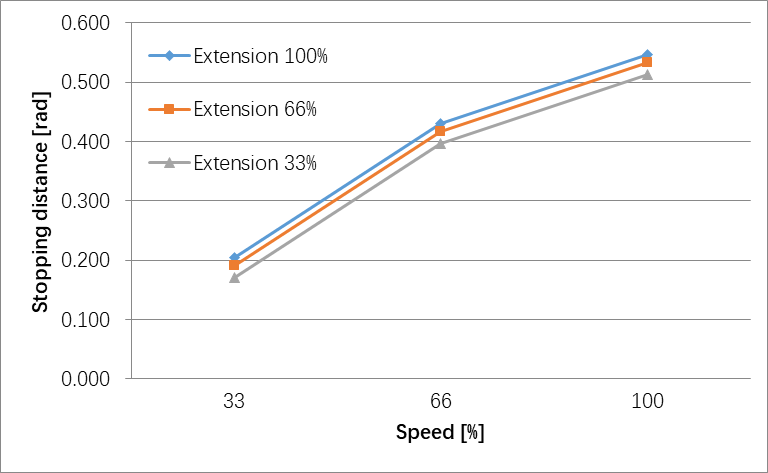
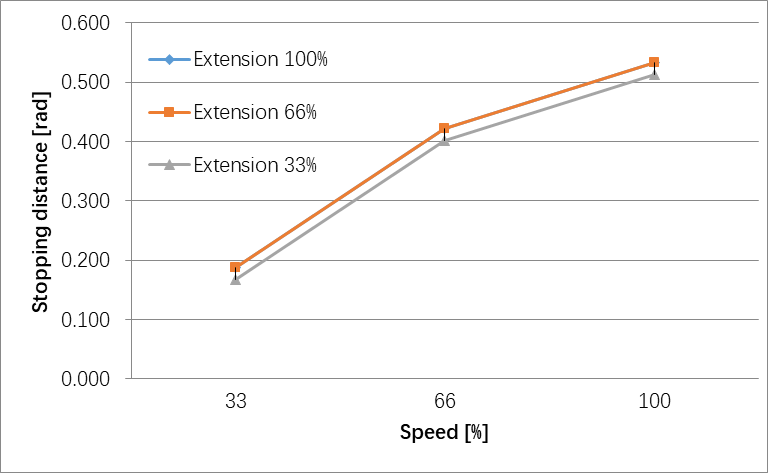
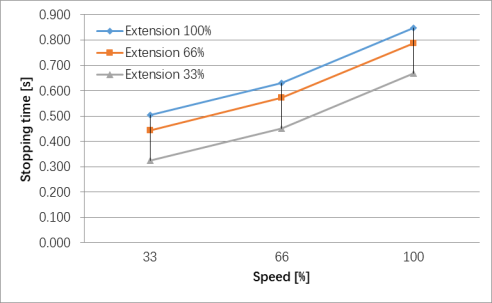
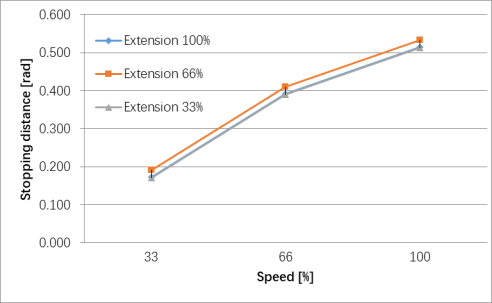
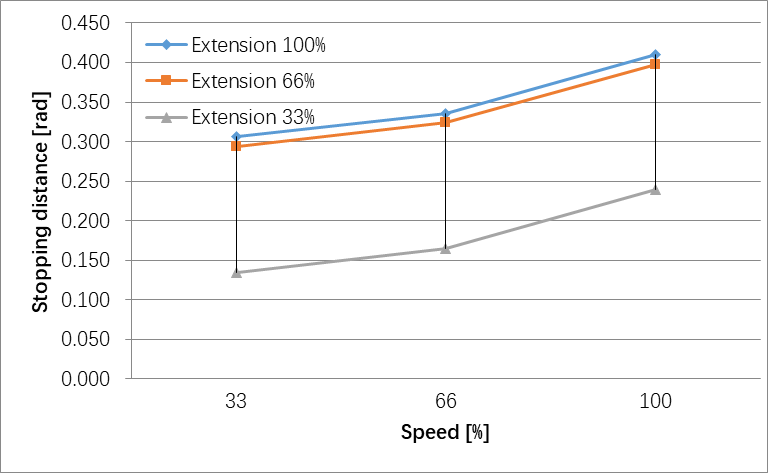
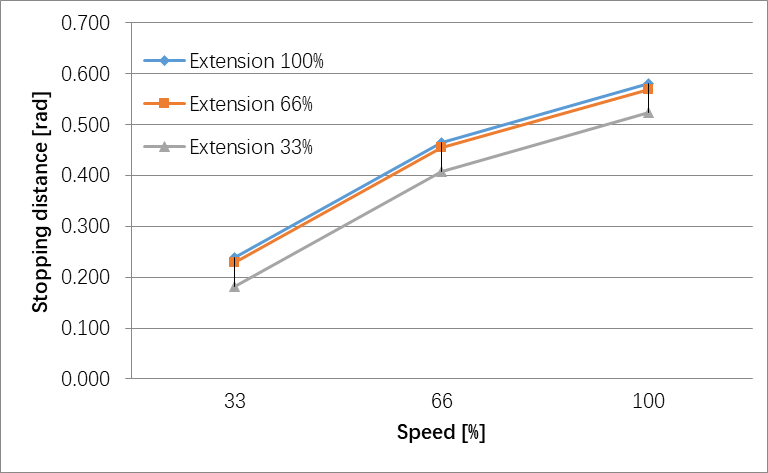
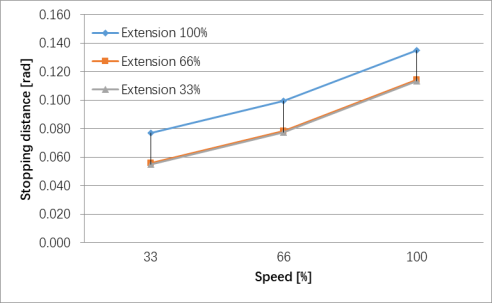
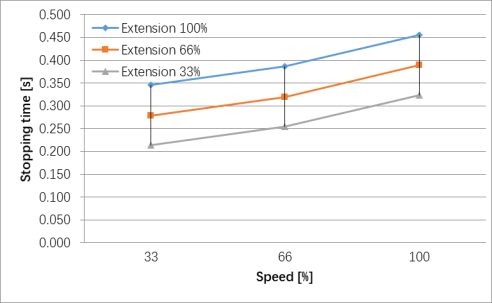
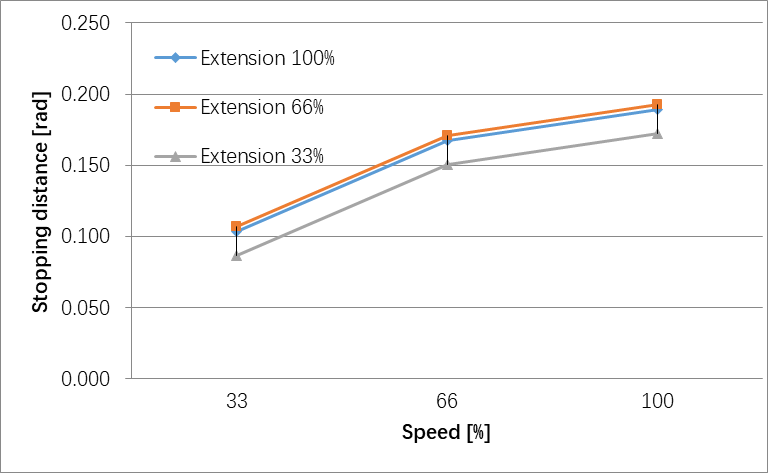
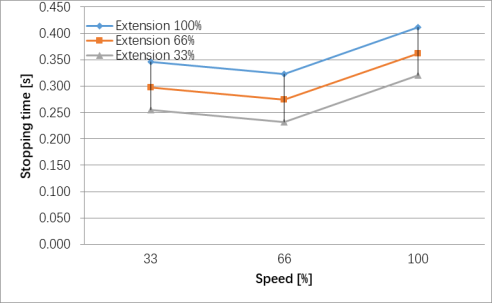
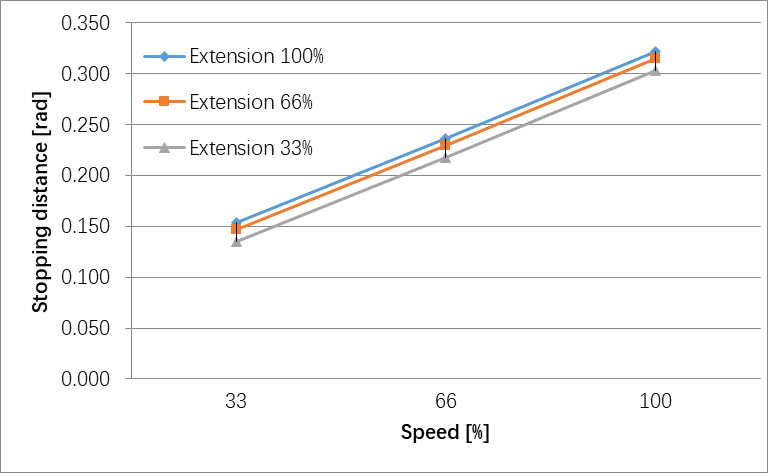
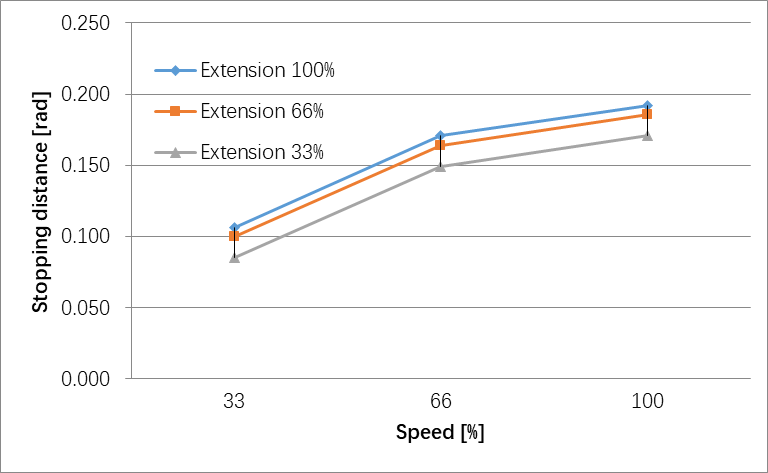
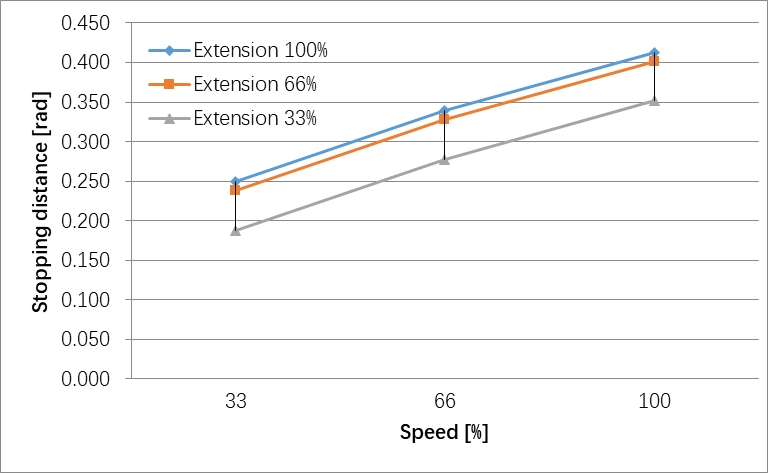
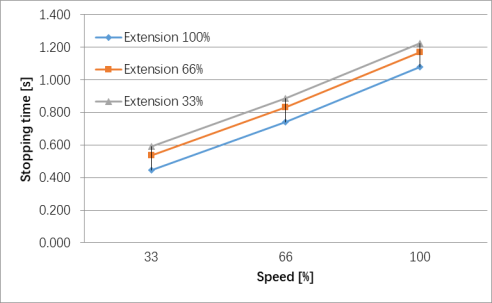
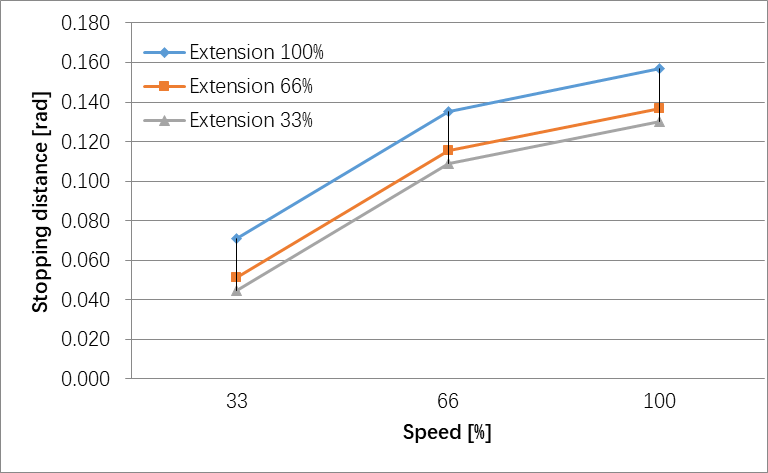
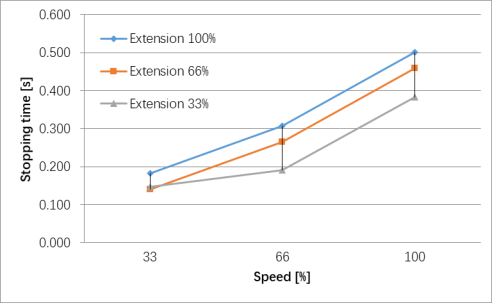
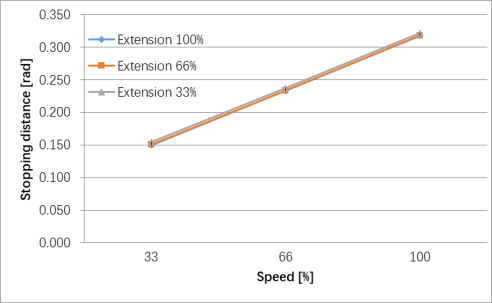
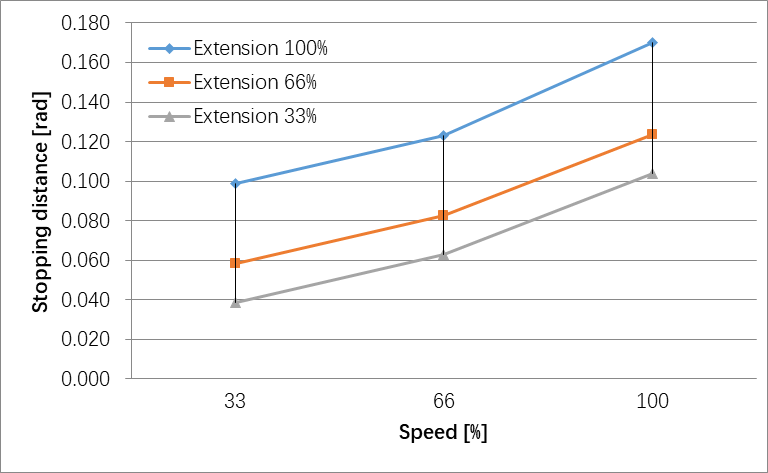
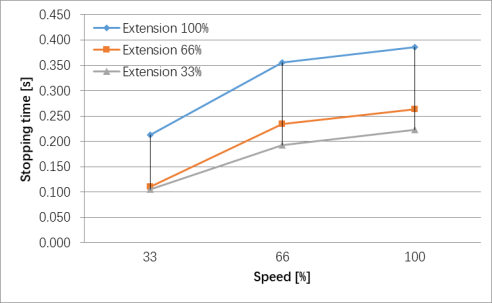
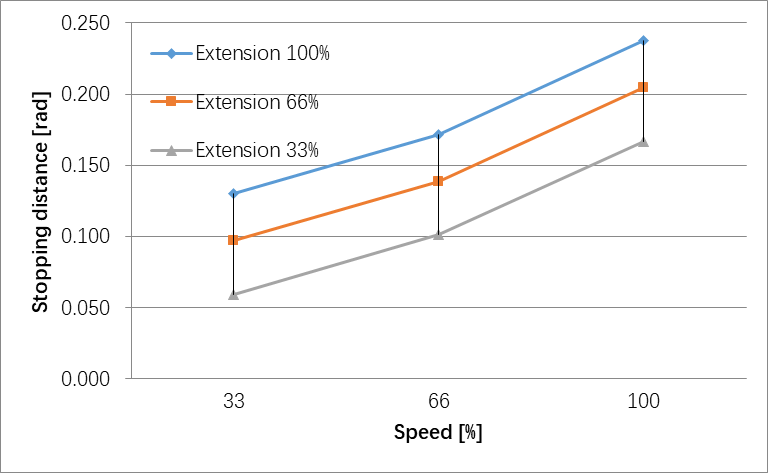
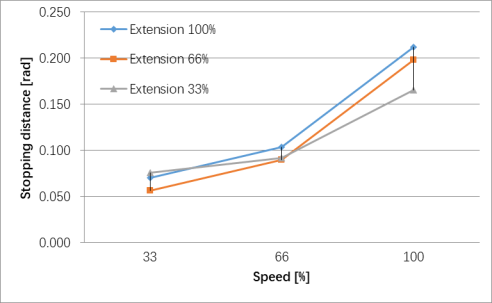
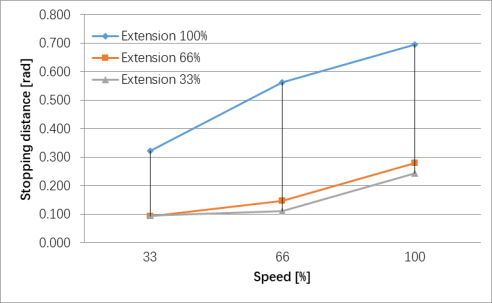
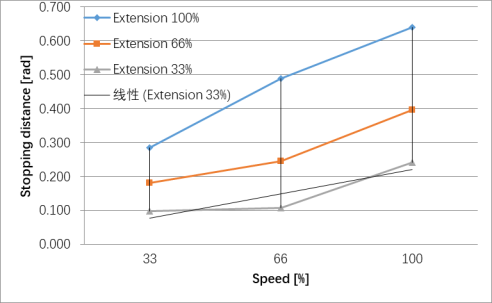
J1 STO, payload 100%,Stopping distance#
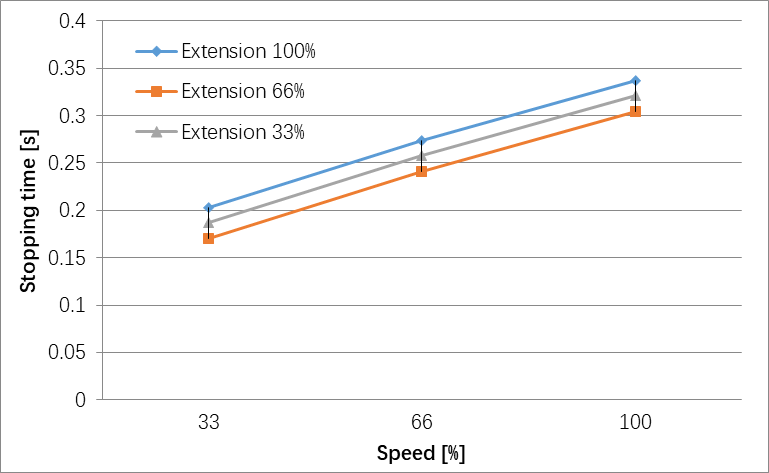
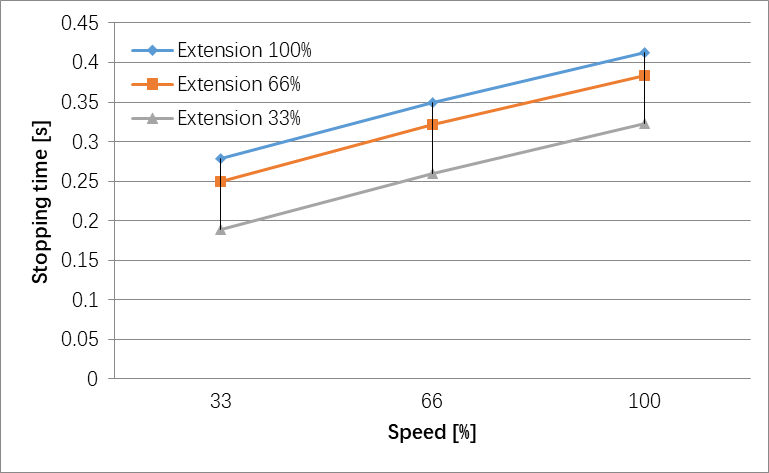
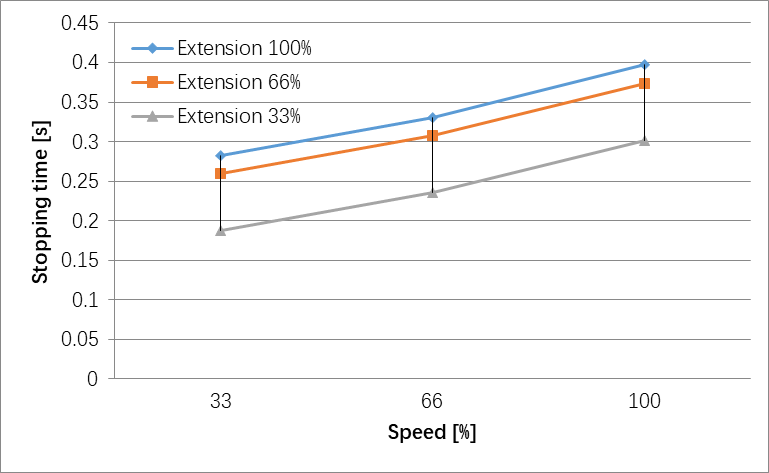
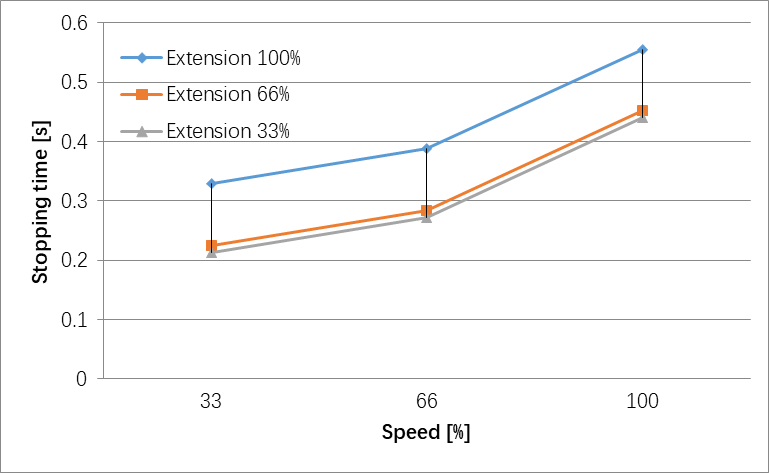
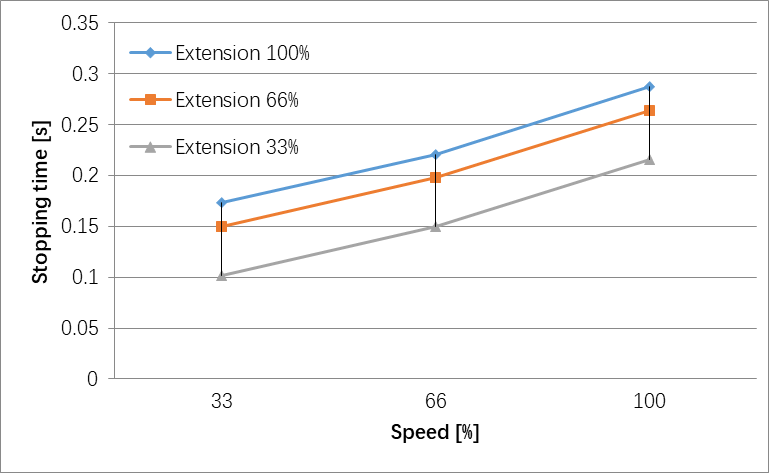
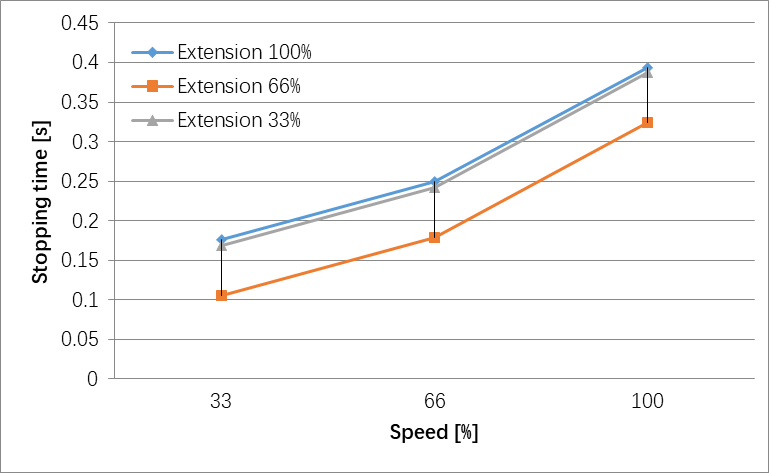
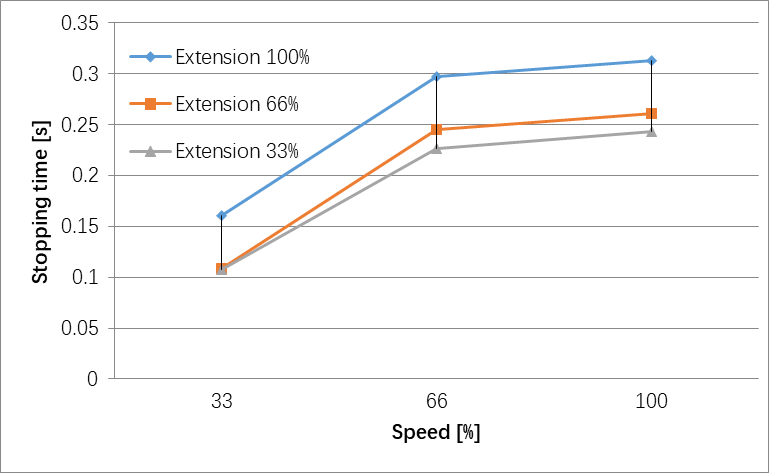
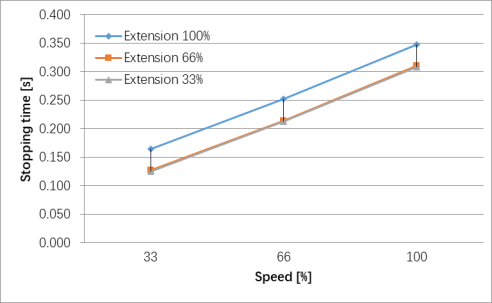
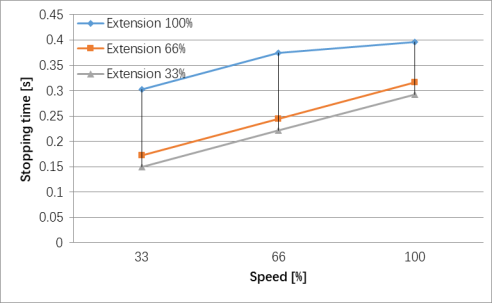
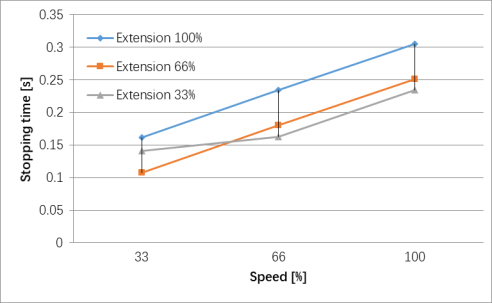
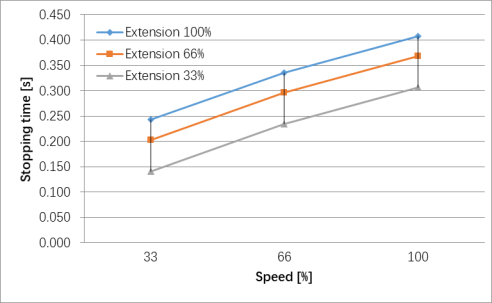
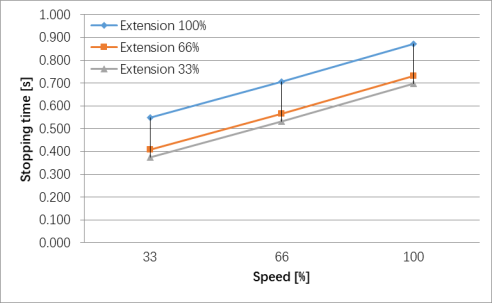
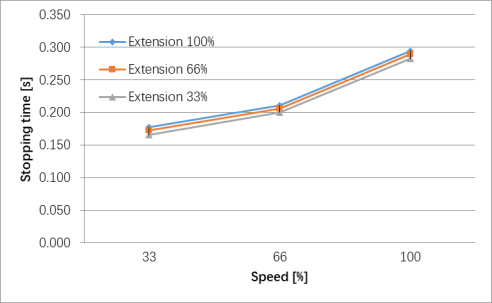
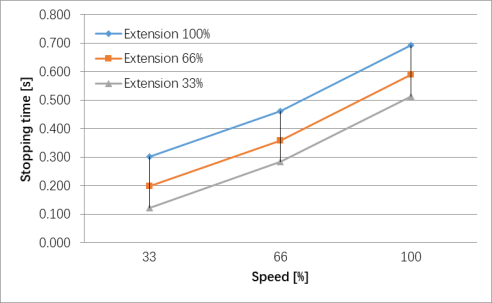
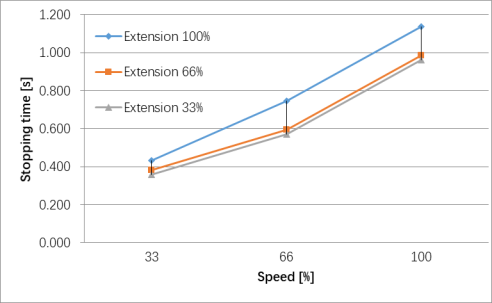
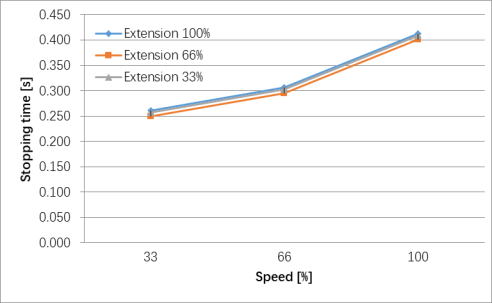
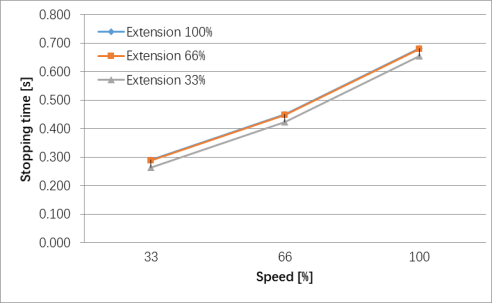
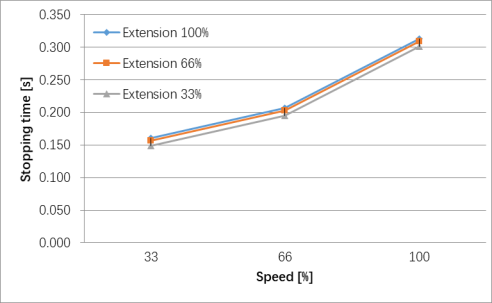
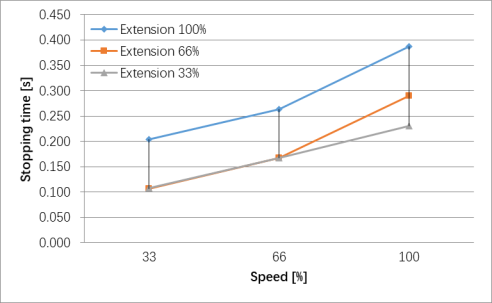
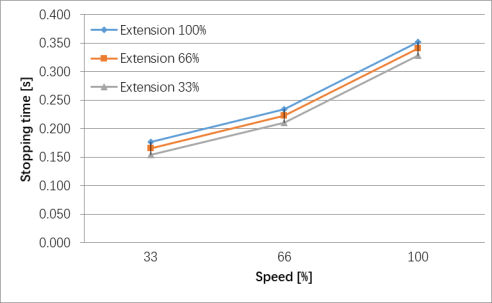
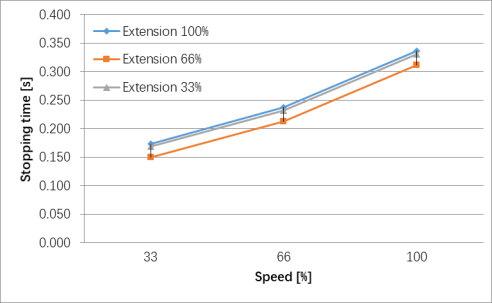
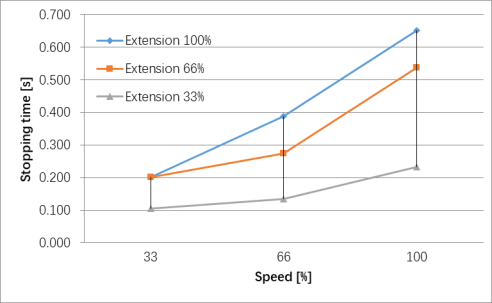
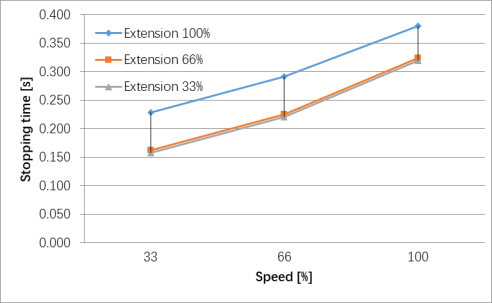
J1 STO,payload 100%,Stopping time#
J1 STO, payload 66%,Stopping distance#
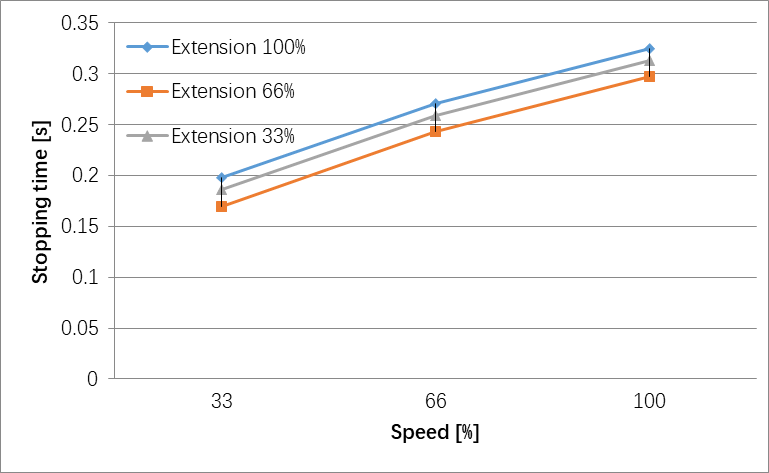
J1 STO,payload 66%,Stopping time#
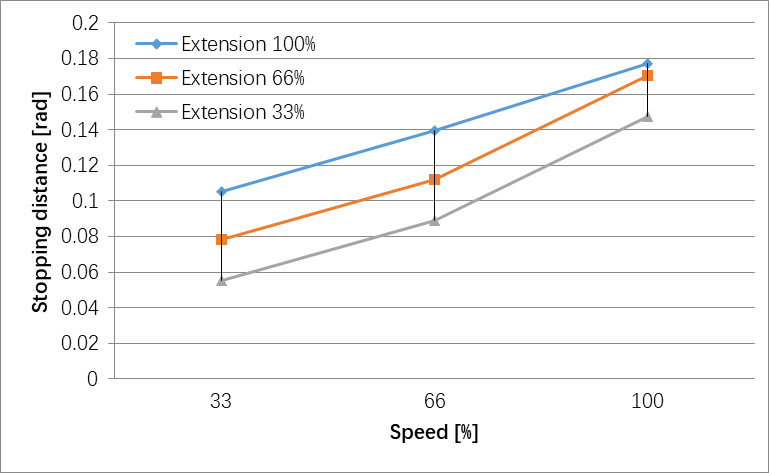
J1 STO, payload 33%,Stopping distance#
J1 STO,payload 33%,Stopping time#
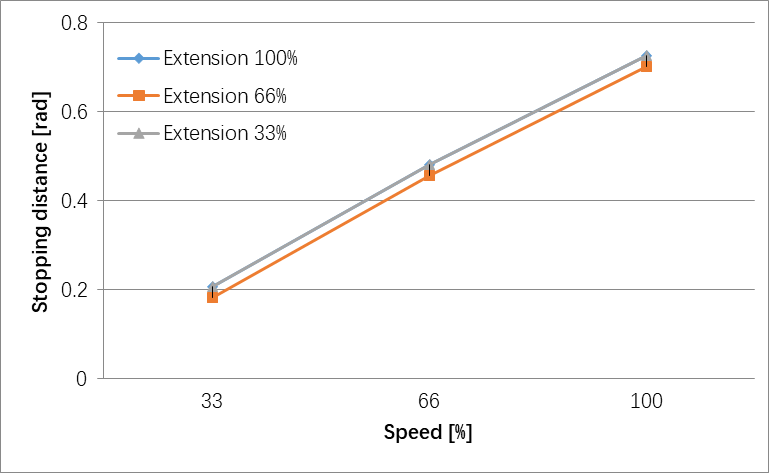
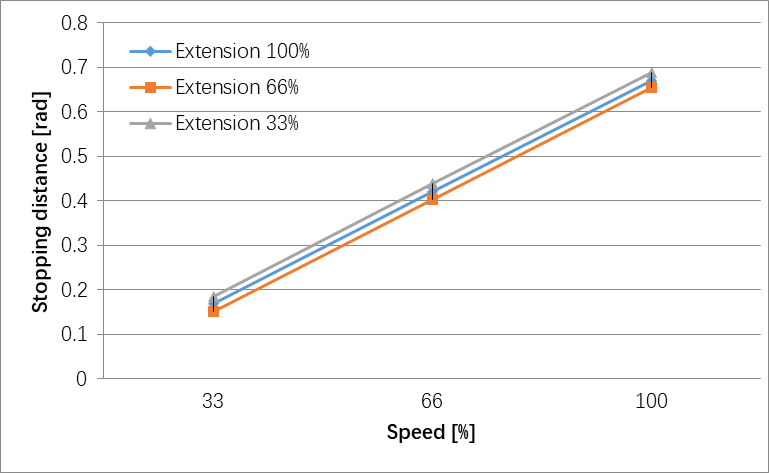
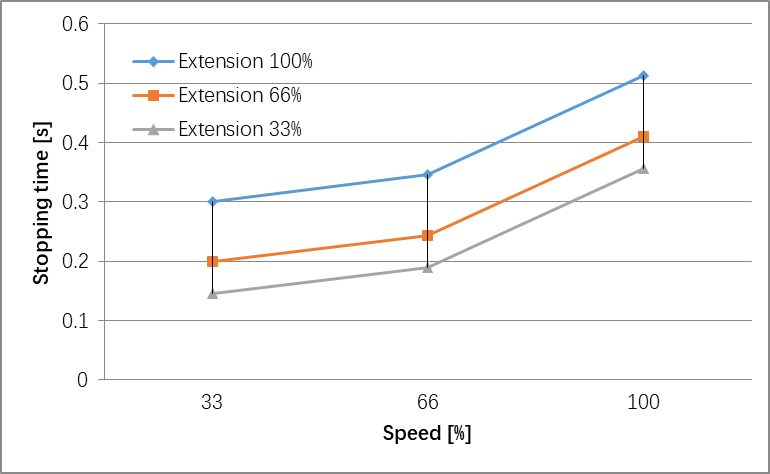
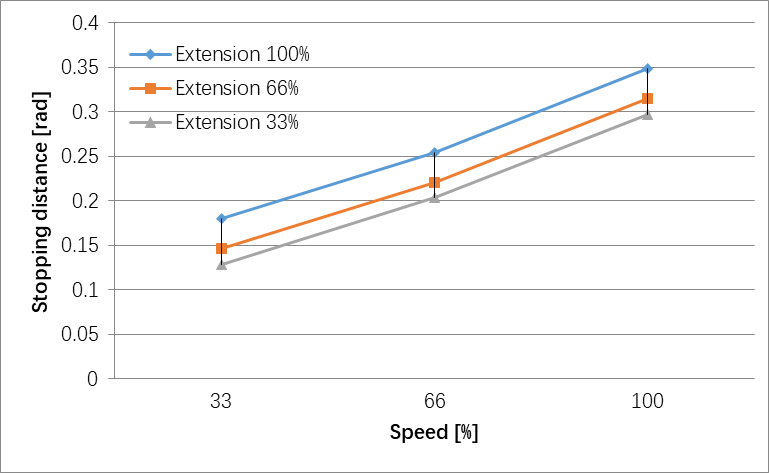
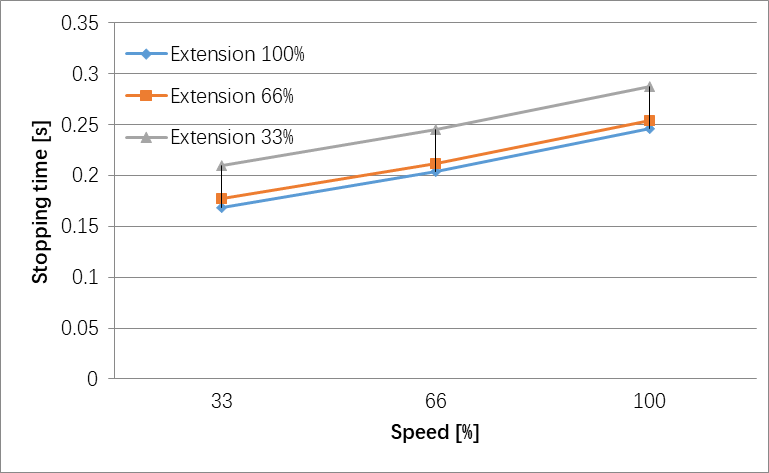
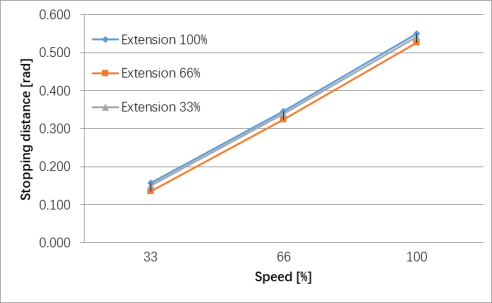
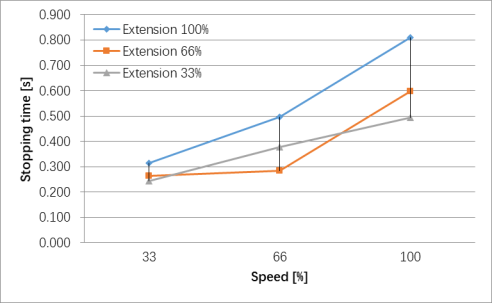
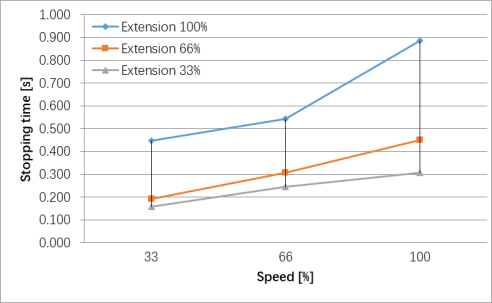
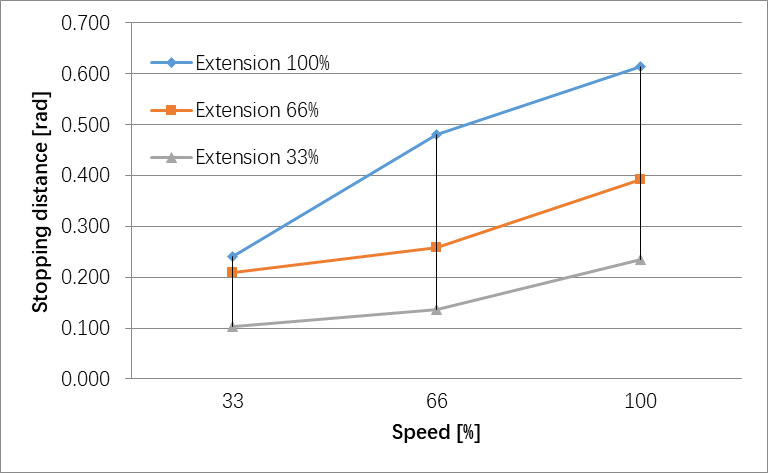
J1 Joint Stop Category 1:
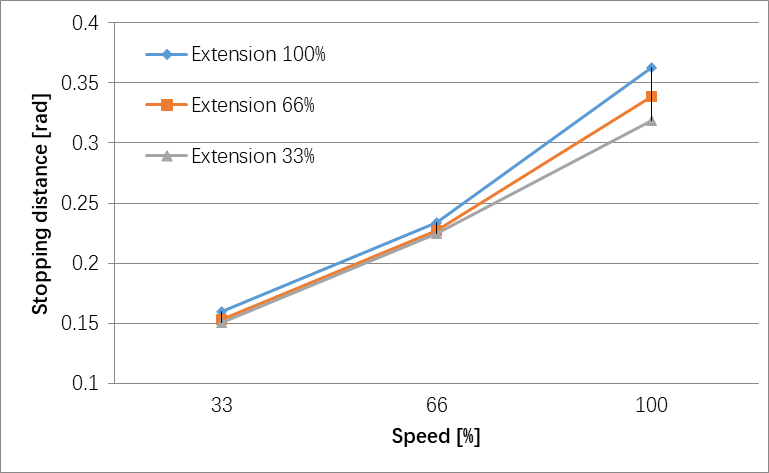
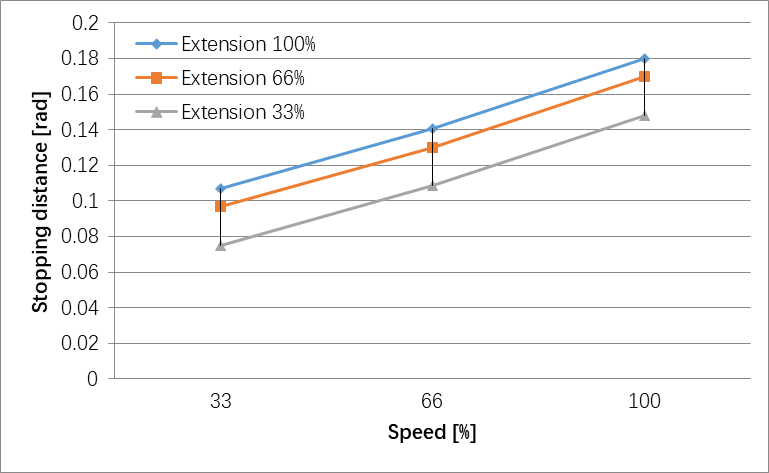
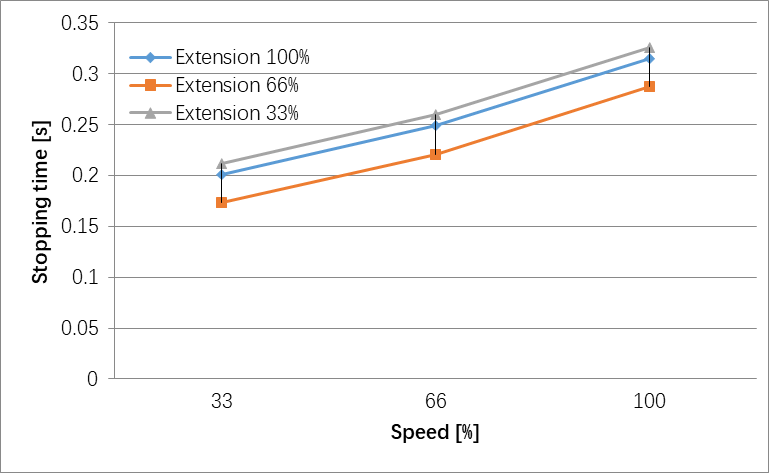
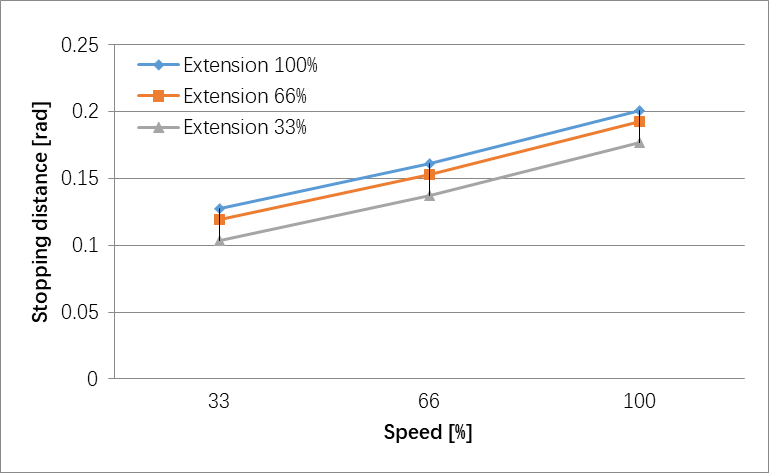
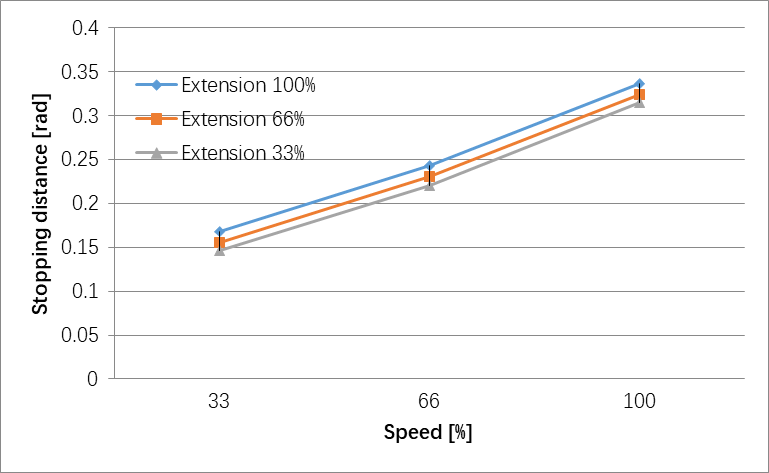
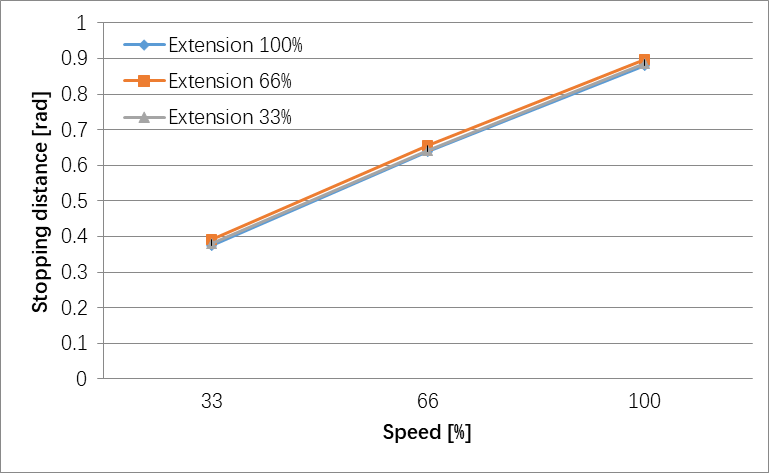
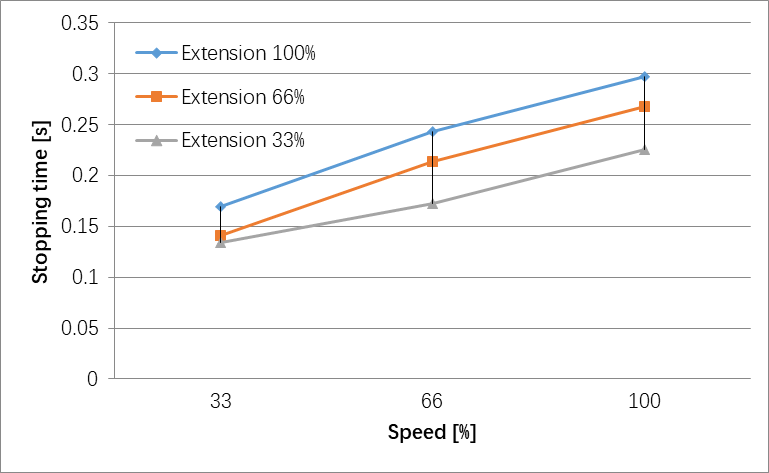
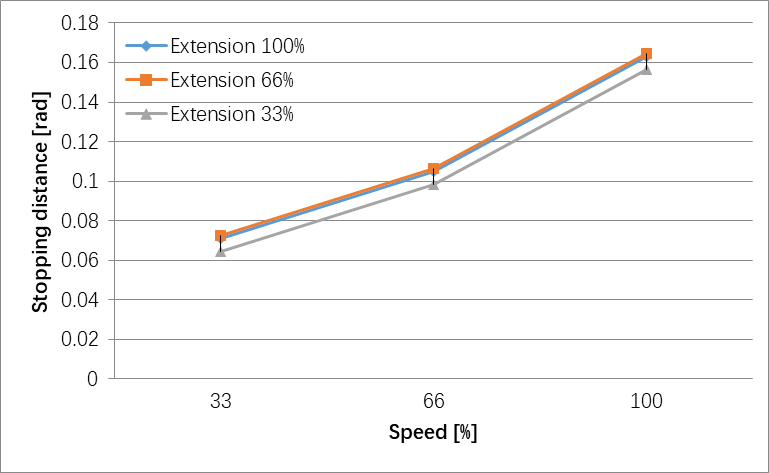
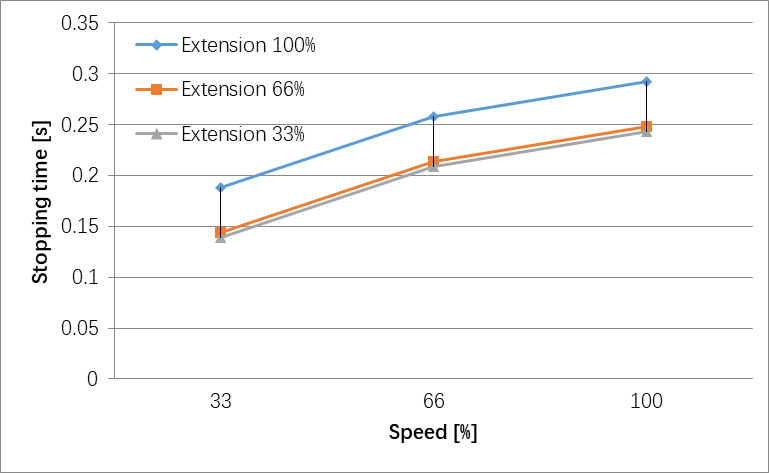
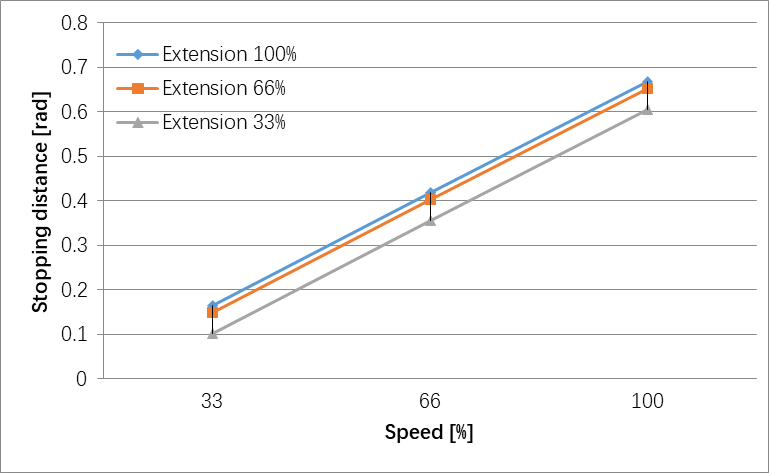
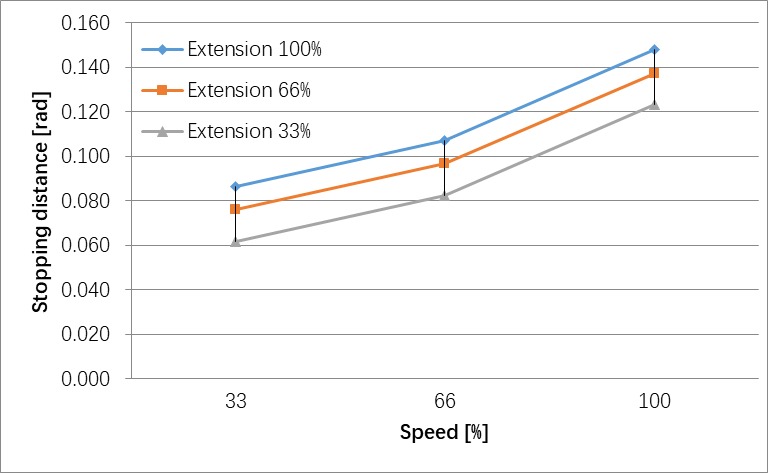
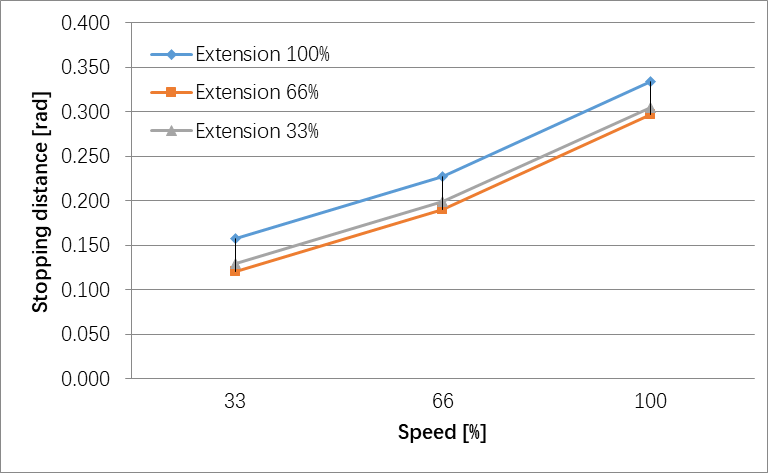
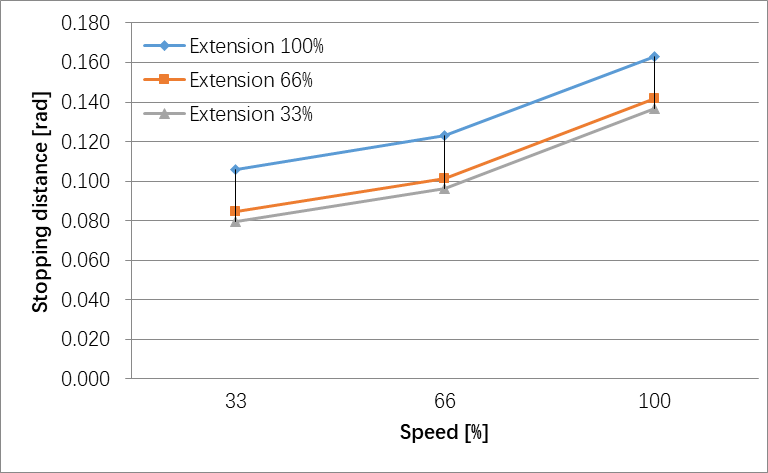
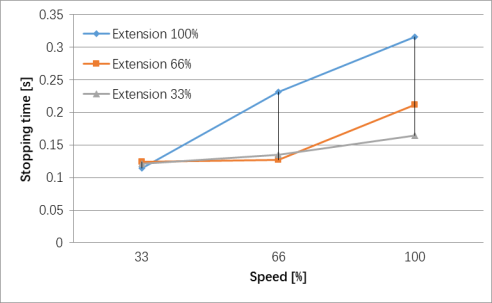
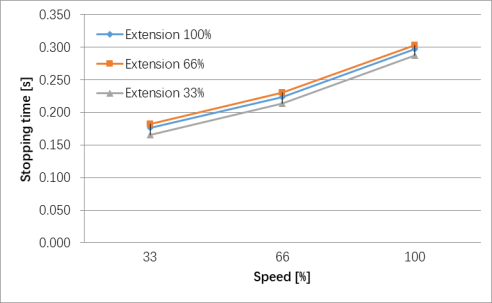
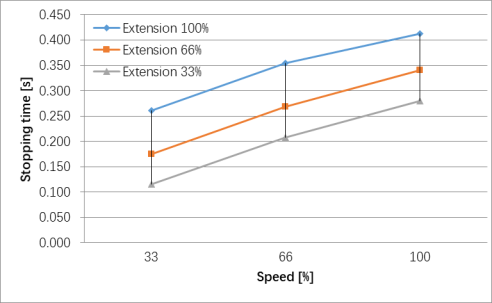
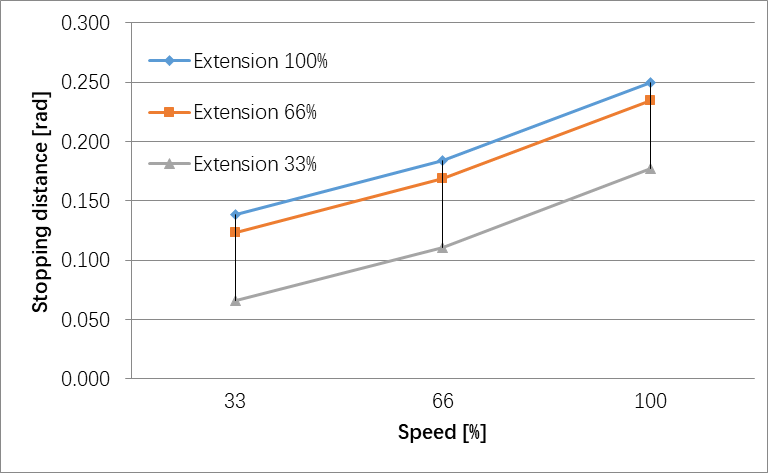
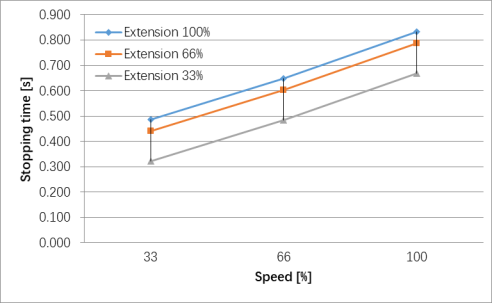
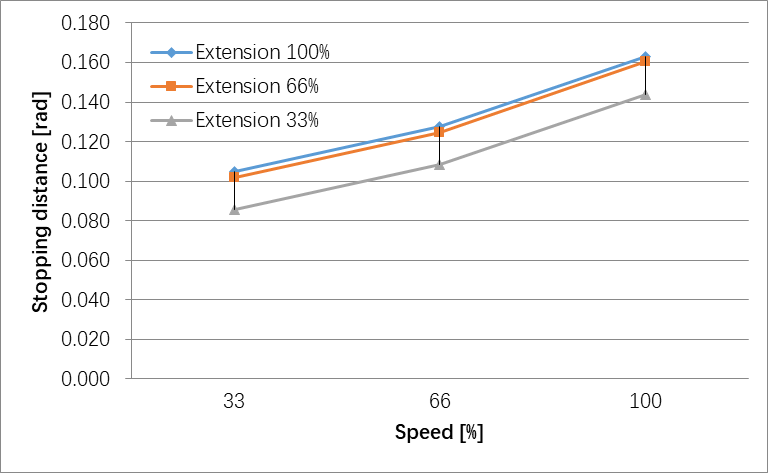
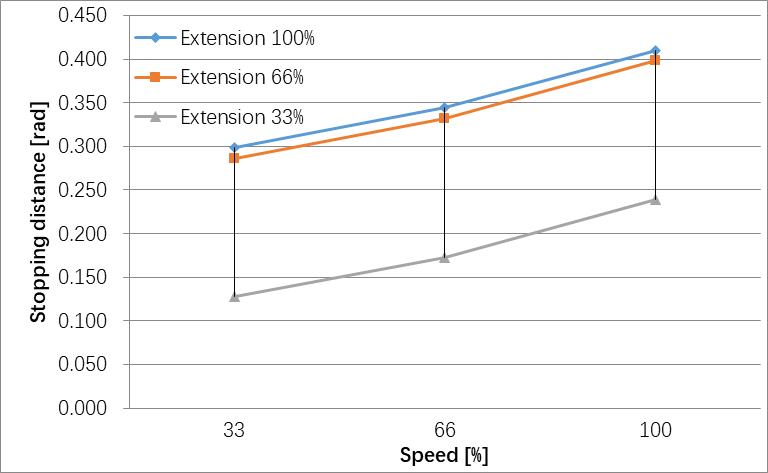
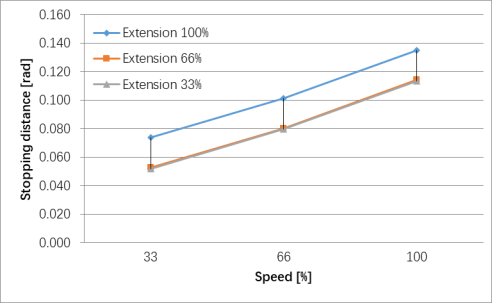
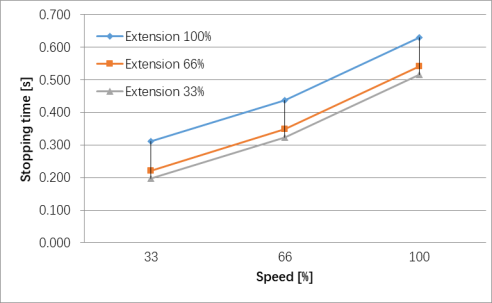
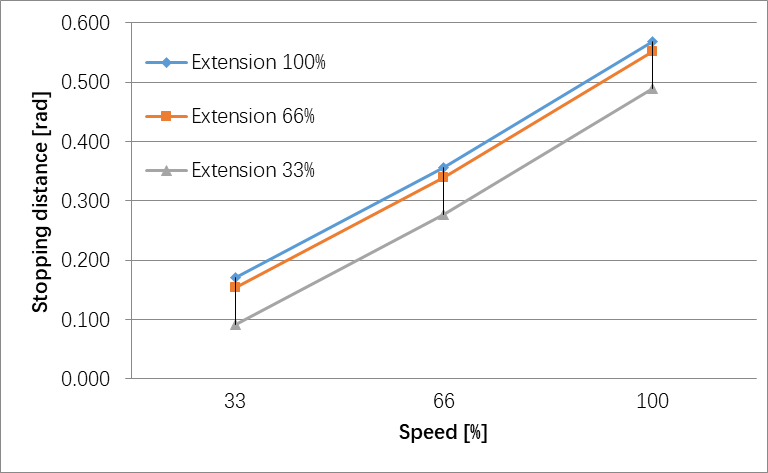
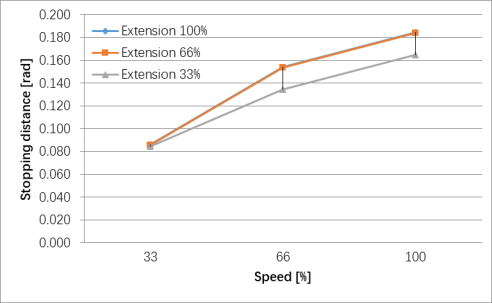
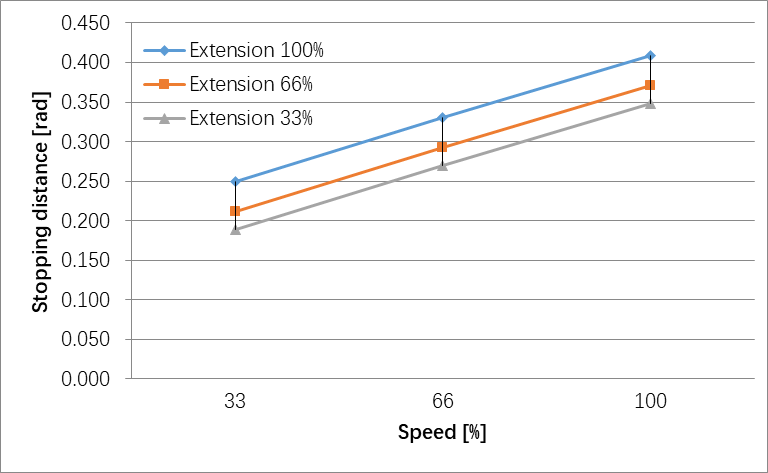
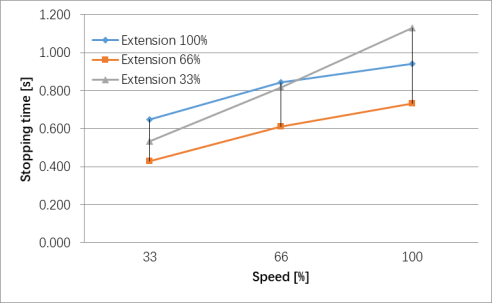
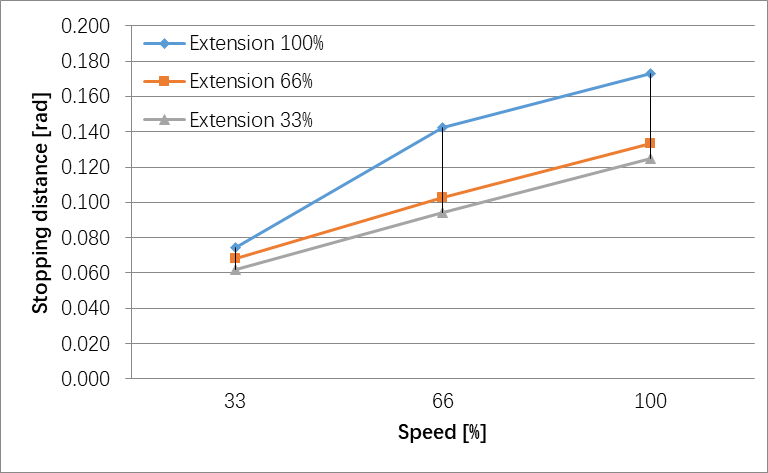
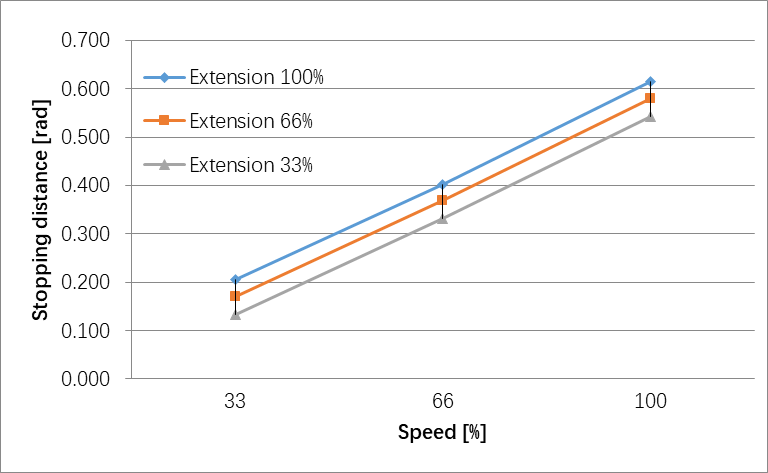
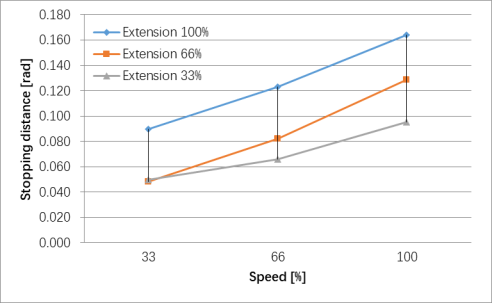
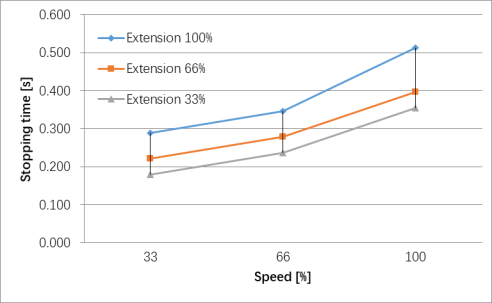
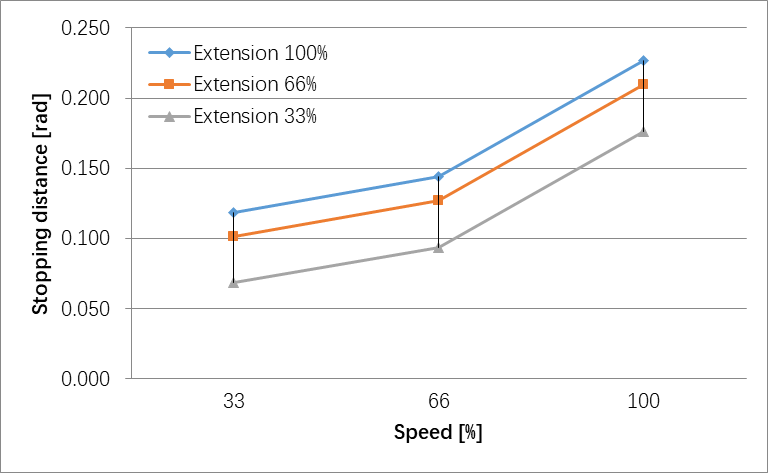
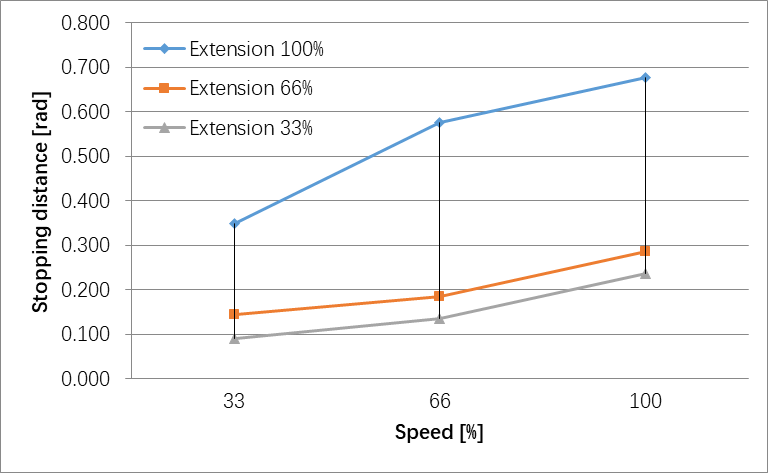
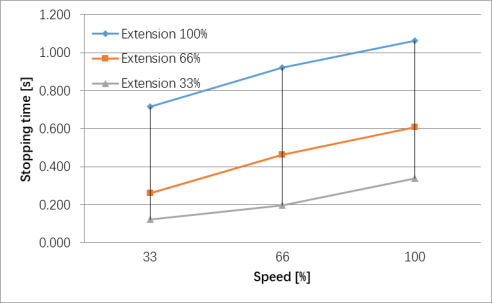
J1 STOP1, payload 100%,Stopping distance#
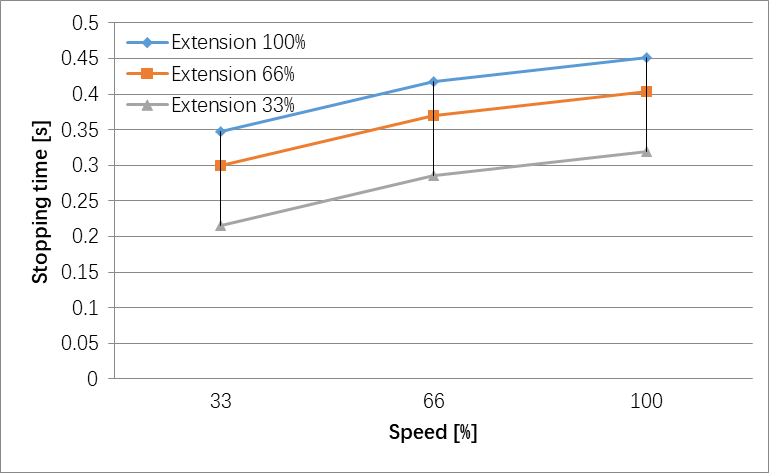
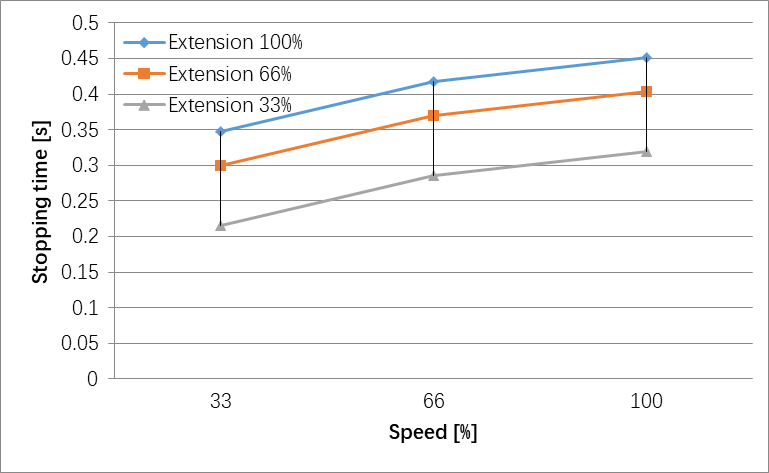
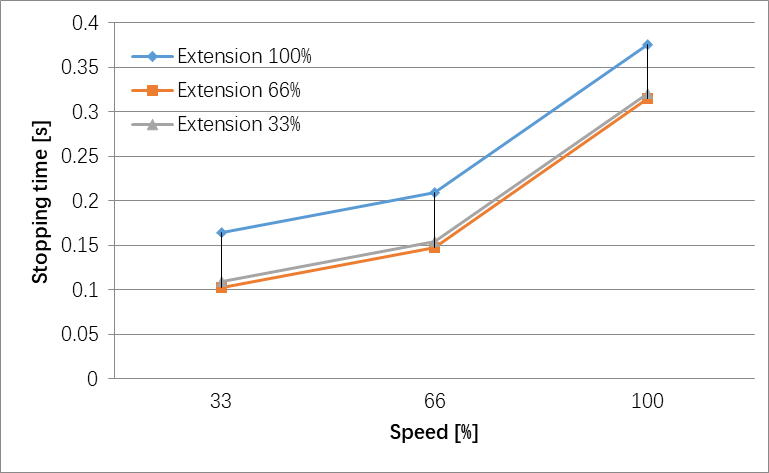
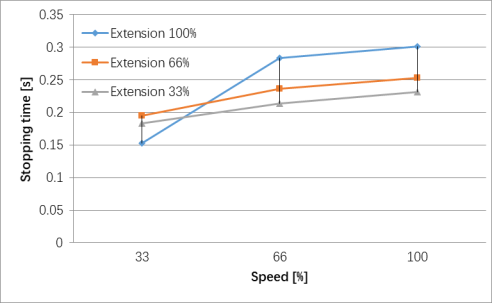
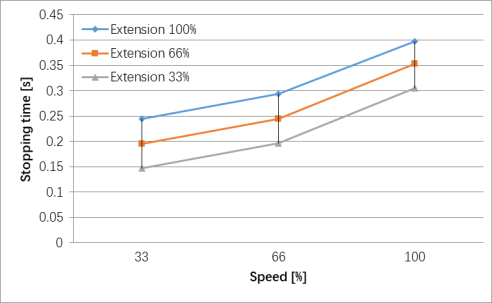
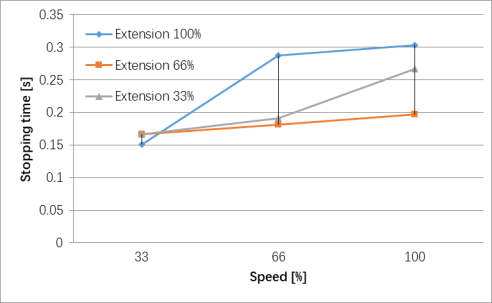
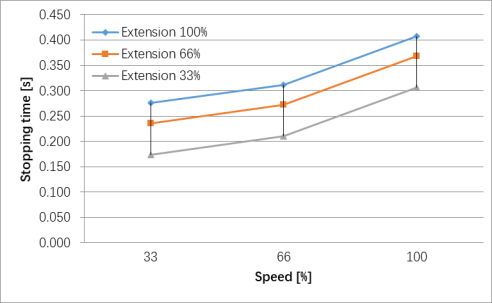
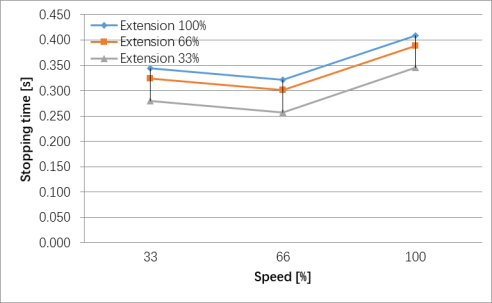
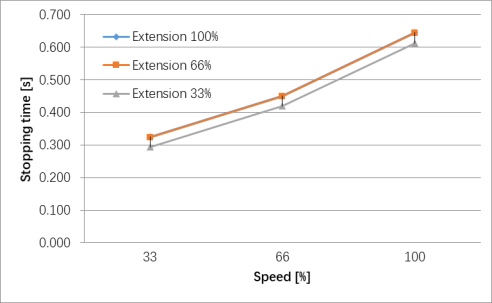
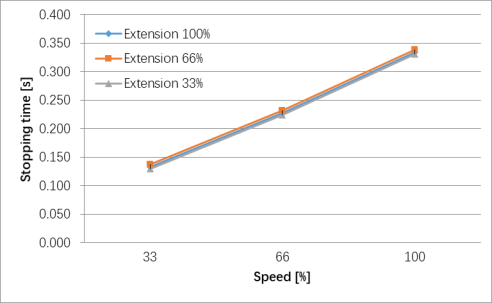
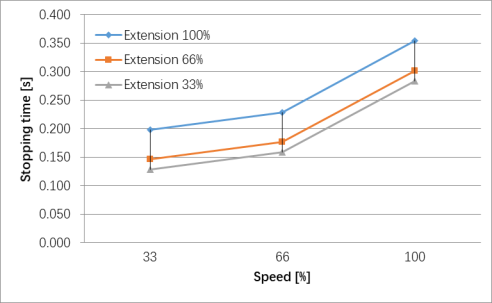
J1 STOP1,payload 100%,Stopping time#
J1 STOP1, payload 66%,Stopping distance#
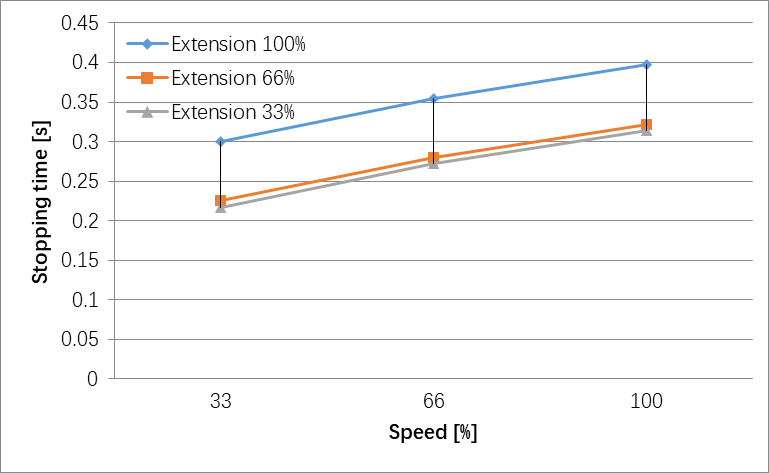
J1 STOP1,payload 66%,Stopping time#

J1 STOP1, payload 33%,Stopping distance#

J1 STOP1,payload 33%,Stopping time#
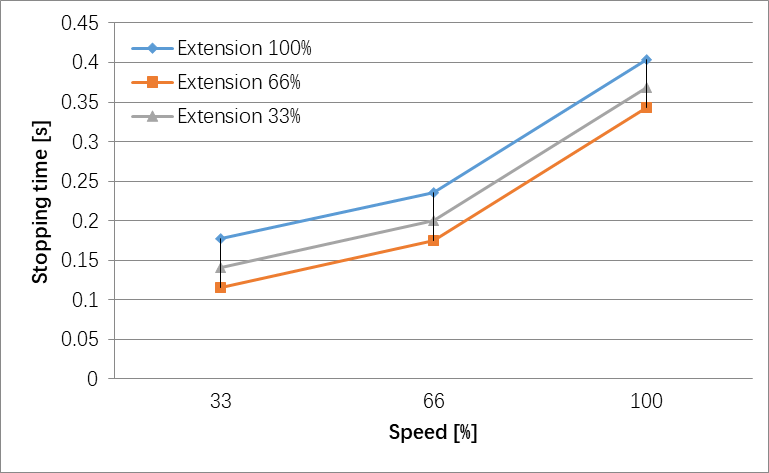
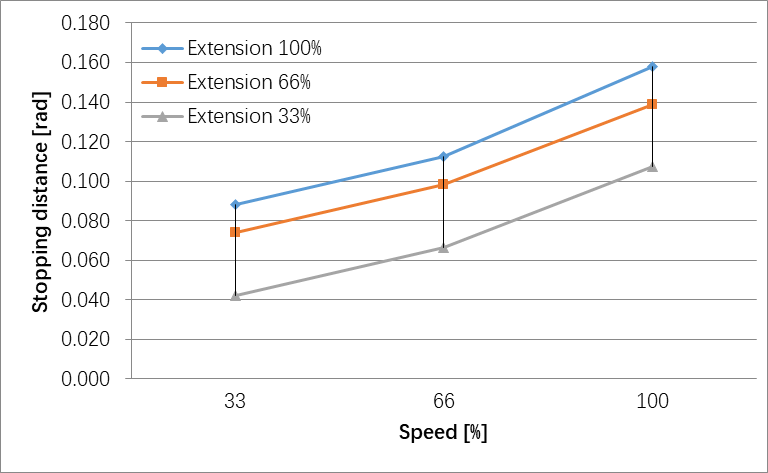
J1 Joint Stop Category 2:
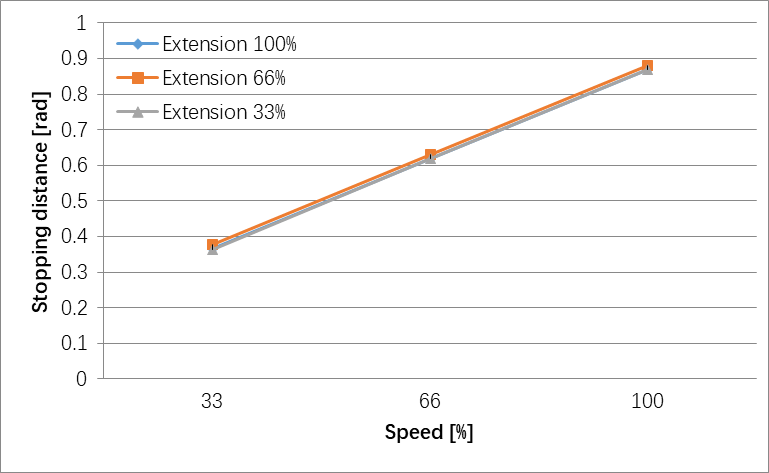
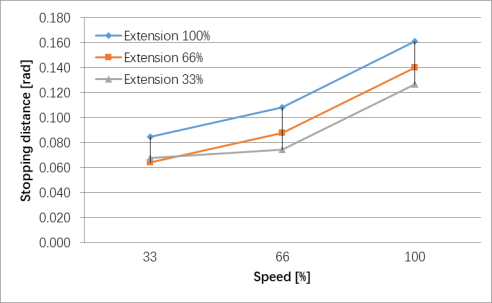
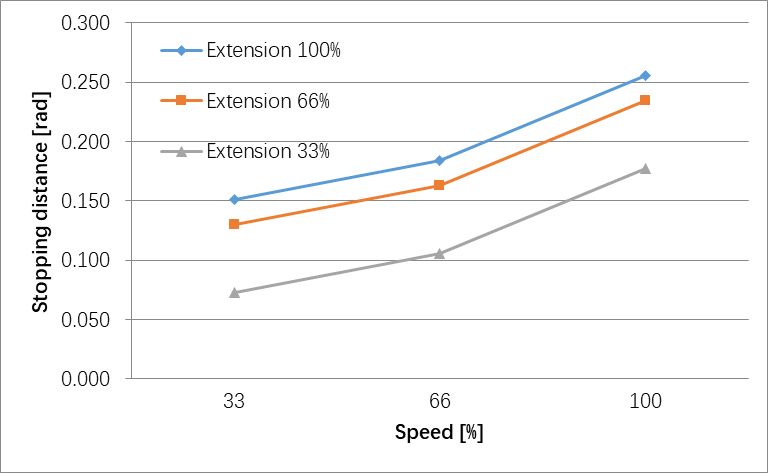
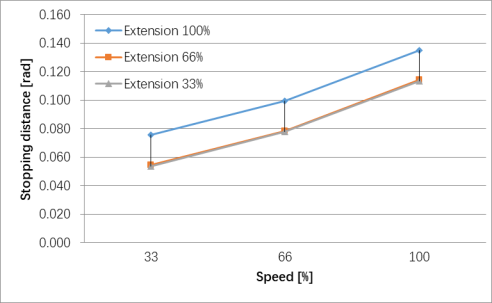
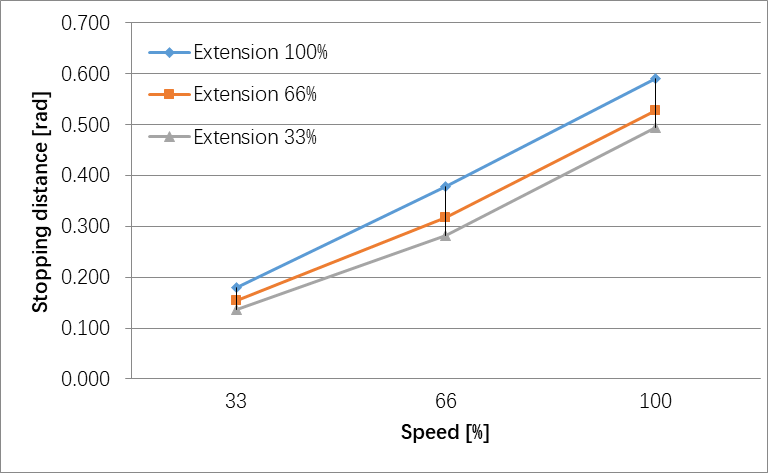
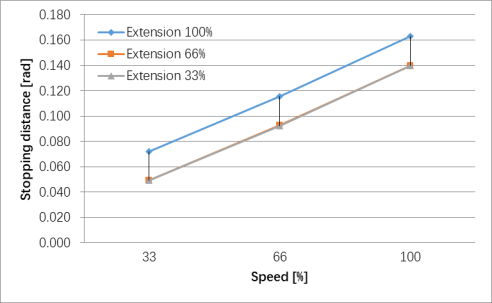
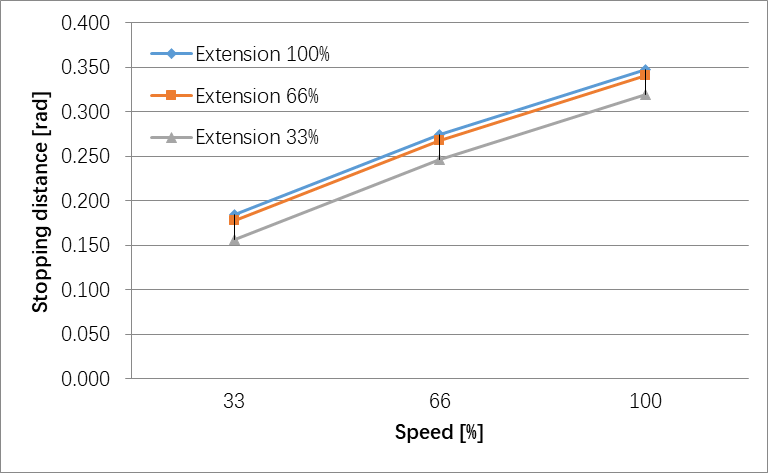
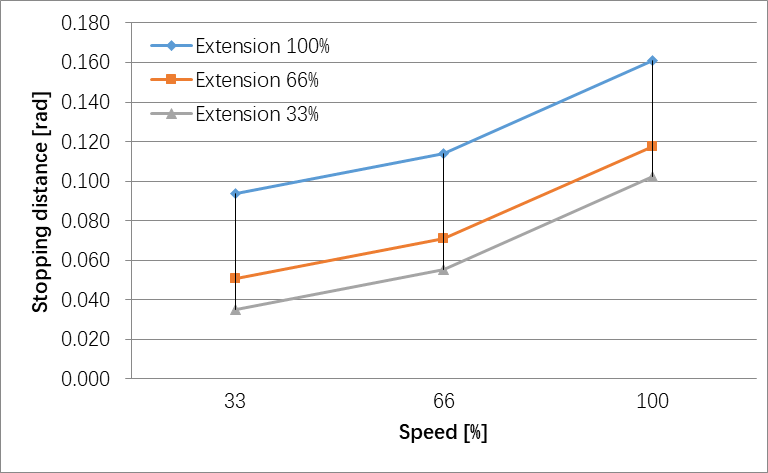
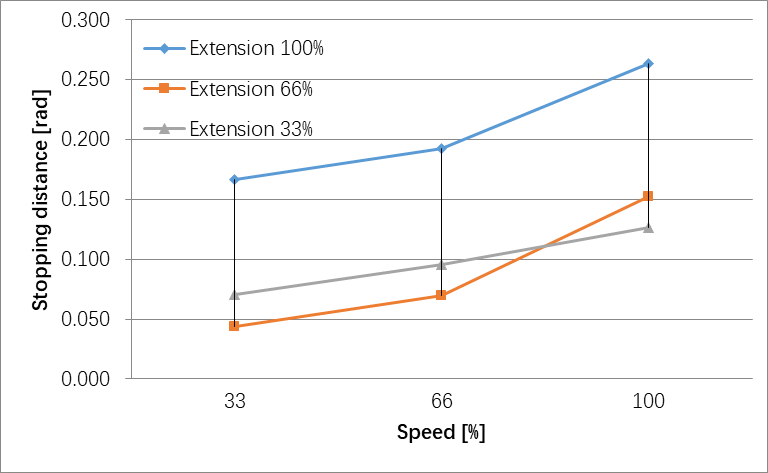
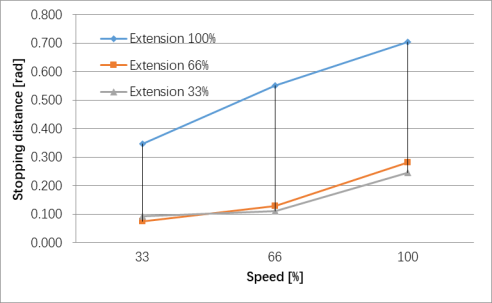
J1 STOP2, payload 100%,Stopping distance#

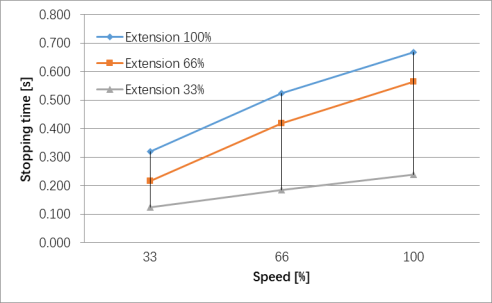
J1 STOP2,payload 100%,Stopping time#
J1 STOP2, payload 66%,Stopping distance#
J1 STOP2,payload 66%,Stopping time#
J1 STOP2, payload 33%,Stopping distance#
J1 STOP2,payload 33%,Stopping time#
J2 Joint Stop Category 0:
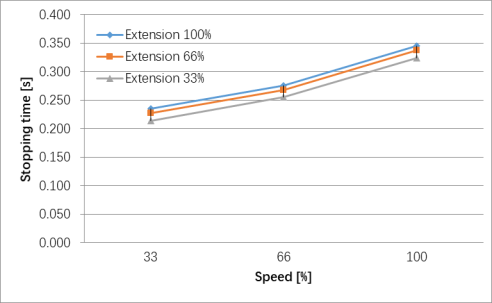
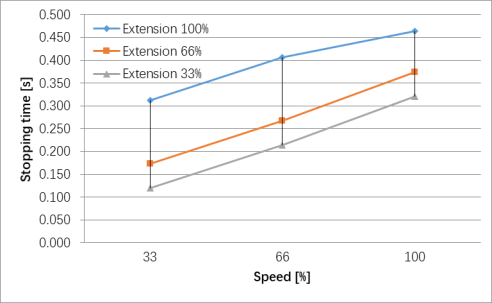
J2 STO, payload 100%,Stopping distance#
J2 STO,payload 100%,Stopping time#
J2 STO, payload 66%,Stopping distance#
J2 STO,payload 66%,Stopping time#
J2 STO, payload 33%,Stopping distance#
J2 STO,payload 33%,Stopping time#
J2 Joint Stop Category 1:
J2 STOP1, payload 100%,Stopping distance#
J2 STOP1,payload 100%,Stopping time#
J2 STOP1, payload 66%,Stopping distance#
J2 STOP1,payload 66%,Stopping time#
J2 STOP1, payload 33%,Stopping distance#
J2 STOP1,payload 33%,Stopping time#
J2 Joint Stop Category 2:
J2 STOP2, payload 100%,Stopping distance#
J2 STOP2,payload 100%,Stopping time#
J2 STOP2, payload 66%,Stopping distance#

J2 STOP2,payload 66%,Stopping time#
J2 STOP2, payload 33%,Stopping distance#
J2 STOP2,payload 33%,Stopping time#
J3 Joint Stop Category 0:

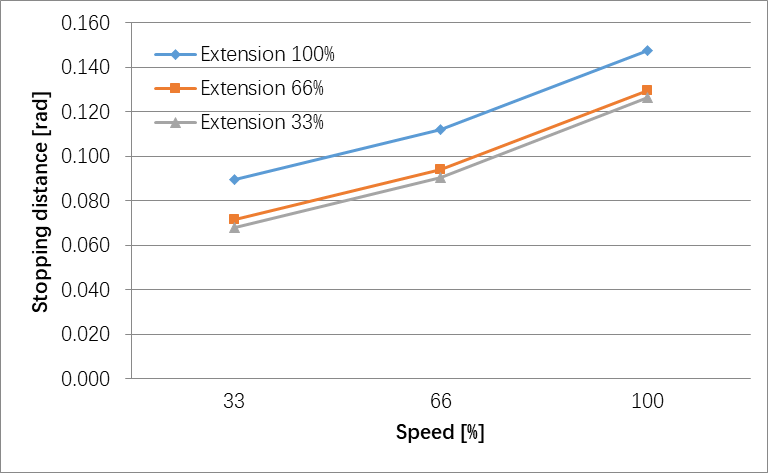
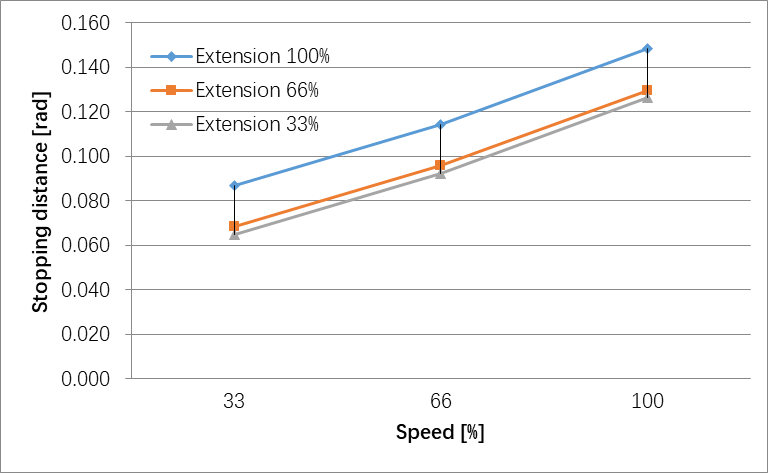
J3 STO, payload 100%,Stopping distance#

J3 STO,payload 100%,Stopping time#
J3 STO, payload 66%,Stopping distance#
J3 STO,payload 66%,Stopping time#
J3 STO, payload 33%,Stopping distance#
J3 STO,payload 33%,Stopping time#
J3 Joint Stop Category 1:
J3 STOP1, payload 100%,Stopping distance#
J3 STOP1,payload 100%,Stopping time#
J3 STOP1, payload 66%,Stopping distance#
J3 STOP1,payload 66%,Stopping time#

J3 STOP1, payload 33%,Stopping distance#
J3 STOP1,payload 33%,Stopping time#
J3 Joint Stop Category 2:
J3 STOP2, payload 100%,Stopping distance#
J3 STOP2,payload 100%,Stopping time#
J3 STOP2, payload 66%,Stopping distance#
J3 STOP2,payload 66%,Stopping time#
J3 STOP2, payload 33%,Stopping distance#
J3 STOP2,payload 33%,Stopping time#
关节 |
停止类型 |
有效载荷 |
伸展 |
速度 |
制动时间 (sec) |
制动距离 (rad) |
|---|---|---|---|---|---|---|
J1 |
STOP2 |
100% |
100% |
100% |
0.584 |
0.727 |
J2 |
STOP2 |
100% |
100% |
100% |
0.556 |
0.931 |
J3 |
STOP2 |
100% |
100% |
100% |
0.404 |
0.656 |
J1 |
STOP1 |
100% |
100% |
100% |
0.408 |
0.363 |
J2 |
STOP1 |
100% |
100% |
100% |
0.452 |
0.337 |
J3 |
STOP1 |
100% |
100% |
100% |
0.292 |
0.348 |
J1 |
STO |
100% |
100% |
100% |
0.337 |
0.239 |
J2 |
STO |
100% |
100% |
100% |
0.413 |
0.207 |
J3 |
STO |
100% |
100% |
100% |
0.313 |
0.174 |
GCR10-1300 and GCR12-1300#
J1 Joint Stop Category 0
J1 STO, payload 100%,Stopping distance#
J1 STO,payload 100%,Stopping time#
J1 STO, payload 66%,Stopping distance#
J1 STO,payload 66%,Stopping time#
J1 STO, payload 33%,Stopping distance#

J1 STO,payload 33%,Stopping time#
J1 Joint Stop Category 1
J1 STOP1, payload 100%,Stopping distance#

J1 STOP1,payload 100%,Stopping time#

J1 STOP1, payload 66%,Stopping distance#

J1 STOP1,payload 66%,Stopping time#
J1 STOP1, payload 33%,Stopping distance#
J1 STOP1,payload 33%,Stopping time#
J1 Joint Stop Category 2
J1 STOP2, payload 100%,Stopping distance#
J1 STOP2,payload 100%,Stopping time#
J1 STOP2, payload 66%,Stopping distance#
J1 STOP2,payload 66%,Stopping time#
J1 STOP2, payload 33%,Stopping distance#
J1 STOP2,payload 33%,Stopping time#
J2 Joint Stop Category 0
J2 STO, payload 100%,Stopping distance#
J2 STO,payload 100%,Stopping time#
J2 STO, payload 66%,Stopping distance#
J2 STO,payload 66%,Stopping time#
J2 STO, payload 33%,Stopping distance#
J2 STO,payload 33%,Stopping time#
J2 Joint Stop Category 1
J2 STOP1, payload 100%,Stopping distance#
J2 STOP1,payload 100%,Stopping time#
J2 STOP1, payload 66%,Stopping distance#
J2 STOP1,payload 66%,Stopping time#
J2 STOP1, payload 33%,Stopping distance#
J2 STOP1,payload 33%,Stopping time#
J2 Joint Stop Category 2:
J2 STOP2, payload 100%,Stopping distance#
J2 STOP2,payload 100%,Stopping time#
J2 STOP2, payload 66%,Stopping distance#

J2 STOP2,payload 66%,Stopping time#
J2 STOP2, payload 33%,Stopping distance#
J2 STOP2,payload 33%,Stopping time#
J3 Joint Stop Category 0
J3 STO, payload 100%,Stopping distance#

J3 STO,payload 100%,Stopping time
J3 STO, payload 66%,Stopping distance#
J3 STO,payload 66%,Stopping time#

J3 STO, payload 33%,Stopping distance#
J3 STO,payload 33%,Stopping time#
J3 Joint Stop Category 1
J3 STOP1, payload 100%,Stopping distance#
J3 STOP1,payload 100%,Stopping time
J3 STOP1, payload 66%,Stopping distance#

J3 STOP1,payload 66%,Stopping time#
J3 STOP1, payload 33%,Stopping distance#
J3 STOP1,payload 33%,Stopping time#
J3 Joint Stop Category 2
J3 STOP2, payload 100%,Stopping distance#
J3 STOP2,payload 100%,Stopping time#
J3 STOP2, payload 66%,Stopping distance#
J3 STOP2,payload 66%,Stopping time#
J3 STOP2, payload 33%,Stopping distance#
J3 STOP2,payload 33%,Stopping time#
关节 |
停止类型 |
有效载荷 |
伸展 |
速度 |
制动时间 (sec) |
制动距离 (rad) |
|---|---|---|---|---|---|---|
J1 |
STOP2 |
100% |
100% |
100% |
0 .398 |
0.348 |
J2 |
STOP2 |
100% |
100% |
100% |
0.431 |
0.341 |
J3 |
STOP2 |
100% |
100% |
100% |
0.388 |
0.275 |
J1 |
STOP1 |
100% |
100% |
100% |
0.354 |
0.176 |
J2 |
STOP1 |
100% |
100% |
100% |
0.364 |
0.205 |
J3 |
STOP1 |
100% |
100% |
100% |
0.384 |
0.174 |
J1 |
STO |
100% |
100% |
100% |
0.313 |
0.152 |
J2 |
STO |
100% |
100% |
100% |
0.303 |
0.163 |
J3 |
STO |
100% |
100% |
100% |
0.281 |
0.163 |
GCR20-1400#
J1 Joint Stop Category 0
J1 STO, payload 100%,Stopping distance#

J1 STO,payload 100%,Stopping time#
J1 STO, payload 66%,Stopping distance#
J1 STO,payload 66%,Stopping time#
J1 STO, payload 33%,Stopping distance#
J1 STO,payload 33%,Stopping time#
J1 Joint Stop Category 1
J1 STOP1, payload 100%,Stopping distance#
J1 STOP1,payload 100%,Stopping time#
J1 STOP1, payload 66%,Stopping distance#
J1 STOP1,payload 66%,Stopping time#
J1 STOP1, payload 33%,Stopping distance#
J1 STOP1,payload 33%,Stopping time#
J1 Joint Stop Category 2
J1 STOP2, payload 100%,Stopping distance#
J1 STOP2,payload 100%,Stopping time#
J1 STOP2, payload 66%,Stopping distance#
J1 STOP2,payload 66%,Stopping time#
J1 STOP2, payload 33%,Stopping distance#
J1 STOP2,payload 33%,Stopping time#
J2 Joint Stop Category 0
J2 STO, payload 100%,Stopping distance#
J2 STO,payload 100%,Stopping time#
J2 STO, payload 66%,Stopping distance#
J2 STO,payload 66%,Stopping time#

J2 STO, payload 33%,Stopping distance#

J2 STO,payload 33%,Stopping time#
J2 Joint Stop Category 1

J2 STOP1, payload 100%,Stopping distance#
J2 STOP1,payload 100%,Stopping time#
J2 STOP1, payload 66%,Stopping distance#
J2 STOP1,payload 66%,Stopping time#
J2 STOP1, payload 33%,Stopping distance#
J2 STOP1,payload 33%,Stopping time#
J2 Joint Stop Category 2
J2 STOP2, payload 100%,Stopping distance#
J2 STOP2,payload 100%,Stopping time#

J2 STOP2, payload 66%,Stopping distance#
J2 STOP2,payload 66%,Stopping time#

J2 STOP2, payload 33%,Stopping distance#
J2 STOP2,payload 33%,Stopping time#
J3 Joint Stop Category 0
J3 STO, payload 100%,Stopping distance#
J3 STO,payload 100%,Stopping time#
J3 STO, payload 66%,Stopping distance#

J3 STO,payload 66%,Stopping time#
J3 STO, payload 33%,Stopping distance#
J3 STO,payload 33%,Stopping time#
J3 Joint Stop Category 1
J3 STOP1, payload 100%,Stopping distance#
J3 STOP1,payload 100%,Stopping time#

J3 STOP1, payload 66%,Stopping distance#
J3 STOP1,payload 66%,Stopping time#
J3 STOP1, payload 33%,Stopping distance#
J3 STOP1,payload 33%,Stopping time#
J3 Joint Stop Category 2
J3 STOP2, payload 100%,Stopping distance#
J3 STOP2,payload 100%,Stopping time#

J3 STOP2, payload 66%,Stopping distance#
J3 STOP2,payload 66%,Stopping time#
J3 STOP2, payload 33%,Stopping distance#
J3 STOP2,payload 33%,Stopping time#
关节 |
停止类型 |
有效载荷 |
伸展 |
速度 |
制动时间 (sec) |
制动距离 (rad) |
|---|---|---|---|---|---|---|
J1 |
STOP2 |
100% |
100% |
100% |
0.864 |
0.547 |
J2 |
STOP2 |
100% |
100% |
100% |
0.872 |
0.580 |
J3 |
STOP2 |
100% |
100% |
100% |
1.121 |
0.786 |
J1 |
STOP1 |
100% |
100% |
100% |
0.412 |
0.256 |
J2 |
STOP1 |
100% |
100% |
100% |
0.408 |
0.410 |
J3 |
STOP1 |
100% |
100% |
100% |
0.454 |
0.312 |
J1 |
STO |
100% |
100% |
100% |
0.314 |
0.148 |
J2 |
STO |
100% |
100% |
100% |
0.336 |
0.163 |
J3 |
STO |
100% |
100% |
100% |
0.294 |
0.135 |
GCR16-960#
J1 Joint Stop Category 0
J1 STO, payload 100%,Stopping distance#
J1 STO,payload 100%,Stopping time#
J1 STO, payload 66%,Stopping distance#
J1 STO,payload 66%,Stopping time#
J1 STO, payload 33%,Stopping distance#
J1 STO,payload 33%,Stopping time#
J1 Joint Stop Category 1
J1 STOP1, payload 100%,Stopping distance#
J1 STOP1,payload 100%,Stopping time#

J1 STOP1, payload 66%,Stopping distance#
J1 STOP1,payload 66%,Stopping time#
J1 STOP1, payload 33%,Stopping distance#

J1 STOP1,payload 33%,Stopping time#
J1 Joint Stop Category 2
J1 STOP2, payload 100%,Stopping distance#
J1 STOP2,payload 100%,Stopping time#
J1 STOP2, payload 66%,Stopping distance#
J1 STOP2,payload 66%,Stopping time#
J1 STOP2, payload 33%,Stopping distance#
J1 STOP2,payload 33%,Stopping time#
J2 Joint Stop Category 0

J2 STO, payload 100%,Stopping distance#
J2 STO,payload 100%,Stopping time#
J2 STO, payload 66%,Stopping distance#
J2 STO,payload 66%,Stopping time#
J2 STO, payload 33%,Stopping distance#
J2 STO,payload 33%,Stopping time#
J2 Joint Stop Category 1
J2 STOP1, payload 100%,Stopping distance#
J2 STOP1,payload 100%,Stopping time#
J2 STOP1, payload 66%,Stopping distance#
J2 STOP1,payload 66%,Stopping time#
J2 STOP1, payload 33%,Stopping distance#
J2 STOP1,payload 33%,Stopping time#
J2 Joint Stop Category 2

J2 STOP2, payload 100%,Stopping distance#
J2 STOP2,payload 100%,Stopping time#
J2 STOP2, payload 66%,Stopping distance#
J2 STOP2,payload 66%,Stopping time#

J2 STOP2, payload 33%,Stopping distance#
J2 STOP2,payload 33%,Stopping time#
J3 Joint Stop Category 0
J3 STO, payload 100%,Stopping distance#
J3 STO,payload 100%,Stopping time#
J3 STO, payload 66%,Stopping distance#
J3 STO,payload 66%,Stopping time#
J3 STO, payload 33%,Stopping distance#

J3 STO,payload 33%,Stopping time#
J3 Joint Stop Category 1
J3 STOP1, payload 100%,Stopping distance#

J3 STOP1,payload 100%,Stopping time#

J3 STOP1, payload 66%,Stopping distance#
J3 STOP1,payload 66%,Stopping time#
J3 STOP1, payload 33%,Stopping distance#
J3 STOP1,payload 33%,Stopping time#
J3 Joint Stop Category 2
J3 STOP2, payload 100%,Stopping distance#
J3 STOP2,payload 100%,Stopping time#
J3 STOP2, payload 66%,Stopping distance#

J3 STOP2,payload 66%,Stopping time#
J3 STOP2, payload 33%,Stopping distance#
J3 STOP2,payload 33%,Stopping time#
关节 |
停止类型 |
有效载荷 |
伸展 |
速度 |
制动时间 (sec) |
制动距离 (rad) |
|---|---|---|---|---|---|---|
J1 |
STOP2 |
100% |
100% |
100% |
1.136 |
0.590 |
J2 |
STOP2 |
100% |
100% |
100% |
1.384 |
0.508 |
J3 |
STOP2 |
100% |
100% |
100% |
0.87 |
0.615 |
J1 |
STOP1 |
100% |
100% |
100% |
0.692 |
0.328 |
J2 |
STOP1 |
100% |
100% |
100% |
0.681 |
0.413 |
J3 |
STOP1 |
100% |
100% |
100% |
0.512 |
0.348 |
J1 |
STO |
100% |
100% |
100% |
0.456 |
0.205 |
J2 |
STO |
100% |
100% |
100% |
0.447 |
0.197 |
J3 |
STO |
100% |
100% |
100% |
0.345 |
0.163 |
GCR30-1100#
J1 Joint Stop Category 0
J1 STO, payload 100%,Stopping distance#

J1 STO,payload 100%,Stopping time#
J1 STO, payload 66%,Stopping distance#
J1 STO,payload 66%,Stopping time#
J1 STO, payload 33%,Stopping distance#
J1 STO,payload 33%,Stopping time#
J1 Joint Stop Category 1

J1 STOP1, payload 100%,Stopping distance#
J1 STOP1,payload 100%,Stopping time#
J1 STOP1, payload 66%,Stopping distance#
J1 STOP1,payload 66%,Stopping time#

J1 STOP1, payload 33%,Stopping distance#
J1 STOP1,payload 33%,Stopping time#
J1 Joint Stop Category 2
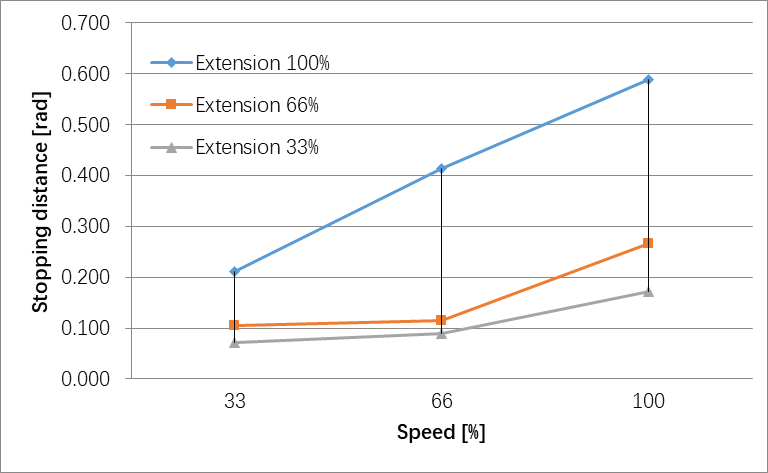
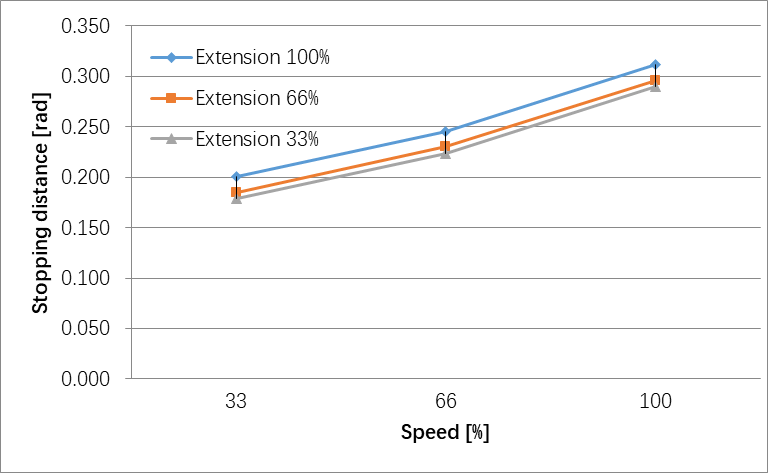
Figure 2‑227 J1 STOP2, payload 100%,Stopping distance#
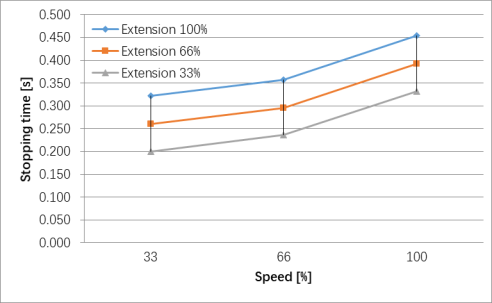
J1 STOP2,payload 100%,Stopping time#
J1 STOP2, payload 66%,Stopping distance#
J1 STOP2,payload 66%,Stopping time#
J1 STOP2, payload 33%,Stopping distance#
J1 STOP2,payload 33%,Stopping time#
J2 Joint Stop Category 0
J2 STO, payload 100%,Stopping distance#
J2 STO,payload 100%,Stopping time#

J2 STO, payload 66%,Stopping distance#
J2 STO,payload 66%,Stopping time#
J1 STO, payload 33%,Stopping distance#
J2 STO,payload 33%,Stopping time#
J2 Joint Stop Category 1
J2 STOP1, payload 100%,Stopping distance#
J2 STOP1,payload 100%,Stopping time#
J2 STOP1, payload 66%,Stopping distance#
J2 STOP1,payload 66%,Stopping time#
J2 STOP1, payload 33%,Stopping distance#
J2 STOP1,payload 33%,Stopping time#
J2 Joint Stop Category 2
J2 STOP2, payload 100%,Stopping distance#
J2 STOP2,payload 100%,Stopping time#
J2 STOP2, payload 66%,Stopping distance#
J2 STOP2,payload 66%,Stopping time#
J2 STOP2, payload 33%,Stopping distance#

J2 STOP2,payload 33%,Stopping time#
J3 Joint Stop Category 0

J3 STO, payload 100%,Stopping distance#
J3 STO,payload 100%,Stopping time#
J3 STO, payload 66%,Stopping distance#
J3 STO,payload 66%,Stopping time#
J3 STO, payload 33%,Stopping distance#
J3 STO,payload 33%,Stopping time#
J3 Joint Stop Category 1
J3 STOP1, payload 100%,Stopping distance#

J3 STOP1,payload 100%,Stopping time#
J3 STOP1, payload 66%,Stopping distance#
J3 STOP1,payload 66%,Stopping time#
J3 STOP1, payload 33%,Stopping distance#
J3 STOP1,payload 33%,Stopping time#
J3 Joint Stop Category 2
J3 STOP2, payload 100%,Stopping distance#
J3 STOP2,payload 100%,Stopping time#
J3 STOP2, payload 66%,Stopping distance#
J3 STOP2,payload 66%,Stopping time#
J3 STOP2, payload 33%,Stopping distance#
J3 STOP2,payload 33%,Stopping time#
关节 |
停止类型 |
有效载荷 |
伸展 |
速度 |
制动时间 (sec) |
制动距离 (rad) |
|---|---|---|---|---|---|---|
J1 |
STOP2 |
100% |
100% |
100% |
0.947 |
0.588 |
J2 |
STOP2 |
100% |
100% |
100% |
0.668 |
0.704 |
J3 |
STOP2 |
100% |
100% |
100% |
1.064 |
0.640 |
J1 |
STOP1 |
100% |
100% |
100% |
0.513 |
0.275 |
J2 |
STOP1 |
100% |
100% |
100% |
0.352 |
0.237 |
J3 |
STOP1 |
100% |
100% |
100% |
0.391 |
0.287 |
J1 |
STO |
100% |
100% |
100% |
0.423 |
0.170 |
J2 |
STO |
100% |
100% |
100% |
0.286 |
0.158 |
J3 |
STO |
100% |
100% |
100% |
0.354 |
0.221 |